Настоящее изобретение касается новой конструкции привода для транспортных средств с управляемым скольжением, включая гусеничные или колесные транспортные средства, например военный бронированный танк, но не ограничивается этим.
Гусеничное транспортное средство с управляемым скольжением управляется посредством принуждения двух гусеничных полотен двигаться с разными скоростями (управляемое скольжение). Таким же образом колесное транспортное средство с управляемым скольжением управляется посредством принуждения колес с одной стороны транспортного средства двигаться со скоростями, отличающимися от скоростей колес с другой стороны транспортного средства. Для гусеничных транспортных средств требуются большие различия в движущей силе между двумя гусеничными полотнами - большими тормозными усилиями на внутреннем гусеничном полотне и большими движущими усилиями на внешнем гусеничном полотне. Это приводит к затратам очень больших механических энергий на отдельные ведущие колеса гусеничных полотен, особенно когда транспортное средство совершает пробег со скоростями от средних до высоких. Эти большие энергии поддерживаются в современном традиционно приводимом гусеничном транспортном средстве посредством использования регенерации механической энергии. Для управления относительными скоростями гусеничных полотен и передачи энергии, расходуемой на торможение, от внутреннего гусеничного полотна к внешнему гусеничному полотну для поддержания поворота используются дифференциальные передачи и поперечные валы. Аналогичные соображения применимы к колесным транспортным средствам с управляемым скольжением.
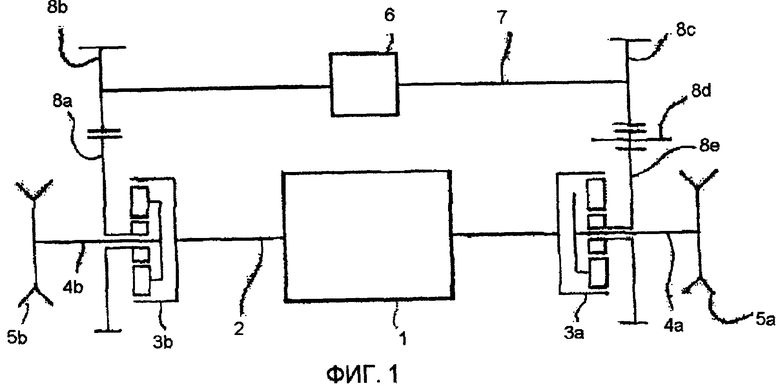
Для множества устройств электрических приводов гусеничных полотен используется отдельный электродвигатель для приведения в действие каждого гусеничного полотна. Это устройство обычно известно как двухмагистральная система. Регенеративной энергией, затрачиваемой на управление, в такой системе требуется манипулировать с помощью электричества, что приводит к необходимости использования двигателей и силовых преобразователей с завышенными размерами. (Например, механическая энергия, измеряемая на ведущем колесе внешнего гусеничного полотна основного боевого танка, при развороте на скорости от средней до высокой может быть порядка 2500 кВт, тогда как мощность двигателя составляет только приблизительно 1000 кВт). В альтернативном подходе используется такое же механическое регенеративное устройство, как в обычной трансмиссии, объединенной с электрическим приводом. Это устройство иногда упоминается как система электрического привода с поперечным валом и иллюстрируется на фиг.1. В патенте США №4998591 раскрыта система электрического привода такой компоновки.
В этом устройстве поперечный вал рулевого управления проходит поперек транспортного средства снаружи двигателя приведения в движение. Это увеличивает размер сборки и требует ряда промежуточных шестерен. Если нужно использовать переключение передач, поперечный вал приведения в движение должен быть отделен от вала двигателя. Этого можно добиться, выполняя вал двигателя полым и проводя сквозь него поперечный вал. Однако это увеличивает диаметр подшипников двигателя, из-за чего трудно достигнуть высокую частоту вращения двигателя, требуемую для хорошей удельной мощности. Поперечный вал приведения в движение можно устанавливать снаружи от двигателя или двигатель устанавливать снаружи от поперечного вала приведения в движение, увеличивая размер узла и добавляя потребность в промежуточных шестернях, что увеличивает сложность и снижает КПД (коэффициент полезного действия).
