Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, полугусеничных тягачах и транспортерах.
Известна самоходная машина, содержащая двигатель, соединенный через коробку передач и раздаточную коробку с механизмом поворота, выполненным в виде двойного дифференциала, фрикционного вариатора, связанного со второй полуосевой шестерней дифференциала, соединенного с рулевым колесом, и маломоментного фрикциона на водиле дифференциала [Авторское свидетельство СССР №1311954, МПК В 60 К 41/28, 1987].
Недостатком данной конструкции являются большие потери мощности в тормозных фрикционах при повороте, относительно малый КПД вследствие большого скольжения между дисками вариатора, узкий диапазон регулирования радиусов поворота из-за малого диапазона изменения передаточных чисел дискового фрикционного вариатора. Кроме того, практически постоянная работа фрикционов при движении по местности приводит к преждевременному выходу из строя данных механизмов и снижению надежности конструкции; а импульсный режим поддержания заданной кривизны траектории движения приводит к дополнительным нагрузкам на элементы трансмиссии.
Наиболее близким техническим решением, выбранным в качестве прототипа, является самоходная машина, содержащая гидрообъемный механизм поворота (ГОМП), через который при повороте машины часть потока мощности от тягового двигателя передается на солнечные шестерни левого и правого суммирующих планетарных рядов (СПР), водилы которых связаны с ведущими колесами гусеничного движителя, а эпициклические шестерни имеют привод от выходного вала коробки передач, реализуя передачу другой части потока мощности от тягового двигателя к ведущим колесам, обеспечивая прямолинейное движение машины [Гусеничная машина ГМ-569 и ее модификации. Техническое описание и инструкция по эксплуатации (ТО), М.: Военное издательство, 1985, с.28, 201].
Недостатком данной конструкции является то, что при использовании комбинированного (например, колесно-гусеничного) движителя ухудшается управляемость машины, поскольку не обеспечивается кинематически согласованная работа различных элементов движителя при их одновременном использовании при движении по криволинейной траектории.
Технический результат изобретения направлен на улучшение управляемости машины с комбинированным движителем за счет совместной реализации колесной и гусеничной схем поворота, снижение потерь мощности при одновременном использовании колесного и гусеничного движителей в повороте, а также повышение точности регулирования поворота за счет вовлечения гусеничного движителя в процесс формирования поворачивающих усилий.
Технический результат достигается тем, что самоходная машина с комбинированным движителем, содержащая двигатель, связанный через коробку передач и раздаточную коробку с колесным и гусеничным движителями, оснащена рулевым управлением, обеспечивающим с помощью системы тяг и рычагов оппозитный поворот управляемых колес, при этом привод гусеничного движителя дополнительно снабжен гидрообъемным механизмом поворота, включающим в себя регулируемый гидронасос (ГН), гидромотор (ГМ), связанный с солнечными шестернями левого и правого суммирующих планетарных рядов (СПР), причем устройство регулирования подачи ГН имеет кинематическую связь с тягой рулевого привода управляемых колес.
Отличительными признаками от прототипа является то, что привод гусеничного движителя дополнительно снабжен гидрообъемным механизмом поворота, включающим в себя регулируемый гидронасос (ГН), гидромотор (ГМ), связанный с солнечными шестернями левого и правого суммирующих планетарных рядов (СПР), причем устройство регулирования подачи ГН имеет кинематическую связь с тягой рулевого привода управляемых колес.
На чертеже представлена принципиальная схема рулевого управления машины с комбинированным движителем.
Рулевое управление машины с комбинированным (колесно-гусеничным) движителем включает рулевое колесо 1 с рулевой колонкой, рулевой механизм 2, соединенный через сошку рулевого привода 3 с продольной рулевой тягой 4, управляющей перемещением поперечных рулевых тяг 5 и 6, внутри которых установлены корпусы золотников распределительных устройств 7 и 8, соединенные трубопроводами 9 и 10 с насосом 11, закачивающим рабочую жидкость из бака 12. Золотники 7 и 8, в зависимости от своего положения, управляют потоком жидкости, направляя его в ту или иную полость силовых цилиндров 13 и 14, штоки которых через рычаги 15 соединены с управляемыми колесами и с поперечными тягами передней 16 и задней 17 рулевых трапеций. В то же время продольная рулевая тяга 4 кинематически связана с люлькой 18 механизма управления подачей гидронасоса 19, входной вал которого приводится во вращение от шестерни 20, установленной на выходном валу 21 раздаточной коробки, на которую крутящий момент поступает от тягового двигателя 22 через коробку передач 23.
