Изобретение относится к геодезическому приборостроению и может быть использовано для автоматизации контрля земляных работ в мелиоративном строительстве.
Цель изобретения - контроль движения машины по курсу.
Поставленная цель достигается тем, что в устройстве для автоматического управления строительными машинами, со держащем передатчик, состоящий из источника излучения и узла вращения, создающий световую плоскость путем развертки луча с помощью приводимого во вращение электродвигателем отражательного элемента, стабилизатора и задающего генератора, и приемник, имеющий фоточувствительный элемент и усилитель сигналов управления высотным положением рабочего органа. В приемник введены формирователь опорного временного интервала с задающим кварцевым генератором, измеритель разности фаз, блок памяти и компаратор„
На чертеже :изображена блок-схема предлагаемого устройства для автоматического управления строительными машинами..
Передатчик, создающий горизонтальную или наклонную световую плоскость содержит источник излучения - лазер с коллимирующей оптикой 1, узел вращения, состоящий из отражательного элемента 2,приводимого в о вращение электродвигателем 3., которьй запиты- вается от стабилизатора 4 числа оборотов с задающим кварцевым генерг.то- ром 5о Приемник, имеющий круговую диаграмму направленности в плоскости развертки передатчика, крепится на рабочем органе машины. Он содержит несколько фотоЧ1увствительных элементов, например, три а, Ь, с, соединенных с входами усилителя 7 сигналов, имеющего соответствующее число каналов усиления о Кроме того, в усилителе 7 имеется канал суммарного сигнала (реализующий функцию ЛОГИЧЕСКОЕ или), с выхода которого сигнал поступает на второй вход цифрового измерителя 8 разности фаз. Первый вход которого соединен с выходом формирователя 9 опорного временного интервала, вход которого подключен к выходу задающего кварцевого генератора 10. Приемник содержит также блок 11 памяти. Соединенный с измерителем 8
f
0
5
разности фаз и логический компаратор 12, на входы которого подаются цифровые коды из блока 11 памяти и с выхода измерителя 8 разности фаз.
, Устройство работает следующим образом.
Фоточувствительные элементы 6 преобразуют световые импульсы от передатчика в последовательность электрических импульсов, которые усили - ваются затем усилителем 7. Период их следования имеет постоянную величину, поскольку скорость вращения отражательного элемента 2 передатчика стат: билизируется с помощью стабилизатора 4 числа оборотов. С выхода формирователя 9 оп,орного временного интервала снимается вторая последовательность импульсов с периодом следования (опорным интервалом), в точности равным периоду повторения принимаемых световых импульсов.
Перед началом работы строительная машина занимает такое положение, при котором линия, проходящая через передатчик и приемник, совпадает с про-:;, ектным направлением. .Этому .положению мащины соответствует определенная разность фаз двух, последовательностей импульсов. Цифровой код, выражающий ее, переносится подачей команды Запись с выхода измерителя 8 разности фаз в блок 11 памяти и сохраняется там до конца работы. Если в процессе работы машина не отклоняется от проектного направления, разность фаз остается постоянной и логический компаратор 12 фиксирует равенство кода, хранящегося в блоке 11 памяти, и текущего, снимаемого с выхода измерителя 8 разности фаз. При смещениях машины вправо или влево разность фаз изменяется и соответственно на выходах логического компаратора 12 Больше или Меньше появится уровень логической единицы (коды неравны),который далее преобразуется в команды Влево шш Вправо . Команды можно использовать для управления сигнализацией и исполнительными механизмами, возвращающими машину на проектное направление. Поскольку величина разности фаз пропор- 55 циональна угловому смещению машины от исходного направления, устройство дает возможность определять текущее положение машины на плоскости в пределах углов 1360.
0
5
0
45
0
Управление высотным положением рабочего органа производится гично известному устройству. Если, например, приемник несколько смещен вниз относительно световой плоскости и световые импульсы попадают только в верхний фотоприемный элемент а, на выходе соединенного с вдм канала усиления усилителя 7 .появляется сигнал, который используется для формирования команды Вверх. Команда поступает на электрогидравлический золотник, и. система гидравлики перемещает рабочий орган вместе с приемником вверх до тех пор, пока световые импульсы не приняты средним фотоприемным элементом в. При этом на выходе соединенного с ним в канал усиления , усилителя 7 появится сигнал Норма, отменяющий команды Вверх или Вниз и перемещение рабочего органа по вертикали прекращается. Аналогично устройство срабатешает и при смещении приемника вверх.
Таким образом, предлагаемое устт, ройство может использоваться для решения задачи управления движением строительной машины по курсу со стабилизацией высотного положения рабочего органа, например, при укладке дренажа. При наличии нескольких при-:емников возможно одновременное управление группой машин, двигающихся по радиусам от точки установки передатчика. Если дополнить предлагаемое устройство дальномером, измеряющим текущее расстояние от исходного та, например мерным колесом, а в регистр памяти записать коды полярных
ее , , -
364670
углов
10
15
Ю
25
30
35
40
точек траектории на плоскости как функции расстояния, появляется возможность управления движением машины по любой заданной траектории в пределах дальности действия устройства.
