немного питания„ Электропривод кипе матически связан с ведущим роликом платформы. Датчик пути, установленный на платформе, включает измери- тельное колесо, совмещенное с роликом, связанное с формирователем ме1482844
ток дальности, выход которого подключен к передатчику сигналов измерения пройденного пути. Ретроотра- жатель оптически связан с коллиматором. Ротоприемник выполнен позицион; но-чувствительным. 3 ил„
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Устройство для контроля расстояния между рельсами пути | 1988 |
|
SU1641922A1 |
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ ПОВЕРХНОСТИ | 1996 |
|
RU2133012C1 |
| Устройство для измерения абсолютного значения ускорения силы тяжести | 1985 |
|
SU1299319A1 |
| Интерференционное устройство для измерения линейных перемещений объекта | 1989 |
|
SU1670409A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УПРУГИХ ПОСТОЯННЫХ МАЛОПЛАСТИЧНЫХ МЕТАЛЛОВ И СПЛАВОВ ПРИ ПОВЫШЕННОЙ ТЕМПЕРАТУРЕ | 2017 |
|
RU2650742C1 |
| Устройство для измерения абсолютного значения ускорения силы тяжести | 1982 |
|
SU1030753A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УПРУГИХ ПОСТОЯННЫХ МАЛОПЛАСТИЧНЫХ МЕТАЛЛОВ И СПЛАВОВ ПРИ ПОВЫШЕННОЙ ТЕМПЕРАТУРЕ | 2017 |
|
RU2655949C1 |
Изобретение относится к геодезическому приборостроению, а именно к лазерным оптико-электронным устройствам для автоматизированного геодезического контроля прямолинейности направляющих рельсов, в частности для подкрановых путей. Цель изобретения - повышение точности. Устройство для контроля прямолинейности направляющих рельсов содержит приемоизлучатель 1, оптически связанный с самоходной телеуправляемой платформой 2, пульт 3 управления. Приемоизлучатель 1 располагается в начале контрольного участка, подключен к входу анализатора 4 смещения пути, к другим входам которого подключены выходы приемника 4 сигналов измерения пройденного пути и приемника 5 команд телеуправления электроприводом. Выход анализатора 4 подключен к входу регистратора 7 и блок 8 питания. Приемоизлучатель 1 включает источник светового лазерного излучения, оптически связанный через зеркало, светоделитель с коллиматором и через формирователь оптического сигнала с фотоприемником. Самоходная телеуправляемая платформа 2 включает ретротражатель, приемник команд телеуправления электроприводом, подключенный выходом через один из двух входов контактора к электроприводу. К другому входу контактора подключен источник 19 атономного питания. Электропривод кинематически связан с ведущим роликом платформы. Датчик пути, установленный на платформе, включает измерительное колесо, совмещенное с роликом, связанное с формирователем меток дальности, выход которого подключен к передатчику сигналов измерения пройденного пути. Ретроотражатель оптически связан с коллиматором. Ротоприемник выполнен позиционночувствительным. 3 ил.
Изобретение относится к геодезическому приборостроению, а именно к лазерным оптико-электронным устройствам, предназначенным для автоматизированного геодезического контроля прямолинейности направляющих рельсов массового технологического оборудования, в частности направляющих рельсов подкрановых путей, наиболее часто встречающихся на производстве .
Цель изобретения - повышение точности.