В патенте США № 4998591 также раскрыта конфигурация привода, в которой используется единственный дифференциал, установленный по центру и приводимый единственным двигателем приведения в движение. Дифференциал идентичен единственному дифференциалу в обычной оси колесного автомобиля или грузовика. Вращающий момент от приводного двигателя делится поровну между двумя полуосями, которые могут вращаться с разным числом оборотов относительно друг друга. На каждой полуоси установлен двигатель рулевого управления. Для управления транспортным средством внутренний двигатель рулевого управления должен действовать как тормоз, а внешний двигатель рулевого управления должен прикладывать дополнительный крутящий момент на ведущем валу для образования требуемой большой разности движущей силы между гусеничными полотнами транспортного средства, чтобы заставить транспортное средство управлять скольжением. Поскольку два двигателя рулевого управления работают с числом оборотов полуосей и манипулируют большим вращающим моментом, когда транспортное средство разворачивается, они работают с большой мощностью, одной регенерирующей и одной приводящей в действие. Поэтому система не является механически регенерирующей системой и имеет такие же недостатки, как двухмагистральная система, в которой требуются двигатели с завышенными размерами.
Патент США № 5168946 раскрывает конфигурацию привода, подобную обычной коробке передач танка, но в которой не используется поперечный вал рулевого управления. В раскрытом устройстве используются три двигателя и тормоз. Для работы на низкой скорости применяется тормоз, а центральный двигатель выключается. Тогда транспортное средство приводится в движение как двухмагистральная система на низких скоростях. На более высоких скоростях тормоз отпускается, а центральный двигатель приводит в движение, увеличивая диапазон скоростей и вводя механическое регенеративное рулевое управление через вал центрального двигателя. Чтобы такая система работала, как описано в том документе, внешним двум двигателям требуется большой вращающий момент и номинальные мощности, дающие небольшое преимущество над чисто двухмагистральной системой, как было описано предварительно.
В патенте США № 2730182 описано устройство управляемого дифференциала. Французский патент FR 2382362 описывает действие управляемого дифференциала, но не раскрывает практический вариант осуществления такого устройства.
Управляемый дифференциал имеет характеристики, заключающиеся в том, что он сцепляет две полуоси и управляет их относительными скоростями. Когда двигатель рулевого управления стационарен, эти две полуоси просто соединены управляемым дифференциалом так, что они должны работать с одной и той же скоростью. Когда двигатель рулевого управления вращается в одном направлении, одна полуось принуждается работать быстрее, чем другая. Когда двигатель рулевого управления вращается в другом направлении, другая полуось принуждается работать быстрее, чем первая. Действие двигателя рулевого управления, с какой бы скоростью транспортное средство ни перемещалось, заставит поэтому транспортное средство разворачиваться с мощностями рулевого управления, регенерируемыми по транспортному средству посредством вращающего момента, производимого в поперечных валах, который поддерживает высокую разность движущей силы гусеничных полотен между внутренним и внешним гусеничными полотнами.
В патенте США № 2730182 описано устройство, в котором используются две половины длинных шестерен, зацепляющиеся друг с другом и установленные на общем крепежном элементе, каждая из которых находится в зацеплении с кольцеобразной шестерней. Каждая кольцеобразная шестерня соединена с конической шестерней, которая соединяется с двумя полуосями. Двигатель рулевого управления действует через червячный винт и колесо на крепежном элементе для двух длинных шестерен. Из-за использования конических шестерен и конфигурации для двух длинных зацепляющихся шестерен такое устройство должно быть большим и тяжелым для механизма большой мощности.
