Область техники, к которой относится изобретение
Изобретение относится к оптоэлектронному устройству в соответствии с ограничительной частью пункта 1 формулы.
Уровень техники
Оптоэлектронное устройство данного типа известно из патента ФРГ №4405376 С1. Это устройство содержит излучающий передаваемые световые лучи передатчик и воспринимающий принимаемые световые лучи приемник, которые образуют датчик расстояния, работающий по принципу фазового измерения. Передаваемые световые лучи подвергаются отклонению в отклоняющем устройстве таким образом, что они распространяются в области контроля, лежащей в одной плоскости. Для этого отклоняющее устройство оснащено вращающимся зеркалом, на которое направляются передаваемые световые лучи и принимаемые световые лучи. С помощью датчика угла определяется положение поворотного зеркала, а следовательно, и мгновенная величина угла отклонения передаваемых световых лучей. По величинам расстояния на выходе датчика расстояния и выходным сигналам датчика угла может быть определено положение объектов в области контроля. В частности, в контрольной области может быть также определен высотный профиль объектов, верхние поверхности которых считываются передаваемыми световыми лучами. Это устройство является наиболее близким к заявляемому и принято в качестве прототипа.
В такой конструкции отклоняющее устройство с вращающимся поворотным зеркалом содержит подвижную часть относительно большой массы. Это имеет свои недостатки в особенности в тех случаях, когда устройство монтируется на рабочих агрегатах, например в наружной области. Рабочие агрегаты данного типа подвержены высоким вибрационным нагрузкам, которые могут передаваться на оптоэлектронное устройство и вызывать ложные измерения или нарушения функционирования или выход устройства из строя.
Кроме того, в этом устройстве передаваемые и принимаемые световые лучи направляются на поворотное зеркало коаксиально. Такая система имеет преимущества в том случае, когда детектированию подлежат объекты, находящиеся в непосредственной близости к устройству. Однако когда устройство выносится в наружную область для определения контуров объектов, находящихся на большем удалении от устройства, высокая чувствительность устройства в ближней области может оказаться его недостатком. Это особенно справедливо для случая, когда устройство устанавливается на рабочем агрегате, вокруг которого создается большая запыленность. Вследствие этой запыленности вокруг устройства часть передаваемых световых лучей отражается пылью обратно в устройство и вызывает искажение измеряемых величин при определении расстояния.
Сущность изобретения
Задача, на решение которой направлена настоящее изобретение, заключается в создании устройства указанного типа, по возможности нечувствительного к внешним возмущающим влияниям.
Для решения поставленной задачи предложено оптоэлектронное устройство для определения высотного профиля объекта, содержащее датчик расстояния, снабженный излучающим передаваемые световые лучи передатчиком и принимающим принимаемые световые лучи приемником, а также отклоняющее устройство, с помощью которого передаваемые световые лучи периодически отклоняются и направляются на верхнюю поверхность объекта. Высотный профиль объекта определяется в устройстве обработки данных по выходным данным датчика расстояния и по соответствующим углам отклонения передаваемых световых лучей. Отклоняющее устройство снабжено расположенной вслед за передатчиком передающей оптикой и исполнительным устройством, причем для отклонения передаваемых световых лучей передающая оптика периодически отклоняется посредством исполнительного устройства, а перед приемником размещена принимающая оптика, расположенная на некотором удалении от передающей оптики, таким образом, что оси излучения проходящих через передающую оптику передаваемых световых лучей и проходящих через принимающую оптику принимаемых световых лучей проходят на некотором удалении или с зазором друг от друга.
Существенное преимущество устройства по изобретению заключается в том, что для отклонения передаваемых световых лучей передающая оптика отклоняется посредством исполнительного устройства, и при этом передающая оптика совершает принудительно направляемое движение, нечувствительное к сотрясениям или вибрации устройства.