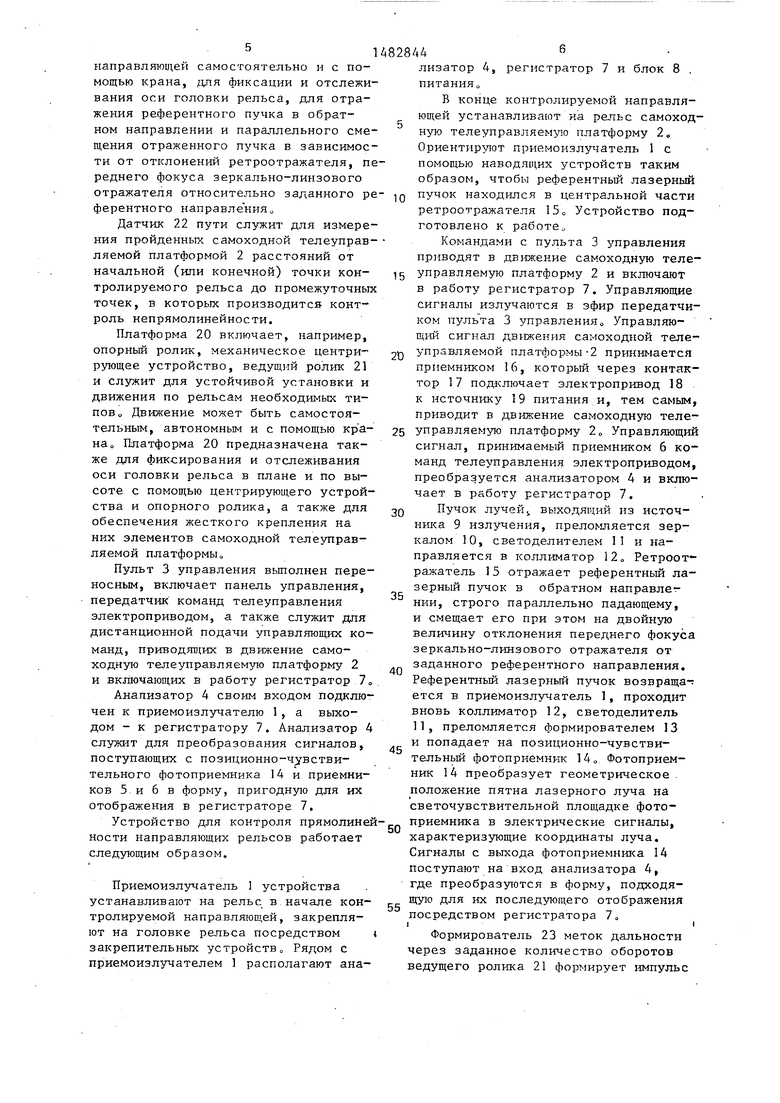
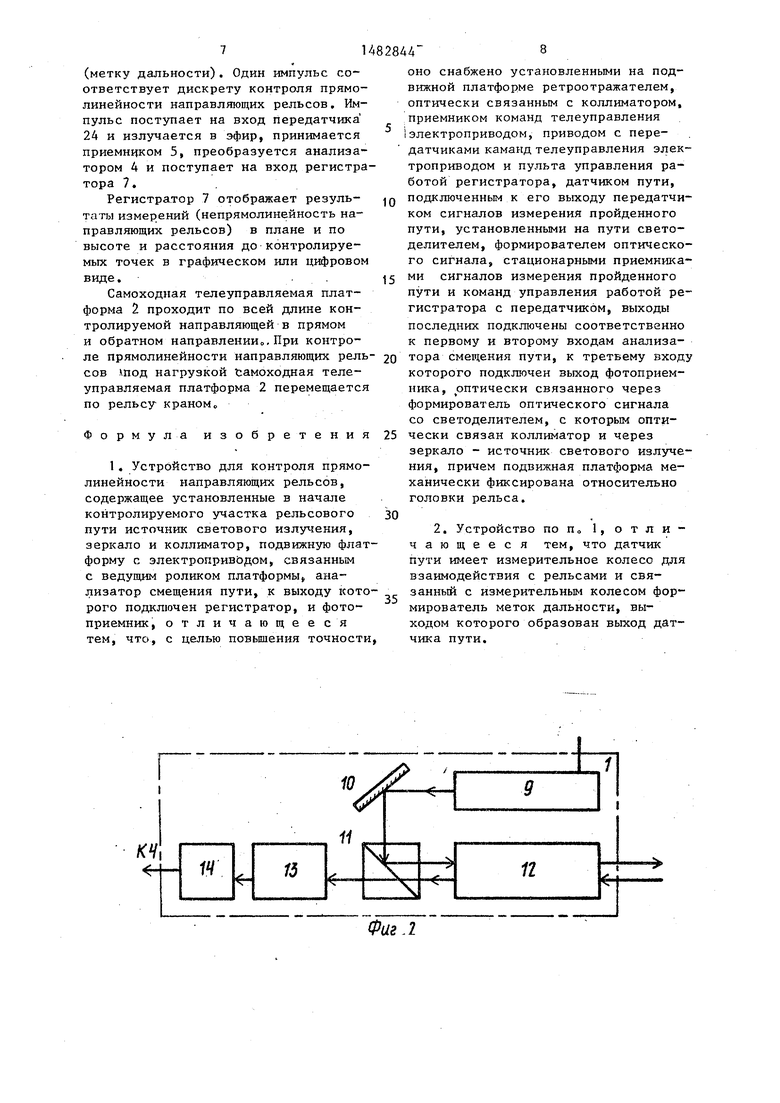
На фиг. 1 представлена блок-схема предложенного устройства; на фиг. 2- то же, приемоизлучателя; на фиг. 3 - то же, части устройства, установленной на подвижной платформе
Устройство для контроля прямолинейности направляющих рельсов содержит приемоизлучатель 1, оптически связанный с самоходной телеуправляемой платформой 2, пульт 3 управления, связанный с самоходной телеуправляемой платформой 2 и анализатором 4 смещения пути, ури входа которого подключены соответственно к выходам приемоизлучателя 1, приемника 5 сигналов измерения пройденного пути и приемника 6 команд управления работой регистратора, управляющий работой регистратор 7, вход которого подключен к выходу анализатора 4, и блок 8 питания.
