Изобретение относится к прецизионным системам посадки самолетов. В более узком смысле оно относится к системе посадки, которая вычисляет положение самолета с использованием дистанционных измерений, базирующихся на сигналах от расположенного на борту самолета радиоответчика.
Некоторые системы, такие как используемая в настоящее время система посадки по приборам (ILS), определяют конический или пирамидальный пространственный посадочный профиль с вершиной в конце посадочной полосы. В этих системах самолет сохраняет правильную посадочную траекторию, оставаясь в центре такого объемного профиля вдоль его оси. Такие посадочные системы эффективны для управления прямолинейными посадочными траекториями, однако они приемлемы для аэропортов, в которых в силу естественных помех требуется использование криволинейных, ступенчатых или сегментных траекторий.
Прецизионная посадочная система другого типа определяет положение самолета, сравнивает его с делаемой посадочной траекторией и передает любую требуемую коррекцию на борт самолета. Такая система точно так же, как и другие системы, которые используют симметрию и упрощенные математические расчеты для определения пирамидальной посадочной траектории, описана в патенте США N 3564543.
Эта система реагирует на время, требующееся для прохождения сигнала между приземляющимся самолетом и тремя известными точками на земле для определения трех соответствующих расстояний. В ней используются запросчик и три приемоиндикатора. Во время работы запросчик передает сигнал запроса на бортовой самолетный радиоответчик. Радиоответчик в ответ на сигнал запроса передает ответный сигнал, который принимается тремя приемоиндикаторами. Каждый приемоиндикатор замеряет временной интервал между моментом детектирования сигнала запроса и моментом детектирования ответного сигнала. По этим трем интервалам времени рассчитываются соответствующие расстояния между самолетом и тремя приемоиндикаторами.
Проходит короткий временной интервал порядка нескольких микросекунд между приемом радиоответчиком сигнала запроса и последующей передачей им ответного сигнала. Этот неучитываемый интервал или "время реакции ответчика" может вызывать ошибки в определенном расчетом положении самолета порядка 100 м. В качестве побочного эффекта такое расположение требует применения высоких антенных вышек вблизи аэропорта, так как, если бы все приемоиндикаторы находились на уровне земли, т.е. в горизонтальном плане, расчетная высота самолета определялась бы со значительными погрешностями, что недопустимо для прецизионной посадочной системы.
Известна система, описанная в патенте США N 3665464. В ней замеряются интервалы времени между детектированием сигнала запроса и ответным сигналом бортового радиоответчика. В ней время реакции ответчика учитывается путем вычитания его заданного значения из замеренных интервалов времени. Однако даже задание времени реакции ответчика не исключает флуктуации замеров, т.е. вариации среднего значения времени реакции ответчика. В результате это опять ведет к значительной неточности в определении положения приземляющегося самолета.
Изобретение обеспечивает средства для повторяемого определения положения совершающего посадку самолета в реальном масштабе времени посредством применения не менее четырех приемоиндикаторов. Данное количество приемоиндикаторов дает возможность исключить ошибки, связанные с временем реакций ответчика в определении положения самолета относительно ВПН.
Согласно настоящему изобретению, по крайней мере, четыре приемоиндикатора располагаются в различных предварительно определенных точках вокруг аэропорта. Каждый приемоиндикатор настроен на детектирование сигналов радиоответчика и включает таймер, синхронизированный с другими таймерами. В ответ на детектирование сигнала радиоответчика каждый приемоиндикатор записывает время детектирования.
Прецизионная система посадки по настоящему изобретению включает центральный процессор (ЦП) 19 на базовой станции, который получает замеры времени со всех приемоиндикаторов и производит расчеты для определения положения самолета. Обычно базовая станция ЦП располагается на вышке управления полетами 14 для облегчения диспетчерского контроля, но может располагаться и в любом другом месте. Постольку используются не менее четырех независимых замеров, базовая станция ЦП может рассчитывать не только трехмерные координаты самолета, но также время реакции ответчика.
Координаты самолета сравниваются затем с математическим описанием заданной посадочной траектории. Можно использовать любую посадочную траекторию, которая поддается математическому описанию, включая траектории с криволинейными, ступенчатыми и сегментными участками. Дополнительным преимуществом является возможность использования различных предварительно заданных посадочных траекторий или одной и той же ВПП, позволяя выбрать траекторию, оптимально соответствующую посадочным характеристикам конкретного самолета.