Еще одно преимущество состоит в том, что направляемые передающей оптикой передаваемые лучи проходят на некотором удалении от направляемых принимающей оптикой принимаемых лучей. За счет адекватного выбора базисного расстояния между передающей и принимающей оптикой устройство обладает нечувствительностью к влиянию возмущений в ближней области, и в особенности к запыленности среды вокруг оптоэлектронного устройства. Указанный эффект обусловлен тем, что благодаря расстоянию между передающей и принимающей оптикой передаваемые световые лучи, отражаемые обратно из ближней области, не попадают на приемник и не вызывают искажения измерений.
Перечень фигур чертежей
Примеры осуществления настоящего изобретения будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
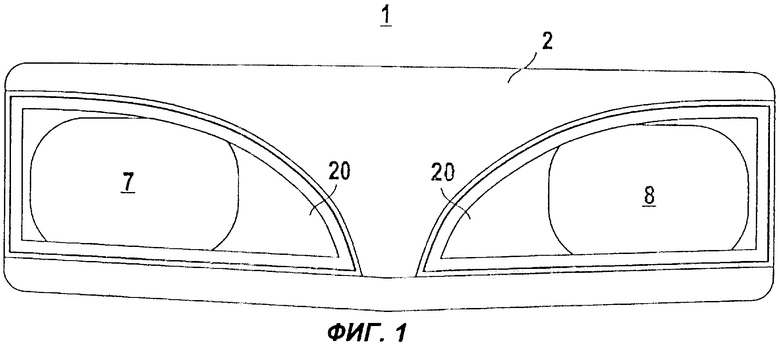
фиг.1 изображает на виде спереди расположенное в корпусе оптоэлектронное устройство в соответствии с изобретением,
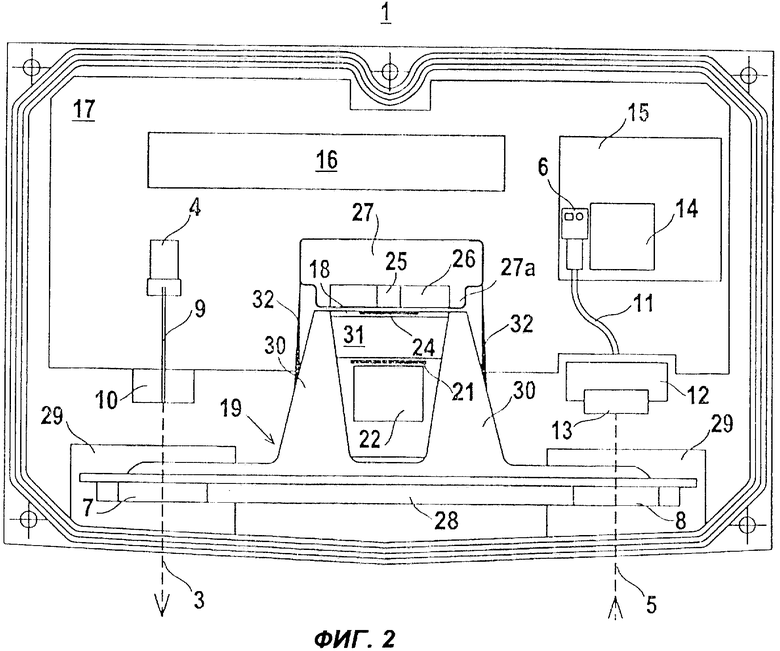
фиг.2 изображает устройство по фиг.1 на виде сверху со снятой крышкой корпуса,
фиг.3 схематично изображает в разрезе часть устройства по фиг.1 и 2,
фиг.4 изображает другой вариант выполнения исполнительного устройства,
фиг.5 изображает еще один вариант выполнения исполнительного устройства.
Сведения, подтверждающие возможность осуществления
На фиг.1 и 2 представлен пример выполнения оптоэлектронного устройства 1 для определения высотного профиля объекта. Оптоэлектронное устройство 1 предпочтительно устанавливается во внешней области, например, для определения профилей зданий, при этом оно может быть размещено на рабочем агрегате, например на транспортном средстве.