Описанные выше устройства обладают различными недостатками, включающими в некоторых случаях необходимость в двигателях завышенного номинала для достижения рулевого управления, сложных механических устройствах, требующих множества поперечных валов и промежуточных шестерен, и/или сложных конфигурациях двигателей, включающих полые валы.
Настоящее изобретение обеспечивает новую конструкцию привода, которая решает, по меньшей мере, некоторые из проблем, дописанных для известного уровня техники.
В соответствии с настоящим изобретением предложен привод для транспортного средства с управляемым скольжением, содержащий пару деталей привода для сцепления с гусеничными полотнами или колесами транспортного средства с управляемым скольжением, по меньшей мере, один двигатель приведения в движение, имеющий единственный сквозной вал двигателя, несущий ротор двигателя и выступающий с концов двигателя, где первый конец вала двигателя подсоединен к одной из пары деталей привода, а второй конец вала двигателя подсоединен к устройству управляемого дифференциала, и двигатель рулевого управления, находящийся в приводной связи с устройством управляемого дифференциала, причем двигатель рулевого управления выполнен с возможностью управления от нулевой скорости для придания прямолинейного движения на одной или более различных скоростях в любом или обоих направлениях вращения, обеспечивая возможность рулевого управления транспортным средством, по меньшей мере, в одном направлении.
Второй двигатель приведения в движение предпочтительно установлен с другой стороны транспортного средства между управляемым дифференциалом и второй деталью привода гусеничного полотна. В качестве альтернативы, устройство может содержать единственный двигатель приведения в движение, а второй двигатель может быть заменен обыкновенным валом или соединительной муфтой между управляемым дифференциалом и второй деталью привода.
Система трансмиссии также предпочтительно используется с каждой стороны транспортного средства между внешним концом каждого вала двигателя и деталью привода, состоящей изо всех или любой комбинации тормоза редукторов и переключения или переключений передач.
По желанию, конструкция привода может включать в себя связь для соединения вместе переключения передач и для торможения в системе трансмиссии с любой стороны транспортного средства. Квалифицированным специалистам, без сомнения, могут встречаться различные подходящие формы связи. Связи могут быть механическими; электрическими (например, там, где используется электрический привод, чтобы производить переключения передач) или гидравлическими (например, когда используется гидравлический привод для осуществления переключения передач), или иметь любую другую подходящую форму. Обеспечение соответствующей связи позволяет производить одновременно переключение передач и/или торможение с двух сторон системы трансмиссии и, таким образом, обеспечивает лучший контроль при рулевом управлении транспортным средством.
Устройство управляемого дифференциала предпочтительно содержит две эпициклические зубчатые передачи. В предпочтительном варианте опоры планетарных шестерен двух эпициклических зубчатых передач обычно соединены валом, проходящим через две центральные шестерни. Двигатель рулевого управления действует на две центральные шестерни либо через два набора цилиндрических прямозубых шестерен короткого поперечного вала и промежуточные шестерни заднего хода, либо посредством использования конических шестерен. Каждый из двух выходных валов устройства управляемого дифференциала, в этом случае соединенного с валами двигателя приведения в движение, подсоединен к шестерням с внутренним зацеплением эпициклических зубчатых передач. Это устройство снижает до минимума нагрузки на соединения между двигателем рулевого управления и эпициклической зубчатой передачей, но увеличивает скорость планетарных шестерен. Поэтому для охлаждения и смазки может быть желательно рассмотреть другие возможные устройства, перечисленные ниже.
В дополнительном возможном варианте устройства выходные валы подсоединены к шестерням с внутренним зацеплением, двигатель рулевого управления действует на опоры планетарных шестерен, а центральные шестерни являются общими.
В еще одном дополнительном возможном варианте устройства выходные валы подсоединены к центральным шестерням, шестерни с внутренним зацеплением являются общими, а двигатель рулевого управления действует на опоры планетарных шестерен.
