Изобретение относится к области машиностроения, а именно к ручным дистанционным средствам управления подвижными наземными, авиационными и морскими объектами аппаратов, в частности к многоканальным (многоосевым) органам управления, и может быть использовано для внекабинного и внутрикабинного управления вертолетом, беспилотным вертолетом и другими транспортными средствами или средствами вооружения, а также управления и корректировки средств специального назначения, в том числе и двойного назначения. Изобретение может применяться также в качестве системы резервного управления и боковой ручки управления отдельными системами. В перспективе оно может применяться в качестве основного органа управления любым транспортным средством с автоматизированной системой управления. Многофункциональное устройство управления может быть интегрировано в уже существующие электродистанционные системы управления. Оно также может быть использовано в качестве тренажера, а также в качестве манипулятора, в том числе, игрового, в компьютерных приложениях.
Из уровня техники (см. заявку на изобретение RU 2011120142, В64С 13/04, опубл. 27.11.2012) известна активная система ручного управления летательным аппаратом с архитектурой органа управления и архитектурой управления для формирования ощущения для оператора летательного аппарата, причем архитектура органа управления содержит по меньшей мере одну механически перемещаемую ручку управления, по меньшей мере один исполнительный элемент для управления рукояткой управления и по меньшей мере одно средство определения по меньшей мере одного параметра состояния ручки управления, в особенности для определения по меньшей мере одного параметра состояния движения, и причем архитектура управления содержит по меньшей мере один регулятор движения для управления по меньшей мере одним исполнительным элементом и средство формирования ощущения для формирования по меньшей мере одного заданного параметра движения, при этом средство формирования ощущения непосредственно или опосредованно соединено с по меньшей мере одним регулятором движения, и сформированный заданный параметр может подаваться на регулятор движения, и причем по меньшей мере одно средство определения непосредственно/опосредованно соединено со средством формирования ощущения для подачи по меньшей мере одного параметра состояния. Регулятор движения представляет собой регулятор позиции, и/или регулятор скорости, и/или регулятор ускорения.
Из уровня техники также известно устройство ручного управления подвижным объектом, содержащее корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки, причем механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде консольно закрепленных на соответствующих осях вращения двух дуг, одна из которых отклоняется относительно вертикальной оси в канале азимута, а другая - относительно горизонтальной оси в канале угла места, причем они связаны между собой посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазе дуги канала азимута, при этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места, кроме этого, в корпусе устройства по каждому каналу управления установлен демпфер, кинематически связанный с осью вращения соответствующей дуги (см. RU 2253593, В64С 13/04, опубл. 10.06.2005). Устройство обеспечивает ручное управление подвижным объектом, в том числе, летательным аппаратом, только по двум каналам - каналу азимута и каналу угла места посредством поворота кисти руки вокруг двух взаимно перпендикулярных осей. Устройство не позволяет управлять углом относительно продольной оси.
Из уровня техники также известен многоосевой контроллер воздушного судна, содержащий цилиндрическую рукоятку, установленную по основной оси, проходящей параллельно оси тангажа воздушного судна, причем в нейтральном положении, предплечье оператора, связанное с рукояткой, проходит в основном параллельно оси крена воздушного судна, первый преобразователь для формирования управляющих сигналов при перемещении рукоятки в направлении продольной оси воздушного судна, второй преобразователь для генерирования сигналов при повороте рукоятки вокруг продольной оси воздушного судна, третий преобразователь для генерации сигналов вертикального перемещения рукоятки (см. EP 0164216 A1, В64С 13/04, опубл. 11.12.1985). Для управления по всем трем осям используется рукоятка, имеющая несколько степеней свободы, а для расположения руки оператора - опора, размещаемая на подлокотнике. Таким образом, устройство привязано к подлокотнику и не может быть использовано при любом произвольном положении руки оператора.
Наиболее близким к предложенному изобретению является трехосевое устройство управления летательным аппаратом в трех взаимно перпендикулярных плоскостях, содержащее рукоятку и связанный с ним узел контроля поворота кисти руки вокруг трех осей, включающее первый кольцевой элемент, сконструированный для поворота в первой плоскости, второй кольцевой элемент, концентрически установленный внутри указанного первого кольцевого элемента для вращения вокруг продольной оси упомянутого первого кольцевого элемента во второй плоскости, перпендикулярной указанной первой плоскости и перпендикулярно к продольной оси первого кольцевого элемента, а третий кольцевой элемент, шарнирно установленный на внутренней поверхности указанного второго кольцевого элемента для вращающегося движения в плоскости, перпендикулярной второй плоскости, при этом устройство содержит соединенный с кольцевыми элементами ложемент для предплечья оператора с пристяжными ремнями и электрические датчики угла поворота кольцевых элементов (см. патент US 3028126, В64С 13/04, 03.04.1962).
Недостатком последнего устройства является то, что при управлении углом крена при повороте кисти оператора вокруг продольной оси вместе с кистью поворачивается предплечье, а узел контроля поворачивается вместе с ложементом, которые никак не зафиксированы от поворота. При этом не будет происходить поворота кольцевого элемента, отслеживающего поворот кисти оператора вокруг продольной оси, относительно датчика угла поворота. Таким образом, управление поворотом летательного аппарата вокруг его продольной оси не может быть эффективно обеспечено данным устройством.
Задачей изобретения является обеспечение безопасного и эффективного пилотирования летательным аппаратом при выполнении управляющих действий одной рукой.
Техническим результатом изобретения, позволяющим решить поставленную задачу, является повышение точности управляющего воздействия при управлении углом поворота подвижного объекта вокруг продольной оси (креном) за счет обеспечения фиксации мягких тканей предплечья от поворота при выполнении кистью оператора действий по управлению углом поворота подвижного объекта вокруг его продольной оси.
