Область техники, к которой относится изобретение
Изобретение относится к области авиации, а именно к дистанционным средствам управления летательных аппаратов, в частности к многоканальным органам управления (МОУ), и может быть использована для внекабинного и внутрикабинного управления вертолетом, беспилотным вертолетом и другими транспортными средствами или средствами вооружения, а также управления и корректировки средств специального назначения, в том числе и двойного назначения. Многоканальный орган управления может применяться также в качестве системы резервного управления и боковой ручки управления отдельными системами. В перспективе он может применяться в качестве основного органа управления любого транспортного средства с автоматизированной системой управления. Многоканальный орган управления может быть интегрирован в уже существующие электродистанционные системы управления.
Уровень техники
Из уровня техники (см. заявку на изобретение RU 2011120142, B64C 13/04, опубл. 27.11.2012) известна активная система ручного управления летательным аппаратом с архитектурой органа управления и архитектурой управления для формирования ощущения для оператора летательного аппарата, причем архитектура органа управления содержит по меньшей мере одну механически перемещаемую ручку управления, по меньшей мере один исполнительный элемент для управления рукояткой управления и по меньшей мере одно средство определения для определения по меньшей мере одного параметра состояния ручки управления, в особенности для определения по меньшей мере одного параметра состояния движения, и причем архитектура управления содержит по меньшей мере один регулятор движения для управления по меньшей мере одним исполнительным элементом и средство формирования ощущения для формирования по меньшей мере одного заданного параметра движения, при этом средство формирования ощущения непосредственно или опосредованно соединено с по меньшей мере одним регулятором движения, и сформированный заданный параметр может подаваться на регулятор движения, и причем по меньшей мере одно средство определения непосредственно/опосредованно соединено со средством формирования ощущения для подачи по меньшей мере одного параметра состояния.
Недостатком указанного аналога заявленного изобретения является невозможность обеспечить безопасное и эффективное пилотирование летательного аппарата, при обеспечении выполнения управляющих действий по пилотированию летательного аппарата одной рукой.
Из уровня техники также известно устройство ручного управления подвижным объектом, содержащее корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки, причем механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде консольно закрепленных на соответствующих осях вращения двух дуг, одна из которых отклоняется относительно вертикальной оси в канале азимута, а другая - относительно горизонтальной оси в канале угла места, причем они связаны между собой посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазе дуги канала азимута, при этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места, кроме этого в корпусе устройства по каждому каналу управления установлен демпфер, кинематически связанный с осью вращения соответствующей дуги (см. RU 2253593, B64C 13/04, опубл. 10.06.2005).
Недостатком указанного аналога заявленного изобретения является невозможность обеспечить безопасное и эффективное пилотирование летательного аппарата, при обеспечении выполнения управляющих действий по пилотированию летательного аппарата одной рукой.
Еще одним аналогом заявленного изобретения является многоосевой контроллер воздушного судна, содержащий цилиндрическую рукоятку, установленную по основной оси, проходящей параллельно оси тангажа воздушного судна, причем в нейтральном положении, предплечье оператора, связанное с рукояткой, проходит в основном параллельно оси крена воздушного судна, первый преобразователь для формирования управляющих сигналов при перемещении рукоятки в направлении продольной оси воздушного судна, второй преобразователь для генерирования сигналов при повороте рукоятка вокруг продольной оси воздушного судна, третий преобразователь для генерации сигналов вертикального перемещения рукоятки (см. ЕР 0164216 A1, B64C 13/04, опубл. 11.12.1985).
Недостатком указанного аналога заявленного изобретения является невозможность обеспечить безопасное и эффективное пилотирование летательного аппарата, при обеспечении выполнения управляющих действий по пилотированию летательного аппарата одной рукой.
Наиболее близким аналогом заявленного изобретения является устройство управления транспортным средством в трех взаимно перпендикулярных плоскостях, содержащее первый кольцевой элемент, сконструированный для поворота в первой плоскости, второй кольцевой элемент, концентрически установленный внутри указанного первого кольцевого элемента для вращения вокруг продольной оси упомянутого первого кольцевого элемента во второй плоскости, перпендикулярной указанной первой плоскости и перпендикулярно к продольной оси первого кольцевого элемента, а третий кольцевой элемент, шарнирно установленный на внутренней поверхности указанного второго кольцевого элемента для вращающегося движения в плоскости, перпендикулярной второй плоскости (см. патент US 3028126, B64C 13/04, 03.04.1962).
Недостатком указанного аналога заявленного изобретения является невозможность обеспечить безопасное и эффективное пилотирование летательного аппарата при обеспечении выполнения управляющих действий по пилотированию летательного аппарата одной рукой.
Сущность изобретения
Задачей, решаемой заявленным изобретением, является обеспечение безопасного и эффективного пилотирования летательным аппаратом, обеспечение выполнения управляющих действий по пилотированию летательного аппарата одной рукой.
Технический результат предлагаемого изобретения заключается в повышении безопасности и эффективности управления летательным аппаратом.
Указанный технический результат обеспечивается за счет того, что многоканальный орган управления летательным аппаратом, состоящий из ложемента, установленного на ложементе механизма управляющего воздействия по каналу крена, причем на механизм управляющего воздействия по каналу крена установлен регулировочный элемент установки в положение, приемлемое для совершения управляющих воздействий, на который установлен механизм двухосевого вращения, обеспечивающий считывание сигналов для преобразования их в управляющее воздействие по каналу тангажа и направления курса, к которому в свою очередь присоединена посредством регулировочных элементов рукоятка.