Гидронасос 19, питаемый от магистрали 10, гидравлически связан с нерегулируемым гидромотором 24, выходной вал которого, через угловой редуктор 25, соединен с валами 26 привода солнечных шестерен левого и правого суммирующих планетарных рядов 27. Эпициклические шестерни суммирующих планетарных рядов 27 через валы 28 соединены с полуосевыми шестернями двойного конического дифференциала 29, корпус которого связан с выходным валом раздаточной коробки 21. Водила суммирующих планетарных рядов 27 через бортовые передачи 30 обеспечивают передачу крутящего момента на ведущие колеса 31 гусеничного движителя.
Рулевое управление машины с комбинированным (колесно-гусеничным) движителем работает следующим образом. В нейтральном положении рулевого колеса, соответствующем прямолинейному движению машины, крутящий момент от тягового двигателя через коробку передач, раздаточную коробку поступает на корпус дифференциала 29, обеспечивая вращение валов 28 привода эпициклических шестерен суммирующих планетарных рядов 27 левого и правого бортов с одинаковой скоростью. В то же время крутящий момент от раздаточной коробки через шестерню 20 передается на входной вал гидронасоса 19, производительность которого регулируется положением рейки механизма управления люлечного типа 18 и при прямолинейном движении является нулевой. Вследствие этого выходной вал гидромотора 24 и связанные с ним через угловой редуктор 25 солнечные шестерни суммирующих планетарных рядов 27 заторможены. Крутящий момент с эпициклических шестерен суммирующих планетарных рядов 27 передается на водила и через бортовые передачи 30 на ведущие колеса 31 гусеничного движителя. Таким образом, при нейтральном положении рулевого колеса мощность от тягового двигателя к ведущим колесам гусеничного движителя передается одним потоком мощности, обеспечивая прямолинейное движение машины.
При воздействии водителя на рулевое колесо 1 рулевой механизм 2 через сошку рулевого привода 3 вызывает смещение поперечных рулевых тяг 5 и 6 соответственно передней и задней управляемых осей с установленными в них корпусами золотников 7 и 8. При этом золотники, смещаясь в осевом направлении, обеспечивают подачу рабочей жидкости из бака 12 через насос 11 в те или иные полости гидравлических силовых цилиндров 13 и 14, что приводит к повороту управляемых колес.
В то же время перемещение продольной тяги 4 рулевого привода через рейку механизма управления вызывает изменение положения (наклон) люльки гидронасоса 19, изменяя при этом его производительность. В результате изменения рабочего объема жидкости в аксиальных поршнях гидронасоса начинается вращение выходного вала гидромотора 24. Крутящий момент от гидромотора 24 передается через конический угловой редуктор 25 к валам 26, обеспечивая при этом их разностороннее вращение с одинаковой угловой скоростью. В результате солнечные шестерни суммирующих планетарных рядов 27 начинают вращение в разные стороны, посредством чего водила суммирующих планетарных рядов 27 и связанные с ними через бортовые передачи 30 ведущие колеса гусеничного движителя 31 вращаются с различными угловыми скоростями, разница значений которых пропорциональна углам поворота управляемых колес.