Задача изобретения решается устройством для управления подвижным объектом, содержащим рукоятку управления, соединенный с ней узел контроля поворота кисти руки вокруг трех осей, включающий датчики угла поворота, соединенный с указанным узлом элемент крепления к предплечью и пристяжные элементы, причем согласно изобретению устройство снабжено элементом крепления к плечу, шарнирно соединенным с элементом крепления к предплечью с фиксацией элемента крепления к предплечью от поворота вокруг его продольной оси относительно элемента крепления к плечу, а пристяжные элементы закреплены на элементах крепления к предплечью и к плечу и на узле контроля поворота кисти руки с возможностью размещения указанных элементов крепления и узла контроля с внешней боковой стороны руки оператора.
Кроме того, узел контроля поворота кисти руки вокруг трех осей включает устройство управления по каналу азимута, устройство управления по поперечному каналу и устройство управления по продольному каналу, при этом устройство управления по каналу азимута включает два шарнирно соединенных друг с другом элемента, первый из которых соединен с рукояткой, а в шарнирном соединении размещен первый датчик угла поворота, устройство управления по поперечному каналу включает два шарнирно соединенных друг с другом элемента, первый из которых соединен со вторым элементом устройства управления по каналу азимута, в шарнирном соединении размещен второй датчик угла поворота, а ось поворота шарнира перпендикулярна оси поворота шарнира устройства управления каналом азимута, устройство управления по продольному каналу включает два элемента, соединенных друг с другом с возможностью перемещения друг относительно друга по дуге, при этом первый элемент соединен с пристяжным элементом для крепления к предплечью и соединен со вторым элементом устройства управления по поперечному каналу, второй элемент соединен с элементом крепления к предплечью в околозапястной зоне, а в месте соединения элементов размещен третий датчик угла поворота.
Кроме того, элемент крепления к предплечью и элемент крепления к плечу выполнены с возможностью регулирования длины каждого.
Кроме того, соединение рукоятки и первого элемента устройства управления по каналу азимута выполнено с возможностью регулирования расстояния от рукоятки до оси шарнира устройства управления по каналу азимута.
Кроме того, соединение второго элемента устройства управления по каналу азимута и первого элемента устройства управления по поперечному каналу выполнено с возможностью регулирования расстояния от второго элемента устройства управления по каналу азимута до оси шарнира устройства управления по поперечному каналу.
Кроме того, шарнирное соединение элементов крепления к плечу и к предплечью выполнено с двумя взаимно перпендикулярными осями поворота, одна из которых является осью поворота с изменением угла между продольными осями элементов крепления к предплечью и плечу, а другая параллельна оси поворота шарнира устройства управления по каналу азимута.
Кроме того, рукоятка снабжена элементом фиксации кисти руки.
Кроме того, рукоятка снабжена средством управления по вертикальному каналу или средством управления по каналу «газ».
Кроме того, рукоятка снабжена кнопками.
Кроме того, каждый датчик угла поворота представляет собой датчик магнитного поля и два магнита, при этом в каждом из устройств управления по каналам на одном из элементов размещены магниты, а на другом - датчик магнитного поля.
Кроме того, соединение каждого устройства управления по каналам выполнено с пружинным возвратным механизмом.
Кроме того, соединение второго элемента устройства управления по поперечному каналу и первого элемента устройства управления по продольному каналу выполнено с возможностью поворота указанных элементов друг относительно друга вокруг оси, параллельной оси поворота шарнира устройства управления по каналу азимута.
Изобретение поясняется чертежами.
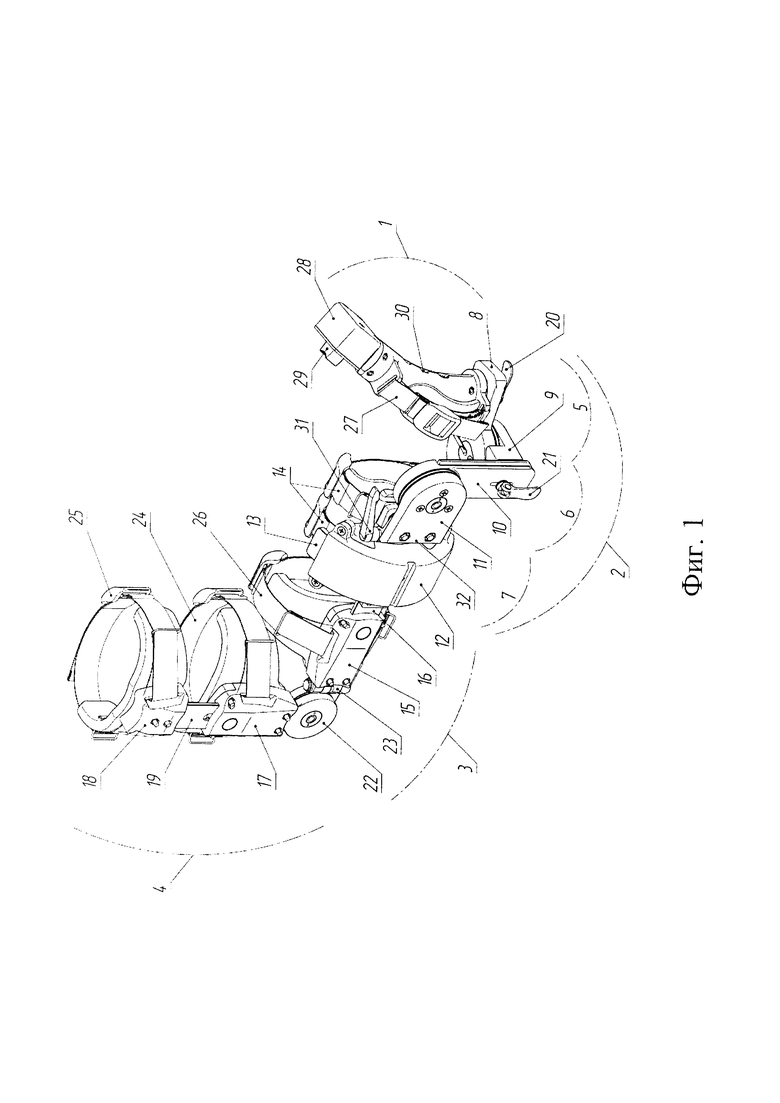
На фиг. 1 показан общий вид предложенного устройства.
