Область техники
Изобретение относится к способам измерений характеристик излучения (приема) антенн, включая измерение пространственных диаграмм направленности (ДН) слабонаправленных антенн воздушных судов (ВС) в условиях реального полета, и может быть использовано для повышения адекватности и точности измерения ДН при летных и сертификационных испытаниях радиоэлектронных средств и систем ВС различного назначения.
Уровень техники.
Одним из важнейших параметров АФУ, характеризующих их направленные свойства и функциональные возможности, является ее ДН, измерение которой в условиях полета ВС является сложной научно-технической задачей, а ее эффективное решение может быть реализовано на основе выполнения комплекса взаимосвязанных вопросов методического, алгоритмического и инструментального характера.
Общие требования к АФУ, предназначенным для установки на ВС, изложены в авиационных правилах АП-23, АП-25, АП-29 и квалификационных требованиях КТ-34-01.
Методы измерения характеристик АФУ в наземных и летных условиях регламентируются государственным стандартом «ГОСТ Р 50860 – 2009. Самолеты и вертолеты. Устройства антенно-фидерные радиосвязи, навигации, посадки и управления воздушным движением. Общие технические требования, параметры, методы измерений», включая требования на допустимые уровни неравномерности их ДН и подавление ортогональной составляющей электромагнитного поля в горизонтальной плоскости.
В настоящее время известны и используются на практике два основных способа, которые обеспечивают измерения ДН антенн самых разных типов и назначения.
Первый способ, изложенный в монографии Миклашевской А.В. «Автоматические измерители в диапазоне СВЧ». М. Связь, 1972, 167 с. и в патенте Российской Федерации «Способ измерения азимутальной диаграммы направленности антенны» № 2298198, от 27.04.2007 г. основан на последовательном изменении по азимуту и углу места углового положения исследуемой антенны, которая работает в режиме приема (излучения) относительно неподвижной измерительной антенны, которая работает в режиме излучения (приема). Амплитуда сигнала на выходе исследуемой антенны зависит от ее угловых положений относительно положения антенны источника излучения по азимуту и углу места.
К недостаткам способа можно отнести ограничение на геометрические размеры исследуемых антенн и трудности измерения ДН антенны, установленной на габаритных объектах (например, на натурном ВС).
Известны «Способ измерения диаграммы направленности приемной антенны», (Патент на изобретение № 1778714, опуб. 30.11.1992 г.) и «Способ измерения диаграммы направленности диапазонной антенны», (Патент на изобретение № 1804627, опуб.23.03. 1993 г.), которые относятся к облетным способам измерений ДН наземных антенн и включают излучение сигнала на каждой частоте рабочего диапазона с борта ЛА, совершающего полет в дальней зоне исследуемой антенны по заданной траектории, прием сигнала исследуемой и опорной антеннами, одновременное измерение амплитуд принятого сигнала и координат ЛА относительно исследуемой антенны и определение ее ДН на каждой из частот рабочего диапазона по результатам измерений уровней радиосигнала с построением ДН.
Основными недостатками облетных способов являются использование сложных технических решений с организацией дополнительного сверхвысокочастотного (СВЧ) радиоканала, а также высокие трудоемкость и стоимость проведения измерений.
Для проведения измерений ДН антенн, установленных на ВС в условиях полета, первый способ реализован применительно к измерению ДН антенн вертолета, который принципиально может выполнить разворот по азимуту на 360° в точке зависания и обеспечить условия, близкие к необходимым. Краткое описание способа приведено в информационном сообщении «Определение диаграмм направленности антенн» на сайте фирмы «Скорпио Авиа Тех» в интернете. Непосредственное использование способа для измерения ДН бортовых антенн самолета требует его существенной модификации в связи с невозможностью выполнения режима висения с выполнением разворота по азимуту на 360°.
Второй способ получил наибольшее распространение при измерении ДН бортовых антенн ВС (как самолетов, так и вертолетов), а именно способ визирования установленной на ВС антенны под различными углами по азимуту путем выполнения полета по круговой траектории (вираж) с фиксированным значением крена ВС вокруг точки, вынесенной относительно положения наземного измерительного пункта (НИП) на значительное расстояние. Способ закреплен в нормативных документах, которые используют при выполнении, как летных, так и сертификационных испытаний бортового оборудования ВС: в государственном стандарте ГОСТ Р 50860-2009 и «Типовой методике испытаний антенно-фидерных устройств бортового радиооборудования, установленного на воздушных судах ГА», ГосНИИ «Аэронавигация», ЛИИ им.М.М. Громова, Москва, 1994 г..
Из описания способа следует, что он включает ряд неучтенных методических факторов, оказывающих влияние, как на точность, так и на адекватность оценок и результирующую
погрешность измерения ДН антенн, установленных на ВС, что связано с использованием для синхронизации измеренных значений уровня радиосигнала значений углов курса, информации, передаваемой голосом по штатному речевому каналу радиосвязи ВС и построением оценок неравномерности ДН в системе координат «относительный уровень сигнала - курсовой угол НИП». Представление результатов в соответствии с «Типовой методикой...» приводит к искажениям в интерпретации оценок неравномерности ДН (при симметричных реальных ДН получают оценки с существенной асимметрией формы ДН по правому и левому бортам ВС).
Наиболее близким к заявляемому является «Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления», патент RU №2 638 079С1, опубликованный 11.12.2017 г., который принят в качестве прототипа.
Этот способ, включающий исследуемую антенну, установленную на высоте h1 в составе подвижного объекта больших размеров, измерение азимутальной ДН исследуемой антенны путем перемещения объекта на измерительном участке открытого полигона с однородной структурой поверхности (например, типовой ВПП) вокруг выбранной точки (центра) по траектории, близкой к окружности небольшого радиуса (10…30 м), излучение тестового радиосигнала заданной частоты, сформированного программируемым генератором (ПГР) и усиленного широкополосным усилителем мощности (ШУМ), через исследуемую антенну объекта, регистрируя при этом измеренные навигационной системой объекта истинный курс ψo, географическую широту ϕo, долготу λo, а также время (UTC) приемника GPS/ГЛОНАСС системой измерения объекта (СИО), прием излученного антенной объекта радиосигнала измерительными антеннами ортогональной поляризации, размещенными на высоте h2 телескопической мачты передвижного наземного измерительного пункта (НИП), установленного от центра круговой траектории объекта в диапазоне дальностей от  до
до  измерение уровня радиосигнала, анализатором спектра реального времени (АСРВ), географических широты ϕнип, долготы λнип и времени UTC его приемника GPS/ГЛОНАСС совместно с навигационными параметрами объекта регистрируют и объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, пересчет объединенных данных к фиксированным (нормированным) координатам антенны объекта, в качестве которых приняты оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, пересчет уровней напряженности радиосигнала Eri, измеренных на удалениях ri от антенн НИП, к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка,
измерение уровня радиосигнала, анализатором спектра реального времени (АСРВ), географических широты ϕнип, долготы λнип и времени UTC его приемника GPS/ГЛОНАСС совместно с навигационными параметрами объекта регистрируют и объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, пересчет объединенных данных к фиксированным (нормированным) координатам антенны объекта, в качестве которых приняты оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, пересчет уровней напряженности радиосигнала Eri, измеренных на удалениях ri от антенн НИП, к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка,
для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки установлена вспомогательная антенна, и излучение через нее тестового радиосигнала заданной частоты, прием излучаемого радиосигнала антеннами НИП, с регистрацией на фиксированном расстоянии  от вспомогательной антенны при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя:
от вспомогательной антенны при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя:

