Гибридный дирижабль линзообразной формы предназначен для выполнения дальних, сверхдальних и длительных полетов с полезным, в том числе с тяжелым и нестандартным грузом, а также с пассажирами. Дирижабль относится к классу свободных управляемых аэростатических летательных аппаратов, имеющих корпус в виде круглой двояковыпуклой симметричной или несимметричной линзы, полужесткой или жесткой конструкции. Аппарат снабжен силовой установкой, где в качестве движителей использованы воздушные винты, четыре из которых создают вертикальную тягу, а еще четыре - горизонтальную. Лопасти всех винтов имеют возможность изменения угла атаки с целью управления общим шагом винтов и обеспечения управлением величиной и направлением (реверсом) тяги для выполнения режимов стабилизации в пространстве аппарата как твердого тела относительно шести степеней свободы. Полет аппарата может осуществляется с использованием аэростатической подъемной силы легкого газа (например, гелия), находящегося в его корпусе, аэродинамической подъемной силы, тяги воздушных винтов (движителей) силовой установки, а также подъемной силы нагретого воздуха, заключенного наряду с легким газом в специальные термополости внутри корпуса аппарата. Аппарат не имеет аэродинамических поверхностей управления. Управление полетом выполняется с помощью изменения величины и направления тяги винтов силовой установки, а также изменением температуры горячего воздуха внутри аппарата. Используя все четыре перечисленные способа получения подъемной силы в различных комбинациях, можно сформировать любую траекторию полета в горизонтальной и вертикальной плоскостях, включая стратосферные высоты. С целью выполнения продолжительных полетов (например, сотни дней) в стратосфере для осуществления мониторинга земной поверхности или получения и передачи информации, в том числе с больших высот, аппарат снабжен энергетической установкой на основе фотопреобразователей (солнечных батарей), аккумуляторов и топливных водородных элементов.
Известен высокоманевренный дирижабль дискообразной формы (патент Великобритании №2027403, кл. B7W 11А10, 1980 г.) В качестве движителей силовой установки на аппарате использованы четыре поворотных воздушных сопла, расположенные симметрично по периферии силового диска. На аппарате установлен газотурбинный двигатель, поток выхлопных газов которого направляется по трубам к соплам, меняющим скорость и направление истечения газа. Дирижабль не имеет аэродинамических рулей и управляется с помощью изменения величины и направления векторов тяги воздушных сопел. К недостаткам этой конструкции следует отнести сложность процесса управления тягой сопла и ограниченные углы ее отклонения.
Известен дисковый полужесткий дирижабль (патент Великобритании №2117728, кл. В64В 1/02, 1983 г.) Для управления подъемной силой и перемещения в вертикальной плоскости дирижабль снабжен системой термобалластирования. Для выполнения горизонтального полета аппарат имеет двигатели с воздушными винтами, расположенные на периферии силового кольца. К недостаткам этого аппарата следует отнести неэффективное управление полетом в вертикальной плоскости при использовании только системы термобалластирования.
Известен дискообразный дирижабль по авторскому свидетельству СССР №569097, кл. В64В 1/20, 1975 г. Его особенностью является наличие оболочки, образованной системой частично перекрывающих друг друга эластичных полос, закрепленных между силовым кольцом и верхним и нижними кольцами корпуса. Для регулирования подъемной силы предусмотрена тросовая система с лебедкой, позволяющая менять объем корпуса с отсеками, содержащими несущий газ. К недостаткам данного проекта относится наличие у аппарата аэродинамических рулей, которые неэффективны на низких скоростях полета и в режиме висения и имеют большой вес. Кроме этого, дирижабль не имеет органов управления, обеспечивающих возможность стабилизации и управления креном и тангажем на малых скоростях полета и в режиме висения.
В качестве прототипа выбран полужесткий аэростатический летательный аппарат, патент РФ №105881, кл. В64В 1/08 от 19.11.2010 г., включающий в себя линзообразный корпус с силовым каркасом, содержащим элементы, обеспечивающие сохранение его внешней формы, в том числе внешнее силовое кольцо в виде треугольной фермы; внутренние верхнее и нижнее силовые кольца; верхнюю и нижнюю мягкие оболочки, соответствующие части эллипсоида с отношением высоты к диаметру, менее 0,6, образующие внутренний объем корпуса, где установлены мягкие газовые баллоны, положение которых фиксируется внутренним такелажем, заполненные газом легче воздуха; снабженный грузовым отсеком и отсеком (кабиной) управления.