В другом дополнительном возможном варианте устройства валы двигателя подсоединены к центральным шестерням, две опоры планетарных шестерен являются общими, а двигатель рулевого управления действует на шестерни с внутренним зацеплением.
В еще одном дополнительном возможном варианте устройства выходные валы подсоединены к опорам планетарных шестерен, центральные шестерни являются общими, а двигатель рулевого управления действует на шестерни с внутренним зацеплением.
В дополнительном возможном варианте устройства выходные валы подсоединены к опорам планетарных шестерен, шестерни с внутренним зацеплением являются общими, а двигатель рулевого управления действует на центральные шестерни.
Специалистам в данной области техники, без сомнения, будут очевидны другие возможные устройства, не выходя при этом за пределы заявленного объема изобретения, как определено в соответствии с прилагаемой формулой изобретения.
В одном варианте осуществления новая конструкция привода содержит два отдельных двигателя приведения в движение, редукторы, тормоза и блоки переключения передач, каждый из которых обычно приводит в движение одно гусеничное полотно или колесо, как в двухмагистральной системе. Блок рулевого управления управляемого дифференциала установлен между двумя двигателями приведения в движение. Двигатель рулевого управления, действующий на управляемый дифференциал, управляет затем относительной скоростью двух двигателей приведения в движение и, таким образом, относительными скоростями двух гусеничных полотен или колес, накладывая функцию рулевого управления. Валы двигателя действуют как поперечный вал приведения в движение и передают регенеративную энергию рулевого управления.
Это устройство сильно упрощает конструкцию двигателей по сравнению с системой, в которой используется трубчатый вал двигателя. Зубчатую передачу, тормоз и главную передачу, все легко устанавливать по оси без необходимости пригонки для вхождения внутрь отрезка поперечного вала. Всю трансмиссию, включая редукторы, переключения передач и тормоза, можно установить в цилиндре с диаметром двигателей приведения в движение, проходящем на ширину корпуса, за исключением относительно небольшого двигателя рулевого управления, что значительно снижает объем, занимаемый в транспортном средстве системой приводов.
Альтернативный вариант осуществления может содержать единственный двигатель приведения в движение. В этом варианте осуществления для прямолинейного прохождения половину энергии можно передавать через дифференциалы рулевого управления с потерей КПД. По причинам размещения требуются двигатели небольшого диаметра. Два двигателя небольшого диаметра являются предпочтительными по сравнению с одним длинным двигателем небольшого диаметра, но оба варианта приемлемы в конфигурации привода по изобретению.
Двигатели приведения в движение и рулевого управления предпочтительно являются электрическими, но один или оба факультативно могут содержать отличающийся тип двигателя, например гидравлический двигатель.
Особенность этого устройства привода заключается в использовании блока рулевого управления управляемого дифференциала, который вызывает передачу регенеративных мощностей рулевого управления прямо через валы двигателя, исключая необходимость в отдельном поперечном вале рулевого управления и значительно упрощая размещение и конструкцию других компонентов.