Таким образом, обеспечивается согласованный поворот машины с комбинированным движителем при одновременном использовании колесного и гусеничного движителей за счет совместной реализации колесной и бортовой схем поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2109650C1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМОЙ ВЕЛИЧИНОЙ КИНЕМАТИЧЕСКОГО РАССОГЛАСОВАНИЯ | 2002 |
|
RU2291064C2 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1527072A1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| СИЛОВОЙ БЛОК ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ | 2002 |
|
RU2261815C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2258623C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2031808C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в тракторах, самоходных машинах, полугусеничных тягачах и транспортерах. Самоходная машина с комбинированным движителем содержит двигатель, связанный через коробку передач и раздаточную коробку с колесным и гусеничным движителями, рулевое управление, обеспечивающее с помощью системы тяг и рычагов оппозитный поворот управляемых колес. Привод гусеничного движителя дополнительно снабжен гидрообъемным механизмом поворота, включающим в себя регулируемый гидронасос (ГН), гидромотор, связанный с солнечными шестернями левого и правого суммирующих планетарных рядов. Устройство регулирования подачи ГН имеет кинематическую связь с тягой рулевого привода управляемых колес. Достигается улучшение управляемости машины с комбинированным движителем за счет совместной реализации колесной и гусеничной схем поворота, снижение потерь мощности при одновременном использовании колесного и гусеничного движителей в повороте, а также повышение точности регулирования поворота за счет вовлечения гусеничного движителя в процесс формирования поворачивающих усилий. 1 ил.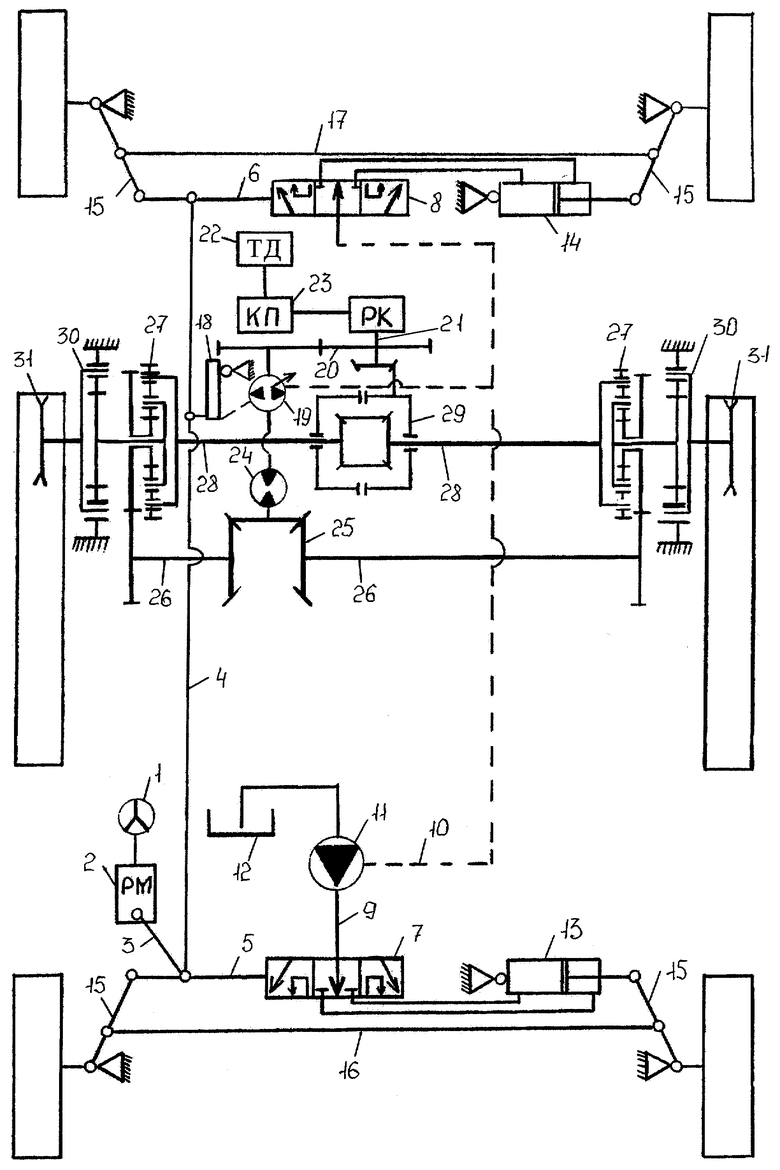
Самоходная машина с комбинированным движителем, содержащая двигатель, связанный через коробку передач и раздаточную коробку с колесным и гусеничным движителями, отличающаяся тем, что привод гусеничного движителя дополнительно снабжен гидрообъемным механизмом поворота, включающим в себя регулируемый гидронасос (ГН), гидромотор (ГМ), связанный с солнечными шестернями левого и правого суммирующих планетарных рядов (СПР), причем устройство регулирования подачи ГН имеет кинематическую связь с тягой рулевого привода управляемых колес.
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2007323C1 |
| US 6167982 B1, 02.01.2001 | |||
| СПОСОБ РЕКОНСТРУКЦИИ НАДПЛЕЧЬЯ ПРИ ЕГО ДЕФОРМАЦИИ | 2006 |
|
RU2332182C1 |