Прототип имеет ряд недостатков, основными из которых являются:
1. Нерациональное расположение винтовых движителей, не позволяющее полностью решить вопросы обеспечения управления и стабилизации аппарата относительно шести степеней свободы, в частности в направлении оси Z в плоскости XOZ аппарата, при действии внешних ветровых возмущений на режимах висения, вертикальных взлета и посадки.
2. Отсутствие системы управления, обеспечивающей выполнение полетного задания в условиях действии внешних возмущений и отказах оборудования и силовой установки, формирующей суммарный вектор тяги винтовых движителей силовой установки, обеспечивающий стабилизацию и траекторное управление движением аппарата в режимах маршрутного полета, взлета/посадки, висения и дрейфа по ветру.
3. Необходимость введения компенсации реакции аппарата (вращения вокруг оси Y) на работу четырех винтов вертикальной тяги, вращающихся в одну сторону, которую следует устранять либо с помощью винтов горизонтальной тяги, непрерывно формируя момент противоположного направления, либо применением двух вариантов редукторов двигателей винтов вертикальной тяги, расположенных попарно относительно продольной оси Х аппарата и имеющих противоположное направление вращения выходных валов, вращающих воздушные винты, путем применения вариантных редукторов между выходными валами двигателей и воздушных винтов.
4. Система энергообеспечения не позволяет совершать длительные, в том числе многомесячные полеты.
5. Аппарат не имеет системы термобалластировки, позволяющей транспортировать грузы различной величины без использования специального балласта, необходимого при выгрузке грузов.
Задача, положенная в основу настоящего изобретения, заключается в создании аэростатического летательного аппарата, свободного от недостатков прототипа и позволяющего решать задачи транспортировки грузов и/или пассажиров в любое время года и суток в любую точку земного шара, на больших высотах, включая стратосферные, эксплуатация которого может осуществляться с необорудованных площадок небольшого размера без использования наземной инфраструктуры.
Технический результат использования настоящего изобретения достигается обеспечением устойчивости и управляемости аппарата путем рациональной компоновки силовой установки и управления тягой движителей при действии управляющих и внешних (ветровых) возмущений, что приводит к увеличению безопасности полета и точному выдерживанию траектории полета, в том числе на режимах взлета и посадки.
Предлагаемый летательный аппарат имеет следующие отличия от прототипа.
1. Движители (воздушные винты) скомпонованы в четыре энергетических узла, расположенных по внешней окружности силового кольца симметрично относительно связанных осей X, Y, Z аппарата. Каждый из четырех энергетических узлов содержит движитель вертикальной тяги и движитель горизонтальной тяги. Такое расположение винтов позволяет формировать суммарный вектор тяги силовой установки, действующий в любом направлении, необходимом для управления полетом и/или компенсации влияния ветровых возмущений с любого направления с целью обеспечения режимов либо стабилизации аппарата в заданной точке пространства, либо выдерживания заданной траектории полета, в том числе при вертикальном взлете и посадке.
2. Движители (воздушные винты) горизонтальной тяги имеют дополнительную возможность поворотов вектора тяги на угол 45° относительно продольной оси Х аппарата, что позволяет создавать суммарный вектор тяги горизонтальных винтов в любом направлении горизонтальной плоскости X, Z с целью обеспечения стабилизации местоположения аппарата относительно заданной точки земной поверхности.
3. В составе силовой установки в канале вертикальной тяги применены соосные вертолетные винты. Движители (воздушные винты) вертикальной тяги выполнены в виде пары соосных вертолетных винтов, снабженных механизмом управления общим шагом лопастей и автоматом перекоса лопастей. Автомат перекоса создает дополнительную возможность стабилизации и управления аппаратом в горизонтальной плоскости без использования поворота вектора тяги горизонтальных движителей по пункту 2.
4. Применение соосных винтов в канале вертикальной тяги исключает реакцию аппарата на дестабилизирующие моменты вокруг оси Y, которые возникают при использовании несоосных винтов вертикальной тяги, что приводит к упрощению управления аппаратом по каналу курса, экономии топлива и устраняет необходимость обеспечения вращения несоосных винтов (в случае их применения) в противоположных направлениях путем использования для цели получения вертикальной тяги вариантных двигателей с вращением выходных валов в противоположных направлениях.
5. Применение фотопреобразователей в системе энергоснабжения аппарата позволяет совершать длительные стратосферные полеты на больших высотах.