По варианту выполнения заявленного изобретения механизм двухосевого вращения представляет собой прямоугольную рамку, к которой присоединен нижний регулировочный элемент рукоятки, для установки различного расстояния от центра лучезапястного сустава до оси обхвата рукоятки кистью руки оператора в зависимости от антропометрических особенностей оператора.
По варианту выполнения заявленного изобретения рукоятка выполнена с по меньшей мере тремя кнопками, установленными на боковой поверхности, причем на верхней поверхности рукоятки установлен ползунок управления общим шагом винта.
По варианту выполнения заявленного изобретения ложемент состоит из основной регулировочной подложки, закрепленной на ней регулировочной спице и конструктивного нагрузочного элемента регулировочной спицы.
По варианту выполнения заявленного изобретения механизм управляющего воздействия по каналу крена состоит из механизма считывания сигналов от поворота лучезапястного сустава для преобразования его в управляющее воздействие по каналу крена, установленной на нем элементе зубчатой передачи и вала, обеспечивающего ход для механизма управления каналом крена, на который в свою очередь установлена шестеренка механизма управляющего воздействия по каналу крена, кроме того, на механизм управляющего воздействия по каналу крена установлен датчик управления каналом крена
По варианту выполнения заявленного изобретения крепление ложемента на предплечье руки предусмотрено путем застегивания ремней.
По варианту выполнения заявленного изобретения многоканальный орган управления выполнен с возможностью установки дисплеев, объединенных в приборную доску, причем на экранах дисплеев приборной доски отображается информация с камеры реального времени или данные авиационных приборов, таких как: авиагоризонт, высотометр, направление курса.
По варианту выполнения заявленного изобретения приборная доска выполнена складной.
На основе использования многоканального органа управления может быть достигнуто повышение эффективности управления, в сравнении с традиционными органами управления, снижение сроков обучения персонала, повышение безопасности полетов в целом.
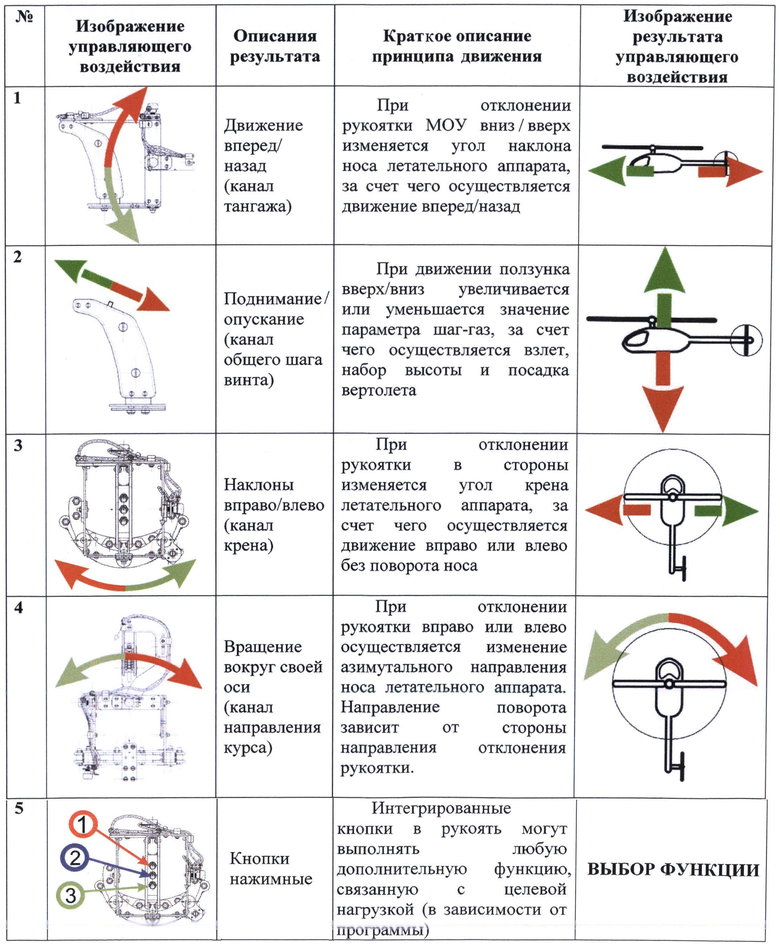
МОУ обеспечивает выполнение летчиком (оператором) управляющих действий по пилотированию беспилотного вертолета одной рукой (правой) по 4-м каналам (продольном, поперечном, азимутальном и вертикальном) управления.
Разработанный и изготовленный ложемент для предплечья обеспечивает надежную фиксацию многоканального органа управления и комфортность для оператора.
Конструктивно, в разработанном многоканальном органе управления и ложементе, достигнуто обеспечение функциональной подвижности пальцев, кисти, лучезапястного сустава, а также вращения предплечья в направлениях «на себя» (пронацио) и «от себя» (супинацио).
Многоканальный орган управления позволяет оптимизировать работоспособность человека, не позволяя совершать ошибки или предостерегать их и свести загруженность к минимуму.
Определены параметры движения в лучезапястном суставе при фиксированном предплечье в ложементе.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеприведенного описания примеров реализации заявленного многоканального органа управления с использованием чертежей (фиг.1 -10).