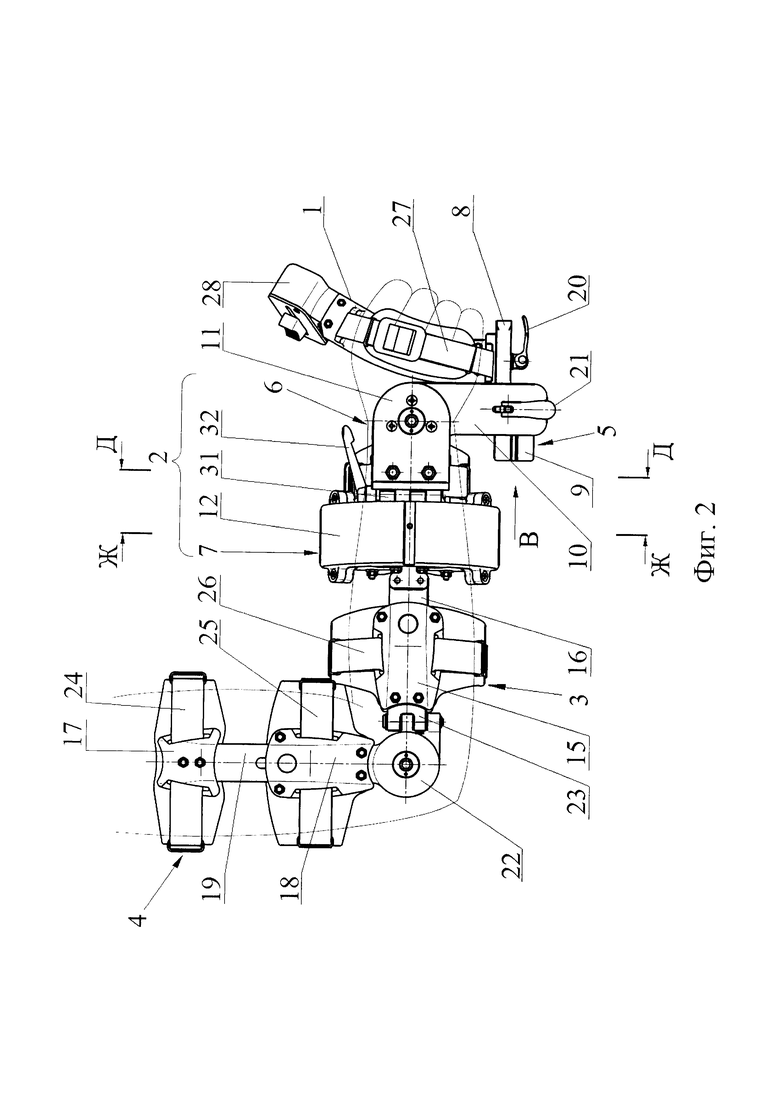
На фиг. 2 - предложенное устройство, вид спереди.
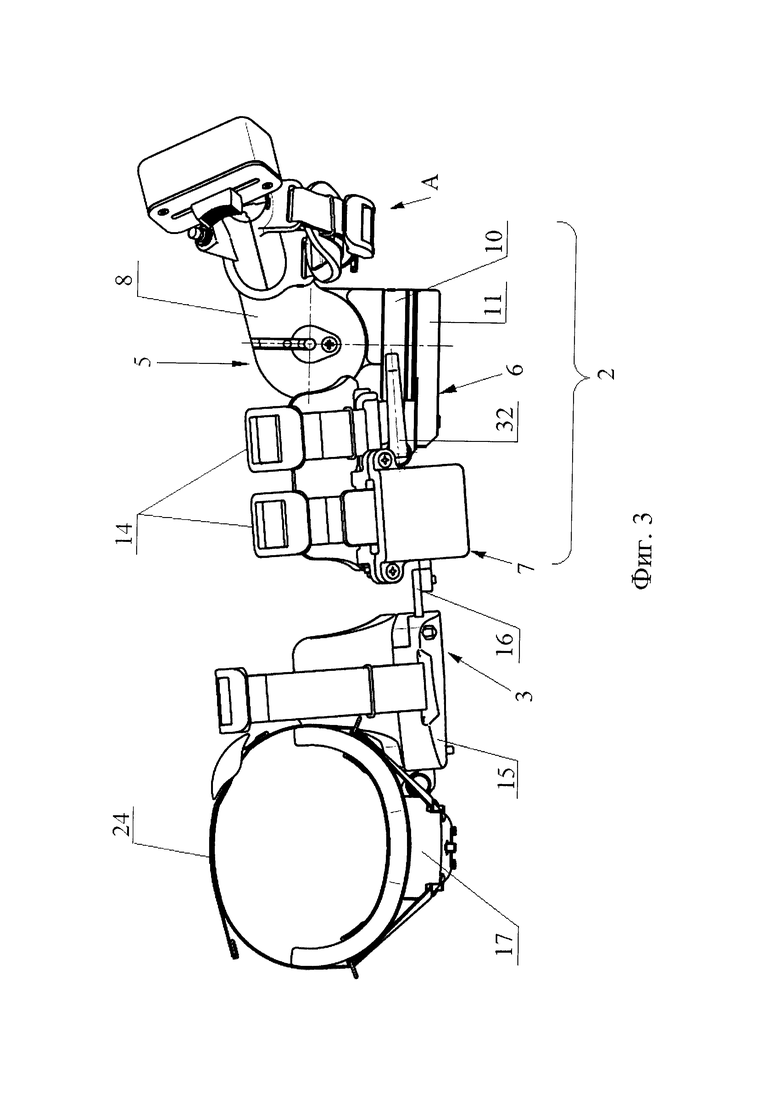
На фиг. 3 - то же, вид сбоку.
