Изобретение относится к области машиностроения, может быть использовано в ручных электродистанционных системах управления подвижными наземными, авиационными и морскими объектами, и предназначено для формирования электрических сигналов по двум взаимно перпендикулярным направлениям движения объекта.
В связи с тем, что управление современными маневренными объектами осуществляется в условиях воздействия на оператора высоких вибрационных, ударных и линейных перегрузок, зачастую при дефиците времени на принятие решения и реализацию управления возникает необходимость создания специальных органов ручного управления. Одним из направлений конструктивного решения, обеспечивающего качественное управление в тяжелых условиях эксплуатации, являются ручки управления кистевого типа, пространственные оси вращения которых совпадают с осями вращения кисти руки при ее движениях и неподвижном состоянии остальной части руки.
Известны авиационные кистевые трехосевые ручки управления, включающие в себя корпус, рукоятку, жестко закрепленную посредством переходного кронштейна к полукольцу тангажа, установленного на двух полуосях в полукольце крена, которое, в свою очередь, подвижно установлено в полукольце курса и имеет возможность скольжения в нем с помощью направляющего паза. В каждом канале размещены загружатели пружинного типа и электрические датчики положения рукоятки [1,2].
Известна кистевая двухосевая ручка управления, включающая в себя корпус, рукоятку, закрепленную в скобе канала тангажа с возможностью регулировки положения рукоятки. Скоба канала тангажа с помощью оси вращения подвижно установлена на кронштейне канала крена, который, в свою очередь, посредством оси вращения подвижно соединен с корпусом ручки управления. В каждом канале управления установлены загрузочные устройства и электрические датчики положения рукоятки [3].
Известна также ручка управления, у которой карданный узел, обеспечивающий две степени свободы, расположен в центре самой рукоятки. Причем ось вращения рукоятки находится в центре кисти руки оператора, а карданный узел посредством тяг и качалок связан с механизмами загрузки и электрическими датчиками положения, размещенными в основании ручки управления [4].
Наиболее близким к заявляемому устройству по своей технической сущности и конструктивному решению является кистевая ручка управления [3], представленная в патенте США №4069720 от 24.01.78 г., которая была принята авторами в качестве прототипа.
Указанный прототип имеет следующие недостатки.
1. Электрические и механические узлы одного канала управления последовательно установлены на подвижных механических узлах другого канала управления, т.е. электрические датчики с элементами проводки подвижны относительно неподвижного корпуса ручки управления. Это не удовлетворяет требованиям надежности по условиям эксплуатации многих подвижных объектов.
2. Механические узлы каждого канала управления имеют консольное крепление, что существенно понижает прочностные и надежностные требования к конструкции ручки управления при воздействии ударных и вибрационных перегрузок в процессе эксплуатации объекта.
3. Конструкция ручки содержит большое количество механических элементов, что значительно снижает надежность устройства в целом.
Целью данного изобретения является устранение вышеуказанных недостатков, а именно повышение надежности ручки управления путем создания простых кинематических связей между механическими узлами, обеспечивающими устойчивость конструкции ручки к воздействию ударных и вибрационных перегрузок в вертикальной и горизонтальной плоскостях, и формирование электрических сигналов по двум каналам управления посредством простых движений кисти руки при неподвижном состоянии остальной части руки.
Указанная цель достигается тем, что в ручке управления, содержащей корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки, механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде двух дуг, консольно установленных на соответствующих осях вращения. Одна дуга отклоняется относительно вертикальной, а другая - относительно горизонтальной осей. Дуги механически связаны друг с другом посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазу дуги канала азимута. При этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места. Кроме этого, в корпусе устройства по каждому каналу управления установлен демпфер, кинематически связанный с осью вращения соответствующей дуги.
Для обеспечения балансировки подвижных частей ручки управления к кронштейну крепления рукоятки с противоположной от вертикальной оси вращения стороны закреплен балансировочный груз.