На фиг. 1 представлен общий вид, показывающий элементы прецизионной посадочной системы согласно изобретению, расположенной вблизи аэропорта; на фиг. 2 упрощенная схема, показывающая местоположение и расстояния между элементами прецизионной посадочной системы согласно настоящему изобретению в идеальном воплощении.
Система работает следующим образом.
Обратимся теперь к фиг. 1, на котором изображен аэропорт 10 с ВПП 12 и диспетчерской вышкой 14. Система прецизионной посадки самолетов согласно настоящему изобретению направляет самолет 16 вдоль предварительно заданной траекторий 18, ведущей к ВПП. Система прецизионной посадки включает в себя множество приемоиндикаторов Rx (не менее четырех), расположенных в известных предварительно заданных местах внутри и вокруг аэропорта. Приемоиндикаторы, которые могут находиться на уровне земли (не обязательно на одном и том же), показаны в виде Т-образной конфигурации, протянувшейся под траекторией снижения 18. В идеальном исполнении приемоиндикаторы Rx1 и Rx3 удалены друг от друга на четыре километра, а приемоиндикатор Rxn располагается в двух километрах от конца ВПП. Обычно точность посадочной системы возрастает с увеличением этих расстояний до некоторого неопределенного предела. Это T-образное расположение приемоиндикаторов хотя и удобно, однако не является обязательным для правильной работы посадочной системы. Необходимым является лишь расположение приемоиндикаторов в различных местах, не лежащих на одной прямой.
Для работы посадочной системы требуются радиоответчик B, расположенный на борту самолета, и наземный запросчик Tx, расположенный в известном предварительно заданном месте. Они могут быть независимы от других приборов в аэропорту и на борту самолета или могут быть того же типа, который используется в Радиомаячной системе управления воздушным движением (ATCRBS) и радиомаячной системе с дискретной адресацией (DABS). Запросчик и ответчик работают в совместном режиме: запросчик передает сигнал запроса, который детектируется ответчиком, а ответчик, в свою очередь, передает ответный сигнал.
Приемоиндикаторы Rx1 настроены на детектирование сигналов запроса и ответных сигналов радиоответчика. Прецизионный таймер внутри каждого ответчика замеряет временной интервал между моментами детектирования этих соответствующих сигналов.
Обратимся теперь и фиг. 2. Запросчик Tx, приемоиндикатора Rx1 и радиоответчик B показаны в общем схематичном виде с указанием местоположений и расстояний, ссылки на которые делаются в следующем ниже описании. Запросчик Tx находится в месте с координатами x0, y0 и z0. Приемоиндикаторы Rx1 находятся в соответствующих позициях с координатами Xi, Yi, Zi с количеством приемоиндикаторов n. Радиоответчик на борту самолета находится в позиции с координатами X, Y, Z. Расстояния от соответствующих приемоиндикаторов Rx1 до передатчика запросчика Tx обозначены Li, расстояния от соответствующих приемоиндикаторов Rx1 до радиоответчика B обозначены di и расстояние от запросчика Tx до радиоответчика B обозначено d0.
Во время работы прецизионной посадочной системы запросчик Tx передает сигнал запроса, состоящий из модулированных на несущей частоте импульсов. Сигнал запроса принимается как приемоиндикаторами Rx1, так и радиоответчиком B. Радиоответчик B в ответ на полученный сигнал запроса передает ответный сигнал, также состоящий из импульсов, модулированных на несущей частоте. Временной интервал между приемом сигнала запроса радиоответчиком и последующей передачей им ответного сигнала принимается здесь в качестве времени реакции ответчика τ.
В идеальном исполнении каждый из приемоиндикаторов демодулирует сигнал запроса и детектирует переднюю кромку его первого импульса. Каждый приемоиндикатор также демодулирует ответный сигнал и детектирует переднюю кромку его первого импульса. Таймеры, которые имеются в каждом приемоиндикаторе, замеряют, используя передние кромки соответствующих сигналов в качестве маркеров, временной интервал, в котором каждый соответственный приемоиндикатор детектирует сигналы запроса и ответа. Результирующий временной интервал, замеренный каждым соответствующим приемоиндикатором Rxi, обозначен ti. Эти соответственно определенные интервалы времени передаются на ЦП базовой станции 19.