В целях иллюстрации некоторые варианты осуществления изобретения ниже будут описаны со ссылкой на следующие чертежи, на которых изображено:
фиг.1 - привод известного уровня техники;
фиг.2 - первая конструкция управляемого дифференциала, подходящая для использования в варианте осуществления изобретения;
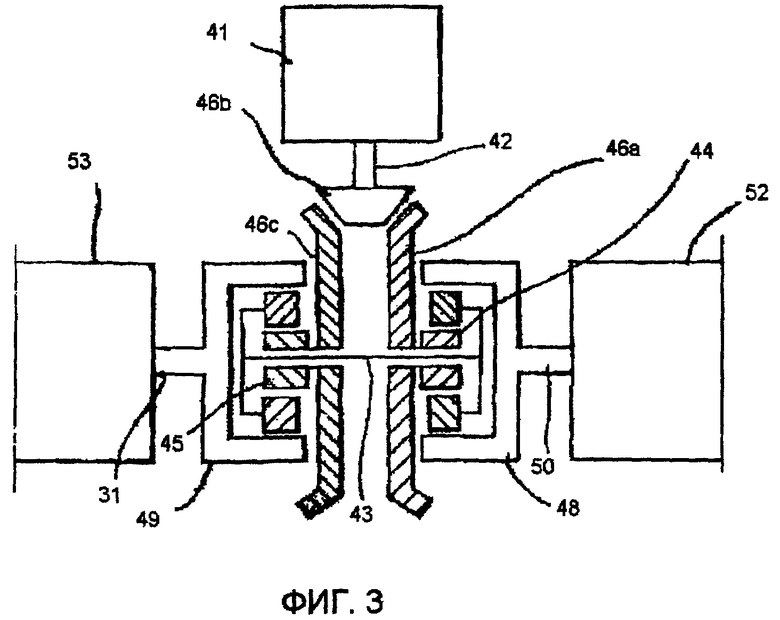
фиг.3 - вторая конструкция управляемого дифференциала, подходящая для использования в варианте осуществления изобретения;
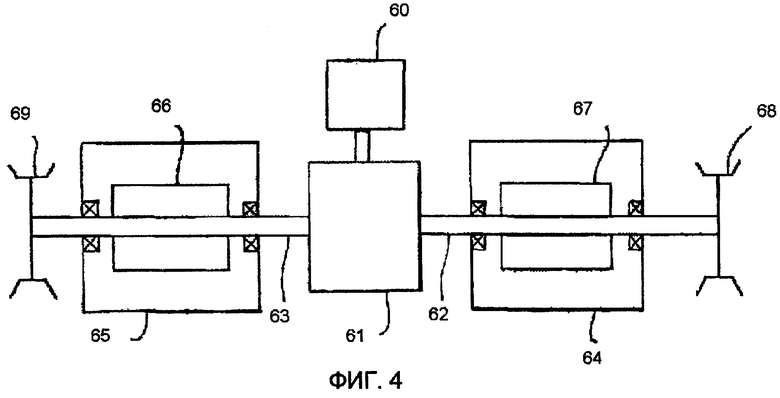
фиг.4 - упрощенный вариант осуществления привода для гусеничного транспортного средства в соответствии с изобретением;
фиг.5 - дополнительный вариант осуществления привода для гусеничного транспортного средства в соответствии с изобретением;
фиг.6 и 7 - схематические виды приводов для колесных транспортных средств в соответствии с изобретением.
Как изображено на фиг.1, привод известного уровня техники содержит двигатель (1) приведения в движение, расположенный на поперечном валу (2), который подсоединен к шестерням с внутренним зацеплением двух эпициклических дифференциалов (3а, 3b) рулевого управления. Опоры планетарных шестерен двух эпициклических дифференциалов рулевого управления соединены с выходными валами (4а и 4b) и ведущими колесами (5а и 5b) гусеничных полотен. Двигатель (6) рулевого управления установлен на поперечном валу (7) рулевого управления. Поперечный вал рулевого управления подсоединен к центральным шестерням эпициклических дифференциалов рулевого управления с помощью ряда цилиндрических прямозубых шестерен (8а, 8b, 8с, 8d и 8е). Дополнительная цилиндрическая прямозубая шестерня (8d) используется с одной стороны, чтобы реверсировать вращение центральной шестерни. Эта компоновка идентична компоновке, используемой в обычной трансмиссии танка с механическим приводом, двигатель приведения в движение установлен вместо узла изменения диапазона передаточных чисел трансмиссии, а гидравлический двигатель рулевого управления заменен электродвигателем. Это представляет собой базис электрического привода, показанного в патенте США № 4998591.
