Изобретение относится к области радиолокации, в частности к способам определения параметров траектории движения объектов, и может быть использовано в алгоритмах сопровождения целей радиолокационными станциями (РЛС), осуществляющими последовательный круговой или секторный обзор пространства.
Известен комплексный способ определения координат и параметров траектории движения авиационно-космических объектов, наблюдаемых группировкой станций слежения [1].
Недостатками данного способа-аналога являются, во-первых, необходимость наличия группировки станций слежения и межстанционных дуплексных каналов информационной связи, во-вторых, сложность синхронизации группировки станций при необходимости обзора пространства.
Кроме того, известен способ определения параметров траектории движения воздушных целей в обзорных РЛС [2, с.303].
К недостаткам этого способа-аналога относятся, во-первых, большое время, затрачиваемое на оценку параметров траектории движения цели, во-вторых, низкая точность определения параметров траектории движения цели при малом количестве обзоров пространства.
Наиболее близким к предлагаемому изобретению (прототипом) является способ определения параметров траектории движения (радиальной Vrt и тангенциальной vτt скоростей) воздушных целей (ВЦ) за один обзор пространства методом инверсного синтезирования апертуры антенны (ИСА) путем когерентного накопления отраженных от цели эхо-сигналов и специальной обработки этих сигналов [3], основанный на выполнении следующих операций (фиг.1):
1. Прием сигнала от цели в процессе обзора пространства РЛС:

где  - текущее значение диаграммы направленности антенны (ДНА) в направлении на ВЦ; βц - азимут ВЦ; β(nTи)=2π(1-nTи/Tобз); n - номер зондирующего сигнала;
- текущее значение диаграммы направленности антенны (ДНА) в направлении на ВЦ; βц - азимут ВЦ; β(nTи)=2π(1-nTи/Tобз); n - номер зондирующего сигнала;  ; N=int{Tобз/Tи}; int{.} - символ вычисления целого значения от выражения {.}; Тобз - период обзора пространства; Ти - период следования импульсов; tΛ - время задержки эхо-сигнала от локальных центров рассеивания (ЛЦР); λ - длина волны излучения; rkt=kΔr - дальность до ВЦ, находящейся в k-м
; N=int{Tобз/Tи}; int{.} - символ вычисления целого значения от выражения {.}; Тобз - период обзора пространства; Ти - период следования импульсов; tΛ - время задержки эхо-сигнала от локальных центров рассеивания (ЛЦР); λ - длина волны излучения; rkt=kΔr - дальность до ВЦ, находящейся в k-м  элементе разрешения по дальности Δr,
элементе разрешения по дальности Δr,  (rmax - максимальная граница зоны обзора РЛС по дальности), и состоящей из
(rmax - максимальная граница зоны обзора РЛС по дальности), и состоящей из  ЛЦР;
ЛЦР;  - номер обзора пространства; ΨΛ - фаза переотражения и начальная фаза в момент tΛ;
- номер обзора пространства; ΨΛ - фаза переотражения и начальная фаза в момент tΛ;  - аддитивная смесь шума на входе аналого-цифрового преобразователя (АЦП) и шумов дискретизации и квантования принятого сигнала.
- аддитивная смесь шума на входе аналого-цифрового преобразователя (АЦП) и шумов дискретизации и квантования принятого сигнала.
Выражение (1) описывает сигнал с амплитудной и фазовой модуляцией, вызываемой изменением во времени ракурса ВЦ и перемещением в пространстве диаграммы направленности антенны (ДНА) РЛС. При этом первый множитель характеризует огибающую сигнала, второй - среднюю доплеровскую частоту, а третий - комплексный модулирующий множитель, обусловленный изменением ракурса ВЦ.
Затем производится регистрация квадратурных составляющих эхо-сигнала (1), вычисление его комплексной формы и запись в оперативное запоминающее устройство (ОЗУ).
2. Формирование G матриц опорных сигналов размером P×L×К, элементы которых определяют по формуле:

где  - номер отсчета дискретного опорного сигнала;
- номер отсчета дискретного опорного сигнала;  и
и  - значения расчетных радиальной и тангенциальной составляющих скорости ВЦ Vцt; {.} - знак множества; Δvr и Δvτ - шаги дискретизации скоростей
- значения расчетных радиальной и тангенциальной составляющих скорости ВЦ Vцt; {.} - знак множества; Δvr и Δvτ - шаги дискретизации скоростей  и
и  соответственно;
соответственно;  и L=Vrmax/Δvr - номер и максимальное количество расчетных значений скорости
и L=Vrmax/Δvr - номер и максимальное количество расчетных значений скорости  соответственно;
соответственно;  и Р=Vτmax/Δvτ - номер и максимальное количество расчетных значений скорости
и Р=Vτmax/Δvτ - номер и максимальное количество расчетных значений скорости  соответственно; Vrmax и Vτmax - максимальные значения скоростей Vrt и Vτt соответственно.
соответственно; Vrmax и Vτmax - максимальные значения скоростей Vrt и Vτt соответственно.
3. Умножение n-го принятого сигнала  на каждый элемент соответствующей матрицы опорных сигналов
на каждый элемент соответствующей матрицы опорных сигналов 
4. Формирование матрицы результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по g

5. Вычисление модуля результирующего сигнала:

6. В канале определяются индексы p0t, l0t и k0t, при которых элементы матриц Uk(n, р, l, t) принимают максимальное значение, и производится оценка дальности ВЦ как:

7. Оценивается радиальная скорость ВЦ:

8. Производится оценка тангенциальной скорости ВЦ:

9. Для текущего обзора пространства t оценивается линейная скорость ВЦ:

10. Производится расчет курсового угла ВЦ:
Недостатки способа-прототипа:
- требуется большой объем вычислительных ресурсов, пропорциональный размерности опорной функции (Nпрот=P×L×K), и высокая производительность процессора ЭВМ;
- ограничение на пропускную способность (количество ВЦ, обслуживаемых за один обзор), обусловленное ограничениями на возможности ЭВМ.
Задачей предлагаемого способа является уменьшение вычислительных затрат и увеличение пропускной способности устройства, реализующего предлагаемый способ.
Для решения поставленной задачи в способе определения параметров траектории движения объектов - радиальной Vrt и тангенциальной Vτt скоростей - за один обзор пространства, заключающемся в приеме радиолокационной станцией эхо-сигналов; регистрации их квадратурных составляющих; вычислении их комплексной формы и записи в оперативное запоминающее устройство; формировании G матриц опорных сигналов, включающих возможные параметры траектории движения объекта: дальности, радиальной и тангенциальной скоростей; формировании результирующего сигнала путем умножения принятого сигнала на соответствующий элемент матрицы опорных сигналов и суммировании G элементов полученной матрицы по  ; вычислении модуля каждого элемента матрицы результирующего сигнала и определении номеров строк p0t, столбцов l0t и k0t-го элемента дальности матрицы, при которых элементы модуля матрицы результирующих сигналов принимают максимальное значение; расчете на первом обзоре пространства радиальной и тангенциальной скоростей и дальности цели как
; вычислении модуля каждого элемента матрицы результирующего сигнала и определении номеров строк p0t, столбцов l0t и k0t-го элемента дальности матрицы, при которых элементы модуля матрицы результирующих сигналов принимают максимальное значение; расчете на первом обзоре пространства радиальной и тангенциальной скоростей и дальности цели как  ,
,  и
и  , где Δvr, Δvτ и Δr - дискреты по радиальной, тангенциальной скоростям и по дальности соответственно,
, где Δvr, Δvτ и Δr - дискреты по радиальной, тангенциальной скоростям и по дальности соответственно,  - номер обзора пространства; расчете линейной скорости
- номер обзора пространства; расчете линейной скорости  и курсового угла цели
и курсового угла цели  согласно изобретению ограничивают на следующий (t+1)-й обзор пространства количество элементов опорной функции за счет формирования строба ее параметров путем экстраполяции дальности до цели
согласно изобретению ограничивают на следующий (t+1)-й обзор пространства количество элементов опорной функции за счет формирования строба ее параметров путем экстраполяции дальности до цели  , ее курсового угла
, ее курсового угла  и радиальной
и радиальной  и тангенциальной
и тангенциальной  составляющих вектора скорости, причем центр строба определяют по формулам:
составляющих вектора скорости, причем центр строба определяют по формулам:
 ,
,
 ,
,  ,
,
 ,
,  ,
,
где Тобз - период обзора пространства,
а размеры строба по дальности, радиальной и тангенциальной скоростям цели рассчитывают по формулам:
 ,
,
 ,
,
 ,
,
где  и
и  - среднеквадратическая погрешность измерения составляющих вектора скорости
- среднеквадратическая погрешность измерения составляющих вектора скорости  и
и  соответственно.
соответственно.
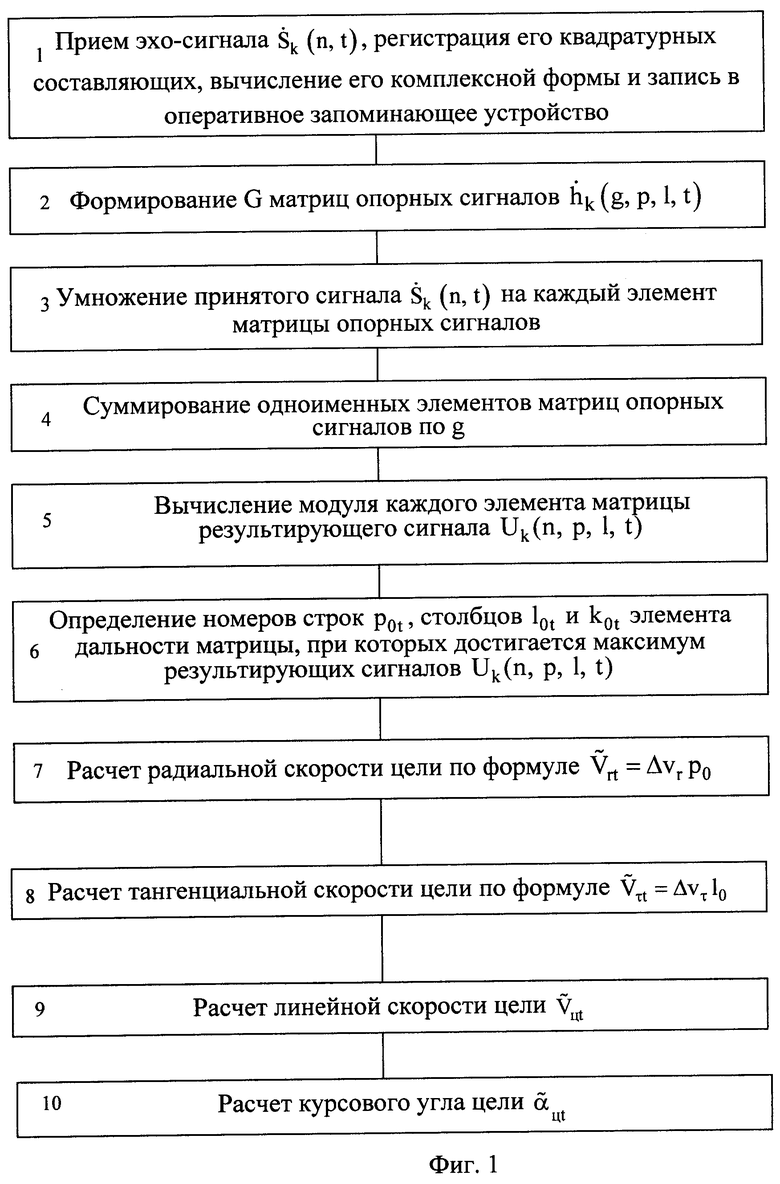
Предлагаемый способ заключается в следующем.
1. Первичная оценка параметров ( ,
,  ,
,  ) формируется исходя из выражений (1-9).
) формируется исходя из выражений (1-9).
2. Центр строба параметров опорной функции определяется в результате экстраполяции дальности до ВЦ  ее курсового угла
ее курсового угла  и составляющих вектора скорости
и составляющих вектора скорости  на следующий (t+1)-й обзор [4]:
на следующий (t+1)-й обзор [4]:
где  - оценка изменения азимута ВЦ за один обзор пространства;
- оценка изменения азимута ВЦ за один обзор пространства;  .
.
3. По результатам обработки в первом обзоре выбираются размеры строба (Δr(t+1), ΔVr(t+1), ΔVτ(t+1)) на следующий (t+1)-й обзор, которые рассчитываются следующим образом