Сущность предлагаемого технического решения поясняется чертежами, где представлены
на фиг.1 - конструктивная схема устройства ручного управления;
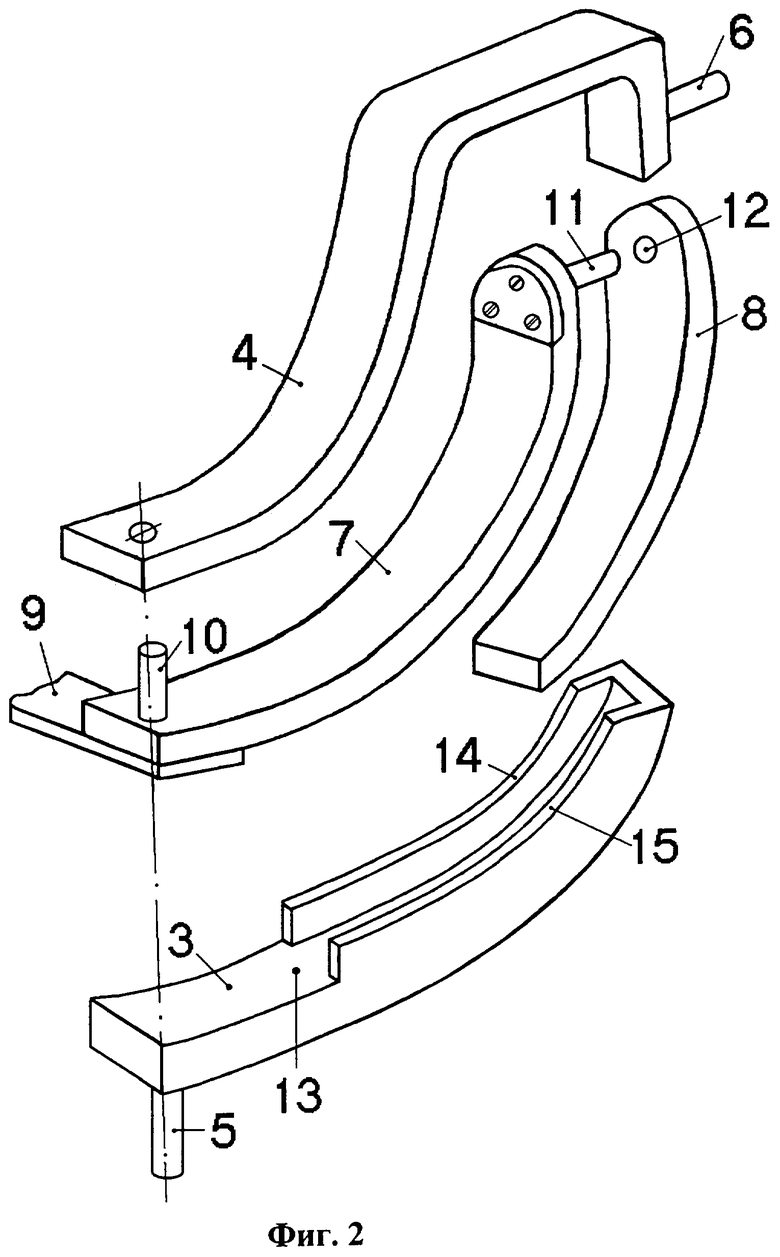
на фиг.2 - механические узлы, обеспечивающие отклонение рукоятки по двум взаимно перпендикулярным направлениям.
Устройство ручного управления (фиг.1 и 2) содержит корпус 1, рукоятку 2, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям. Эти механические узлы включают в себя две дуги 3 и 4, консольно установленные в корпусе 1 на соответствующих осях вращения 5 и 6. Дуга 3 отклоняется относительно вертикальной оси OY по каналу азимута, а дуга 4 - относительно горизонтальной оси OZ по каналу угла места.
Дуги 3 и 4 связаны между собой посредством дугообразной стойки 7 и подвижной скобы 8. К нижнему концу дугообразной стойки жестко закреплен кронштейн 9 рукоятки 2. Кроме того дугообразная стойка 7 подвижно соединена посредством оси 10 с дугой канала угла места 4. Верхний конец стойки 7 шарнирно соединен с подвижной скобой 8 посредством оси 11, входящей в отверстие 12, при этом подвижная скоба 8 соединена с дугой азимута 3 посредством паза 13 с направляющими стенками 14 и 15.
Для обеспечения работоспособности устройства ручного управления выполнено следующее условие: в нейтральном положении рукоятки 2 вертикальная ось вращения 10 дугообразной стойки 7 совпадает с осью вращения 5 дуги канала азимута 3, а горизонтальная ось вращения 11 этой же стойки совпадает с осью вращения 6 дуги канала угла места 4.
Ось 6 дуги канала угла места посредством коромысла 16 кинематически связана с пружинным загружателем 17, электрическим датчиком 18 и демпфером 19.
Аналогично ось 5 дуги канала азимута посредством коромысла 20 кинематически связана с пружинным загружателем 21, электрическим датчиком 22 и демпфером 23.
К кронштейну 9 рукоятки 2 с противоположной от вертикальной оси вращения стороны закреплен посредством своего кронштейна 24 балансировочный груз 25.
Устройство ручного управления (фиг.1 и 2) работает следующим образом. При отклонении рукоятки 2 по каналу угла места (вверх - вниз) дугообразная стойка 7, вращаясь относительно горизонтальной оси 11, отклоняет дугу канала угла места 4, которая в свою очередь посредством оси 6 отклоняет коромысло 16 в соответствующую сторону. При этом начинает работать пружинный загружатель 17 и демпфер 19. Одновременно с этим с помощью электрического датчика 18 формируется управляющий сигнал.
