Изобретение относится к авиации и предназначено для работы в составе электродистанционной системы управления летательного аппарата (ЛА).
Известна ручка управления, установленная на вертолете фирмы "Камова" (разработки НИИАО), имеющая три оси вращения, две из которых расположены под рукояткой, а третья - вдоль рукоятки, причем по всем осям имеется пружинная несимметричная загрузка, регулируемые демпфирование и зоны нечувствительности.
Кроме того, известна боковая ручка управления самолетом A320/321, которая жестко установлена в кабине на боковой горизонтальной панели. Рядом с ней установлен регулируемый по высоте и угловому положению подлокотник.
Расположение ручки на боковой горизонтальной панели не позволяет использовать это место для установки на нем органов управления бортовым комплексом и системами ЛА, что заставляет размещать их в других менее удобных для летчиках местах кабины.
В силу кинематической схемы ручки, при ее отклонении летчиком вперед-назад и вращении вокруг своей оси, происходит перемещение его локтевого сустава вдоль подлокотника, на который он опирается. В результате этого возникает противодействующая сила трения между локтем и подлокотником, которая зависит от многих факторов, в частности от действующей на самолет нормальной перегрузки и материалов, из которых сделан подлокотник и рукав одежды летчика. Кроме того, если сила трения локтя о подлокотник мала (или рука вообще не лежит на нем), то в силу достаточно большой высоты ручки (т.е. наличия "плеча" приложения инерционной силы относительно оси вращения ручки) тангенциальное ускорение способно вызвать самопроизвольное движение локтя руки вдоль подлокотника, а значит и непроизвольное отклонение ручки от себя - на себя. При возникновении угловых ускорений по крену возникают такие же дополнительные силовые воздействия на руку летчика, которые ухудшают точность дозирования летчиком своих управляющих действий при отклонении ее влево-вправо.
Таким образом при воздействии любых сильных акселерационных воздействий на руку летчика нарушается постоянство связи между мышечным усилием, прикладываемым к ручке летчиком и ее перемещением под действием этого усилия, определяемым загрузочным механизмом ручки. Этот эффект известен как эффект "присоединенной массы" (всей массы руки летчика, держащейся за ручку и таким образом присоединенной к ней). Так как акселерационные воздействия непрерывно изменяются по величине и знаку: как случайным образом (например, при полете в турбулентной атмосфере), так и из-за управляющих действий самого летчика, то он не успевает адаптироваться (т.е. адекватно воздействию инерциальных сил изменять мышечное усилие на ручке). Если не использовать подлокотник, то рассмотренный ранее эффект "присоединенной" к ручке массы руки будет проявляться сильнее.
Следует отметить, что при больших перегрузках порядка 9-12g (характерных для спортивных летательных аппаратов и истребителей) летчик вообще не сможет отклонять ручку управления на полный ход, так как ему может не хватить силы сдвинуть локоть руки вдоль подлокотника. Если локоть руки летчика будет жестко зафиксирован на подлокотнике, то в силу кинематической схемы ручки при ее отклонениях влево-вправо возникнет непроизвольное отклонение ручки на себя, т. е. вредная перекрестная связь между боковым и продольным каналами управления летательного аппарата (при условии, что электродистанционная система управления ЛА разделяет управление в продольном и боковом каналах).
При увеличении угла наклона кресла в кабине (например, для улучшения переносимости летчиком больших нормальных перегрузок и уменьшения высоты кабины ЛА) затрудняется пилотирование ЛА из-за сильно разогнутого локтевого сустава руки.
Все перечисленные ранее недостатки устраняет боковая кистевая ручка с двумя осями, описанная в американском патенте N 4069720 от 24 января 1978 г. Аналогичная ручка с тремя осями описана в американском патенте N 5379663 от 10 января 1995 г.