где: 
λ - длина волны радиосигнала, излучаемого антенной объекта,
определение максимального Vh2max минимального Vh2min модуляции измеренного радиосигнала и оценкой по формуле:

значения коэффициента отражения γ0 измерительной площадки, который учитывают при пересчете уровней напряженности поля Eri, измеренных на дальности ri к нормированным значениям E0i, соответствующим дальности го до центра круговой траектории, по формуле

за нормированные значения курсовых углов приняты их оценки, полученные расчетным способом по значениям курса объекта, географических координат антенны объекта в каждой точке круговой траектории и географических координат НИП, выполненные в следующей последовательности:
- расчет значения дальностей между НИП и условным центром круговой траектории объекта, а также между НИП и текущим положением объекта (приемника GPS/ГЛОНАСС) на круговой траектории ri по формулам:


где: P=6370,4912775 км;
ϕ0i, λ0i - измеренные приемником GPS/ГЛОНАСС географические координаты круговой траектории объекта;
ϕНИП, λНИП - измеренные географические координаты НИП;
 - оценки географических координат центра круговой траектории объекта;
- оценки географических координат центра круговой траектории объекта;
- расчет текущих значений курсового угла НИП в системе координат объекта по измеренным значениям географическим координатам НИП, текущих географических координат и курса объекта при его движении по круговой траектории по формулам:

где: αНИП=arctg (l/((cosϕo*tgϕНИП/sin(λo-λНИП))-sinϕНИП/tg(λo-λНИП))) азимутальный угол НИП относительно объекта;
ψo - курс объекта;
- введение при несовпадении координат антенны объекта с координатами антенны приемника GPS/ГЛОНАСС скорректированных текущих координат rik и αкуНИПk по формулам


где: xao и zao координаты антенны в связанной системе координат объекта с началом, совпадающим с координатами антенны приемника GPS/ГЛОНАСС, полученные оценки нормированных значений уровня радиосигнала для соответствующих значений курсового угла НИП, в системе координат объекта, принимают за оценку азимутальной ДН антенны объекта, которую в виде параметрической зависимости Eoi=ƒ(αкуНИП) отображают графически в линейных или полярных координатах, в линейном или логарифмическом масштабах.
К недостаткам способа прототипа относятся невозможность его непосредственного неполного набора навигационных параметров регистрируемых на ВС, необходимых для обеспечения испытаний, а также отсутствие методик и алгоритмов обработки результатов измерений с обеспечением коррекции методических погрешностей оцениваемых параметров ДН, в условиях полета ВС и приведения результатов измерений к нормированным условиям.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в повышении адекватности интерпретации результатов измерений и уменьшении погрешностей оценок ДН антенн радиотехнических систем ВС, при проведении различных этапов летных (сертификационных) испытаний, за счет совершенствования технологии испытаний, использования методик измерений, обработки и интерпретации экспериментальных данных, обеспечивающих приведение результатов измерений к нормированным условиям с оценкой
пространственной ДН бортовой антенны в условиях полета ВС во всем диапазоне рабочих углов по азимуту и углу места, при сокращении объема и стоимости испытаний.
Осуществление изобретения.
Для получения указанного технического результата в предлагаемом способе измерения пространственной ДН антенны ВС в условиях полета, включающем установку исследуемой антенны на высоте h1 в составе подвижного объекта больших размеров, измерение азимутальной ДН исследуемой антенны путем перемещения объекта на измерительном участке открытого полигона с однородной структурой поверхности (например, типовой ВПП) вокруг выбранной точки (центра) по траектории, близкой к окружности небольшого радиуса (10…30 м), излучение тестового радиосигнала заданной частоты, сформированного программируемым генератором (ПГР) и усиленного широкополосным усилителем мощности (ШУМ), через исследуемую антенну объекта, регистрируя при этом измеренные навигационной системой объекта истинный курс ψo, географическую широту ϕo, долготу λo, а также время (UTC) приемника GPS/ГЛОНАСС системой измерения объекта (СИО), прием излученного антенной объекта радиосигнала измерительными антеннами ортогональной поляризации, размещенными на высоте h2 телескопической мачты передвижного наземного измерительного пункта (НИП), установленного от центра круговой траектории объекта в диапазоне дальностей от до измерение уровня радиосигнала, анализатором спектра реального времени (АСРВ), географических широты ϕнип, долготы λнип и времени UTC его приемника GPS/ГЛОНАСС совместно с навигационными параметрами объекта регистрируют и объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, пересчет объединенных данных к фиксированным (нормированным) координатам антенны объекта, в качестве которых приняты оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, пересчет уровней напряженности радиосигнала Eri, измеренных на удалениях ri от антенн НИП, к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки установлена вспомогательная антенна, и излучение через нее тестового радиосигнала заданной частоты, прием излучаемого радиосигнала антеннами НИП, с регистрацией на фиксированном расстоянии от вспомогательной антенны при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя:
где:
λ - длина волны радиосигнала, излучаемого антенной объекта,
определение максимального Vh2max минимального Vh2min модуляции измеренного радиосигнала и оценкой по формуле:
значения коэффициента отражения γ0 измерительной площадки, который учитывают при пересчете уровней напряженности поля Eri, измеренных на дальности ri к нормированным значениям E0i, соответствующим дальности го до центра круговой траектории, по формуле
за нормированные значения курсовых углов приняты их оценки, полученные расчетным способом по значениям курса объекта, географических координат антенны объекта в каждой точке круговой траектории и географических координат НИП, выполненные в следующей последовательности:
- расчет значения дальностей между НИП и условным центром круговой траектории объекта, а также между НИП и текущим положением объекта (приемника GPS/ГЛОНАСС) на круговой траектории ri по формулам:
где: P=6370,4912775 км;
ϕ0i, λ0i - измеренные приемником GPS/ГЛОНАСС географические координаты круговой траектории объекта;
ϕНИП, λНИП - измеренные географические координаты НИП;
- оценки географических координат центра круговой траектории объекта;
- расчет текущих значений курсового угла НИП в системе координат объекта по измеренным значениям географическим координатам НИП, текущих географических координат и курса объекта при его движении по круговой траектории по формулам:
где: αНИП=arctg (l/((cosϕo*tgϕНИП/sin(λo-λНИП))-sinϕНИП/tg(λo-λНИП))) азимутальный угол НИП относительно объекта;
ψo - курс объекта;
- введение при несовпадении координат антенны объекта с координатами антенны приемника GPS/ГЛОНАСС скорректированных текущих координат rik и αкуНИПk по формулам
где: xao и zao координаты антенны в связанной системе координат объекта с началом, совпадающим с координатами антенны приемника GPS/ГЛОНАСС, полученные оценки нормированных значений уровня радиосигнала для соответствующих значений курсового угла НИП, в системе координат объекта, принимают за оценку азимутальной ДН антенны объекта, которую в виде параметрической зависимости Eoi=ƒ(αкуНИП) отображают графически в линейных или полярных координатах, в линейном или логарифмическом масштабах, до начала испытательных полетов по измерению ДН антенны проводят калибровку испытательной трассы полетов путем измерения коэффициента отражения поверхности γ0 в районе размещения НИП по формуле (1), оценивают прогнозные значения высоты полета hвс и удаления r0 условного центра круговых траекторий (ЦКТ) ВС от НИП на основе прогнозных оценок по формуле (2) интерференционного множителя отражения радиосигнала на трассе «НИП - ЦКТ» на заданных рабочих частотах испытываемой антенны, выполняют калибровочные полеты ВС на прогнозной высоте hвс по прямолинейной траектории, проходящей через координаты НИП и ЦКТ с излучением тестового сигнала заданной частоты через антенну ВС в диапазоне дальностей ri, от ro-50 км до ro+50 км, при этом, минимальная дальность ro-50 км должна быть  а фактический уровень сигнала на входе антенн НИП на этой дальности должен превышать значение чувствительности приемных трактов НИП не менее, чем на 20 дб, Измерение и регистрацию в ЭВМ НИП зависимости уровня Ei радиосигнала от дальности ri, для реализации большого динамического диапазона выполняют в дБ, измеренные зависимости уровня калибровочного радиосигнала от дальности сглаживают путем аппроксимации полиномом второй степени
а фактический уровень сигнала на входе антенн НИП на этой дальности должен превышать значение чувствительности приемных трактов НИП не менее, чем на 20 дб, Измерение и регистрацию в ЭВМ НИП зависимости уровня Ei радиосигнала от дальности ri, для реализации большого динамического диапазона выполняют в дБ, измеренные зависимости уровня калибровочного радиосигнала от дальности сглаживают путем аппроксимации полиномом второй степени