Функцией детектирования сигнала запроса является синхронизация таймеров приемоиндикаторов. Добавление отношения Li/c являющегося временем, необходимым для прохождения сигнала запроса до приемоиндикаторов Rx1, где c является скоростью распространения радиоволн, к соответствующим замерам времени ti эффективно включает каждый таймер в один и тот же момент, т.е. в момент передачи запросчиком Tx сигнала запроса. Другие способы передачи синхронизирующих сигналов таймерам, например, через посредство передатчика, работающего на частоте, отличной от частот запросчика или ответчика, либо по волоконно-оптической связи, дадут тот же конечный результат.
Если бы таймеры были совершенными, свободными от девиации измерителями времени, то потребовалась бы лишь одна единственная синхронизация. Однако, поскольку экономически приемлемые таймеры имеют девиацию, синхронизация по импульсу запроса имеет преимущество, поскольку она выполняется непосредственно перед приемом ответного сигнала самолетного радиоответчика, сводя к минимуму время, в течение которого таймеры должны оставаться синхронизированными.
В альтернативных исполнениях данной системы посадки приемоиндикаторы могут использовать различные методы для детектирования сигналов и замера интервалов времени. В одной из таких систем детектируются задние кромки импульсов либо вместо, либо в дополнение к передним кромкам. В другой системе для повышения точности замера времени поступления сигнала может быть использован приемоиндикатор с "согласованным фильтром" (хорошо известным в радиолокации). Еще в одной системе можно было бы использовать фазокогерентные методы для замера интервала времени между запросом и ответом.
В другом альтернативном исполнении системы приемоиндикаторы могли замерять многочисленные периоды времени внутри каждого цикла запроса-ответа. Каждый интервал начинался подобно тому, как описано выше, и различные интервалы заканчивались в момент детектирования соответствующих различных импульсов ответного сигнала. Эффект применения ответных импульсов, следующих за первым будет в этом случае аналогичным увеличению времени реакции ответчика. Эти замеры времени можно осреднить или обработать как отдельные группы замеров.
Используя эти группы интервалов времени, базовая станция ЦП рассчитывает местоположение радиоответчика B и, следовательно, самолета. Определенное расчетным путем положение самолета затем сравнивается с желаемой посадочной траекторией. Поскольку выполненное сравнение носит общий характер, оно может быть использовано для определения любой посадочной траектории, поддающейся математическому описанию. Следовательно, применение изобретенной системы не ограничивается одной единственной посадочной траекторией для каждой ВПП.
В результате сравнения положения самолета с желаемой посадочной траекторией может быть определено любое отклонение от нее. Информация о такой ошибке может быть передана на борт самолета самыми различными способами. В простейшем случае ошибка передается на дисплей воздушного диспетчера, который затем устно сообщает эту информацию пилоту.
По второму способу передачи информации пилоту об ошибке может использоваться навигационное оборудование ILS (системы посадки по приборам), которое обычно устанавливается на борту самолета. В нормальном режиме работы приборы ILS детектируют две пары сигналов. По относительной силе этих двух сигналов оборудование ILS показывает отклонение самолета от заданной посадочной траектории. Базовая станция может управлять передатчиком, передающим эти две пары сигналов различной силы таким образом, что самолетное оборудование ILS визуально воспроизводят на дисплее необходимую коррекцию.
Третий способ коммуникации может потребовать применения специального приборного оборудования на борту самолета для приема информации с базовой станции. Такое специальное приборное оборудование может визуально представить не только горизонтальные и вертикальные отклонения от посадочной траектории в аналоговом или цифровом виде, во также вывести на дисплей другие расчетные данные, такие как расстояние до ВПП, высоту, вертикальную и горизонтальную скорости.
И, наконец, базовая станция может передать команды бортовому автопилоту, который затем поведет самолет на посадку в автоматическом режиме.