На фиг.1 - Многоканальный орган управления летательным аппаратом;
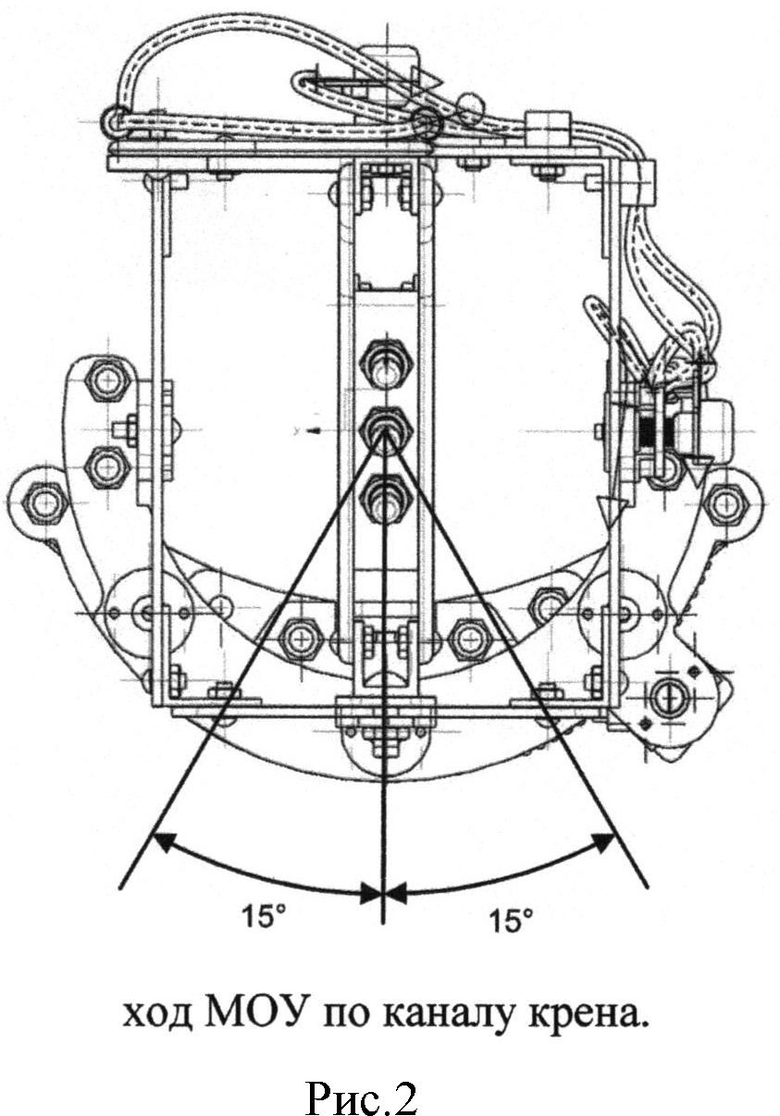
На фиг.2 - Ход МОУ по каналу крена;
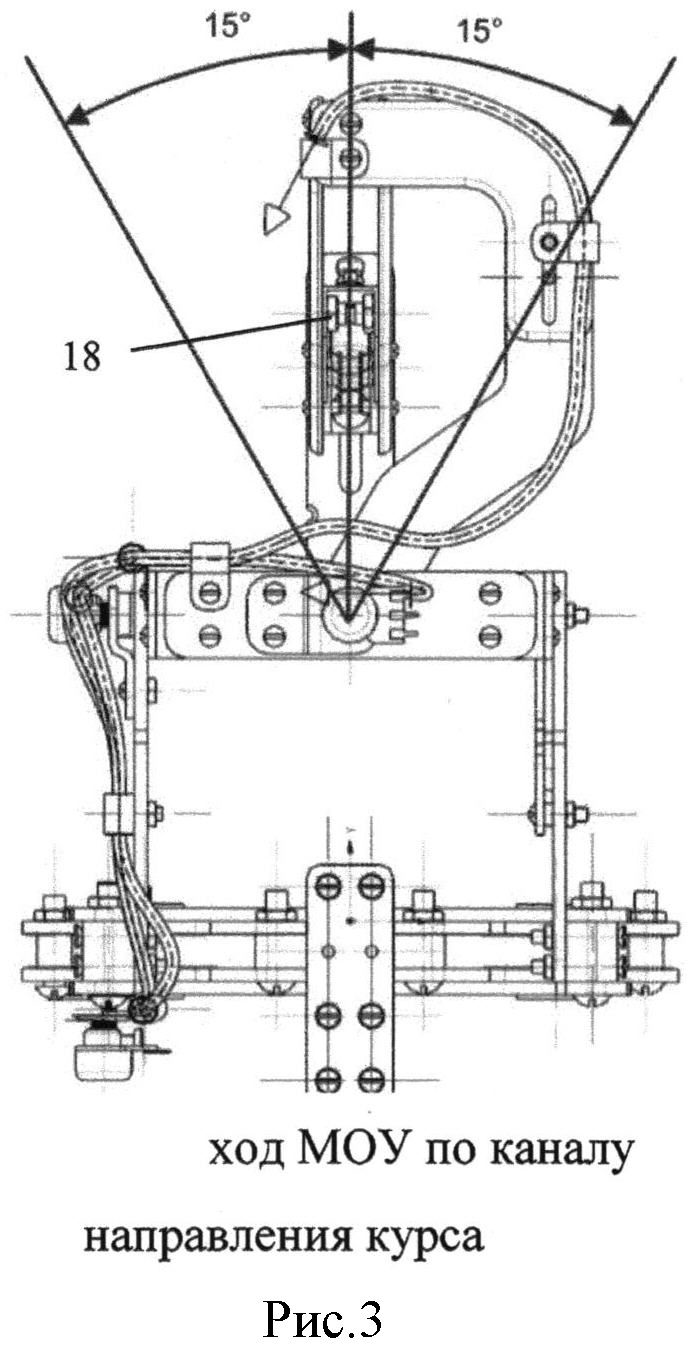
На фиг.3 - Ход МОУ по каналу направления курса;
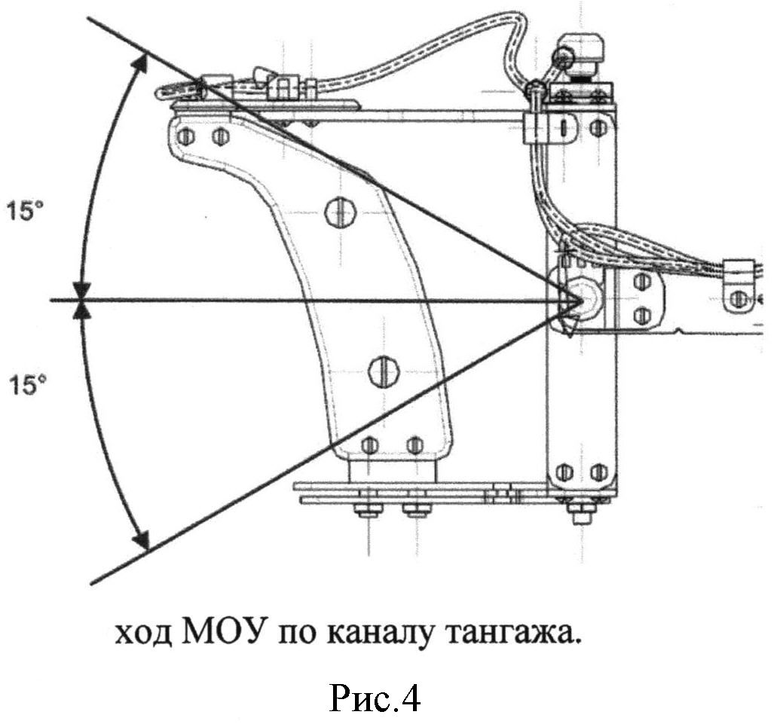
На фиг.4 - Ход МОУ по каналу тангажа;
На фиг.5 - Ход МОУ по каналу управления общим шагом несущего винта;
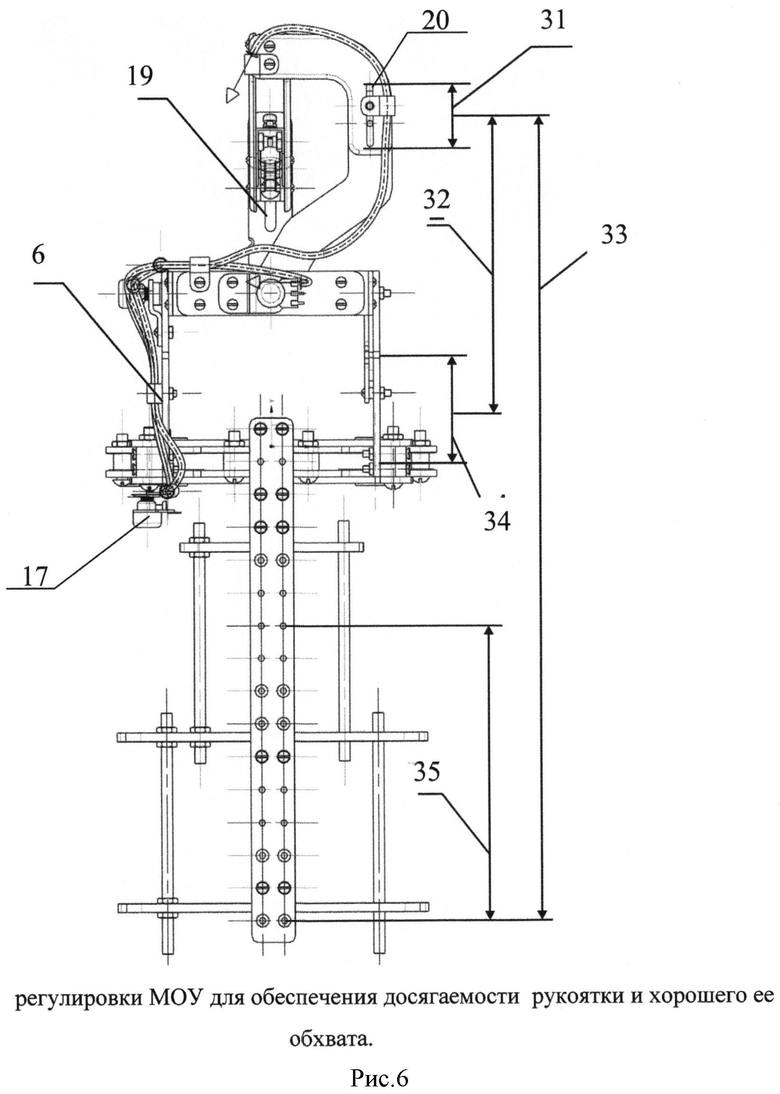
На фиг.6 - Регулировки МОУ для обеспечения досягаемости рукоятки и хорошего ее обхвата;
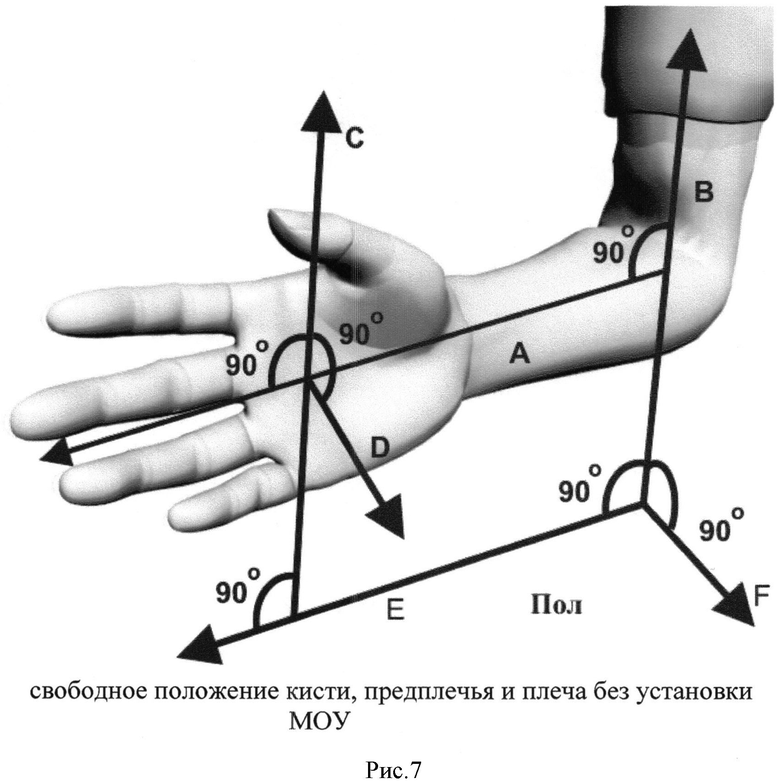
На фиг.7 - Свободное положение кисти, предплечья и плеча без установки МОУ;
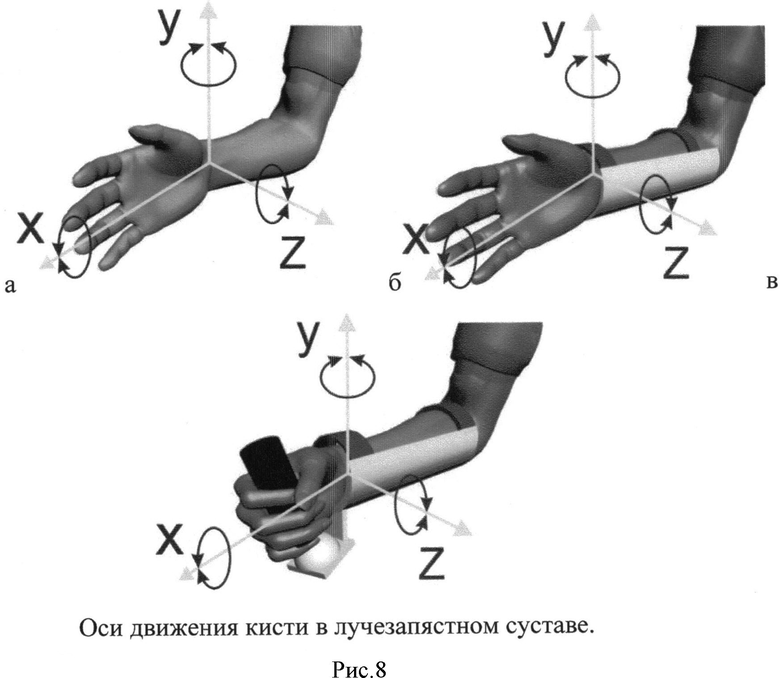
На фиг.8 - Оси движения кисти в лучезапястном суставе;
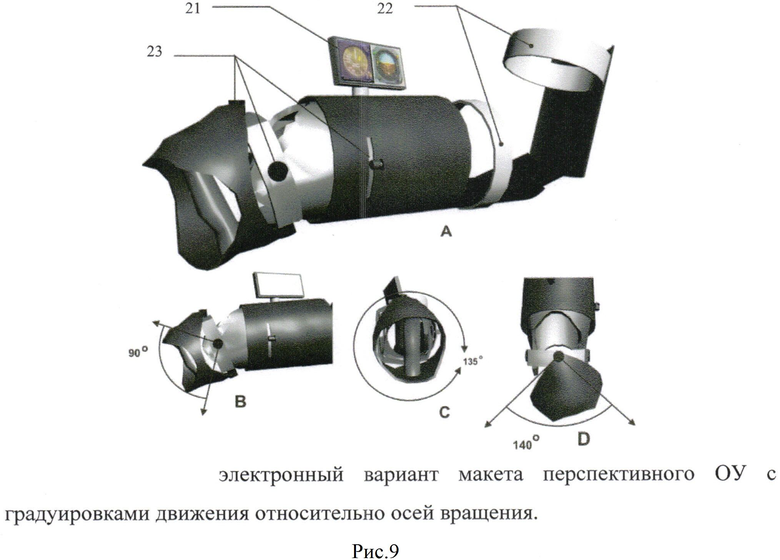
На фиг.9 - Электронный вариант макета перспективного ОУ с градуировками движения относительно осей вращения;
На фиг.10 - Примерная функциональная схема комплекса.