значения калибровочных поправок к уровням радиосигнала, измеренного на дальностях ri траектории полета ВС, для их приведения к нормированному значению дальности ro рассчитывают по формуле

угловое положение испытываемой антенны относительно НИП изменяют путем выполнения полетов по круговым траекториям при постоянных значениях высоты полета hвс, положительных (отрицательных) значениях углов крена +γ (-γ) и изменением курса на 360° вокруг условного ЦКТ, удаленного от НИП на расстояние ro, значения высоты полета hвс и удаления ro от НИП определяют по результатам прогноза и калибровки трассы полета, дискретные значения углов крена ВС задают в рабочем диапазоне углов γ=±(i*Δγ), i=0.1…n с шагом Δγ≤10°, через испытываемую антенну на заданной частоте излучают тестовый радиосигнал, который принимают одновременно две линейно поляризованные логопериодические измерительные антенны НИП, которые обеспечивают неизменную ДН на вертикальной и горизонтальной поляризациях в широком диапазоне частот и развязку по поляризациям не менее 20 дБ, радиосигнал с выходов антенн измеряют АСРВ в дБ и регистрируют совместно с временем UTC приемника GPS/ГЛОНАСС в ПЭВМ из состава НИП, данные, зарегистрированные системами измерений НИП и ВС, синхронизируют по единому времени в базе данных ПЭВМ НИП, уровни радиосигнала, измеренные на заданной частоте в каждой точке полета ВС, пересчитывают к условному ЦКТ, с координатами соответствующими оценкам средних значений координат  по всем круговым траекториям полета ВС, при этом, указанную коррекцию относительных изменений уровня радиосигнала выполняют в следующей последовательности:
по всем круговым траекториям полета ВС, при этом, указанную коррекцию относительных изменений уровня радиосигнала выполняют в следующей последовательности:
• за счет изменения дальности «ВС-НИП» r0
- по формулам (4) оценивают значения дальности г0 между ВС и НИП», и текущих дальностей ri между центром круговых траекторий ВС и НИП, при этом в качестве координат объекта ϕ0i, λ0i, принимают измеренные приемником GPS/ГЛОНАСС географические координаты ϕ0BCi, λ0BCi круговой траектории ВС;
- по формулам (8) и (9) оценивают поправки для приведения уровней радиосигнала к нормированной дальности r0, а значение нормированного уровня радиосигнала в дБ определяют по формуле

• за счет изменения угла визирования ВС антеннами НИП по азимуту
- по формулам (5) определяют текущие значения αНИПВС=αНИП+π азимутального угла ВС относительно НИП и азимутального угла ЦКТ относительно НИП по формуле αЦКТ=αНИПВС при значениях 
- изменение амплитуды в дБ на выходе логопериодических измерительных антенн НИП при изменении азимутальных углов визирования ВС в диапазоне Δα=±30° относительно ее максимума ДН с высокой точностью аппроксимируют полиномами второй степени,

максимумы их ДН направляют в центр круговых траекторий, а учет модуляции уровня радиосигнала ДН измерительных антенн НИП выполняют путем вычисления поправки к измеренному уровню радиосигнала по формуле (11), при этом оценку уровня радиосигнала с учетом коррекции за счет изменения дальности и модуляции ДН измерительных антенн определяют по формуле

для всех Δαi=αНИПЦКТ-αНИПBCi, измеренных на круговой траектории ВС, путем пересчета измерений в связанную систему координат ВС с использованием соотношений для расчета:
курсового угла НИП

где: αНИП=arctg(l/((cosαBC*tgϕНИП/sin(λBC-λНИП))-sinϕНИП/tg(λBC-λИКП))), угла визирования НИП

где: βBC=-arctg(hBC/rГ)
горизонтальной дальности между НИП и ВС

где=6370,4912775 км
наклонной дальности между НИП и ВС

и приведения значений уровней сигнала, измеренных при текущих значениях параметров полета ВС, к значениям параметров, которые используются при совместной обработке и оценке пространственной ДН, интерполируют результаты измерений уровней сигналов для каждой круговой траектории с дискретным шагом (обычно ≈1,0°) как по азимуту, так и по углу визирования НИП испытываемой антенной ВС с формированием двумерного нормированного массива данных, при этом объединенные результаты измерений, полученные при полетах по всем круговым траекториям, используют для табличного и графического отображения пространственной ДН антенны ВС в полярных (прямоугольных) координатах и оценки ее пространственной неравномерности по формуле:


где: Emax и Emin - максимальное и минимальное значения уровней сигналов в (дБ) вертикальной (вп) и горизонтальной (гп) поляризаций соответственно, а среднее значение уровня подавления ортогональной составляющей поля по формуле:

для всего диапазона угловых положений бортовой антенны относительно НИП.
Кроме того, для оценки при минимальном объеме эксперимента пространственной ДН испытываемой антенны ВС в связанной системе координат ВС выполняют один левый и один правый вираж с постоянным значением крена, равным γ=0,5*arctg(hвс/rГ), результаты измерений, полученные при выполнении правого и левого виражей, нормируют, и формируют новые массивы путем объединения измеренных значений уровней радиосигнала в диапазоне изменения курсовых углов НИП от 0 до 180 градусов при выполнении левого виража с оценками уровней радиосигнала в диапазоне изменения курсовых углов НИП от 180 до 360 градусов при выполнении правого виража, и наоборот, что обеспечивает получение оценок в двух зонах (освещения и затенения) ДН испытываемой бортовой антенны максимально близких к нулевым значениям углов визирования источника радиосигнала НИП, а также их максимальное соответствие оценкам неравномерности ДН, которые получают при испытаниях антенн ВС в наземных условиях.
Предлагаемое изобретение поясняется следующими чертежами.
На фигуре 1 показана схема выполнения виражей с отрицательным - а) и положительным - б) значениями углов крена γ при экспериментальной оценке ДН бортовых антенн ВС методом полета по круговой траектории на заданном удалении rг от КП; - в) изменение углов визирования НИП при выполнении правого и левого виражей с постоянными кренами +10° и -10°;
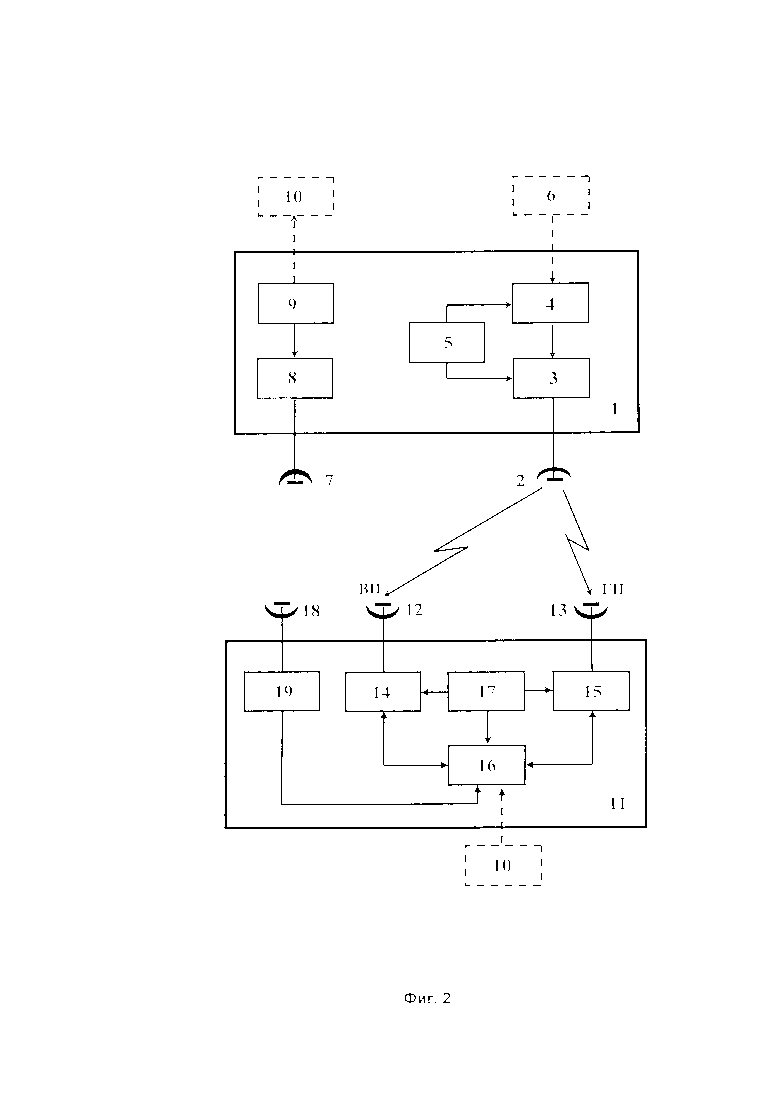
На фигуре 2 показана структурная схема последовательности выполнения процедур для реализации предлагаемого способа:
1 - ВС с испытываемой антенной;
2 - испытываемая антенна;
3 - широкополосный усилитель мощности (ШУМ);
4 - программируемый генератор (синтезатор) ВЧ радиосигналов (ПРГ);
5 - аккумулятор;
6 - подключаемая ПЭВМ для программирования режимов работы синтезатора;
7 - антенна GPS/ГЛОНАСС приемника из состава навигационной системы ВС;
8 - GPS/ГЛОНАСС приемник из состава навигационной системы ВС;
9 - навигационная система ВС;
10 - бортовая система регистрации навигационной информации ВС;
11 - наземный измерительный пункт (НИП);
12 - измерительная приемная антенна НИП вертикальной поляризации (ВП);
13 - измерительная приемная антенна НИП горизонтальной поляризации (ГП);
14 - анализатор спектра реального времени сигнала антенны ВП (АСРВ);
15 - анализатор спектра реального времени сигнала антенны ГП (АСРВ);
16 - ПЭВМ обработки и регистрации измерений параметров НИП;
17 - устройство электропитания измерительных датчиков НИП;
18 - антенна GPS/ГЛОНАСС приемника из состава НИП;
19 - GPS/ГЛОНАСС приемник из состава НИП.
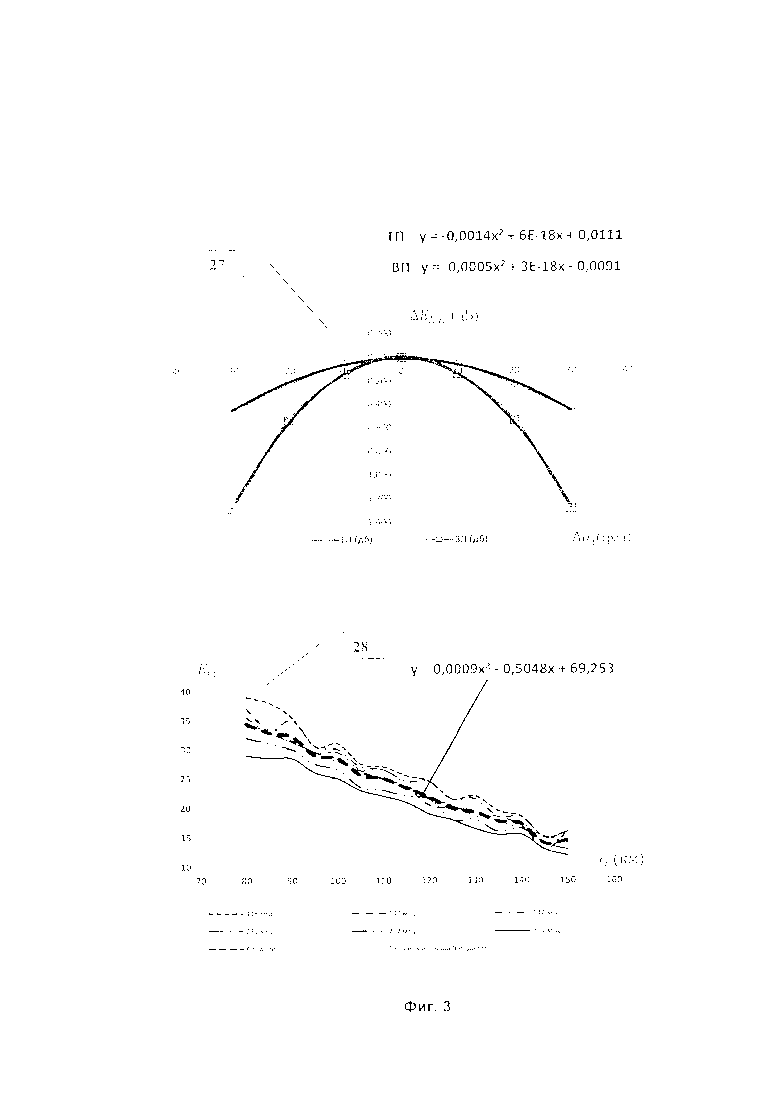
На фигуре 3 показаны примеры применения предложенных алгоритмов и качества сглаживания экспериментальных данных с использованием квадратичного полинома:
а) при аппроксимации ДН логопериодической антенны из состава НИП (CLP 5130-1);
б) при аппроксимации экспериментальных результатов измерения зависимостей уровня от частоты радиосигнала и дальности между НИП и ВС;
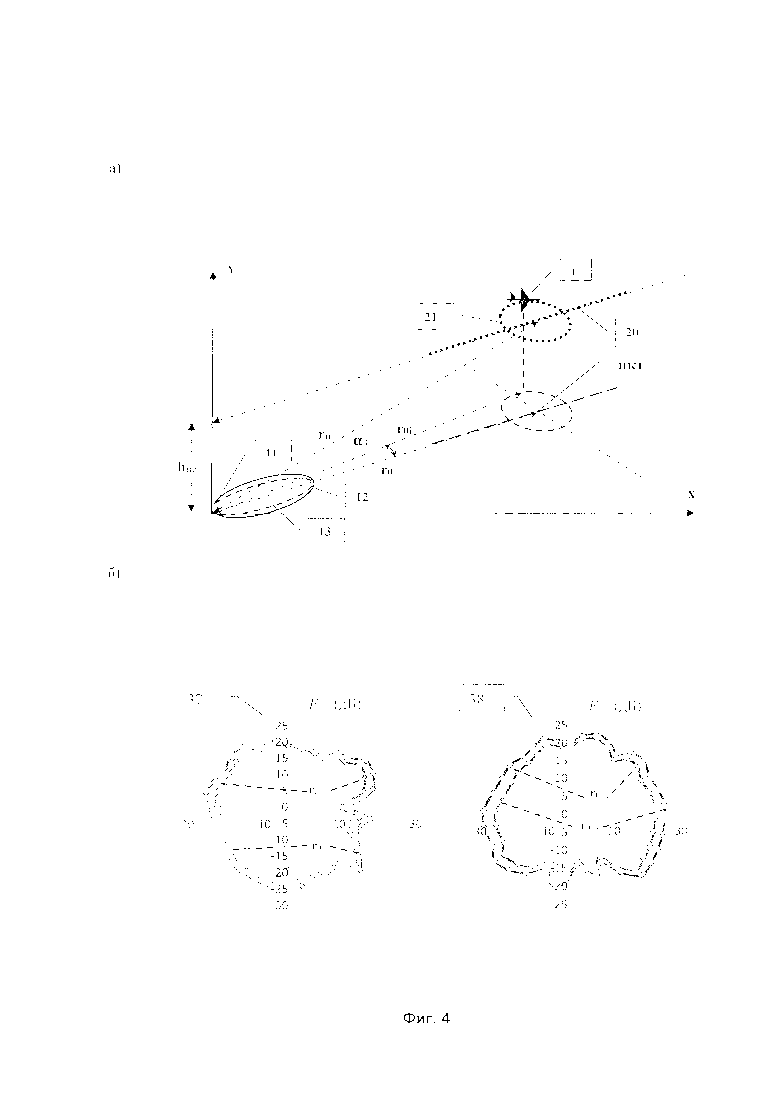
На фигуре 4 представлены:
а) схема выполнения экспериментов при выполнении полетов по прямолинейной калибровочной траектории и измерительного полета по круговой траектории, где обозначено:
- 20 прямолинейная калибровочная траектория,
- 21 измерительная круговая траектория,
- 22 ДН измерительной антенны ВП в горизонтальной плоскости,
- 23 ДН измерительной антенны ГП в горизонтальной плоскости,
- 24 центр круговых траекторий (ЦКТ);
б) результаты обработки экспериментальных измерений ДН двух антенн ВС и их коррекции с использованием технологии, заявленной в способе;
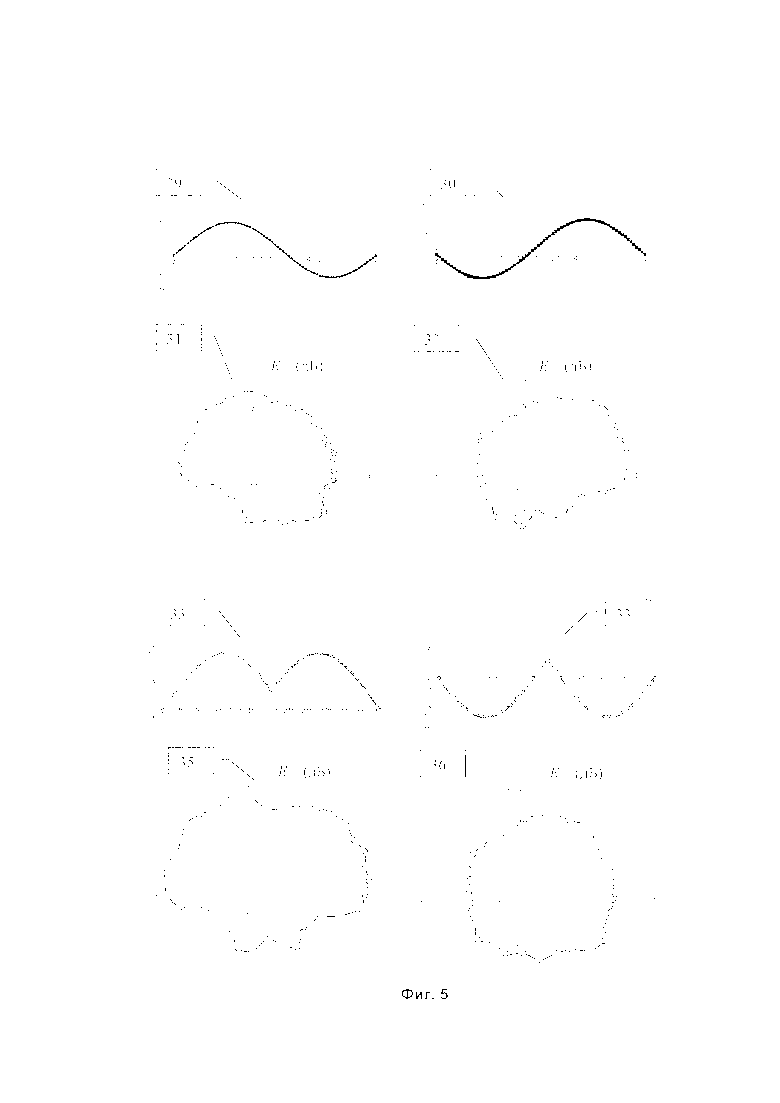
На фигуре 5 представлены экспериментальные результаты обработки измерений ДН антенны ВС при минимальном объеме эксперимента (при выполнении по одной круговой траектории с правым креном +10° и левым креном -10°):
- а) измеренные ДН и соответствующие зависимости углов визирования НИП от КУР;
- б) результаты обработки с оценками ДН по предложенным алгоритмам при наличии и отсутствии затенения испытываемой антенны элементами конструкции ВС с соответствующими зависимостями углов визирования НИП от КУР;
Заявленный способ измерения пространственных ДН антенн ВС в условиях полета осуществляют следующим образом.
На ВС 1 устанавливают ПРГ4 и ШУМ 3, с использованием подключаемой ПЭВМ 6 в ПРГ4 задают выбранные значения испытательных частот тестового радиосигнала в рабочем диапазоне исследуемой антенны 2. Выход ПРГ 4 подключают ко входу ШУМ 3, а выход ШУМ 3 соединяют с входом испытываемой антенны 2.
В соответствии с формулой 
где: - hвс и h2 - высоты испытываемой (высота полета ВС) и измерительных антенн НИП,
- λ - длина волны,
определяют минимальное расстояние от выбранного ЦКТ 24 до места установки НИП 11. ВС 1 выполняет взлет, набор заданной высоты hвс и полет на постоянной высоте по прямолинейной (калибровочной) траектории, проходящей через координаты НИП 11 и ЦКТ 24. После набора высоты hвс в начале прямолинейного участка траектории включают ПРГ 4 и ШУМ 3, с выхода которого тестовый радиосигнал излучают через испытываемую антенну 2 как при полете по прямолинейной (калибровочной), так и по круговым траекториям 21 вокруг выбранного ЦКТ с постоянными значениями крена γвс
Одновременно с началом излучения тестового радиосигнала включают бортовую систему измерений 10, которая в течение полета регистрирует параметры полета с навигационной системы 9 ВС1: географические широту (ϕ) и долготу (λ), высоту полета hвс, курс (ψ), крен (γ), тангаж (υ) и время (UTC) бортового приемника GPS/ГЛОНАСС 8.