Время, которое необходимо для прохождения сигнала передатчика на борт самолета, плюс время реакции ответчика и время прохождения сигнала ответчика до приемоиндикатора Rxi равняется времени, которое необходимо для прохождения сигнала передатчика до приемоиндикатора Rxi плюс интервал времени ti, замеренный приемоиндикатором. Используя переменные величины, показанные на фиг.2, можно представить сказанное выше в виде равенства:
Поскольку известны расстояния Li от запросчика Tx до соответствующих приемоиндикаторов Rxi введением новой переменной t', равной ti + Li/c, равенство (1) может быть переписано в следующем виде:
Расширение равенства (2) путем использования координат положений Tx, Rxi и B, представленных на фиг. 2:
Поскольку в ti присутствуют четыре неизвестных величины x, y, z и τ то для их определения требуется как минимум четыре приемоиндикатора в различных определенных положениях. Рассмотрим группу из четырех замеров ti для i 1, 2, 3, 4. Она образует систему из четырех нелинейных уравнений с четырьмя неизвестными, которые могут быть решены с применением техники цифрового анализа, пригодной для одновременного решения нелинейных равенств. В результате можно определить координаты самолета (x, y, z), также как и время реакции ответчика t
Поскольку время реакция ответчика t не представляет интереса, равенства могут быть упрощены применением разностей, устраняющих t. Это определит три новых величины li и систему из трех равенств, которые являются функциями трех неизвестных x, y и z. Переменная λi представляет собой разность расстояний до самолета между Rxi+1 и Rx1


Следует иметь в виду, что каждое из равенств (4 а), (4 b) и (4 c) описывает гиперболоид, более точно одну из двух поверхностей гиперболоида. Решение, определяющее местоположение самолета, находится в точке пересечения этих трех гиперболоидов. Как правило, если три выпуклых поверхности пересекаются, то они имеют две точки пересечения, поэтому будет два решения. На практике недействительное решение должно быть отброшено либо по своему физическому смыслу (например, одно из решений может быть в точке, находящейся под землей), либо другими способами.
Прецизионная система согласно настоящему изобретению в оптимальном исполнении предусматривает использование фильтрации Кальмана для повышения точности определения положения самолета. Фильтрация повышает точность не только за счет использования самых последних замеров, выполненных приемоиндикаторами, но также вследствие использования координат предыдущего положения самолета, статической надежности этого положения и статической вариации текущих измерений.
Фильтрация Кальмана в комбинации с более, чем четырьмя приемоиндикаторами обеспечивает дополнительное детектирование ошибки и устойчивость системы к неисправностям. Фильтрация Кальмана может надежно функционировать при потере данных, вызванной, например, повреждением приемоиндикатора, и обнаружить ошибки в данных с другого исправного приемоиндикатора. В любом случае фильтрация Кальмана позволяет отбросить ненадежные данные и обеспечить статистически оптимальное определение местоположения самолета на базе данных от остающихся в рабочем состоянии приемоиндикаторов. Кроме того, фильтрация Кальмана оценивает ошибку в реальном масштабе времени, что полезно для принятия решения либо приемлемости заверенной траектории, либо о выдаче команды "траектория потеряна".
Математические величины, используемые в расчетах с применением фильтрации Кальмана, приведены в таблице, где m означает размер вектора состояния, а n размер вектора измерения.
Эти матрицы используются для расчета положения самолета с использованием приведенных ниже равенств:
X(K + 1/K) Ф(K + 1,K)X(K/K) (5)
P(K + 1/K) Ф(K + 1,K)P(K/K)ФТ(K + 1/K) + Q(K) (6)
V(K + 1) Z(K + 1)- h[K + 1, X(K + 1/K)] (8)
S(K + 1) H(K + 1)P(K + 1/K)HT(K + 1) + R(K + 1) (9)
K(K + 1) P(K + 1/K)HT(K + 1)S-1(K + 1) (10)
X(K + 1/K + 1) X(K + 1/K) + K(K + 1)V(K + 1) (11)
P(K + 1/K + 1) [I K(K + 1)H(K + 1)]P(K + 1/K) (12)
В приведенных выше равенствах нотация аргумента K/j означает оценочное значение заданного параметра в промежуток времени от tk до ti. В координатах X и Z нотации аргумента (k) означают истинное значение в момент времени tk, тогда как K/j относятся к оценочному значению. Равенства (5) и (6) относятся к равенствам "уточненного времени"; равенства (11) и (12) относятся к равенствам "уточненных измерений". Матрица переходного состояния Ф. Функция измерения h и матрица измерения H обычно кодируются в фильтре Кальмана, а начальные значения вектора состояния X(0/0) и ковариационная матрица ошибки состояния P(0/0) либо рассчитываются по начальному контакту детектора, либо оцениваются эвристически. Ковариационная матрица шумов процесса Q обычно устанавливается эвристически для соответствия ожидаемым маневрам цели, но она может быть установлена применительно к наиболее современным редакциям фильтра Кальмана. Матрица R определяется по шумовым характеристикам детектора.