Приемоизлучатель 1 включает источник 9 светового излучения, который- выполнен на лазере, зеркало 10, светоделитель П., коллиматор 12, формирователь 13 оптического сигнала, фотоприемник 14, оптически связанные между собой и расположенные на основании .в начале контролируемого участка пути,
Самоходная телеуправляемая платформа 2 включает ретроотракатель 15,
приемник 16 команд телеуправления электроприводом, выход которого подключен к одному из двух входов контактора 17, электропривод 18, источник автономного питания, расположенные на подвижной платформе 20. Контактор 17 подключен к входу электропривода 18, кинематически связанного с платформой 20 и ведущим роликом 21.
Датчик 22 пути самоходной телеуправляемой платформы 2 включает измерительное колесо с контактным устройством, конструктивно совмещенное
с ведущим роликом 21, формирователь 23 меток дальности, выход датчика 21 подключен к передатчику 24 сигналов измерения пройденного пути. Формирователь 23 меток дальности посредст0 вом контактного устройства связан с измерительным колесом Источник 19 автономного питания соединен с входами приемника 16 телеуправляемой платформы 2, контактора 17 и форми5 рователя 23 меток дальности. В прие- моизлучателе 1 формирователь 13 выполнен в виде одиночной собирательной линзы, фотоприемник 14 выполнен позиционно-чувстви0 тельным. Основание снабжено закрепительными и наводящими устройствами для крепления и ориентирования приемоизлучателя на рельсе контролируемой направляющей. Приемоизлучатель
5 1 служит для формирования и задания референтного направления с помощью сколлимированного луча лазера, для приема обратно отраженного пучка лучей и измерения его линейных смеще0 нкй.
Ретроотражатель 15 выполнен, например, в виде зеркально-линзввого отражателя.
Самоходная телеуправляемая плат- 5 форма 2 служит для перемещения рет- роотражателя 15 по контролируемой
направляющей самостоятельно и с помощью крана, для фиксации и отслеживания оси головки рельса, для отражения референтного пучка в обратном направлении и параллельного смещения отраженного пучка в зависимости от отклонений ретроотражателя, переднего фокуса зеркально-линзового отражателя относительно заданного референтного направления
Датчик 22 пути служит для измерения пройденных самоходной телеуправ- ляемой платформой 2 расстояний от начальной (или конечной) точки контролируемого рельса до промежуточных точек, в которых производитса контроль непрямолинейности.
Платформа 20 включает, например, опорный ролик, механическое центрирующее устройство, ведущий ролик 21 и служит для устойчивой установки и движения по рельсам необходимых типов о Движение может быть самостоятельным, автономным и с помощью кр а- нао Платформа 20 предназначена также для фиксирования и отслеживания оси головки рельса в плане и по высоте с помощью центрирующего устройства и опорного ролика, а также для обеспечения жесткого крепления на них элементов самоходной телеуправляемой платформы
Пульт 3 управления выполнен переносным, включает панель управления, передатчик команд телеуправления
электроприводом, а также служит для дистанционной подачи управляющих команд, приводящих в движение самоходную телеуправляемую платформу 2 и включающих в работу регистратор 70
Анализатор 4 своим входом подключен к приемоизлучателю 1, а выходом - к регистратору 7. Анализатор 4 служит для преобразования сигналов, поступающих с позиционно-чувстви- тельного фотоприемника 14 и приемников 5 и 6 в форму, пригодную для их отображения в регистраторе 7.