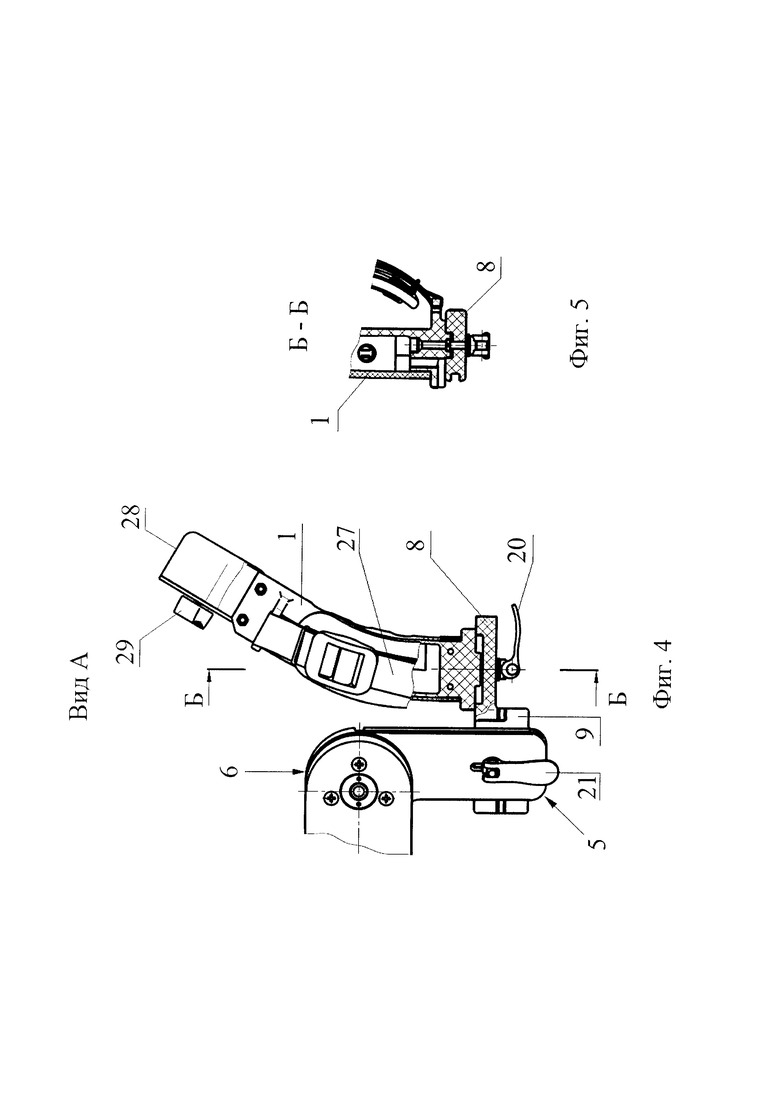
На фиг. 4 - вид по стрелке А на фиг. 3.
На фиг. 5 - разрез Б-Б на фиг. 4.
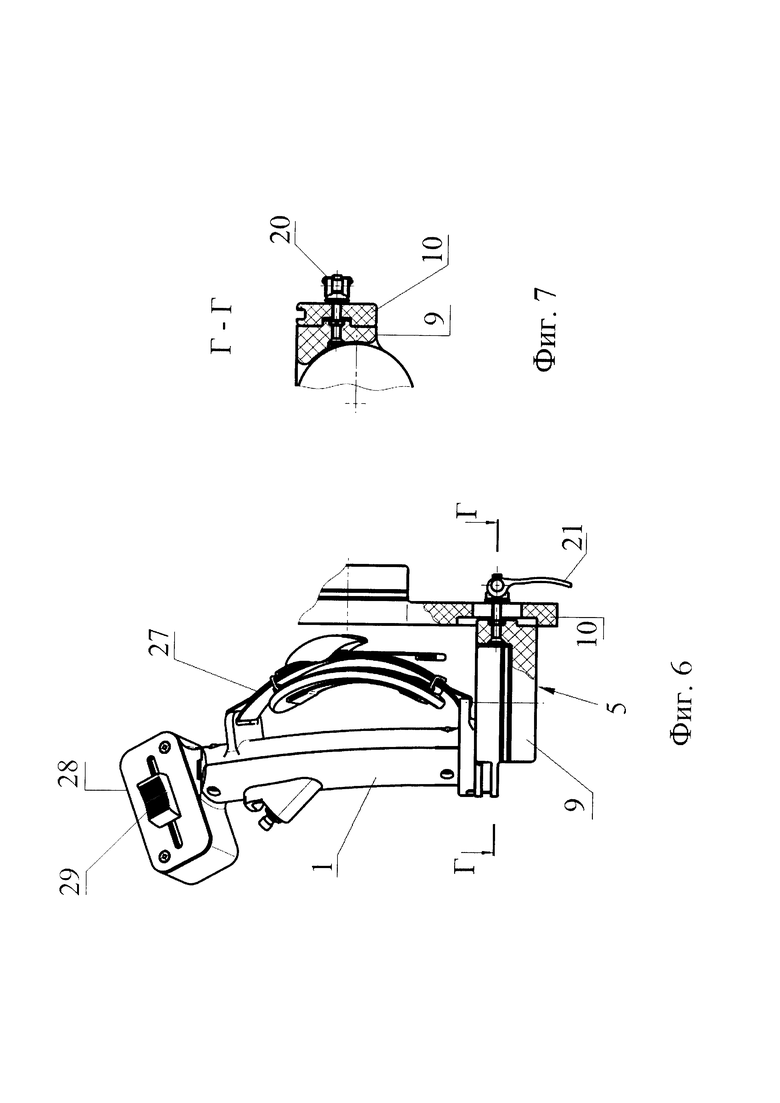
На фиг. 6 - вид по стрелке В на фиг. 2.
На фиг. 7 - разрез Г-Г на фиг. 6.