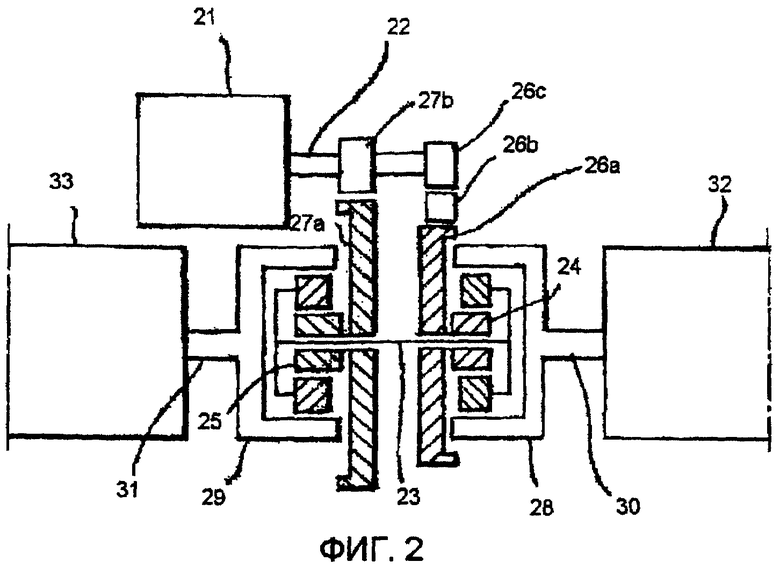
Как показано на фиг.2, предпочтительное устройство управляемого дифференциала содержит двигатель (21) рулевого управления, установленный на поперечном валу (22). Пара эпициклических зубчатых передач выполнена так, что две опоры планетарных шестерен соединены валом (23), который проходит через центр двух центральных шестерен (24 и 25). Центральные шестерни (24, 25), в свою очередь, подсоединены с помощью цилиндрических прямозубых шестерен (26а, 26b, 26с, 27а, 27b) к валу рулевого управления. Промежуточная шестерня (26b) используется с одной стороны, чтобы реверсировать направление вращения центральной шестерни. Две шестерни (28, 29) с внутренним зацеплением эпициклических зубчатых передач подсоединены к выходным валам (30, 31) управляемого дифференциала и показаны связанными с двумя двигателями (32, 33) приведения в движение.
Как показано на фиг.3, второе устройство управляемого дифференциала содержит двигатель (41) рулевого управления, включающий в себя выходной вал (42). Пара эпициклических зубчатых передач выполнена так, что две опоры планетарных шестерен соединены валом (43), который проходит через центр двух центральных шестерен (44 и 45). Центральные шестерни (44, 45), в свою очередь, подсоединены с помощью конических шестерен (46а, 46b, 46с) к выходному валу двигателя рулевого управления. Две шестерни (48, 49) с внутренним зацеплением эпициклических зубчатых передач подсоединены к выходным валам (50, 51) управляемого дифференциала и показаны связанными с двумя двигателями (52, 53) приведения в движение.
На фиг.4 изображен, в общем, привод для гусеничного транспортного средства в соответствии с изобретением. Устройство содержит двигатель (60) рулевого управления в приводной связи с управляемым дифференциалом (61). Управляемый дифференциал (61) соединяет два вала (62, 63) двигателей двух двигателей (64 и 65) приведения в движение. Роторы (67, 66) двух двигателей установлены на валах (62, 63) двигателей. На внешних концах каждого вала двигателя установлено ведущее колесо (68, 69) гусеничного полотна.
На фиг.5 изображен дополнительный вариант осуществления изобретения для гусеничного транспортного средства. Двигатель (71) рулевого управления подсоединен к управляемому дифференциалу (72). Выход управляемого дифференциала соединен с двумя двигателями (74а, 74b) приведения в движение валами (73а, 73b) двигателей. Между внешними концами валов (73а, 73b) двигателей и ведущими колесами (78а, 78b) гусеничного полотна смонтирован ряд компонентов трансмиссии, включая блоки (75а, 75b) редуктора и переключения передач, тормоза (76а, 76b) и редукторы (77а, 77b) главной передачи.