6. Аппарат снабжен комплексом управления полетом, содержащим систему устойчивости и управляемости, навигационную систему, встроенную в комплекс систему контроля и диагностики. Комплекс выполнен резервированным, рассчитанным на выполнение завершения полета и безопасной посадки при возникновении любого первого отказа любого блока, агрегата и системы.
На фигуре приведена схема расположения энергетических узлов и движителей (воздушных винтов) силовой установки аппарата. Аппарат состоит из внешней, наполняемой легким газом оболочки 1, имеет внешнее силовое кольцо 5, на котором установлены энергетические узлы 2 силовой установки. Каждый из четырех узлов содержит два воздушных винта, один из которых создает вертикальную тягу 4, а второй - горизонтальную 3. Винты, создающие вертикальную тягу 3, выполнены соосными и снабжены автоматом перекоса и механизмом изменения общего шага лопастей. Применение таких винтов не приводит к появлению в полете реакции аппарата на действие возмущающих моментов (тенденция к развороту аппарата вокруг оси Y), возникающих при работе вертикальных винтов, вращающихся в одну сторону, и позволяет использовать двигатели, имеющие одинаковое направление вращения выходных валов.
Применение автомата перекоса лопастей соосных винтов позволяет обеспечить дополнительную возможность наряду с движителями горизонтальной тяги выполнение режима стабилизации положения центра тяжести аппарата в горизонтальной плоскости.
Для управления полетом и стабилизации аппарата в горизонтальной плоскости вдоль осей X, Z воздушные винты горизонтальной тяги 3 каждого энергетического узла 2 имеют возможность поворота (в том числе возможно вместе с двигателем) вокруг оси Y на угол 45 градусов. Повернутые винты показаны пунктиром, а направление их тяг - черными стрелками. Их направление позволяет формировать суммарный вектор тяги этих винтов в плоскости X, Z и осуществлять движение аппарата в любом направлении плоскости X, О, Z.
Система электроснабжения аппарата содержит фотопреобразователи с аккумуляторами и водородными топливными элементами. При выполнении полета днем фотопреобразователи снабжают электроэнергией все бортовые системы, заряжая при этом еще аккумуляторы и обеспечивая работу электролизеров, вырабатывающих водород и кислород из воды. Ночью системы и агрегаты борта обеспечиваются электроэнергией, поступающей от аккумуляторов и топливных элементов, работающих на водороде, полученном при работе электролизеров. При достаточной площади фотопреобразователей, установленных на внешней поверхности аппарата, можно с каждого квадратного метра поверхности получать электроэнергию в количестве 0,06 кВт/час.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридный дирижабль | 2024 |
|
RU2838500C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2651305C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| ТРАНСПОРТНЫЙ ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2385257C1 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