Однако ручка не имеет регулировки своего положения и углов ориентации в кабине, что при правильной установке положения глаз летчика в кабине путем регулировки положения его кресла может привести к неудобному расположению ручки для летчиков, даже при средних отклонениях их антропометрических показателей. Кроме того, использование в регулируемых сборочных узлах соединения на основе сухого трения значительно снижает прочность ручки, надежность ее функционирования, ухудшает удобство и увеличивает время регулировки ручки летчиком перед полетом. При этом требуются затягивающие инструменты и не исключается самопроизвольное раскручивание резьбовых соединений. Плоский, не профилированный подлокотник не обеспечивает фиксацию локтевого сустава при сильных акселерационных воздействиях на летчика. Ось вращения рукоятки чрезмерно сдвинута вниз относительно пятна контакта локтя руки и подлокотника, что при больших нормальных перегрузках приводит к усложнению управления из-за необходимости перемещения локтя по подлокотнику. В результате, на самых ответственных и опасных этапах полета, когда необходимы максимальные отклонения ручки управления с высокой точностью их дозирования, происходит ухудшение точности пилотирования летательным аппаратом, а при максимальных усилиях летчика на нее (например, в состоянии стресса усилие может достигнуть 120-200 кг) может произойти ее поломка.
Технические результаты от использования изобретения сводятся к улучшению компоновки кабины, повышению комфортности летчика, повышению точности пилотирования ЛА и надежности работы ручки, быстроты и удобства ее регулировки перед полетом.
Указанные технические результаты достигаются тем, что ручка устанавливается на боковой стенке кабины летчика, имеет шлицевые регулировочные сборочные узлы (см. фиг. 2, 3, 4): своего положения (12, 14) и ориентации (13, 16) в кабине, расстояния рукоятки от подлокотника ручки 15 и от своих осей вращения 17, нейтрального положения рукоятки по всем трем осям ее вращения (см.фиг. 1) с помощью стопорных винтов фиксации загрузочных узлов с датчиками 4,6,8 в своих кронштейнах 5,7,9, две из которых (оси загрузочных узлов с датчиками 4 и 7) проходят через сустав кисти руки летчика, а третья (ось загрузочного узла с датчиком 8) - под профилированным подлокотником ручки 10 максимально приближена к пятну контакта локтевого сустава руки летчика с подлокотником.
Возможность крепления ручки к боковой стенке кабины обеспечивает более удобную позу летчика с несколько разведенными локтями, что обеспечивает более комфортные условия при полете в скафандре, зимнем обмундировании, спасательном жилете и т.д. Улучшает компоновку кабины, так как позволяет использовать панель под ручкой для размещения дополнительных индикаторов и органов управления в хорошо видимом и досягаемом для летчика месте.
При отклонении ручки летчиком по всем трем осям и акселерационном воздействии не возникает перемещения локтя руки летчика на профилированном подлокотнике. Следовательно, выбором формы профиля подлокотника и его покрытия можно обеспечить хорошую фиксацию локтевого сустава руки летчика на нем при любых силовых и моментных воздействиях на ЛА. Это позволяет практически полностью исключить влияние эффекта "присоединенной массы" руки, так как "присоединенная" (имеется в виду присоединенная к ручке) масса руки будет равна только массе кисти руки.
Ожидаемое повышение точности дозирования отклонений ручки объясняется тем, что обеспечивается удобное положение руки летчика с учетом его индивидуальных антропоцентрических особенностей и неподвижность локтевого сустава на подлокотнике.
Для пояснения сущности изобретения используются следующие чертежи.
На фиг. 1 представлено изометрическое изображение боковой кистевой ручки управления ЛА, состоящей из следующих деталей:
1 - типовая рукоятка;
2 - регулировочный сборочный узел рукоятки ручки;
3, 5, 7, 9 - кронштейны;
4,6,8 - три загрузочных узла (с размещенными внутри них пружинными загружателями, демпферами и резервированными датчиками угла поворота их осей);
10 - подлокотник ручки;
11 - регулируемые сборочные узлы крепления ручки к стенке кабины летчика.