На фигурах позициями обозначены следующие элементы конструкции заявленного устройства: 1 - рукоятка управления; 2 - блок кнопок; 3 - верхний регулировочный элемент рукоятки; 4 - датчик управления каналом курса; 5 - датчик управления каналом тангажа; 6 - регулировочный элемент с отверстиями, сопрягающимися с поворотным механизмом, для установки рукоятки в положение, приемлемое для совершения управляющих воздействий по каналу крена; 7 - элемент зубчатой передачи механизма, обеспечивающего управляющие воздействия по каналу крена; 8 - шестеренка механизма, обеспечивающего управляющие воздействия по каналу крена; 9 - регулировочные спицы; 10 - основная регулировочная подложка ложемента; 11 - нагрузочный элемент для регулировочных спиц; 12 - выносной кронштейн для установки шестеренки и датчика крена; 13 - вал, обеспечивающий ход для механизма управления каналом крена; 14 - механизм, обеспечивающий считывание сигналов от поворота лучезапястного сустава (пронация/супинация) для преобразования его в управляющие воздействия по каналу крена посредством закрепления датчика крена и зубчатой передачи; 15 - механизм двухосевого вращения; 16 - нижний регулировочный элемент рукоятки; 17 - датчик управления каналом крена; 18 - ползунок управления общим шагом несущего винта, 19 - регулировочная прорезь для обеспечения подгонки ползунка управления общим шагом несущего винта под индивидуальные антропометрические параметры оператора; 20 - регулировочные прорези (в верхнем 3 и нижнем 16 регулировочных элементах рукоятки) для возможности подгонки расстояния центра осей вращения 2-х степеней свободы лучезапястного сустава и центральной оси обхвата кисти руки (ход регулировки составляет 20 мм); 31, 32, 33, 34, 35 - диапазоны регулировок под индивидуальные антропометрические параметры оператора.