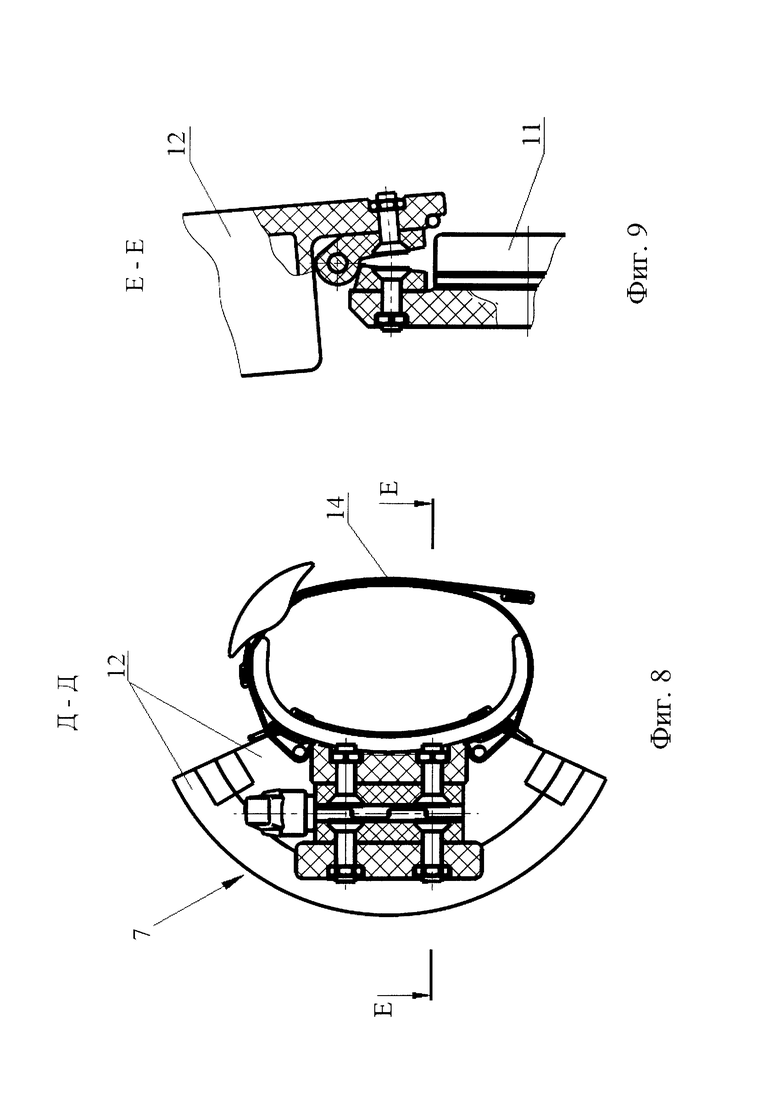
На фиг. 8 - разрез Д-Д на фиг. 2.
На фиг. 9 - разрез E-Ε на фиг. 8.
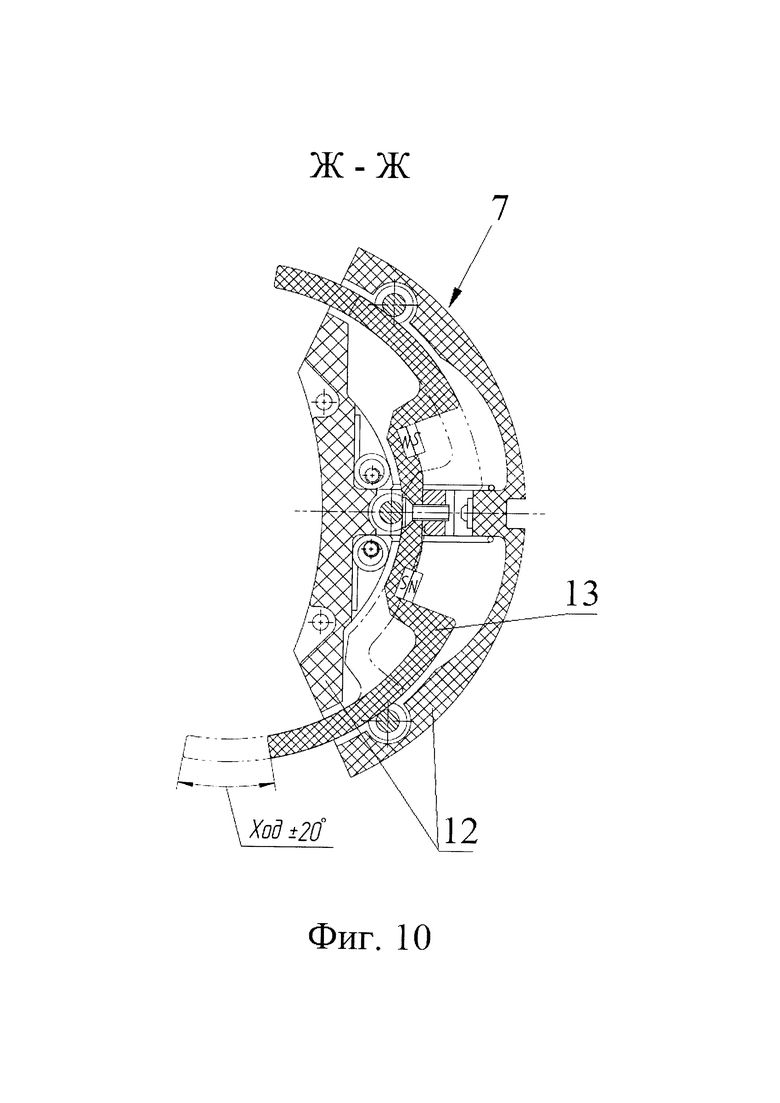
На фиг. 10 - разрез Ж-Ж на фиг. 2.
Многофункциональное устройство управления подвижным объектом содержит рукоятку 1 управления, соединенную с узлом 2 контроля поворота кисти руки вокруг трех взаимно перпендикулярных осей, который в свою очередь соединен с элементом 3 крепления к предплечью продолговатой формы, который шарнирно соединен с элементом 4 крепления к плечу также продолговатой формы. Узел 2 контроля и элементы 3 и 4 крепления образуют приклад для размещения с внешней наружной боковой стороны руки оператора подвижного объекта.
Узел 2 контроля поворота кисти руки включает устройство 5 управления по каналу азимута (для летательного аппарата - ЛА - по каналу курса), устройство 6 управления по поперечному каналу (для ЛА по каналу тангажа) и устройство 7 управления по продольному каналу (для ЛА - по каналу крена). Устройство 5 управления по каналу азимута включает два плоских элемента 8 и 9, соединенных осевым шарниром. Первый элемент 8 (управляющий рычаг) соединен с рукояткой 1.