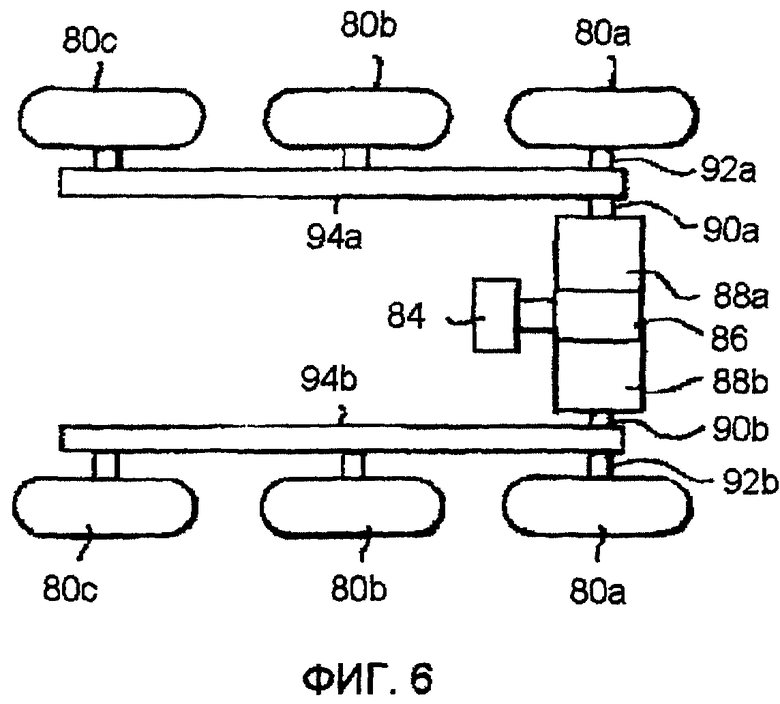
Вариант осуществления, иллюстрируемый на фиг.6, предназначен для колесного транспортного средства с управляемым скольжением. Этот вариант осуществления содержит три пары колес (80а), (80b) и (80с), разнесенных на расстояние по длине корпуса транспортного средства. Двигатель (84) рулевого управления подсоединен к управляемому дифференциалу (86), как было описано предварительно, а выход управляемого дифференциала (86) соединен с двумя двигателями (88а), (88b) приведения в движение валами (90а), (90b). Между концами внешних концов валов (90а), (90b) и ведущих валов (92а), (92b) каждого колеса из пары (80а) установлен блок (94а), (94b) трансмиссии. Блоки трансмиссии соединяют каждое из колес с одной стороны корпуса.
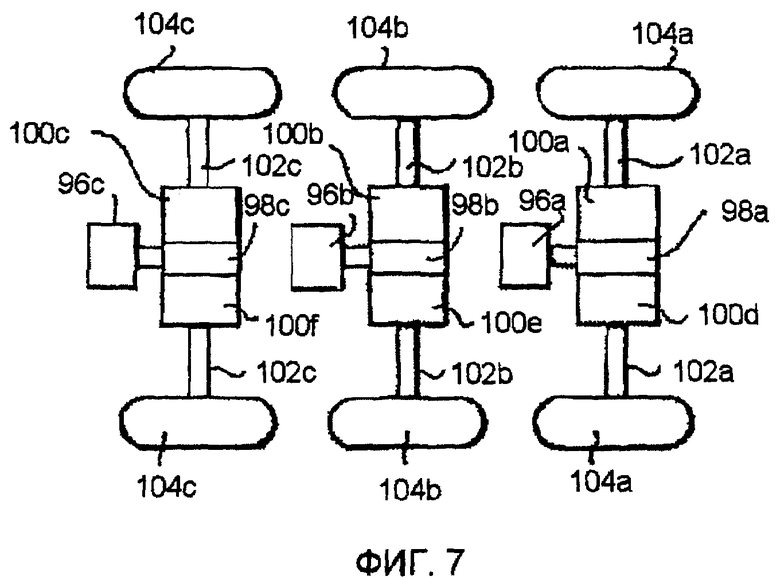
Вариант осуществления, иллюстрируемый на фиг.7, аналогичен показанному на фиг.6, за исключением того, что обеспечены три двигателя (96а), (96b), (96с) рулевого управления и управляемых дифференциалов (98а), (98b) и (98с), где каждый дифференциал связан с двигателями (100a), (100b), (100с), (100d), (100e) и (100f) приведения в движение, соединенными с парами валов (102а), (102b), (102с), к которым присоединены колесные пары (104а), (104b), (104с).