Формула изобретения
Устройство для автоматического управления строительной машиной, содержащее передатчик, состоящий из источника излучения и узла вращения отражательного элемента, и приемник, включаюпщй фоточувствительный элемент и усилитель сигналов управления высотным положением рабочего органа, отличающееся тем, что, с целью контроля движения машины по курсу, дополнительно узел вращения отражательного элемента снабжен стабилизатором числа оборотов, а прием ник снабжён формирователем опорного временного интервала, задающим кварцевым генератором, измерителем раз-, i ности фаз, блоком памяти и компаратором, при этом кварцевьм генератор через формирователь опорного интервала подключен к первому входу измерителя разности фаз, к второму входу которого подключен выход усилителя сигналов, а выход измерителя разности фаз подключен к первому входу компаратора и первому входу блока памяти, на второй вход которого подается сигнал . Запись, а выход подключен к второму входу компаратора, & выходов которого снимается сигнал управления курсом машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ И МЕСТНОЙ ВЕРТИКАЛИ ДЛЯ ВЕРТОЛЕТОВ И КОСМИЧЕСКИХ АППАРАТОВ ВЕРТИКАЛЬНОЙ ПОСАДКИ | 1995 |
|
RU2083998C1 |
| Устройство для детектирования фазоманипулированных сигналов | 1982 |
|
SU1042203A1 |
| Устройство для управления движением дорожно-строительной машины | 1990 |
|
SU1749336A1 |
| УСТРОЙСТВО ПОИСКА СИГНАЛОВ | 2009 |
|
RU2422982C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЭНЕРГОРАЙОНА С СЕТЬЮ ЭНЕРГОСИСТЕМЫ | 2022 |
|
RU2789163C1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2015 |
|
RU2594180C1 |
| Система автоматизации планировочных работ | 1983 |
|
SU1099014A1 |
Изобретение относится к области геодезического приборостроения. Цель изобретения - контроль движения машины по курсу. Устр-во содержит передатчик, состоящий из источника излучения - лазера с коллимирующей оптикой 1, узла вращения отражательnepsdaf uuK О С егг7о6ал . 7.аеС СС. него элемента 2, и приемник. Последний включает фоточувствительный элемент, соединенный с усилителем 7 сигналов управления высотным положением рабочего органа. Приемник имеет формирователь 9 опорного временного интервала, подключенный к задающему кварцевому генератору 10, соединенному с измерителем 8 разности фаз, блок 11 памяти и компаратор 12. При смещении машины вправо или влево разность фаз изменяется и соответственно на выходах компаратора 12 Больше или Меньше появляется уровень логической единицы,I который далее преобразуется в команды Влево или Вправо. Команды используются для управления сигнализацией и исполнительным механизмом, возвращающим машину на проектное направление. Поскольку величина разности фаз пропорциональна угловому смещению машины, то устр-во позволяет определить текущее положение машины на плоскости в пределах углов 360°. 1 ил. .fji/e/ / i/A & (Л со 05 4 Ot vl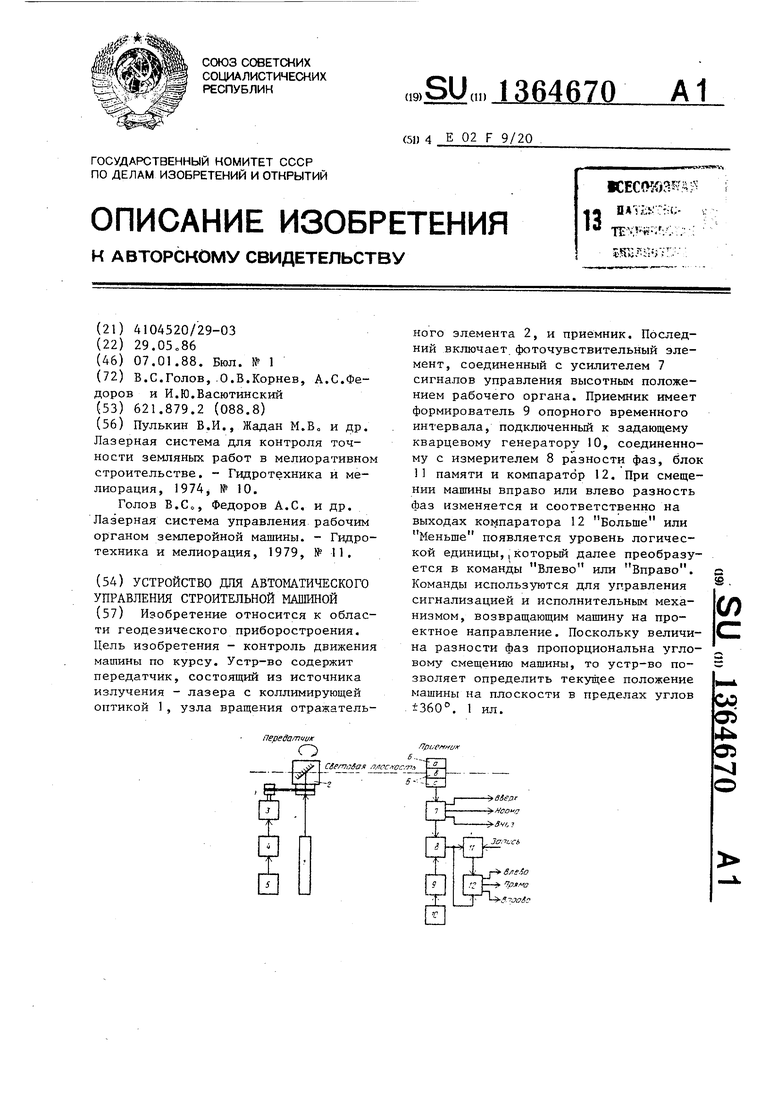
| Пулькин В.И., Жадан М.В„ и др | |||
| Лазерная система для контроля точности земляных работ в мелиоративном строительстве | |||
| - Гидротехника и мелиорация, 1974j № 10 | |||
| Голов В.Со, Федоров А.С | |||
| и др | |||
| Лазерная система управления рабочим органом землеройной машины | |||
| - Гидротехника и мелиорация, 1979, № 11. |