Устройство 6 управления по поперечному каналу включает два плоских элемента 10 и 11, соединенных осевым шарниром. Первый элемент 10 (управляющий рычаг) соединен со вторым элементом 9 устройства 5 управления по каналу азимута. Ось поворота шарнира устройства 6 перпендикулярна оси поворота шарнира устройства 5.
Устройство 7 управления по продольному каналу включает два дугообразных элемента 12 и 13, соединенных друг с другом. Первый элемент 12 выполнен из двух частей, между которыми расположен второй элемент 13 с возможностью перемещения элементов 12 и 13 друг относительно друга по дуге. Первый элемент 12 соединен с пристяжным элементом - в данном случае в виде двух ремней 14 крепления к предплечью вблизи запястья и соединен со вторым элементом 11 устройства 6 управления по поперечному каналу, а второй элемент 13 соединен с элементом 3 крепления к предплечью вблизи локтя.
Элемент 3 крепления к предплечью и элемент 4 крепления к плечу выполнены с возможностью регулирования длины каждого. Элемент 3 крепления к предплечью состоит из основной части 15 и пластины 16 с пазом, соединенной со вторым элементом 13 устройства 7 управления углом крена. Основная часть 15 элемента 3 и пластина 16 соединены посредством фиксирующего элемента, расположенного в пазе пластины 16 с возможностью расфиксации с помощью кнопки, перемещения и фиксации и регулировки тем самым длины элемента 3 крепления к предплечью.
Аналогичным образом соединены две части 17 и 18 элемента 4 крепления к плечу посредством пластины 19.
Рукоятка 1 соединена с первым элементом 8 устройства 5 управления по каналу азимута с возможностью регулирования расстояния от рукоятки 1 до оси шарнира устройства 5 посредством перемещаемого в пазе первого элемента 8 эксцентрикового зажима 20.
Второй элемент 9 устройства 5 управления по каналу азимута соединен с первым элементом 10 устройства 6 управления по поперечному каналу с возможностью регулирования расстояния от второго элемента 9 устройства 5 до оси шарнира устройства 6 также посредством перемещаемого в пазе первого элемента 10 эксцентрикового зажима 21.
Элементы 3 и 4 крепления к предплечью и к плечу соединены посредством двух шарниров 22 и 23. Ось поворота шарнира 22 обеспечивает свободный поворот друг относительно друга продольных осей элементов 3 и 4 крепления к предплечью и плечу при сгибании и разгибании руки оператора в локтевом суставе. Ось поворота шарнира 23 параллельна оси поворота шарнира устройства 5 управления по каналу азимута. При этом данное шарнирное соединение жестко фиксирует элемент 3 крепления к предплечью от поворота вокруг собственной продольной оси.
Элемент 4 крепления к плечу соединен с двумя пристяжными элементами - ремнями 24 и 25, закрепленными соответственно на частях 17 и 18 элемента 4. Элемент 3 крепления к предплечью соединен с пристяжным элементом - ремнем 26, закрепленным на его основной части 15. На рукоятке 1 закреплен элемент фиксации кисти руки - ремень 27.
В верхней части рукоятки расположена головка 28 со средством управления по вертикальному каналу или средством управления по каналу «газ» в виде переключателя 29 (в вертолете - ползунок управления общим шагом винта, оптическим зумом на фото/видео камере, в самолете - «газ» двигателя, в автомобиле «газ» и другие). Вдоль рукоятки 1 расположены кнопки 30, программируемые на различные задачи, количество которых, в зависимости от различных требований, может быть от 6-ти до 12-ти.
Каждый датчик угла поворота друг относительно друга элементов устройств 5, 6 и 7 управления представляет собой пару - датчик магнитного поля, например, датчик Холла, и два магнита (на чертежах не показаны). В каждом из указанных устройств в углублениях одного из элементов расположены магниты, обращенные разными полюсами ко второму элементу, а в углублении второго элемента расположен аналоговый датчик Холла, регистрирующий перемещение магнитов при повороте элементов друг относительно друга. Датчики Холла позволяют осуществлять работу в температурном диапазоне от -40 до +60°С. При этом соединение элементов каждого из устройств 5, 6 и 7 управления выполнено с пружинным возвратным механизмом с четким безлюфтовым нулевым положением.
Второй элемент 11 устройства 6 управления по поперечному каналу и первый элемент 12 устройства 7 управления по продольному каналу соединены посредством шарнира 32 с зажимным рычагом 31 с возможностью поворота указанных элементов 11 и 12 друг относительно друга вокруг оси, параллельной оси поворота шарнира устройства 5 управления курсовым углом, и их фиксации.
В приведенном на чертежах примере выполнения предложенного устройства рукоятка 1, элементы устройств 5, 6, 7, части элементов 3 и 4 могут быть выполнены из твердых пластмасс методом литья, в частности из ABS-пластика методом литья под давлением. Ремни 14, 24, 25, 26, 27 могут быть выполнены из нейлоновой стропы, подкладки под ремни - из пористой резины. Для фиксации ремней использованы пряжки регулировочные для стропы.
Устройство работает следующим образом.
В исходном положении эксцентриковые зажимы 20, 21 и шарнир 32 расфиксированы, ремни 14, 24, 25, 26, 27 расстегнуты. Устройство закрепляется на правой руке оператора с ее внешней боковой стороны. Кисть оператора охватывает рукоятку 1, ремни 24 и 25 застегиваются на плече оператора, ремни 14 и 26 - на предплечье. Регулируют длину элементов 3 и 4 крепления к предплечью и плечу ±20 мм с шагом 10 мм. Регулируют длину рукоятки 1 (±10 мм) и фиксируют эксцентриковый зажим 20. Фиксируют кисть на рукоятке 1 с помощью ремня 27. Регулируют положение устройства 5 относительно устройства 6 (±10 мм) в зависимости от высоты кисти и фиксируют эксцентриковый зажим 21. Регулируют прилегание приклада (~5…150) и фиксируют зажим 32 шарнира 31. Таким образом, предложенное устройство обеспечивает возможность регулировки для подгонки под индивидуальные антропометрические параметры оператора для обеспечения досягаемости рукоятки 1 и хорошего ее обхвата.