где  и
и  - среднеквадратические погрешности измерения вектора скорости
- среднеквадратические погрешности измерения вектора скорости  и
и  , которые вычисляются по методике, представленной в [5].
, которые вычисляются по методике, представленной в [5].
4. Формирование N матриц опорных сигналов (3) размером, определяемым выражением (11), на следующий (t+1)-й обзор.
Таким образом, в предлагаемом способе определения параметров траектории движения воздушных целей в соответствии с выражениями (8-12) производится формирование границ строба по дальности, радиальной и тангенциальной скоростям при вторичной обработке радиолокационной информации (РЛИ), тем самым появляется возможность ограничения количества элементов опорной функции (3) и, как следствие, снижение требований к объему памяти и производительности процессора вычислительного устройства обзорной РЛС, увеличение пропускной способности устройства, осуществляющего предлагаемый способ, по сравнению с устройством, реализующим способ-прототип.
Новыми существенными признаками изобретения являются:
1. Экстраполяция параметров опорного сигнала по дальности, радиальной и тангенциальной скоростям (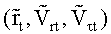 на (t+1)-й обзор пространства путем определения центра строба
на (t+1)-й обзор пространства путем определения центра строба 
2. Определение размеров строба  на (t+1)-й обзор пространства;
на (t+1)-й обзор пространства;
3. Формирование опорной функции (3) с ограничением количества элементов в соответствии с выражением (11).
При этом уменьшение объема памяти и, тем самым, снижение требований к объему вычислительных затрат и производительности процессора вычислительного устройства обзорной РЛС (выигрыша по сравнению со способом-прототипом) будет определяться как

где Nпрот=P×L×K - размерность опорной функции в способе прототипе.
С учетом зависимостей, полученных в [4, 5], после элементарных преобразований выражение (12) примет следующий вид