Оптоэлектронное устройство 1 смонтировано в корпусе 2, который предпочтительно изготовлен из металла и нечувствителен к механическим нагрузкам.
Отдельные оптические и электронные компоненты оптоэлектронного устройства 1 смонтированы на основании корпуса 2. Сверху корпус 2 может закрываться крышкой.
Оптоэлектронное устройство 1 снабжено датчиком расстояния, который содержит передатчик 4, излучающий передаваемые световые лучи 3, и принимающий принимаемые световые лучи 5 приемник 6. Измерение расстояния осуществляется предпочтительно по принципу измерения времени прохождения. Для этого передатчик 4 приводится в действие в импульсном режиме, так что он излучает передаваемые световые импульсы с предварительно заданным соотношением импульсов и пауз. Соответствующие отражаемые от объектов принимаемые световые импульсы попадают на приемник 6. Для измерения расстояния измеряется время прохождения направленных к объекту передаваемых световых импульсов и отражаемых объектом к приемнику принимаемых световых импульсов.
По направлению излучения передаваемых световых лучей 3 за передатчиком 4 расположена передающая оптика 7, служащая для формирования излучения передаваемых световых лучей 3. Таким же образом перед приемником 6 расположена принимающая оптика 8, которая направляет принимаемое световое излучение на приемник 6. Передающая оптика 7 и принимающая оптика 8 в данном случае образована линзой 13.
В представленном примере выполнения передаваемые световые импульсы от передатчика 4 поступают по первому оптическому волокну 9. Свободный конец оптического волокна 9 входит в металлическое гнездо 10, установленное на основании корпуса напротив передающей оптики 7 на расстоянии от нее.
Соответствующим образом от приемника 6 отходит второе оптическое волокно 11 в направлении принимающей оптики 8. Свободный конец оптического волокна 11 входит во второе металлическое гнездо 12 напротив принимающей оптики 8 на расстоянии от нее. Перед свободным концом оптического волокна 11 расположена малая линза 13, обеспечивающая оптическую связь принимающей оптики 8 с оптическим волокном 11.
Приемник 6 и приданная ему электронная система 14 обработки данных отгорожены электрическим экраном 15, предпочтительно выполненным в виде листовой штампованной детали. Принимаемые световые лучи 5 вводятся в оптическое волокно 11, при этом принимаемые световые лучи 5 в оптическом волокне 11 направляются к приемнику 6, окруженному электрическим экраном 15.
Передатчик 4, приемник 6, приданная ему электронная система 14 обработки данных, а также устройство 16 обработки данных, содержащие не представленные здесь по отдельности электронные составные части, такие как, например, микропроцессор, смонтированы на печатной плате 17, установленной на основании корпуса.
Передатчик 4 с передающей оптикой 7 и приемник 6 с принимающей оптикой 8 расположены на некотором расстоянии (с зазором) друг от друга в направлении, поперечном оси излучения передаваемых световых лучей 3 и принимаемых световых лучей 5. При этом оси светового излучения передаваемых световых лучей 3 и принимаемых световых лучей 5 проходят на предварительно заданном удалении друг от друга, так что устройство 1 нечувствительно к возмущающим влияниям в ближней области. За счет достаточно большого базисного расстояния на приемник 6 поступают только те передаваемые световые лучи 3, которые отражены объектами, находящимися на достаточно большом удалении от устройства 1.
Если устройство 1 смонтировано, например, на рабочем агрегате, который создает запыленность, то густая пыль перед устройством 1 отражает часть передаваемых световых лучей 3, однако вследствие большого базисного расстояния между передающей и принимающей оптикой 7 и 8 они не попадают к приемнику 6, так что измерение расстояния до объектов не подвергается искажающему влиянию.
Для определения высотного профиля объекта передаваемые световые лучи 3 периодически отклоняются отклоняющим устройством, так что они направляются на верхнюю поверхность объекта в пределах предварительно заданной угловой области. В описываемом примере выполнения угловая область, перекрываемая передаваемыми световыми лучами 3, составляет ±6°.