Одноосевое крепление шарниров позволяет осуществить быстрое снятие и надевание устройства на руку. Свободный локтевой шарнир 22 позволяет быстро надевать и снимать устройство. Шарнир 32 с зажимом 31 позволяет быстро освободить кисть руки без снятия приклада.
В нормальном нулевом положении устройство соответствует естественной анатомии человека, что обеспечивает снижение психофизической нагрузки на оператора. Использование быстроразъемных эксцентриковых зажимов снижает время выполнения операций, связанных с регулировками конструкции под индивидуальную анатомию оператора. Может быть реализован походный режим посредством ослабления зажима 31 шарнира 32 и отведения в сторону рукоятки 1 и устройств 5 и 6, что позволяет оператору осуществлять деятельность другого вида, не снимая устройство.
Диапазон регулировок позволяет осуществлять подгонку элементов 3 и 4 крепления к предплечью и к плечу с ремнями 14, 24, 25 и 26, закрепляющими приклад на предплечье и плече оператора, для обеспечения максимальной устойчивости при осуществлении управляющих воздействий. При закреплении устройства непосредственно на коже или легкой одежде оператора, при отсутствии закрепления на плече оператора управляющие воздействия по продольному каналу (для ЛА - по каналу крена) могут сопровождаться движением мягких тканей, а вместе с ними и всего устройства. Это может привести к тому, что при повороте кисти оператора вокруг продольной оси может произойти поворот обоих элементов 12 и 13 устройства 7 управления по продольному каналу, и сигнал управления по продольному каналу не будет передаваться.
Управление по каналу азимута (для ЛА - направления курса) обеспечивается отведением и приведением кисти руки с рукояткой 1 «от себя/на себя». При этом первый и второй элементы 8 и 9 устройства 5 управления по каналу азимута поворачиваются друг относительно друга на ±30°, и установленный между ними датчик Холла преобразовывает механическое движение в электрические сигналы, которые преобразовываются в управляющие воздействия по каналу азимута.
Управление по поперечному каналу (в ЛА - по каналу тангажа) обеспечивается подниманием и опусканием кисти руки с рукояткой 1 относительно ее естественного положения. При этом первый и второй элементы 10 и 11 устройства 6 управления по поперечному каналу поворачиваются друг относительно друга на ±30°, и установленный между ними датчик Холла преобразовывает механическое движение в электрические сигналы, которые преобразовываются в управляющие воздействия по поперечному каналу.
Управление летательным аппаратом по продольному каналу (для ЛА - по каналу крена) обеспечивается наклонами рукоятки 1 вправо и влево (пронация/супинация). При этом первый и второй элементы 12 и 13 устройства 7 управления углом крена поворачиваются друг относительно друга на ±20°, и установленный между ними датчик Холла преобразовывает механическое движение в электрические сигналы, которые преобразовываются в управляющие воздействия по продольному каналу.
Шарнир 22 обеспечивает свободный не отслеживаемый поворот элементов 3 и 4 крепления к предплечью и плечу относительно друг друга.
Для осуществления управляющих воздействий по вертикальному каналу или по каналу шаг-газ перемещают ползунок (переключатель 29) на головке 28 рукоятки 1 в диапазоне ±20 мм. Установленный в головке 28 и соединенный с ползунком 29 движковый переменный резистор преобразовывает механическое движение в электрические сигналы, которые преобразовываются в управляющие воздействия по вертикальному каналу.
Все датчики соединены объединенными в единый кабель проводами с блоком сопряжения. Блок сопряжения обеспечивает считывание и обработку электрических сигналов, поступающих от датчиков угла поворота. Обработка электрических сигналов проходит по всем четырем каналам управления. Помимо обработки указанных каналов управления, на блоке сопряжения обрабатываются сигналы с блока кнопок 30. Блок сопряжения способен обрабатывать до 12 программируемых кнопок 30 и один переключатель 29 - плавно перемещаемый ползунок.
Для осуществления управляющих воздействий в предложенном устройстве предусмотрены четыре оси управления, позволяющие перемещаться подвижному объекту, в частности, летательному аппарату по шести координатам в полной мере. Каналы тангажа, крена и направления курса изменяются по вращательной схеме, канал шаг-газ изменяется по схеме передвижения переключателя 29 влево и вправо, что формирует метрическое представление о положении переключателя 29. Движение рукоятки 1 соответствует естественным перемещениям лучезапястного сустава оператора, что является благоприятным для формирования образа полета и переноса стереотипа навыков пилотирования посредством других органов управления. Для управления целевой нагрузкой в рукоятку 1 интегрированы кнопки 30, в количестве шести штук. Кнопки 30 могут быть задействованы для любой задачи, требующей одноразовое включение или выключение, например, захват цели, отказ от захвата цели, включение/выключение специального оборудования и т.д. Возможна установка комбинированного режима кнопок - нажатие двух одновременно. Количество кнопок может быть увеличено до 12-ти, путем дополнительных конструкций и конструктивных изменений. Установленное количество кнопок является исключительно демонстрацией возможности их установки, а также предметом для исследования совмещенной деятельности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| МАНИПУЛЯЦИОННЫЙ МОДУЛЬ ЭКЗОСКЕЛЕТА, ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА, ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА | 2020 |