На фиг.7 - A - ось симметрии предплечья; B - ось симметрии плеча; C - поперечная ось симметрии кисти; D - ось симметрии параллельная F; Е - продольная ось симметрии пола; F - поперечная ось симметрии пола.
На фиг.8 - а) Свободное положение предплечья; б) Предплечье, фиксированное ложементом; в) Фиксированное предплечье с ручкой. X - пронация, супинация; Y - отведение, приведение; Z - поднимание, опускание.
На фиг.9 - А - Общий вид; В - Вид с боку; С - Вид спереди; D - Вид сверху; 21 - Многофункциональный дисплей; 22 - Ремни крепления; 23 - Места размещения датчиков.
Раскрытие изобретения
Основным силовым конструктивным элементом заявленного устройства является ложемент. Ложемент состоит из основной регулировочной подложки (10), закрепленных на ней регулировочных спиц (9) и конструктивного нагрузочного элемента (11) регулировочных спиц. Регулировочные спицы обеспечивают установку относительных расстояний закрепления ремней на предплечье в зависимости от индивидуальных антропометрических особенностей оператора. Конструктивный нагрузочный элемент для регулировочных спиц обеспечивает регулировку ремней по диаметру в зависимости от индивидуальных антропометрических особенностей оператора.
На ложементе установлен выносной конструктивный кронштейн (12). Посредством выносного конструктивного кронштейна на ложемент установлен механизм управляющего воздействия по каналу крена. Механизм управляющего воздействия по каналу крена состоит из механизма считывания сигналов (14) от поворота лучезапястного сустава для преобразования его в управляющее воздействие по каналу крена, установленный на нем элемент зубчатой передачи и вала (13), обеспечивающего ход для механизма управления каналом крена, на который в свою очередь установлена шестеренка (8) механизма управляющего воздействия по каналу крена. Также на кронштейн установлен датчик управления каналом крена (17).
К механизму управляющего воздействия по каналу крена, в частности к механизму считывания сигналов от поворота лучезапястного сустава, прикреплен регулировочный элемент (6) установки в положение, приемлемое для совершения управляющих воздействий, в зависимости от индивидуальных антропометрических особенностей оператора. На регулировочный элемент установки в положение, приемлемое для совершения управляющих воздействий, установлен механизм двухосевого вращения (15), обеспечивающий считывание сигналов для преобразования их в управляющее воздействие по каналу тангажа и направления курса. Механизм двухосевого вращения представляет собой прямоугольную рамку, к которой в свою очередь присоединен нижний регулировочный элемент (16) рукоятки, для установки различного расстояния от центра лучезапястного сустава до оси обхвата рукоятки кистью руки оператора в зависимости от антропометрических особенностей оператора. На нижний регулировочный элемент (16) рукоятки установлена рукоятка (1) для обхвата оператором, позволяющая совершать управляющие воздействия над 4-х осевым механизмом управления. Также на механизме двухосевого вращения установлен верхний регулировочный элемент (3) рукоятки, предназначенный для установки различного расстояния от центра лучезапястного сустава до оси обхвата рукоятки кистью руки оператора в зависимости от индивидуальных антропометрических особенностей оператора. Датчик управления каналом тангажа (5) установлен в месте соединения регулировочного элемента (6) установки положения приемлемого для совершения управляющих воздействий в зависимости от индивидуальных антропометрических особенностей оператора и механизма двухосевого вращения (15).
Рукоятка управления (1) для обхвата рукой оператора позволяет совершать управляющие воздействия над четырехосевым механизмом управления. Рукоятка выполнена с блоком кнопок (3), например тремя кнопками, установленными на боковой поверхности, причем количество кнопок, в зависимости от различных требований, может быть увеличено до двенадцати. Архитектура многоканального органа управления выполнена с возможностью программирования различных выполняющих команд, возложенных на указанные кнопки. На верхней поверхности рукоятки установлен ползунок управления общим шагом винта (18).
Мобильность устройства обеспечивается за счет отказа от стационарного места установки органа управления путем его закрепления на индивидуальном ложементе. Закрепление ложемента на предплечье руки предусмотрено путем застегивания ремней.
Многоканальный орган управления выполнен с возможностью установки дисплеев, объединенных в приборную доску (многофункциональный дисплей (21)). На экранах дисплеев приборной доски отображается информация с камеры реального времени или данные авиационных приборов, таких как:
авиагоризонт, высотометр, направление курса и т.д. Установка приборной доски позволяет осуществлять внекабинную посадку по приборам в условиях плохой видимости или ночью, а данные, получаемые с камеры реального времени, обеспечивают возможность пилотирования летательным аппаратом без прямой видимости оператором летательного аппарата.
Элемент зубчатой передачи механизма обеспечивает поворотное движение, сопряженное с шестеренкой (8), в которую интегрирован датчик (17). Данный датчик преобразовывает механическое движение в электрические сигналы. Электрические сигналы преобразовываются в управляющее воздействие по каналу крена.