При подготовке к выполнению испытательного полета после размещения НИП 11 на испытательной площадке полигона на расчетном удалении r0 от ВС 1 в его системе измерений фиксируют (регистрируют): географические координаты: широту (ϕнип) и долготу (λнип), высоту h2 установки измерительных антенн 12,13, которые измеряют GPS/ГЛОНАСС 19 приемником из состава НИП 11. В систему обработки данных НИП 11 заносят также значения фактических параметров ее измерительных антенн 12, 13: угловые положения максимумов их ДН по азимуту (αo), уравнения аппроксимации сечений ДН антенн в азимутальной плоскости Fгп(α) и Fвп(α), а также высоту h2 установки антенн над уровнем земли.
Тестовые радиосигналы, излучаемые через испытываемую антенну 2, поступают на вход приемных антенн 12,13 НИП 11, с выхода которых АСВР 14,15 измеряет уровни радиосигналов на всех излучаемых частотах и регистрируют их на жестком диске ПЭВМ 16 совместно с временем UTC приемника GPS/ГЛОНАСС 19 в течение всего испытательного полета. При этом оператор НИП 11 обеспечивает контроль частотной панорамы АСВР 14,15 и помечает маркерами фрагменты регистрируемых данных, при наличии перекрытия спектра измеряемого тестового радиосигнала со спектрами внешних мешающих радиосигналов для исключения этих фрагментов из последующей обработки.
Зарегистрированные системами измерений ВС 1 и НИП 11 данные объединяют в базе данных ПЭВМ 16 из состава НИП 11 на основе единого времени UTC, для каждой круговой траектории, полученной при фиксированном значении крена, результаты измерения уровня в зависимости от курсового угла НИП 11 интерполируют и приводят измерения всех реализаций к одинаковым дискретным значениям с постоянным шагом (обычно достаточно величины шага 1,0°) для реализации их последующей совместной обработки.
После выполнения полетов по заданным (круговым) траекториям вокруг выбранного ЦКТ и регистрации результатов измерений на борту ВС и на НИП проводят совместную обработку объединенных данных с приведением результатов измерений к нормированным условиям (коррекции) и их пересчетом в систему координат исследуемой антенны (связанную систему координат ВС) на основе использования формул (13…19). Полученные нормированные оценки пространственных ДН исследуемой антенны 2 и уровней подавления сигналов ортогональной поляризации документируют в табличной и графической формах.
Таким образом, заявленный способ измерения ДН антенны в составе подвижного объекта больших размеров обеспечивает:
- измерение направленных свойств испытываемой антенны в составе ВС в условиях полета ВС, что актуально для оценки ДН антенн ВС, так как позволяет измерить «реальные» ДН антенн при штатном размещении в составе ВС с учетом взаимного влияния всей совокупности бортовых антенн и элементов конструкции фюзеляжа;
- получение оценок пространственных ДН бортовых антенн в связанной системе координат ВС для всего рабочего диапазона изменений угловых положений относительно НИП, обеспечивающих адекватную интерпретацию результатов испытаний;
- возможность оценки пространственной ДН антенн ВС при значениях углов визирования НИП, близких к условиям измерения азимутальных ДН антенн в наземных условиях, что позволяет определить соответствие полученных оценок при наземных и летных испытаниях;
- определение степени подавления испытываемой антенной ВС ортогональной составляющей излучаемого (принимаемого) радиосигнала для всех рабочих значений угловых положений ВС относительно НИП на основе одновременного измерения уровней как основной, так и ортогональной составляющих электромагнитного поля антенны ВС;
- синхронизацию параметров, измеряемых на борту ВС и на наземном НИП, по времени UTC их приемников GPS/ГЛОНАСС, с реализацией совместной послеполетной обработки без организации специальных радиоканалов передачи синхросигналов;
- уменьшение погрешностей оценок пространственной ДН антенн в составе ВС в условиях полета до 2…3 дБ и упрощение интерпретации полученных результатов на основе приведения измерений к нормированным условиями коррекции методических погрешностей измерения уровня радиосигнала, обусловленных изменением дальности «ВС-НИП» и его модуляцией ДН измерительных антенн при полетах ВС по круговым траекториям;
- возможность реализации заявленного способа испытаний при минимальном составе инструментальных средств при упрощении летного эксперимента за счет независимого проведения измерительных процедур, выполняемых на борту ВС и НИП в процессе испытательного полета.
Основные измерительные процедуры и алгоритмы обработки, изложенные в заявленном способе, прошли экспериментальную апробацию при выполнении летных испытаний бортовых антенн ряда отечественных самолетов, при которых подтверждена их работоспособность, эффективность и реализуемость на основе промышленных измерительных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления | 2016 |
|
RU2638079C1 |
| Способ измерения коэффициента отражения радиосигналов УКВ (ДМВ) от земной поверхности в задачах лётных испытаний авиационных радиосистем | 2024 |
|
RU2836591C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2004 |
|
RU2279100C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| Способ измерения уровня радионаблюдаемости и устройство для его реализации | 2020 |
|
RU2750133C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения | 2017 |