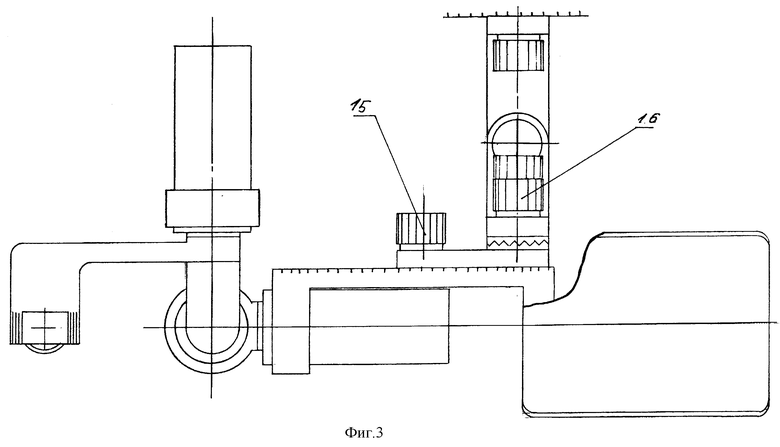
На фиг 2, 3, 4 представлены три проекции кистевой ручки управления ЛА со следующими регулировочными сборочными узлами:
12 - положения ручки в кабине вдоль продольной оси ЛА;
13 - ориентации ручки в кабине вокруг вертикальной оси ЛА;
14 - положения ручки в кабине вдоль вертикальной оси ЛА;
15 - положения рукоятки ручки относительно своего подлокотника;
16 - ориентации ручки в кабине вокруг поперечной оси ЛА;
17 - положения рукоятки ручки относительно своих осей вращения.
Кинематическая схема боковой кистевой ручки состоит из трех взаимно перпендикулярных осей вращения, две из которых проходят через сустав кисти руки летчика, а третья - под профилированным подлокотником ручки максимально приближенная к пятну контакта локтевого сустава руки летчика с подлокотником. Ручка имеет типовую авиационную рукоятку с оперативными органами управления на ней (рукоятка изображена упрощенно, чтобы не отвлекать от сути изобретения).
Рукоятка 1 с помощью своего регулировочного сборочного узла 2 крепится на кронштейн 3, который закреплен на оси загрузочного узла с датчиком 4, получившаяся при этом сборка (1-2-3-4) с помощью кронштейна 5 закреплена на оси узла 6, получившаяся сборка (1-2-3-4-5-6) с помощью кронштейна 7 закреплена на оси загрузочного узла с датчиком 8, сборка (1-2-3-4-5-6-7-8) крепится с помощью кронштейна 9 на подлокотнике 10, который через регулировочные сборочные узлы 11 крепится к боковой стенке кабины ЛА. Загрузочные узлы с датчиками 4, 6, 8 фиксируются в кронштейнах 5, 7, 9 подпружиненными стопорными винтами с нарезными головками.
Летчик при лежащем на подлокотнике локтевом суставе руки, изгибая кисть руки вверх-вниз, поворачивает кронштейн 3, изгибая влево-вправо поворачивает кронштейн 5, при этом поворачиваются оси в загрузочных узлах с датчиками 4 и 6, поворачивая кисть вместе с локтевым суставом практически вокруг его пятна контакта с подлокотником 10, летчик тем самым поворачивает кронштейн 7 на оси загрузочного узла с датчиком 8. В результате электрические сигналы, пропорциональные углам поворота осей в узлах 4, 6, 8, с находящихся в них 3 - 4-кратно резервированных датчиков поступают в электродистанционную систему управления ЛА.
Регулировочные сборочные узлы (см. фиг. 2, 3, 4) выполнены в виде подпружиненных шлицевых соединений, что исключает их самопроизвольное раскручивание, обеспечивает удобство и быстроту регулировки одной рукой. После ослабления болтов сборки и "прощелкивания по шлицам" до желаемого положения всей ручки и ее рукоятки, они жестко фиксируются закручиванием болтов с нарезными головками без особых усилий и дополнительных инструментов, чем обеспечивается повышенная прочность, жесткость и надежность соединения. Необходимая точность регулировки обеспечивается выбором достаточно мелкого шага шлицов. Перед полетом летчик устанавливает удобное для себя положение ручки в кабине с помощью последовательной регулировки узлов 14 и 12 (вдоль вертикальной и продольной осей ЛА), а затем с помощью узлов 13 и 16 ее ориентацию (вокруг вертикальной и поперечной осей ЛА). После этого, подгоняя ручку под размеры своего локтя и кисти руки, регулируют узлы 15 и 17. Регулировка нейтрального положения рукоятки по всем трем осям осуществляется путем поворота загрузочных узлов с датчиками 4, 6, 8 в кронштейнах 5, 7, 9 на необходимый угол с их последующей фиксацией стопорными винтами.
Проведенные на центрифуге испытания с большими перегрузками показывают возможность повышения точности пилотирования ЛА при неподвижном локтевом суставе и оптимальной регулировке боковой ручки под индивидуальные антропоцентрические особенности летчика.