В устройстве 16 обработки данных непрерывно воспринимаются величины расстояний, поступающие от датчика расстояния, и мгновенные величины угла отклонения передаваемых световых лучей 3. По этим данным вычисляется высотный профиль объекта.
Отклоняющее устройство содержит, в основном, исполнительное устройство 18, с помощью которого производится периодическое отклонение передающей оптики 7 в горизонтальном направлении по существу поперечно оси излучения передаваемых световых лучей 3. Элементы исполнительного устройства 18 установлены на основании корпуса.
Посредством такого отклонения передающей оптики 7 производится отклонение передаваемых световых лучей 3 в горизонтальной плоскости, параллельной основанию корпуса 2.
В простейшем случае посредством исполнительного устройства 18 производится отклонение только передающей оптики 7, в то время как принимающая оптика 8 является стационарной.
В представленном примере выполнения передающая оптика 7 и принимающая оптика 8 установлены в держателе 19 и таким образом жестко связаны между собой. Держатель 19 выполнен способом литья под давлением.
Поэтому посредством исполнительного устройства 18 производится совместное отклонение передающей и принимающей оптики 7 и 8. В этом случае отклоняющее движение вызывает изменение направления передаваемых световых лучей 3 и такое же изменение направления принимаемых световых лучей 5.
В показанном примере выполнения передающая и принимающая оптика 7 и 8 расположены в одной горизонтальной плоскости на удалении друг от друга, причем оптические оси передающей и принимающей оптики 7 и 8 проходят параллельно друг другу. В принципе держатель 19 может быть расположен также таким образом, что передающая и принимающая оптика 7 и 8 будут расположены одна под другой, и тогда движение отклонения осуществляется в вертикальном направлении.
Как видно на фиг.2, передающая и принимающая оптика 7 и 8 расположены на небольшом расстоянии за выходными окнами 20 в передней стенке корпуса.
При этом размеры выходных окон 20 подобраны в соответствии с диаметром передающей и принимающей оптики 7 и 8. Кроме того, размеры выходных окон выбраны такими, что для каждой позиции передающей и принимающей оптики 7 и 8 почти вся плоскость соответствующей системы лежит напротив своего окна 20. Таким образом, лишь небольшая часть поверхностей передающей и принимающей оптики 7 и 8 перекрывается стенкой корпуса.
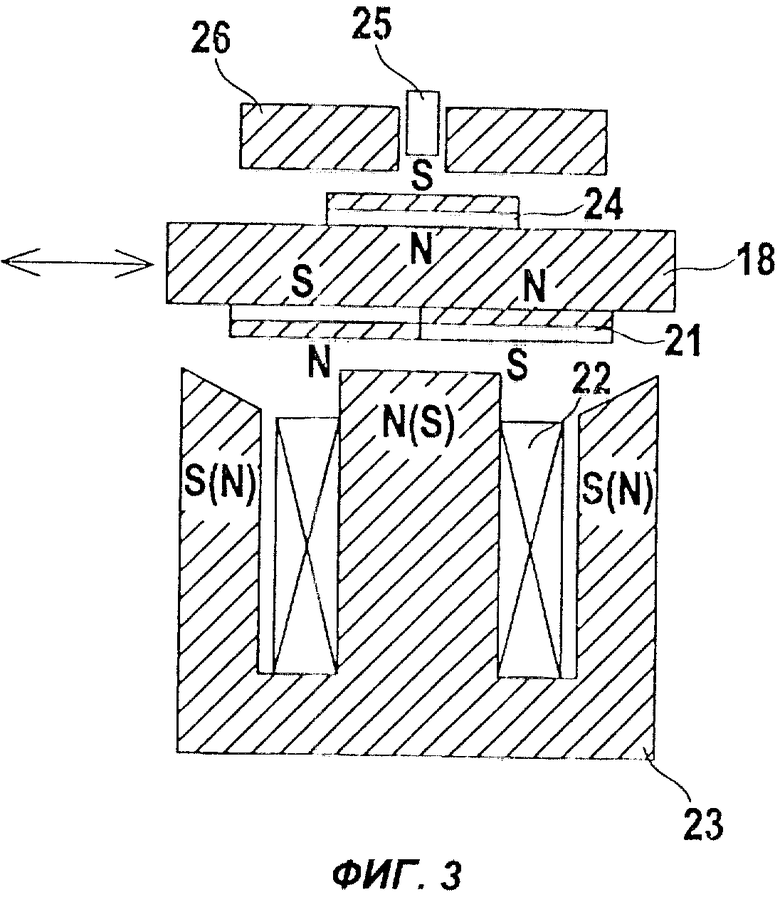
Конструкция исполнительного устройства 18 в первом примере выполнения с расположенными на держателе 19 передающей и принимающей оптикой 7 и 8 подробно показана на фиг.3.