|
RU2678371C2 |
| Радиофлюктуационный способ измерения пространственной диаграммы направленности слабонаправленных приёмных и передающих антенн бортовых радиостанций и бортового пилотажно-навигационного оборудования воздушного судна в лётных условиях | 2022 |
|
RU2799625C1 |
Изобретение относится к способам измерений характеристик излучения (приема) антенн, включая измерение пространственных диаграмм направленности (ДН) слабонаправленных антенн воздушных судов (ВС) в условиях реального полета, и может быть использовано при летных и сертификационных испытаниях радиоэлектронных средств и систем ВС различного назначения. Технический результат заключается в повышении адекватности результатов измерений и уменьшении погрешностей оценок ДН антенн радиотехнических систем ВС при проведении различных этапов летных (сертификационных) испытаний. При реализации заявленного способа измерений ДН антенн в условиях полета ВС выполняют прогнозную оценку относительного изменения уровня сигнала между антенной НИП и исследуемой антенной ВС на калибровочном отрезке прямолинейного горизонтального полета, включающего зону выполнения виражей; определяют значения дальностей и высоты полета ВС, при которых уровень сигнала между антенной НИП и исследуемой антенной ВС изменяется монотонно и превышает чувствительность измерительных каналов НИП не менее чем на 20 дБ; выполняют прямолинейный горизонтальный полет, измеряя уровень радиосигнала на выходах измерительных антенн ортогональных поляризаций НИП, в зависимости от дальности между НИП и ВС; по измеренной зависимости уровня радиосигнала от дальности на прямолинейной траектории выбирают координаты ЦКТ, вокруг которого выполняют полеты ВС по круговым траекториям. После выполнения полетов по заданным траекториям и документирования результатов измерений на борту ВС и на НИП проводят их совместную обработку с формированием объединенных данных по времени UTC приемников GPS/GLONAS систем измерений ВС и НИП и приведением результатов измерений к нормированным условиям по дальности и азимутальному углу в системе координат исследуемой антенны (связанной системе координат ВС), результаты оценки пространственной ДН и уровней подавления ортогональных составляющих поля испытываемой антенны ВС в табличной и графической формах документируют в полярных (прямоугольных) координатах для всего диапазона угловых положений испытываемой антенны ВС относительно НИП. 1 з.п. ф-лы, 5 ил.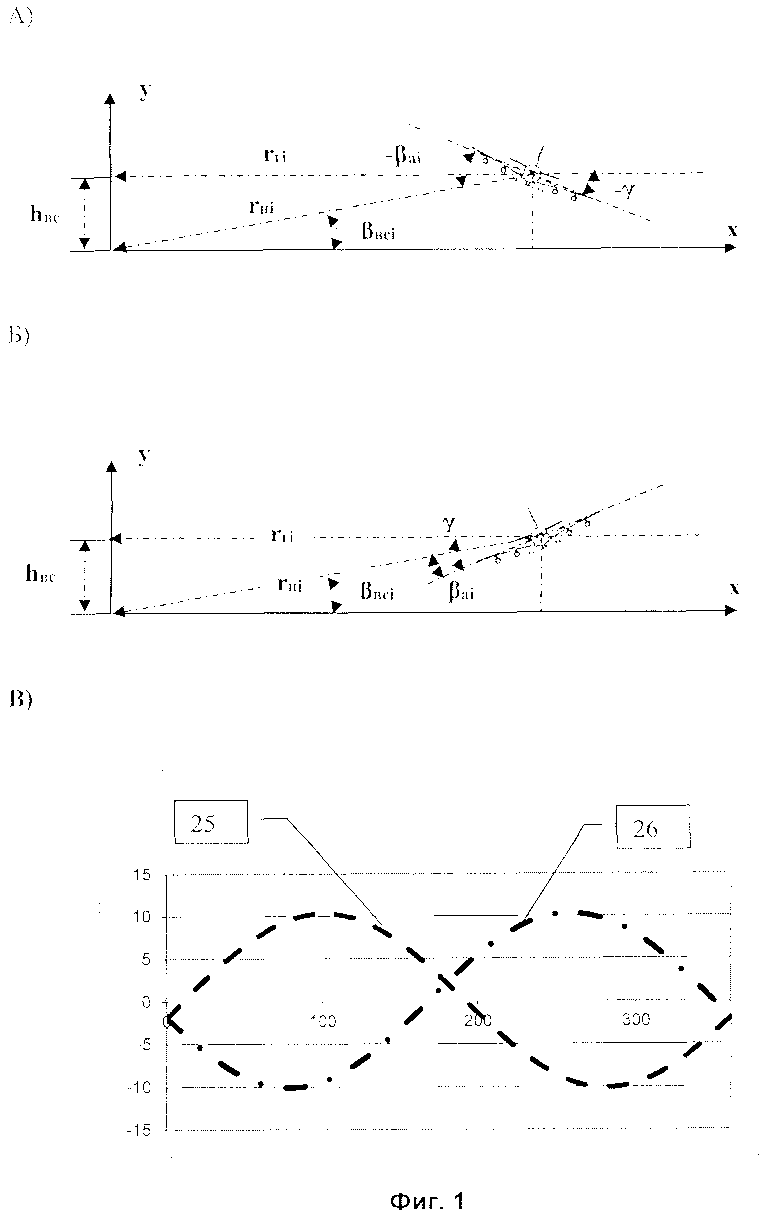
1. Способ измерения пространственной диаграммы направленности (ДН) антенны воздушного судна (ВС) в условиях полета, включающий установку исследуемой антенны на высоте h1 в составе подвижного объекта больших размеров, измерение азимутальной ДН исследуемой антенны путем перемещения объекта на измерительном участке открытого полигона с однородной структурой поверхности (например, типовой ВПП) вокруг выбранной точки (центра) по траектории, близкой к окружности небольшого радиуса (10…30 м), излучение тестового радиосигнала заданной частоты, сформированною программируемым генератором (ПГР) и усиленного широкополосным усилителем мощности (ШУМ), через исследуемую антенну объекта, регистрируя при этом измеренные навигационной системой объекта истинный курс ψо, географическую широту ϕо, долготу λо, а также время (UTC) приемника GPS/ГЛОНАСС системой измерения объекта (СИО), прием излученного антенной объекта радиосигнала измерительными антеннами ортогональной поляризации, размещенными на высоте h2 телескопической мачты передвижного наземного измерительного пункта (НИП), установленного неподвижно на расстоянии от  до
до  от центра круговой траектории объекта, измерение уровня радиосигнала, анализатором спектра реального времени (АСРВ), географических широты ϕнип, долготы λнип и времени UTC его приемника GPS/ГЛОНАСС совместно с навигационными параметрами объекта регистрируют и объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, пересчет объединенных данных к фиксированным (нормированным) координатам антенны объекта, в качестве которых приняты оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, пересчет уровней напряженности радиосигнала Eri, измеренных на удалениях ri от антенн НИП, к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки установлена вспомогательная антенна, и излучение через нее тестового радиосигнала заданной частоты, прием излучаемого радиосигнала антеннами НИП с регистрацией на фиксированном расстоянии
от центра круговой траектории объекта, измерение уровня радиосигнала, анализатором спектра реального времени (АСРВ), географических широты ϕнип, долготы λнип и времени UTC его приемника GPS/ГЛОНАСС совместно с навигационными параметрами объекта регистрируют и объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, пересчет объединенных данных к фиксированным (нормированным) координатам антенны объекта, в качестве которых приняты оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, пересчет уровней напряженности радиосигнала Eri, измеренных на удалениях ri от антенн НИП, к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки установлена вспомогательная антенна, и излучение через нее тестового радиосигнала заданной частоты, прием излучаемого радиосигнала антеннами НИП с регистрацией на фиксированном расстоянии  от вспомогательной антенны при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя
от вспомогательной антенны при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя

где λ - длина волны радиосигнала, излучаемого антенной объекта, определение максимального Vh2max и минимального Vh2min уровней модуляции измеренного радиосигнала и оценка по формуле

значения коэффициента отражения γ0 измерительной площадки, который учитывают при пересчете уровней напряженности поля Eri, измеренных на дальности ri к нормированным значениям E0i, соответствующим дальности r0 до центра круговой траектории, по формуле
за нормированные значения курсовых углов приняты их оценки, полученные расчетным способом по значениям курса объекта, географических координат антенны объекта в каждой точке круговой траектории и географических координат НИП, выполненные в следующей последовательности:
- расчет значения дальностей между НИП и условным центром круговой траектории объекта, а также между НИП и текущим положением объекта (приемника GPS/ГЛОНАСС) на круговой траектории ri по формулам


где Р=6370,4912775 км;
ϕ0i, λ0i - измеренные приемником GPS/ГЛОНАСС географические координаты круговой траектории объекта;
ϕНИП, λ НИП - измеренные географические координаты НИП;
 - оценки географических координат центра круговой траектории объекта;
- оценки географических координат центра круговой траектории объекта;
- расчет текущих значений курсового угла НИП в системе координат объекта по измеренным значениям географических координат НИП, текущих географических координат и курса объекта при его движении по круговой траектории по формулам

где  азимутальный угол НИП относительно объекта;
азимутальный угол НИП относительно объекта;
ψ0 - курс объекта;
- введение при несовпадении координат антенны объекта с координатами антенны приемника GPS/ГЛОНАСС скорректированных текущих координат rik и αкуНИПk по формулам