Изобретение относится к средствам управления летательным аппаратом. Боковая кистевая ручка управления имеет три вращательные степени свободы с несимметричной загрузкой и регулируемым демпфированием. Она выполнена с регулировочным сборочным узлом нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, а также с регулируемыми сборочными узлами расстояния рукоятки от подлокотника ручки и от своих осей вращения. Рукоятка посредством регулируемого сборочного узла закреплена на кронштейне, закрепленном на оси одного загрузочного узла. Полученная сборка посредством другого кронштейна закреплена на оси другого загрузочного узла. Последняя сборка закреплена через кронштейн на оси третьего загрузочного узла. Все это закреплено с помощью следующего кронштейна на подлокотнике. Все загрузочные узлы имеют датчики угла поворота своих осей. Третья ось вращения рукоятки расположена под профилированным подлокотником ручки и максимально приближена к пятну контакта локтевого сустава руки летчика с подлокотником. Последний прикреплен через регулируемые сборочные узлы к боковой стенке кабины летательного аппарата. Все регулируемые и регулировочные сборочные узлы ручки выполнены в виде подпружиненных шлицевых соединений. Предложенная конструкция улучшит компоновку кабины, повысит комфортность летчика, точность пилотирования и надежность в работе ручки. 4 ил.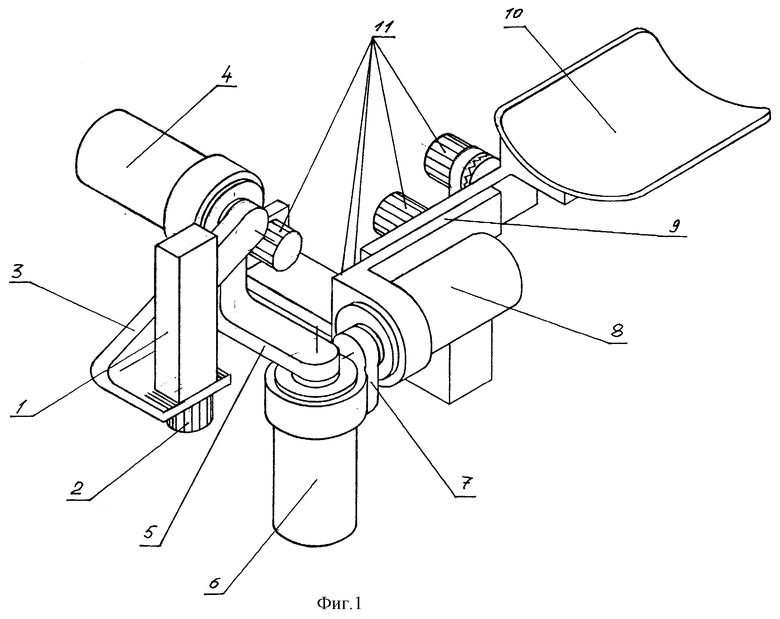
Боковая кистевая ручка управления летательным аппаратом, имеющая три вращательные степени свободы с несимметричной загрузкой и регулируемым демпфированием, выполнена с регулировочным сборочным узлом нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, а также с регулируемыми сборочными узлами расстояния рукоятки от подлокотника ручки и от своих осей вращения, причем рукоятка посредством регулируемого сборочного узла закреплена на кронштейне, закрепленном на оси одного загрузочного узла, имеющего датчик угла поворота оси указанного узла, получившаяся сборка посредством другого кронштейна закреплена на оси другого загрузочного узла, также имеющего датчик угла поворота оси указанного узла, в свою очередь эта сборка закреплена через кронштейн на оси третьего загрузочного узла с датчиком угла поворота оси третьего узла, все это закреплено с помощью следующего кронштейна на подлокотнике, отличающаяся тем, что третья ось вращения рукоятки расположена под профилированным подлокотником ручки и максимально приближена к пятну контакта локтевого сустава руки летчика с подлокотником, прикрепленным через регулируемые сборочные узлы к боковой стенке кабины летательного аппарата, причем все регулируемые и регулировочные сборочные узлы ручки выполнены в виде подпружиненных шлицевых соединений.
| US 4069720 А, 24.01.1978 | |||
| US 5379663 А, 10.01.1995 | |||
| US 5125602 А, 30.06.1992 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2007335C1 |