Исполнительное устройство 18 выполнено в форме удлиненного элемента, на одной из длинных сторон которого имеется постоянный магнит 21. Эта длинная сторона исполнительного устройства 18 с постоянным магнитом 21 расположена напротив катушки 22 с железным сердечником 23. Через катушку протекает переменный по времени ток, создающий переменное магнитное поле. Для этого, как показано на фиг.3, в обращенных к исполнительному устройству 18 концах железного сердечника 23 наводится различная полярность с предварительно заданным тактом по времени. Различные полярности обозначены N и S. Как показано на фиг.3, на наружных концах железного сердечника 23 всегда наводится одинаковая полярность, а на среднем конце - противоположная полярность. За счет этого исполнительное устройство 18 периодически движется в одну или другую сторону в направлении своей продольной оси. В оптимальном варианте ток в катушке 22 регулируется с помощью цепи регулирования для получения стабильного хода исполнительного устройства 18.
На второй длинной стороне исполнительного устройства 18 расположен еще один постоянный магнит 24. Для определения действительного положения исполнительного устройства 18 его длинная сторона с постоянным магнитом 24 расположена напротив датчика 25 Холла, установленного в обойме 26, с помощью которого может определяться позиция постоянного магнита 24.
Катушка 22 с железным сердечником 23 установлена на не показанном здесь металлическом цоколе, который вертикально отходит от основания корпуса. Датчик 25 Холла установлен на металлической пластине 27 на передней стороне кронштейна 27а. Кронштейн 27а, выполненный заодно с металлической пластиной 27, укреплен перпендикулярно на основании корпуса 2.
Между кронштейном 27а с пластиной 27 и установленной на цоколе катушкой 22 с железным сердечником 23 остается промежуточное пространство, в котором движется исполнительное устройство 18. При этом длина промежуточного пространства подобрана по длине исполнительного устройства 18. Ширина промежуточного пространства немного превышает ширину исполнительного устройства 18.
На датчике 25 Холла установлена печатная плата 17 с не представленной здесь электронной системой обработки данных, которая связана с электронным устройством 16 обработки данных.
На исполнительном устройстве 18 укреплен держатель 19, предназначенный для установки на нем передающей и принимающей оптики 7 и 8. Для этого держатель 19, изготовленный в виде литой детали из синтетического материала, выполнен с передней платой 28. В ней предусмотрены гнезда с круглыми углублениями, в которые вставляется передающая и принимающая оптика 7 и 8 и закрепляется с помощью не показанных здесь фиксирующих средств. Передняя сторона передней платы 28 проходит в плоскости, по существу параллельной передней стенке корпуса 2. Нижняя сторона держателя 19 расположена на расстоянии от основания корпуса или от прилегающих к нему плоских элементов 29.
На задней стороне передней платы 28 держателя 19 с ней соединяются два распорных выступа 30, которые проходят параллельно на расстоянии друг от друга. Распорные выступы 30 простираются на всю высоту передней платы 28 и проходят перпендикулярно плоскости передней платы 28. Свободные концы распорных выступов соединены между собой перемычкой 31, на которой укреплено исполнительное устройство 18. Целесообразно, чтобы поперечина 31 была выполнена с двумя кронштейнами, между которыми располагается исполнительное устройство 18.