При отпускании рукоятки 2 (снятии с рукоятки усилия) она под действием пружинного загружателя возвращается в исходное (нейтральное) положение, при этом электрический управляющий сигнал равен нулю.
В связи с тем, что в кинематическую цепочку включен (встроен) демпфер, возврат рукоятки в нейтральное положение происходит плавно без перехода нейтрального положения (без перерегулирования).
Работа устройства по каналу азимута происходит аналогичным образом. При отклонении рукоятки 2 "влево - вправо" дугообразная стойка 7, вращаясь относительно вертикальной оси 10, отклоняет посредством подвижной скобы 8 дугу канала азимута 3, которая посредством оси 5 и коромысла 20 включает в работу пружинный загружатель 21, демпфер 23 и электрический датчик 22. При снятии усилий с рукоятки она возвращается в исходное положение.
При одновременном отклонении рукоятки по двум каналам управления дугообразная стойка 7, вращаясь вокруг осей 10 и 11, отклоняет обе дуги 3 и 4. Чтобы обеспечить такое отклонение рукоятки подвижная скоба 8 скользит в направляющем пазу 13 вверх или вниз в зависимости от направления отклонения рукоятки.
Предлагаемая кинематическая взаимосвязь элементов конструкции обеспечивает реализацию основного принципа кистевого управления - пространственные оси вращения рукоятки совпадают с осями вращения кисти руки при неподвижном состоянии остальной части руки.
Представленное техническое решение устройства ручного управления позволяет:
- перераспределить действующие на рукоятку нагрузки на две взаимно перпендикулярные оси ее вращения независимо от того, по какой из осей вращения прикладываются усилия к рукоятке в процессе управления объектом или при действии на нее внешних ударных, вибрационных или линейных перегрузок. Это обеспечивается за счет использования в конструкции устройства дугообразной стойки и подвижной скобы, которые кинематически связывают две дуги по каналам азимута и угла места. Только такое соединение механических элементов позволяет достигнуть вышеуказанного эффекта. Тем самым исключается недостаток консольной конструкции, присущий практически всем конструкциям ручек управления;
- разместить все основные электрические элементы конструкции, пружинные загружатели и демпферы на неподвижном корпусе устройства;
- обеспечить компактное размещение устройства на рабочем месте оператора и удобство работы с рукояткой. Одним из возможных вариантов размещения механических узлов устройства вместе с балансировочным грузом является размещение в подлокотнике, который обеспечивает хороший захват рукоятки кистью руки оператора.
Все вышеприведенные технические решения устройства должны повысить эффективность ручного управления в целом.
На основе материалов данного предложения была разработана конструкторская документация и изготовлен экспериментальный образец устройства. Проведены испытания на исследовательских стендах, получены положительные результаты.
Таким образом, предлагаемое техническое решение устройства ручного управления может быть рекомендовано для использования в электродистанционных системах управления современными подвижными наземными, авиационными и морскими объектами, эксплуатирующимися в условиях воздействия на оператора высоких вибрационных, ударных и линейных перегрузок.
Источники информации
1. Авторское свидетельство СССР №110549 от 10.11.1976 г. "Трехосевая ручка управления летательного аппарата".
2. Патент США №3028126 от 03.04.1962 г. "Трехосевая ручка управления".
3. Патент США №4069720 от 24.01.1978 г. "Двухосевая боковая ручка управления летательного аппарата".
4. Патент США №4012014 от 15.03.1977 г. "Ручка управления самолета".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| Устройство для обучения управлению подвижными объектами с помощью джойстиков | 2019 |
|
RU2724939C1 |
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| БОКОВАЯ КИСТЕВАЯ РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2164878C2 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК И СЛИВА ИЗ НИХ ЖИДКОСТЕЙ | 2008 |
|
RU2375228C1 |
| КОМБИНИРОВАННЫЙ КОМНАТНЫЙ ТРЕНАЖЕР | 1992 |
|
RU2050881C1 |
| Ручной инструмент для резки жести по радиусу, преимущественно консервный нож | 2017 |
|
RU2661158C1 |
Изобретение относится к области машиностроения и может быть использовано в ручных электродистанционных системах управления подвижными наземными, авиационными и морскими объектами. Устройство содержит корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки. Механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде двух дуг, консольно установленных на соответствующих осях вращения. Одна дуга отклоняется относительно вертикальной, а другая - относительно горизонтальной осей. Дуги механически связаны друг с другом посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазу дуги канала азимута. При этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места. К кронштейну рукоятки с противоположной от вертикальной оси вращения стороны закреплен балансировочный груз. Технический результат – повышение надежности ручки управления путем создания простых кинематических связей между механическими узлами. 2 з.п. ф-лы, 2 ил.

| US 4012014, 15.03.1977 | |||
| US 4069720, 24.01.1978 | |||
| US 3028126, 03.04.1962 | |||
| US 3409252, 05.11.1968. |