Работа многоканального органа управления
Многоканальный орган управления закрепляется на правом предплечье человека посредством ремней. Фиксация предплечья обеспечивается ложементом, входящим в состав конструкции.
Управление по каналу крена обеспечивается наклонами рукоятки вправо и влево (пронация/супинация). Управление по каналу тангажа обеспечивается подниманием и опусканием кисти руки относительно ее естественного положения. Управление по каналу направления курса обеспечивается отведением и приведением кисти руки «от себя/на себя».
Многоканальный орган управления соединяется с блоком сопряжения.
Зубчатый элемент механизма обеспечивает поворотное движение, сопряженное с шестеренкой, в которую интегрирован датчик. Данный датчик преобразовывает механическое движение в электрически сигналы, которые преобразовываются в управляющие воздействия по каналу крена.
Общий вид хода МОУ для осуществления управляющих воздействий по каналу крена показан на фиг. 2 и составляет ±15°. Общий вид хода МОУ для осуществления управляющих воздействий по каналу направления курса показан на фиг. 3 и составляет ±15°. Общий вид хода МОУ для осуществления управляющих воздействий по каналу тангажа показан на фиг. 4 и составляет ±15°. Общий вид хода МОУ для осуществления управляющих воздействий по каналу шаг-газ показан на фиг. 5 и составляет 20 мм.
Блок сопряжения обеспечивает считывание и обработку электрических сигналов, поступающих от датчиков многоканального органа управления. Обработка электрических сигналов проходит по четырем осям управления, которые включают в себя: канал управления тангажем, направлением курса, креном и общим шагом винта. Помимо обработки осевых каналов управления на блоке сопряжения обрабатываются сигналы с блока кнопок. Блок сопряжения способен обрабатывать до 12 программируемых кнопок и один девятипозиционный переключатель.
Многоканальный орган управления обеспечивает возможность регулировки для подгонки под индивидуальные антропометрические параметры оператора. Конструктивные элементы для осуществления регулировки показаны на фиг. 6.
31 - Диапазон регулировки для возможности подгонки расстояния центра осей вращения 2-х степеней свободы лучезапястного сустава и центральной оси обхвата кисти руки. Ход регулировки составляет 20 мм.
32 - Диапазон регулировки для возможности подгонки 2-х осевого механизма вращения относительно ложемента для обеспечения наилучшего распределения веса МОУ на предплечье оператора. Ход регулировки составляет 28 мм.
33 - Диапазон регулировки общего регулировочного положение ложемента и оси обхвата рукоятки 2-х осевого механизма вращения, которое необходимо распределять вдоль всего предплечья. Регулировка с выходом конструктивных частей за антропометрические пределы в области локтя допустима для эффективного управления. Общий регулировочный ход составляет 108 мм.
34 - Диапазон регулировки для установки рукоятки в положение, приемлемое для совершения управляющих воздействий. Ход регулировки составляет 40 мм.
35 - Диапазон регулировок при помощи регулировочных спиц МОУ, позволяющий осуществлять подгонку конструктивного положения ремней, закрепляющих МОУ на предплечье оператора, для обеспечения максимальной устойчивости при осуществлении управляющих воздействий. При закреплении МОУ непосредственно на коже или легкой одежде оператора управляющие воздействия по каналу крена могут сопровождаться движением мягких тканей, а вместе с ними и всего МОУ. Данное движение допустимо ввиду того, что общий ход механизма по каналу крена составляет 30°, общий ход мягких тканей составляет 35°-45°, а возможность вращения предплечья составляет 130°-160°, что дает возможность осуществлять управляющие воздействия в полном объеме. Для предотвращения движения мягких тканей предплечья оператора необходимо закреплять многоканальный орган управления на объемной одежде или дополнительным конструктивным элементом на плече. Ход регулировки составляет 60 мм.
Для подключения многоканального органа управления к блоку сопряжения используется разъем ШР, штекер и розетка. Данный разъем оборудован конструктивным элементом шип-паз для предотвращения ошибочного подключения и не требует специальных инструментов для соединения и разъединения.
Для фиксации многоканального органа управления на предплечье оператора используются ременная стропа. Фиксация происходит в двух местах, непосредственно около локтя и ближе к запястью, сразу после трехосевого механизм вращения. Для хорошего натяжения ременных строп используются пластиковые замки, которые обеспечивают индивидуальную антропометрическую подстройку под диаметр предплечья у основания локтевого сустава. Такие замки позволяют оперативно одевать и снимать многоканальный орган управления.
Для осуществления управляющих воздействий в многоканальном органе управления предусмотрены четыре оси управления, позволяющие перемещаться летательному аппарату по шести координатам в полной мере. Каналы тангажа, крена и направления курса изменяются по вращательной схеме, канал шаг-газ изменяется по схеме передвижения от себя, на себя, что формирует метрическое представление о положении «рычага». Движение рукоятки соответствует естественным перемещениям лучезапястного сустава оператора, что является благоприятным для формирования образа полета и переноса стереотипа навыков пилотирования посредством других органов управления. Для управления целевой нагрузкой в МОУ интегрированы кнопки, в количестве трех штук. Кнопки могут быть задействованы для любой задачи, требующей одноразовое включение или выключение, например: захват цели, отказ от захвата цели, включение/выключение специального оборудования и т.д. Возможна установка комбинированного режима кнопок - нажатие двух одновременно. Количество кнопок может быть увеличено до 12 путем дополнительных конструкций и конструктивных изменений. Установленное количество кнопок является исключительно демонстрацией возможности их установки, а также предметом для исследования совмещенной деятельности. Кинематика управляющих воздействий представлена в таблице.