Устройство для контроля прямолиней ности направляющих рельсов работает следующим образом.
Приемоизлучатель 1 устройства устанавливают на рельс в начале контролируемой направляющей, закрепляют на головке рельса посредством закрепительных устройств„ Рядом с приемоизлучателем 1 располагают ана-
0
5
5
D
0
5
0
5
5
лизатор 4, регистратор 7 и блок 8 . питанияо
В конце контролируемой направляющей устанавливают на рельс самоходную телеуправляемую платформу 2„ Ориентируют приемоизлучатель 1 с помощью наводящих устройств таким образом, чтобы референтный лазерный пучок находился в центральной части ретроотражателя 150 Устройство подготовлено к работе о
Командами с пульта 3 управления приводят в движение самоходную телеуправляемую платформу 2 и включают в работу регистратор 7. Управляющие сигналы излучаются в эфир передатчиком пульта 3 управленияо Управляющий сигнал движения самоходной телеуправляемой платформы-2 принимается приемником 16, который через контактор 17 подключает электропривод 18 к источнику 19 питания и, тем самым, приводит в движение самоходную телеуправляемую платформу 2 „ Управляющий сигнал, принимаемый приемником 6 команд телеуправления электроприводом, преобразуется анализатором 4 и включает в работу регистратор 7.
Пучок лучейь выходящий из источника 9 излучения, преломляется зеркалом 10, светоделителем 11 и направляется в коллиматор 12„ Ретроот- ражатель 15 отражает референтный лазерный пучок в обратном направле- - нии, строго параллельно падающему, и смещает его при этом на двойную величину отклонения переднего фокуса зеркально-линзового отражателя от заданного референтного направления. Референтный лазерный пучок возвращав ется в приемоизлучатель 1, проходит вновь коллиматор 12, светоделитель 11, преломляется формирователем 13 и попадает на позиционно-чувстви- тельный фотоприемнкк 14„ Фотоприемник 14 преобразует геометрическое положение пятна лазерного луча на светочувствительной площадке фотоприемника в электрические сигналы, характеризующие координаты луча. Сигналы с выхода фотоприемника 14 поступают на вход анализатора 4, где преобразуются в форму, подходящую для их последующего отображения
посредством регистратора 7
ii
Формирователь 23 меток дальности через заданное количество оборотов ведущего ролика 21 формирует импульс
(метку дальности). Один импульс соответствует дискрету контроля прямолинейности направляющих рельсов. Импульс поступает на вход передатчика 24 и излучается в эфир, принимается приемником 5, преобразуется анализатором 4 и поступает на вход регистратора 7.
Регистратор 7 отображает результаты измерений (непрямолинейность направляющих рельсов) в плане и по высоте и расстояния до контролируемых точек в графическом или цифровом виде.
Самоходная телеуправляемая платформа 2 проходит по всей длине контролируемой направляющей в прямом и обратном направлении. При контроле прямолинейности направляющих рель- 20 тора смещения пути, к третьему входу
сов шод нагрузкой самоходная телеуправляемая платформа 2 перемещается по рельсу краномс
Формула изобретения
мирователь меток дальности, выходом которого образован выход датчика пути.
5
оно снабжено установленными на подвижной платформе ретроотражателем, оптически связанным с коллиматором, приемником команд телеуправления (электроприводом, приводом с передатчиками камаид телеуправления электроприводом и пульта управления работой регистратора, датчиком пути, подключенным к его выходу передатчиком сигналов измерения пройденного пути, установленными на пути светоделителем, формирователем оптического сигнала, стационарными приемниками сигналов измерения пройденного пути и команд управления работой регистратора с передатчиком, выходы последних подключены соответственно к первому и второму входам анализакоторого подключен выход фотоприемника, оптически связанного через формирователь оптического сигнала со светоделителем, с которым оптически связан коллиматор и через зеркало - источник светового излучения, причем подвижная платформа механически фиксирована относительно головки рельса.
Фиг Л
-i
f
Фиг.З
| Измайлов Р.Б | |||
| Разработка и исследование автоматического метода контроля прямолинейности подкрановых путей | |||
| Автореф | |||
| дис„ на соиск | |||
| учен | |||
| ст„ какд0 техн | |||
| наук, М„, 1984, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