|
RU2769584C1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
Изобретение относится к области машиностроения, а именно к ручным дистанционным средствам управления подвижными наземными, авиационными и морскими объектами. Устройство управления подвижным объектом содержит рукоятку (1) управления, с которой соединен узел (2) контроля поворота кисти руки вокруг трех осей, с которым соединен элемент (3) крепления к предплечью. Узел (2) контроля включает датчики поворота кисти оператора вокруг трех осей. Устройство снабжено элементом (4) крепления к плечу, шарнирно соединенным с элементом (3) крепления к предплечью с фиксацией элемента (3) крепления к предплечью от поворота вокруг его продольной оси относительно элемента (4) крепления к плечу. Пристяжные элементы (14), (24), (25), (26) закреплены на элементах (3) и (4) крепления к предплечью и к плечу и на узле (2) контроля поворота кисти руки с возможностью размещения указанных элементов (3) и (4) крепления и узла (2) контроля с внешней боковой стороны руки оператора. Достигается повышение точности управляющего воздействия. 11 з.п. ф-лы, 10 ил.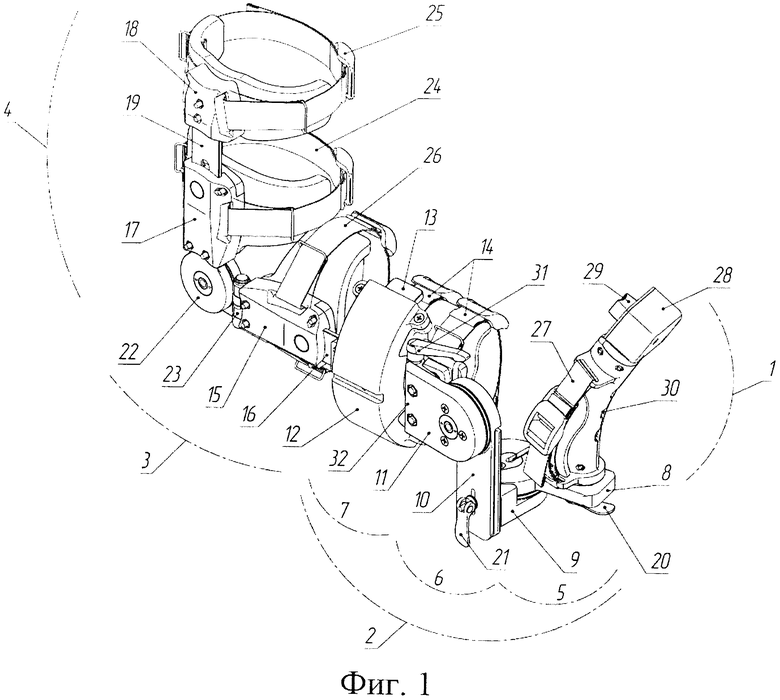
1. Устройство управления подвижным объектом, содержащее рукоятку управления, соединенный с ней узел контроля поворота кисти руки вокруг трех осей, включающий датчики углов поворота, соединенный с указанным узлом элемент крепления к предплечью и пристяжные элементы, отличающееся тем, что оно снабжено элементом крепления к плечу, шарнирно соединенным с элементом крепления к предплечью с фиксацией элемента крепления к предплечью от поворота вокруг его продольной оси относительно элемента крепления к плечу, а пристяжные элементы закреплены на элементах крепления к предплечью и к плечу и на узле контроля поворота кисти руки с возможностью размещения указанных элементов крепления и узла контроля с внешней боковой стороны руки оператора.
2. Устройство по п. 1, отличающееся тем, что узел контроля поворота кисти руки вокруг трех осей включает устройство управления по каналу азимута, устройство управления по поперечному каналу и устройство управления по продольному каналу, при этом устройство управления по каналу азимута включает два шарнирно соединенных друг с другом элемента, первый из которых соединен с рукояткой, а в шарнирном соединении размещен первый датчик угла поворота, устройство управления по поперечному каналу включает два шарнирно соединенных друг с другом элемента, первый из которых соединен со вторым элементом устройства управления по каналу азимута, в шарнирном соединении размещен второй датчик угла поворота, а ось поворота шарнира перпендикулярна оси поворота шарнира устройства управления каналом азимута, устройство управления по продольному каналу включает два элемента, соединенных друг с другом с возможностью перемещения друг относительно друга по дуге, при этом первый элемент соединен с пристяжным элементом для крепления к предплечью и соединен со вторым элементом устройства управления по поперечному каналу, второй элемент соединен с элементом крепления к предплечью в околозапястной зоне, а в месте соединения элементов размещен третий датчик угла поворота.
3. Устройство по п. 1, отличающееся тем, что элемент крепления к предплечью и элемент крепления к плечу выполнены с возможностью регулирования длины каждого.
4. Устройство по п. 2, отличающееся тем, что соединение рукоятки и первого элемента устройства управления по каналу азимута выполнено с возможностью регулирования расстояния от рукоятки до оси шарнира устройства управления по каналу азимута.
5. Устройство по п. 2, отличающееся тем, что соединение второго элемента устройства управления по каналу азимута и первого элемента устройства управления по поперечному каналу выполнено с возможностью регулирования положения второго элемента устройства управления по каналу азимута относительно оси шарнира устройства управления по поперечному каналу.
6. Устройство по п. 2, отличающееся тем, что шарнирное соединение элементов крепления к плечу и к предплечью выполнено с двумя взаимно перпендикулярными осями поворота, одна из которых является осью поворота с изменением угла между продольными осями элементов крепления к предплечью и плечу, а другая параллельна оси поворота шарнира устройства управления по каналу азимута.
7. Устройство по п. 1, отличающееся тем, что рукоятка снабжена элементом фиксации кисти руки.
8. Устройство по п. 1, отличающееся тем, что рукоятка снабжена средством управления по вертикальному каналу или по каналу «газ».
9. Устройство по п. 1, отличающееся тем, что рукоятка снабжена кнопками.
10. Устройство по п. 2, отличающееся тем, что каждый датчик угла поворота представляет собой пару - датчик магнитного поля и два магнита, при этом в каждом из устройств управления на одном из пары элементов размещены магниты, а на другом - датчик магнитного поля.
11. Устройство по п. 2, отличающееся тем, что соединение каждого устройства управления выполнено с пружинным возвратным механизмом.
12. Устройство по п. 2, отличающееся тем, что соединение второго элемента устройства управления по поперечному каналу и первого элемента устройства управления по продольному каналу выполнено с возможностью поворота указанных элементов друг относительно друга вокруг оси, параллельной оси поворота шарнира устройства управления по каналу азимута.
| US 3028126 A1, 03.04.1962 | |||
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| US 20080033597 A1, 07.02.2008. | |||