где Vrtmax=Vmaxcosαцt и Vτtmax=Vmaxsinαцt; q - отношение сигнал/шум на выходе приемного устройства РЛС; θβ (рад) - азимутальная ширина ДНА РЛС по уровню половинной мощности.
Оценим выигрыш предлагаемого способа.
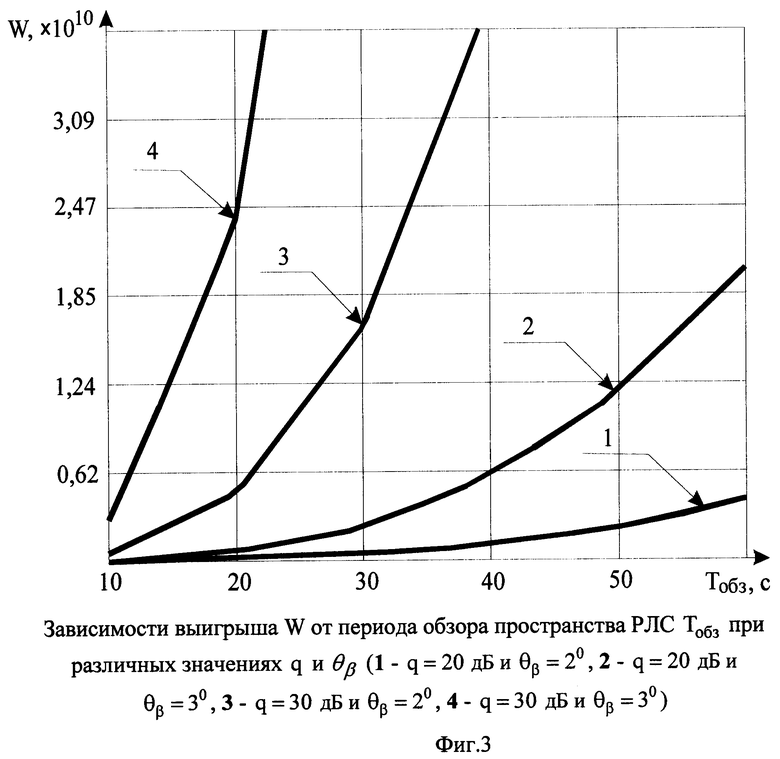
На основе выражения (13) получены графические зависимости (фиг.3) уменьшения объема вычислительных затрат W вычислительного устройства обзорной РЛС за счет реализации предлагаемого способа при λ=0,12 м; Тобз=10, 20…60 с; Vτt=254.46 м/с; Vmax=639 м/с (например, самолет тактической авиации F-4 имеет максимальную скорость 640 м/с); rtmax=360 км; rkt=20 км.
Таким образом, как видно из фиг.3, с помощью вновь введенных процедур достигается значительное уменьшение объема вычислительных затрат предлагаемым способом (количество элементов опорной функции может быть уменьшено на 9-11 порядков) и, тем самым, увеличение выигрыша по времени, затраченного на обработку полученных данных.
Следовательно, введение новых существенных признаков позволит в обзорных РЛС значительно сократить объем вычислительных затрат по сравнению со способом-прототипом.
Сущность предлагаемого способа поясняется фиг.1-3.
На фиг.1 представлена совокупность операций, составляющих сущность способа-прототипа.
На фиг.2 представлена совокупность операций, составляющих сущность предлагаемого способа.
На фиг.3 представлен график, показывающий выигрыш в объеме вычислительных затрат за счет реализации предлагаемого способа по сравнению с прототипом.
Оценка реализуемости и эффективности предлагаемого способа проводилась методом математического моделирования на ЭВМ. Операции 1-7, 11 известны, их реализация аналогична прототипу, а остальные операции можно реализовать аппаратно (на программируемых логических интегральных схемах) или программно (на ЭВМ).
Источники информации
1. Мамошин В.Р. Комплексный способ определения координат и параметров траекторного движения авиационно-космических объектов, наблюдаемых группировкой станций слежения. Патент на изобретение РФ №2279105 от 02.08.2004. Бюллетень №18 от 27.06.2006 г.
2. Бакулев П.А. // Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, 320 с.
3. Лихачев В.П., Мубарак Н.X. Способ определения параметров траектории движения воздушных целей в обзорных РЛС. Патент на изобретение РФ №2337378 от 02.07.2007. Бюллетень №30 от 27.10.2008 - прототип.
4. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов - М.: Радио и связь, 1992. - 304 с.
5. Коновалов А.Ю., Купряшкин И.Ф., Лихачев В.П. Точность оценки вектора линейной скорости цели при инверсном синтезировании апертуры антенны в условиях обзора пространства. - М.: Радиотехника. Антенны, №5, 2009. - С.65-69.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ В ОБЗОРНЫХ РАДИОЛОКАТОРАХ ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ КОГЕРЕНТНЫХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ | 2009 |
|
RU2416105C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НОСИТЕЛЯ ОБЗОРНОЙ РЛС | 2007 |
|
RU2390038C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
Изобретение относится к области радиолокации, в частности к способам обнаружения объектов и определения параметров траектории их движения, и может быть использовано при построении радиолокационных станций (РЛС), осуществляющих последовательный круговой или секторный обзор пространства за счет сканирования диаграммой направленности антенны. Достигаемым техническим результатом изобретения является уменьшение на следующем обзоре пространства размерности опорной функции, включающей возможные параметры траектории движения объекта (дальности, радиальной и тангенциальной скоростей), что значительно уменьшает вычислительные затраты, необходимые на (t+1)-й обзор, где t - номер обзора пространства, увеличивает выигрыш по времени, затраченном на обработку полученных данных, и позволяет увеличить пропускную способность устройства, осуществляющего предлагаемый способ. Указанный технический результат достигается тем, что в способе определения параметров траектории движения целей в обзорных РЛС на следующий (t+1)-й обзор определяют центр строба параметров опорной функции путем экстраполяции дальности до цели, радиальной и тангенциальной составляющих вектора ее скорости и курсового угла, рассчитывают размеры строба по дальности, радиальной и тангенциальной скоростям цели по результатам обработки сигналов в предыдущем обзоре. 