Таблица - кинематика движений многоканального органа управления для осуществления управляющих воздействий по четырем осям и кнопками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| Способ интуитивного управления летательным аппаратом | 2018 |
|
RU2711770C1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| БОКОВАЯ КИСТЕВАЯ РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2164878C2 |
| Тренажер авиационный на базе беспилотного летательного аппарата | 2023 |
|
RU2820357C1 |
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2003 |
|
RU2253593C2 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| СИДЕНЬЕ ПИЛОТА | 2016 |
|
RU2610325C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |


Изобретение относится к области авиации, в частности к дистанционным средствам управления летательными аппаратами. Многоканальный орган управления летательным аппаратом состоит из ложемента, установленного на ложементе механизма управляющего воздействия по каналу крена, на который установлен регулировочный элемент установки в положение, приемлемое для совершения управляющих воздействий. На регулировочный элемент установлен механизм двухосевого вращения, обеспечивающий считывание сигналов для преобразования их в управляющее воздействие по каналу тангажа и направления курса, к которому в свою очередь присоединена рукоятка. Механизм двухосевого вращения представляет собой прямоугольную рамку, к которой присоединен нижний регулировочный элемент рукоятки для установки различного расстояния от центра лучезапястного сустава до оси обхвата рукоятки кистью руки оператора. Рукоятка выполнена с тремя кнопками, установленными на боковой поверхности, причем на верхней поверхности рукоятки установлен ползунок управления общим шагом винта. Достигается повышение безопасности и эффективности управления летательным аппаратом. 7 з.п. ф-лы, 10 ил., 1 табл.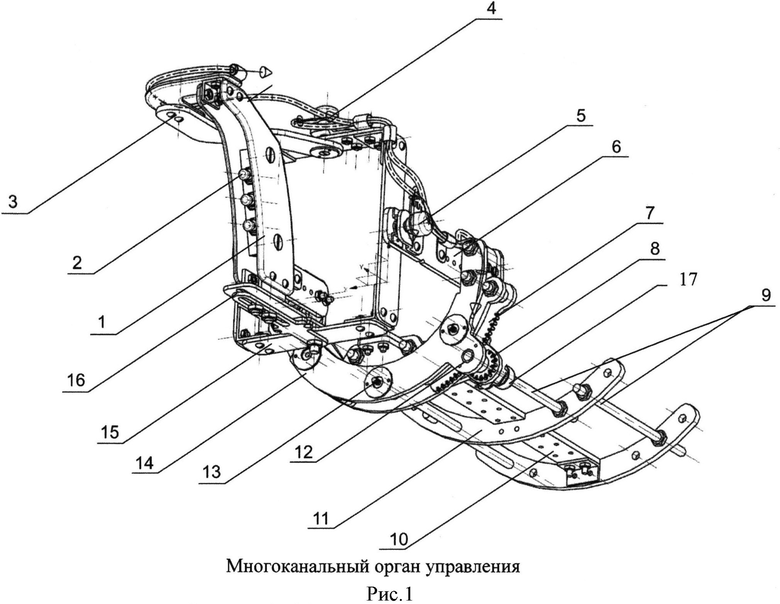
1. Многоканальный орган управления летательным аппаратом, состоящий из ложемента, установленного на ложементе механизма управляющего воздействия по каналу крена, причем на механизм управляющего воздействия по каналу крена установлен регулировочный элемент установки в положение, приемлемое для совершения управляющих воздействий, на который установлен механизм двухосевого вращения, обеспечивающий считывание сигналов для преобразования их в управляющее воздействие по каналу тангажа и направления курса, к которому в свою очередь присоединена посредством регулировочных элементов рукоятка.
2. Многоканальный орган управления по п.1, отличающийся тем, что механизм двухосевого вращения представляет собой прямоугольную рамку, к которой присоединен нижний регулировочный элемент рукоятки, для установки различного расстояния от центра лучезапястного сустава до оси обхвата рукоятки кистью руки оператора в зависимости от антропометрических особенностей оператора.
3. Многоканальный орган управления по п.1, отличающийся тем, что рукоятка выполнена с по меньшей мере тремя кнопками, установленными на боковой поверхности, причем на верхней поверхности рукоятки установлен ползунок управления общим шагом винта.
4. Многоканальный орган управления по п.1, отличающийся тем, что ложемент состоит из основной регулировочной подложки, закрепленного на ней конструктивного нагрузочного элемента регулировочных спиц и регулировочных спиц.
5. Многоканальный орган управления по п.1, отличающийся тем, что механизм управляющего воздействия по каналу крена состоит из механизма считывания сигналов от поворота лучезапястного сустава для преобразования его в управляющее воздействие по каналу крена, установленного на элементе зубчатой передачи и вала, обеспечивающего ход для механизма управления каналом крена, на который в свою очередь установлена шестеренка механизма управляющего воздействия по каналу крена, кроме того, на механизм управляющего воздействия по каналу крена установлен датчик управления каналом крена
6. Многоканальный орган управления по п.1, отличающийся тем, что крепление ложемента на предплечье руки предусмотрено путем застегивания ремней.
7. Многоканальный орган управления по п.1, отличающийся тем, что он выполнен с возможностью установки дисплеев, объединенных в приборную доску, причем на экранах дисплеев приборной доски отображается информация с камеры реального времени или данные авиационных приборов, таких как: авиагоризонт, высотометр, направление курса.
8. Многоканальный орган управления по п.7, отличающийся тем, что приборная доска выполнена складной.
| US 3028126 A, 03.04.1962 | |||
| БОКОВАЯ КИСТЕВАЯ РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2164878C2 |
| Машина для присоединения листов к переплету | 1933 |
|
SU37068A1 |
| US 2011303038 A1, 15.12.2011 | |||