Между распорными выступами 30 расположена катушка 22 с железным сердечником 23, которая установлена на цоколе и образует упор для распорных выступов 30, ограничивая тем самым движение держателя 19.
Приемная опора, на которой укреплены плоские пружины (32), образована пластиной (27), проходящей параллельно передней стенке держателя (19). Держатель (19) подвижно опирается на приемную опору с помощь плоских пружин (32).
Держатель 19 подвижно опирается на образующую приемную опору пластину 27 между двумя плоскими пружинами 32 (фиг.2). Плоские пружины 32 выполнены в виде упругих листовых деталей. Плоские пружины 32 образованы упругими полосами, которые в данном исполнении имеют прямоугольное поперечное сечение.
Плоские верхние или нижние стороны плоских пружин 32 проходят перпендикулярно передней плате 28 и прикреплены к ее задней стороне. Плоские пружины 32 проходят с небольшим зазором вдоль наружных сторон распорных выступов 30.
Продольное движение исполнительного устройства 18 под действием тока в катушке 22 вызывает изгиб плоских пружин 32 и движение передней платы 28 в продольном направлении параллельно передней стенке корпуса 2. Упругость плоских пружин 32 создает возвратные усилия, противодействующие движениям передней платы 28 под действием исполнительного устройства 18. Посредством регулирования тока в катушке предотвращается наведение колебаний в системе, так что передняя плата 28 совершает непрерывное периодическое продольное возвратно-поступательное движение.
Благодаря движению передней платы 28 передающая оптика 7 смещается относительно оси излучения выходящих передаваемых световых лучей 3. За счет различных точек падения передаваемых световых лучей 3 на оптику 7 создается соответствующая различная фокусировка передаваемых световых лучей 3, посредством которой осуществляется желаемое отклонение излучения.
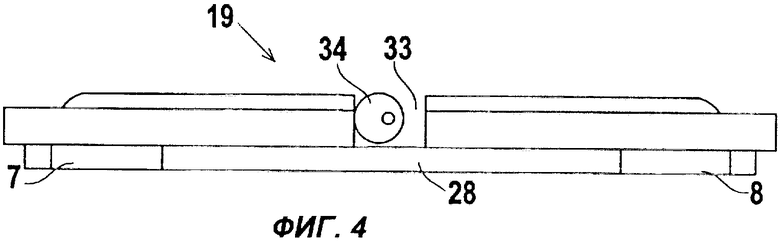
На фиг.4 представлен второй пример выполнения исполнительного устройства 18, при этом показана часть держателя 19, на котором укреплены не показанные здесь плоские пружины 32.
Отклоняющее движение держателя 19 в продольном направлении осуществляется посредством эксцентрикового диска 34, расположенного в выемке 33 держателя 19. Альтернативно эксцентриковый диск 34 может быть расположен между не показанными здесь распорными выступами 30 держателя 19. Эксцентриковый диск 34 расположен горизонтально с возможностью вращения вокруг приводного вала, приводимого в движение не показанным двигателем. Периферийная кромка эксцентрикового диска 34 прилегает к внутренней стенке выемки 33. Посредством вращения эксцентрикового диска 34 опирающийся на плоские пружины 32 держатель 19 приводится в отклоняющее движение в продольном направлении. Эксцентриковый диск 34 может приводиться в движение с помощью электродвигателя постоянного тока. В этом случае эксцентриковый диск 34 совершает непрерывное вращение. В том случае, когда эксцентриковый диск 34 приводится в движение с помощью шагового двигателя, он может также приводиться периодически в пределах предварительно заданной угловой области поворота.
Для определения позиции шагового двигателя может быть предусмотрено не показанное на чертеже фотоэлектрическое устройство.