3 ил.
Способ определения параметров траектории движения объектов - радиальной Vrt и тангенциальной Vτt скоростей - за один обзор пространства, заключающийся в приеме радиолокационной станцией эхо-сигналов; регистрации их квадратурных составляющих; вычислении их комплексной формы и записи в оперативное запоминающее устройство; формировании G матриц опорных сигналов (опорных функций), включающих возможные параметры траектории движения объекта: дальности, радиальной и тангенциальной скорости; формировании результирующего сигнала путем умножения принятого сигнала на соответствующий элемент матрицы опорных сигналов и суммировании G элементов полученной матрицы по
 вычислении модуля каждого элемента матрицы результирующего сигнала и определении номеров строк p0t, столбцов l0t и k0t-го элемента дальности матрицы, при которых элементы модуля матрицы результирующих сигналов принимают максимальное значение; расчете на первом обзоре пространства радиальной и тангенциальной скорости и дальности цели как
вычислении модуля каждого элемента матрицы результирующего сигнала и определении номеров строк p0t, столбцов l0t и k0t-го элемента дальности матрицы, при которых элементы модуля матрицы результирующих сигналов принимают максимальное значение; расчете на первом обзоре пространства радиальной и тангенциальной скорости и дальности цели как 
 и
и  где Δvr, Δvτ и Δr - дискреты по радиальной, тангенциальной скорости и по дальности соответственно,
где Δvr, Δvτ и Δr - дискреты по радиальной, тангенциальной скорости и по дальности соответственно,  - номер обзора пространства; расчете линейной скорости
- номер обзора пространства; расчете линейной скорости  и курсового угла цели
и курсового угла цели  отличающийся тем, что ограничивают на следующий (t+1)-й обзор пространства количество элементов опорной функции за счет формирования строба ее параметров путем экстраполяции дальности до цели
отличающийся тем, что ограничивают на следующий (t+1)-й обзор пространства количество элементов опорной функции за счет формирования строба ее параметров путем экстраполяции дальности до цели  ее курсового угла
ее курсового угла  и радиальной
и радиальной  и тангенциальной
и тангенциальной  составляющих вектора скорости, причем центр строба определяют по формулам:
составляющих вектора скорости, причем центр строба определяют по формулам:



где Тобз - период обзора пространства,  - оценка изменения азимута воздушной цели за один обзор пространства;
- оценка изменения азимута воздушной цели за один обзор пространства;  - перемещение цели за один обзор пространства;
- перемещение цели за один обзор пространства;
а размеры строба по дальности, радиальной и тангенциальной скорости цели рассчитывают по формулам:


где  и
и  - среднеквадратическая погрешность измерения составляющих вектора скорости
- среднеквадратическая погрешность измерения составляющих вектора скорости  и
и  соответственно.
соответственно.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НОСИТЕЛЯ ОБЗОРНОЙ РЛС | 2007 |
|
RU2390038C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2362182C1 |
| US 4219813 A, 26.08.1980 | |||
| US 4320287 A, 16.03.1982 | |||
| WO 2002014891 A2, 21.02.2002 | |||
| EP 328621 A, 23.08.1989. | |||