Основной вариант этой системы равенства является так называемой UD-формой или формой фильтра Бирмана, которая использует иной способ формирования усиления и обработки поправок ковариационной матрицы ошибки состояния P.
Вектор состояния X самолета включает положение самолета, компоненты скорости самолета и время реакции ответчика τ Вектор состояния X в матричной форме выглядит следующим образом:
Матрица переходного состояния используется в равенствах (5) и (6) для прогнозирования следующего местоположения самолета. Поскольку принимается, что идущий на посадку самолет летит без ускорения, то новые координаты это всего лишь старые величины плюс приращение времени λt при полете с прежней скоростью. Элементы скорости и время реакции ответчика не меняются.
x(k+1/k)=x(k/k)+Vx(k/k)Δt (14a)
y(k+1/k)=y(k/k)+Vy(k/k)Δt (14b)
z(k+1/k)=z(k/k)+Vz(k/k)Δt (14c)
Vx(K + 1/K) Vx(K/K) (14d)
Vy(K + 1/K) Vy(K/K) (14e)
Vz(K + 1/K) Vz(K/K) (14f)
T(K + 1/K) T(K/K) (14g)
Матрица переходного состояния, представленная в матричной форме, будет выглядеть следующим образом: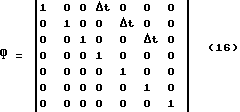
Ковариационная матрица шумов процесса Q.
Матрица переходного состояния, представленная в равенстве (15), не производит каких-либо ускорений, так же как и не позволяет отклоняться времени реакции ответчика τ Ковариационная матрица шумов процесса Q это "стареющая" матрица, которая дает возможность идти этим процессом. Обычно выбирают приблизительное значение Q и затем подстраивают его путем компьютерного моделирования или посредством полетных испытаний. Первая оценка Q обычно рассчитывается, исходя из вероятности максимального ускорения самолета. Если обозначить это ускорение а, а интервал между замерами Dt то элементы Q могут быть представлены в следующем виде:
Q44= Q55= Q66= a(Δt)2 (16b)
Qi,j 0 при i ≠ j (16с)
Остающийся элемент Q11, не определенный в равенствах (16 a) и (16 b), характеризует кратковременные изменения τ также допускает продолжительное отклонение посредством аккумулирования мелких краткосрочных изменений. Он может быть определен экспериментально или, исходя из технических характеристик ответчика.
Функция измерения h.
Каждый приемоиндикатор измеряет временной интервал (do+ di- Li)/c + τ Поскольку величины Li известны по наблюдениям для каждого варианта расположения, то интервал может быть скорректирован как показано в равенстве (2), чтобы получить функцию измерения h. При наличии n приемоиндикаторов (i 1, 2, 3, n) матрицу функции измерения h можно представить в следующем виде:
Матрица измерения H.
Матрица измерения выглядит следующим образом
где xj является элементом состояния самолета x с индексом j, а не x-положением приемоиндикатора j. Следовательно,








Ковариационная матрица ошибки измерения.
Поскольку не предполагается корреляция между приемоиндикаторами, то ковариационная матрица ошибки измерения R является диагональю Rij= δ
Функция измерения h, матрица измерения H и ковариационная матрица ошибки измерения R были определены, исходя из их применения в фильтре Кальмана с параллельной обработкой данных. Однако для специалистов в данной области конвертация этих параметров для использования в фильтре с последовательной обработкой не представит затруднений.