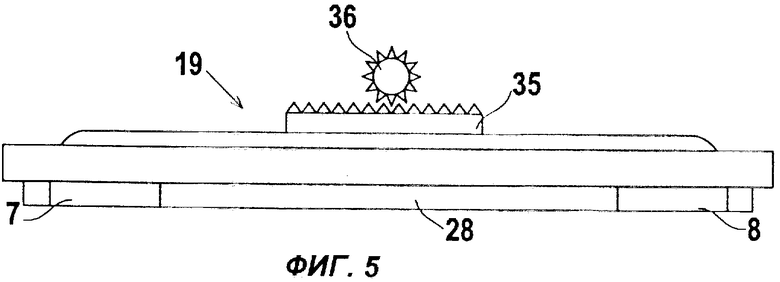
На фиг.5 представлен третий пример выполнения исполнительного устройства 18. В этом случае на задней стороне держателя 19 предусмотрена зубчатая рейка 35. С зубчатой рейкой зацепляется приводимое двигателем зубчатое колесо 36. Посредством вращения зубчатого колеса 36 держатель 19 приводится в отклоняющее движение в продольном направлении. Двигатель привода зубчатого колеса 36 может быть также выполнен в виде шагового двигателя, позиция которого контролируется с помощью фотоэлектрического устройства.
В другом, не представленном примере выполнения на держателе 19 предусмотрен проходящий в продольном направлении продольный ходовой винт, который может приводиться в движение шаговым двигателем. С его помощью держатель 19 также может приводиться в отклоняющее движение в продольном направлении.
Позиция двигателя также контролируется с помощью фотоэлектрического устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПОНОВКА ОТКЛОНЯЮЩИХ ЗЕРКАЛ ДЛЯ ОПТИЧЕСКОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА И СООТВЕТСТВУЮЩЕЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2564044C2 |
| УСТРОЙСТВО ДВУХСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2006 |
|
RU2328077C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ В ЗАМКНУТОМ И ОТКРЫТОМ ПРОСТРАНСТВАХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2737914C2 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА КРОВИ В ТКАНИ ТЕЛА | 2009 |
|
RU2527160C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОКАНАЛЬНОЙ ПРИЕМО-ПЕРЕДАЧИ ОПТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ФОРМИРОВАНИЯ СЕКТОРНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ И УГЛОМЕРНОЙ СИСТЕМЫ СЛЕЖЕНИЯ | 2020 |
|
RU2752790C1 |
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1989 |
|
SU1841038A1 |
| Устройство для автоматического управления строительной машиной | 1986 |
|
SU1364670A1 |
| УЛЬТРАЗВУКОВОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 1999 |
|
RU2248006C2 |
Оптоэлектронное устройство предназначено для определения высотного профиля объекта. Устройство содержит датчик расстояния, устройство отклонения. Датчик снабжен излучающим передатчиком и принимающим приемником. Высотный профиль объекта определяется в устройстве обработки данных по выходным данным датчика расстояния и по соответствующим углам отклонения передаваемых световых лучей. Устройство отклонения снабжено передающей оптикой и исполнительным устройством. Передающая оптика периодически приводится в отклоняющее движение посредством исполнительного устройства. Перед приемником расположена принимающая оптика. Оси излучения передаваемых световых лучей и принимаемых световых лучей проходят на удалении друг от друга. Технический результат - создание устройства нечувствительного к внешним возмущающим влияниям. 1 н. и 29 з.п.ф-лы, 5 ил.
| DE 4405376, 16.02.1995 | |||
| Устройство для контроля профиля изделия | 1987 |
|
SU1460616A1 |
| Устройство для бесконтактного измерения профиля объекта | 1983 |
|
SU1275206A1 |
| ОПТОЭЛЕКТРОННЫЙ СПОСОБ КОНТРОЛЯ ФОРМЫ ОБЪЕКТА | 1994 |
|
RU2097692C1 |
| US 5408325 А, 18.04.1995 | |||
| US 5949531 А, 07.09.1999. | |||