где хао и zao - координаты антенны в связанной системе координат объекта с началом, совпадающим с координатами антенны приемника GPS/ГЛОНАСС, полученные оценки нормированных значений уровня радиосигнала для соответствующих значений курсового угла НИП, в системе координат объекта, принимают за оценку азимутальной ДН антенны объекта, которую в виде параметрической зависимости Eoi=ƒ(αкуНИП) отображают графически в линейных или полярных координатах, в линейном или логарифмическом масштабах, отличающийся тем, что до начала испытательных полетов по измерению ДН антенны ВС проводят калибровку испытательной трассы полетов путем измерения коэффициента отражения поверхности γ0 в районе размещения НИП по формуле (1), оценивают прогнозные значения высоты полета hвс и дальности до условного центра круговых траекторий ВС от НИП на основе прогнозных расчетов по формуле (2) интерференционного множителя отражения радиосигнала на трассе «НИП - центр круговых траекторий» на заданных рабочих частотах радиосигнала, излучаемого антенной ВС, выполняют калибровочные полеты ВС на прогнозной высоте hвс по прямолинейной траектории, проходящей через координаты НИП и центра круговых траекторий с излучением тестового сигнала заданной частоты через антенну ВС в диапазоне дальностей ri, от ro-50 км до ro+50 км, при этом минимальная дальность ro-50 км должна быть  , на которой фактический уровень сигнала на входе антенн НИП превышает значение чувствительности приемных трактов НИП не менее чем на 20 дБ, измерение и регистрацию в ЭВМ НИП зависимости уровня Ei радиосигнала от дальности ri, для реализации большого динамического диапазоне их измеряют в дБ, измеренные зависимости уровня калибровочного радиосигнала от дальности сглаживают путем аппроксимации измерений полиномом второй степени
, на которой фактический уровень сигнала на входе антенн НИП превышает значение чувствительности приемных трактов НИП не менее чем на 20 дБ, измерение и регистрацию в ЭВМ НИП зависимости уровня Ei радиосигнала от дальности ri, для реализации большого динамического диапазоне их измеряют в дБ, измеренные зависимости уровня калибровочного радиосигнала от дальности сглаживают путем аппроксимации измерений полиномом второй степени

значения калибровочных поправок к уровням радиосигнала, измеренного на дальностях ri траектории полета ВС, для их приведения к нормированному значению дальности ro рассчитывают по формуле

угловое положение испытываемой антенны относительно НИП изменяют путем выполнения полетов по круговым траекториям при постоянных значениях высоты полета hвс, положительных (отрицательных) значениях углов крена +γ(-γ) и изменением курса на 360° вокруг условного центра, удаленного от НИП на расстояние ro, значения высоты полета hвс и удаления ro от НИП определяют по результатам прогноза и калибровки трассы полета, дискретные значения углов крена ВС задают в рабочем диапазоне углов γ=Δ(i*Δγ), i=0.1…n с шагом Δγ≤10°, при этом через испытываемую антенну на заданной частоте излучают тестовый радиосигнал, который принимают одновременно две линейно-поляризованные широкополосные логопериодические измерительные антенны НИП вертикальной и горизонтальной поляризации, обеспечивающие практически неизменную ДН в широком диапазоне частот и поляризационную развязку между ними не менее 20 дБ, радиосигнал с выходов антенн измеряют АСРВ в дБ и регистрируют совместно с временем UTC приемника GPS/ГЛОНАСС в ПЭВМ из состава НИП, данные, зарегистрированные системами измерений НИП и ВС, синхронизируют по единому времени в базе данных ПЭВМ НИП, уровни радиосигнала, измеренные на заданной частоте в каждой точке  ,
,  полета ВС, пересчитывают к условному центру круговых траекторий, с координатами, равными оценкам средних значений координат
полета ВС, пересчитывают к условному центру круговых траекторий, с координатами, равными оценкам средних значений координат  ,
,  по всем j круговым траекториям полета ВС, при этом указанную коррекцию относительных изменений уровня радиосигнала выполняют в следующей последовательности:
по всем j круговым траекториям полета ВС, при этом указанную коррекцию относительных изменений уровня радиосигнала выполняют в следующей последовательности:
• за счет изменения дальности «ВС-НИП»
- по формулам (4) оценивают значения дальностей r0 между ВС и НИП», а также ri между центром круговых траекторий ВС и НИП, при этом в качестве координат объекта, ϕ0i, λ0i, принимают измеренные приемником GPS/ГЛОНАСС координаты ϕ0BCi, λ0BCi круговой траектории ВС;
- по формулам (8) и (9) оценивают поправки для приведения уровней радиосигнала к нормированной дальности r0, а значение нормированного уровня радиосигнала в дБ определяют по формуле

• за счет изменения угла визирования ВС антеннами НИП по азимуту
- по формулам (5) определяют текущие значения αНИПВС=αНИП+π азимутального угла ВС относительно НИП и азимутального угла ЦКТ относительно НИП по формуле αЦКТ=αНИПВС при значениях 
- изменение амплитуды в дБ на выходе логопериодических измерительных антенн НИП при изменении азимутальных углов визирования ВС в диапазоне Δα=±30° относительно ее максимума ДН с высокой точностью аппроксимируют полиномами второй степени,

максимумы их ДН направляют в центр круговых траекторий, а учет модуляции уровня радиосигнала ДН измерительных антенн НИП выполняют путем вычисления поправки к измеренному уровню радиосигнала по формуле (11), при этом оценку уровня радиосигнала с учетом коррекции за счет изменения дальности и модуляции ДН измерительных антенн определяют по формуле

для всех Δαi=αНИПЦКТ-αНИПBCi, измеренных на круговой траектории ВС, путем пересчета измерений в связанную систему координат ВС с использованием соотношений для расчета:
курсовой угол НИП

где αНИП=arctg(1/((cosϕВС*tgϕНИП/sin(λВС-λНИП))-sinϕНИП/tg(λВС-λИКП))) угол визирования НИП

где βВС=-arctg(hВС/ri)
горизонтальная дальность между НИП и ВС

где Р=6370,4912775 км,
наклонная дальность между НИП и ВС

и формируют двумерный нормированный массив данных, который используют для графического отображения пространственной ДН антенны ВС в полярных (прямоугольных) координатах и оценки ее неравномерности по формулам


где Emax и Emin - максимальное и минимальное значения уровней сигналов в (дБ) вертикальной (вп) и горизонтальной (гп) поляризаций соответственно,
а среднего значения уровня подавления ортогональной составляющей поля по формуле

для всего диапазона угловых положений антенны ВС относительно НИП.
2. Способ измерения пространственной диаграммы направленности антенны воздушного судна в условиях полета по п.1, отличающийся тем, что для оценки ДН испытываемой бортовой антенны при минимальном объеме эксперимента выполняют один левый и один правый вираж с постоянным значением крена, равным γ=0,5*arctg (hвс/rг), результаты измерений, полученные при выполнении правого и левого виражей, нормируют и формируют новые массивы путем объединения измеренных значений уровней радиосигнала в диапазоне изменения курсовых углов НИП от 0 до 180 градусов при выполнении левого виража с оценками уровней радиосигнала в диапазоне изменения курсовых углов НИП от 180 до 360 градусов при выполнении правого виража, и наоборот, что обеспечивает получение оценок ДН испытываемой антенны в двух зонах, максимально близких к нулевым значениям углов визирования источника радиосигнала ИП, а также их наилучшее приближение к оценкам азимутальных ДН, которые получают при испытаниях антенн ВС в наземных условиях.
| Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления | 2016 |
|
RU2638079C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 1984 |
|
SU1309741A1 |
| Способ измерения диаграммы направленности диапазонной антенны | 1990 |
|
SU1804627A3 |
| JP 9178790 A, 11.07.1997 | |||
| JP 2009147687 A, 02.07.2009 | |||
| JP 2003315397 A, 06.11.2003. | |||