Фильтр приводится в исходное положение начальным радиоконтактом с самолетом. Используя замеры интервалов времени от четырех приемоиндикаторов, таких как R1, R2, R3 и Rn, можно рассчитать как положение самолета, так и время реакции ответчика также, как это описано выше в случае расчетов для четырех приемоиндикаторов. Элементы скорости вектора состояния приводятся к нулю. Если курс и скорость приближающегося самолета известны, то они могут быть использованы для инициализации элементов скорости вектора состояния X.
Субматрица P(0/0) четыре-на-четыре, соответствующая параметрам x, y, z и τ рассчитывается из матрицы R по стандартному рассеиванию ошибок:
[P(0/0)субм] H-1R(H-1)T
где H это H-матрица четыре-на-четыре, соответствующая четырем замерам, используемым для инициализации состояния.
Элементы ковариационной матрицы ошибки состояния P инициализируются заданием диагоналей с большими величинами:
P44= P55= V
P66= V
где параметры Vmax представляют собой максимальные значения, соответствующие скоростям самолета, которые выбираются на основе анализа результатов компьютерного моделирования. Вертикальная составляющая Vmax,v будет меньше горизонтальной составляющей Vmax,h.
Если для приведения скорости к начальному состоянию были использованы известные значения курса и скорости, то тогда P44, P55 и P66 следует подбирать таким образом, чтобы они отражали вариации этих цифр, которые будут зависеть от точности приборов, замеряющих данные величины, например, от точности бортовых приборов самолета.
Результирующая ковариационная матрица ошибки состояния P выглядит следующим образом:
Вектор состояния x и ковариация ошибки состояния могут быть инициализированы двумя начальными измерениями. Элементы скорости затем инициализируются в привязке к разностям позиционных элементов, деленным на Δt P(0/0) может быть получен теми же методами рассеивания ошибки.
Когда результаты многочисленных наблюдений будут обработаны фильтром Кальмана, оцениваемое значение времени реакции ответчика τ будет приближаться к константе. Если t точно известно, что соблюдаются расстояния от каждого приемоиндикатора до самолета, что предпочтительнее по сравнению с учетом просто разностей в расстояниях между приемоиндикаторами. В этом случае будет достаточно трех приемоиндикаторов для пеленгования самолета на их плоскости отражения, а наличие четвертого не копланарного приемоиндикатора устранит неоднозначность решения. Вследствие этого, как только фильтр Кальмана инициализирован близко к правильному решению, вероятность следования по ложному решению будет сведена к минимуму.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕПОДВИЖНОГО РАДИОМАЯКА С АКТИВНЫМ ОТВЕТЧИКОМ | 2012 |
|
RU2539966C2 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |


Изобретение содержит радиоответчик, не менее четырех наземных отдельно расположенных приемоиндикаторов, причем каждый содержит устройство для приема сигнала от запросчика, устройство для приема сигнала от радиоответчика, таймер, компьютер, выходное устройство для передачи сигнала на самолет. 3 с. и 12 з.п.ф-лы, 2 ил.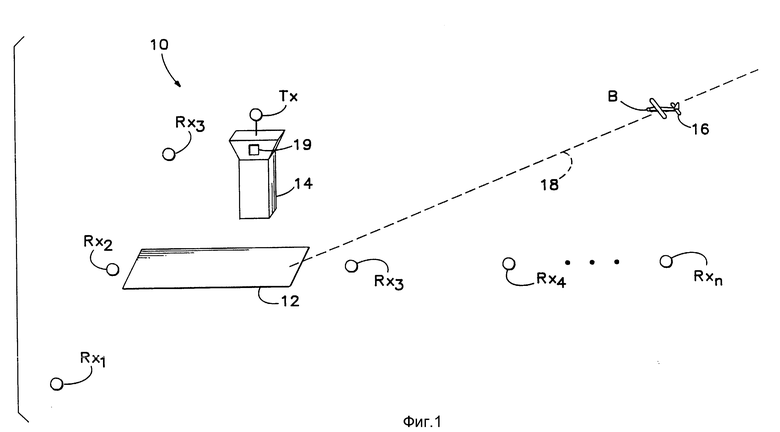
| Патент США N 3665464, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