Гибридный летательный аппарат состоит из внешней, наполняемой легким газом оболочки, внешнего силового кольца, внутренних силовых колец, центрального силового кольца, силовой установки, включающей двигатели с воздушными винтами, создающими вертикальную и горизонтальную тягу. Силовая установка содержит четыре энергетических узла, каждый из которых включает двигатель с воздушным винтом, создающим вертикальную тягу, и двигатель с воздушным винтом, создающим горизонтальную тягу, и устройства, обеспечивающие управление общим шагом лопастей, перекос лопастей и реверс тяги каждого воздушного винта. Все энергетические узлы расположены по внешней окружности кольца симметрично относительно его связанных осей X, Y, Z. Изобретение направлено на стабилизацию аппарата в условиях действия внешних ветровых возмущений. 5 з.п. ф-лы, 1 ил.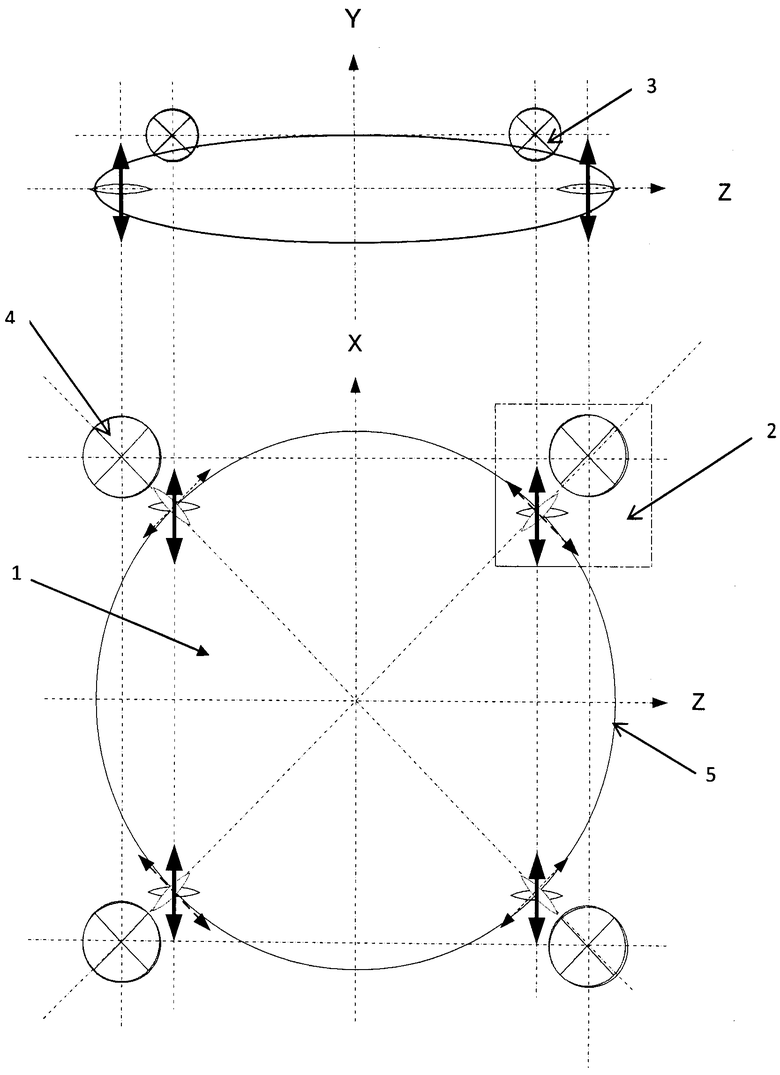
1. Гибридный летательный аппарат, состоящий из внешней, наполняемой легким газом оболочки, внешнего силового кольца, внутренних силовых колец, центрального силового кольца, силовой установки, включающей двигатели с воздушными винтами, создающими вертикальную и горизонтальную тягу, отличающийся тем, что, с целью формирования суммарного вектора тяги силовой установки, обеспечивающего стабилизацию аппарата относительно шести степеней свободы и управление его полетом по заданной траектории, в том числе на взлете и посадке в условиях действия внешних ветровых возмущений, силовая установка содержит четыре энергетических узла, каждый из которых включает двигатель с воздушным винтом, создающим вертикальную тягу, и двигатель с воздушным винтом, создающим горизонтальную тягу, и устройства, обеспечивающие управление общим шагом лопастей, перекос лопастей и реверс тяги каждого воздушного винта, при этом все энергетические узлы расположены по внешней окружности упомянутого кольца симметрично относительно его связанных осей X, Y, Z.
2. Гибридный летательный аппарат по п.1, отличающийся тем, что воздушные винты горизонтальной тяги силовой установки аппарата совместно с двигателями, обеспечивающими их вращение, имеют дополнительную возможность поворотов вектора тяги на угол 45° относительно направления продольной оси X аппарата, что позволяет создавать суммарный вектор тяги горизонтальных винтов в любом направлении горизонтальной плоскости X, Z.
3. Гибридный летательный аппарат по п.1, отличающийся тем, что энергоузлы силовой установки, содержащие в качестве исполнительных органов системы управления полетом воздушные винты, в том числе соосные винты вертикальной тяги, снабжены резервированной системой управления, рассчитанной на исправную работу после возникновения любого первого отказа.
4. Гибридный летательный аппарат по п.1, отличающийся тем, что резервированная система управления полетом построена таким образом, что позволяет выполнять оперативное вмешательство оператора наземного пункта управления в управление полетом в автоматическом дистанционном режиме или пилота в пилотируемом варианте аппарата и подхватывать и сохранять те параметры режима полета, которые были установлены пилотом либо оператором в процессе вмешательства.
5. Гибридный летательный аппарат по п.1, отличающийся тем, что бортовое оборудование летательного аппарата в своем составе имеет систему электроснабжения, содержащую фотопреобразователи - солнечные батареи, аккумуляторы и водородные топливные элементы с электролизерами.
6. Гибридный летательный аппарат по п.1, отличающийся тем, что снабжен системой термобалластирования для уравновешивания аппарата по вертикали, позволяющей загружать аппарат, перевозить груз и разгружать аппарат.
| Система возбуждения тяговых электродвигателей постоянного тока на электроподвижном составе | 1955 |
|
SU105881A1 |
| US 5351911 A1, 04.10.1994; | |||
| US 4014483 A1, 29.03.1977 | |||