Варианты осуществления изобретения разделяют общую особенность управляемого дифференциала, выполненного так, чтобы вызывать передачу регенеративных мощностей рулевого управления через валы двигателя приведения в движение, таким образом исключая необходимость в дополнительных поперечных валах и значительно упрощая размещение и конструкцию других компонентов в системе. Новые устройства занимают меньшее пространство, чем конфигурации известного уровня техники, и как ожидается, механически будут более эффективными.
Специалистам в данной области техники, без сомнения, будут очевидны другие варианты осуществления изобретения, не выходя за пределы заявленного объема изобретения, как определено в соответствии с прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕДАЧ И ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2236356C2 |
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2000 |
|
RU2191303C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2532039C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ДВУМЯ И БОЛЕЕ ДИАПАЗОНАМИ | 1995 |
|
RU2148503C1 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| МОТОРНО-ТРАНСМИССИОННЫЙ МОДУЛЬ | 2011 |
|
RU2478045C1 |
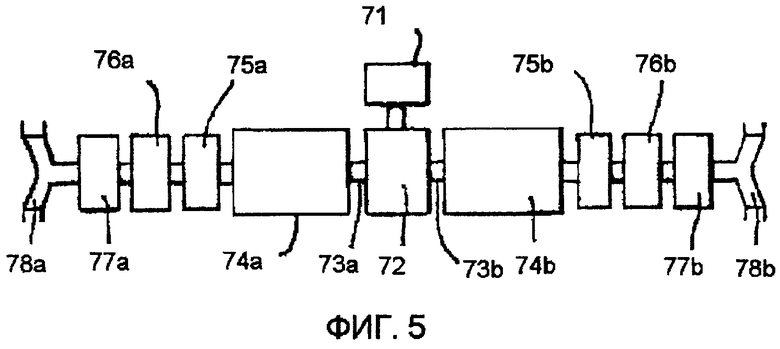
Изобретение относится к приводам для транспортных средств с управляемым скольжением. Сущность изобретения заключается в том, что привод для транспортного средства с управляемым скольжением содержит пару деталей привода для сцепления с парой гусеничных полотен или колес транспортного средства с управляемым скольжением, по меньшей мере, один двигатель (74а, 74b) приведения в движение, имеющий единственный сквозной вал (73а, 73b) двигателя, несущий ротор двигателя и выступающий с концов двигателя. Первый конец вала (73а, 73b) двигателя подсоединен к одной из пары деталей привода. Второй конец вала (73а, 73b) двигателя подсоединен к устройству (72) управляемого дифференциала. Привод также содержит двигатель (71) рулевого управления, находящийся в приводной связи с устройством (72) управляемого дифференциала. Двигатель (71) рулевого управления выполнен с возможностью осуществления управления от нулевой скорости для придания прямолинейного движения до одной или более разных скоростей в любом или обоих направлениях вращения, обеспечивая возможность рулевого управления транспортным средством, по меньшей мере, в одном направлении. Техническим результатом является упрощение конструкции и повышение кпд. 2 с. и 17 з.п. ф-лы, 7 ил.
| US 6017289 А, 25.01.2000 | |||
| US 5851162 А, 22.12.1998 | |||
| Система управления поворотом гусеничной машины | 1991 |
|
SU1813669A1 |

