ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к навигации и, более конкретно, к спутниковым способам навигации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Эффективность навигационной системы можно определить по распределению ошибок в навигационных измерениях (например, точность), выполняемых системой. Эффективность системы может также зависеть от ее способности своевременно выдавать предупреждения пользователям, когда ее не следует использовать (например, достоверность). Эффективность можно также измерять промежутком времени, который требуется навигационной системе для первого определения местоположения после холодного запуска (например, время до первого определения местоположения). Кроме того, эффективность системы может зависеть от отрезка времени или определенных обстоятельств, при которых заданные параметры эффективности находятся в заданных пределах (например, доступность).
К сожалению, навигационные сигналы связи, подаваемые различными существующими навигационными системами, зачастую не обеспечивают удовлетворительной эффективности системы. В частности, мощность сигнала, полоса пропускания и геометрические факторы для таких навигационных сигналов в целом недостаточны для удовлетворения потребностей многих сценариев использования, на которые существует спрос.
Существующие подходы к навигации, основанные, например, на сигналах Глобальной системы определения местоположения (GPS), часто дают недостаточную мощность сигнала или обладают недостаточной геометрией для легкого проникновения в здания или в пространство между городскими домами. Такие сигналы могут также подвергаться воздействию преднамеренных помех во враждебных окружающих средах и могут помешать их использованию в чрезвычайных ситуациях. Другие подходы к навигации, основанные, например, на сотовом телефоне или телевизионных сигналах, обычно испытывают недостаток в вертикальной навигационной информации.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним вариантом выполнения изобретения способ осуществления навигации включает в себя прием сигнала с низкой околоземной орбиты (LEO) от спутника LEO; декодирование навигационного сигнала из сигнала LEO; прием первого и второго дальномерных сигналов соответственно от первого и второго источников дальномерных сигналов; определение калибровочной информации, связанной с первыми и вторыми источниками дальномерных сигналов; и вычисление положения при помощи навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации.
В соответствии с другим вариантом выполнения изобретения навигационное устройство включает в себя антенну, выполненную с возможностью принимать сигнал LEO от спутника LEO и принимать первый и второй дальномерные сигналы соответственно от первого и второго источников дальномерных сигналов; процессор приемника, выполненный с возможностью преобразования с понижением частоты сигнала LEO для дальнейшей обработки; и навигационный процессор, выполненный с возможностью декодирования навигационного сигнала из сигнала LEO и выполненный с возможностью вычисления положения навигационного устройства при помощи навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации, связанной с первым и вторым источниками дальномерных сигналов.
В соответствии с еще одним вариантом выполнения изобретения навигационное устройство включает в себя средство приема сигнала LEO от спутника LEO; средство декодирования навигационного сигнала из сигнала LEO; средство приема первого и второго дальномерных сигналов соответственно от первого и второго источников дальномерных сигналов; средство определения калибровочной информации, связанной с первым и вторым источниками дальномерных сигналов; и средство вычисления положения при помощи навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации.
В соответствии с еще одним вариантом выполнения изобретения способ подачи сигнала LEO от спутника LEO включает в себя обеспечение множества каналов передачи на множестве временных интервалов передачи, причем каналы передачи включают в себя набор каналов связи и набор навигационных каналов; выработку первого дальномерного перекрывающего сигнала на основе псевдослучайных помех (PRN), соответствующего навигационному сигналу; применение первого дальномерного перекрывающего сигнала на основе PRN к первому набору навигационных каналов; объединение каналов связи и навигационных каналов в сигнал LEO; и широкополосную передачу сигнала LEO от спутника LEO.
В соответствии с еще одним вариантом выполнения изобретения спутник LEO содержит антенну, выполненную с возможностью передачи сигнала LEO от спутника LEO; и процессор, выполненный с возможностью обеспечения множества каналов передачи на множество временных интервалов передачи, причем каналы передачи включают в себя набор каналов связи и набор навигационных каналов, выработки первого дальномерного перекрывающего сигнала на основе PRN, соответствующего навигационному сигналу, применения первого дальномерного перекрывающего сигнала на основе PRN к первому набору навигационных каналов и объединения каналов связи и навигационных каналов в сигнал LEO.
В соответствии с еще одним вариантом выполнения изобретения спутник LEO содержит средство обеспечения множества каналов передачи на множестве временных интервалов передачи, причем каналы передачи включают в себя набор каналов связи и набор навигационных каналов; средство выработки первого дальномерного перекрывающего сигнала на основе PRN, соответствующего навигационному сигналу; средство применения первого дальномерного перекрывающего сигнала на основе PRN к первому набору навигационных каналов; средство объединения каналов связи и навигационных каналов в сигнал LEO; и средство передачи сигнала LEO от спутника LEO.
В соответствии с еще одним вариантом выполнения изобретения способ предоставления данных по восходящего каналу связи на спутник LEO включает в себя определение информации о положении при помощи использования сигнала LEO, принятого от спутника LEO, причем первый дальномерный сигнал принимают от первого источника дальномерного сигнала, а второй дальномерный сигнал принимают от второго источника дальномерного сигнала; определение параметра опережения при помощи привязки к локальным часам и привязки к часам спутника LEO; подготовку сигнала передачи данных по восходящей линии связи, включающего в себя данные для передачи по восходящей линии связи, которые подлежат передаче на спутник LEO; синхронизацию сигнала передачи данных по восходящей линии связи со спутником LEO при помощи параметра опережения; и передачу сигнала передачи данных по восходящей линии связи на спутник LEO.
В соответствии с еще одним вариантом выполнения изобретения устройство передачи данных по восходящей линии связи включает в себя антенну, выполненную с возможностью приема сигнала LEO от спутника LEO, приема первого и второго дальномерных сигналов соответственно от первого и второго источников дальномерных сигналов и широковещательной передачи сигнала передачи данных по восходящей линии связи на спутник LEO; и процессор, выполненный с возможностью определения информации о положении при помощи сигнала LEO, первого дальномерного сигнала и второго дальномерного сигнала, определения параметра опережения при помощи привязки к локальным часам и привязки к часам спутника LEO, подготовки сигнала передачи данных по восходящей линии связи, включающего в себя данные для передачи по восходящей линии связи, которые подлежат передаче на спутник LEO, и синхронизации сигнала передачи данных по восходящей линии связи со спутником LEO при помощи параметра опережения.
В соответствии с еще одним вариантом выполнения изобретения устройство передачи данных по восходящей включает в себя средство определения информации положения при помощи сигнала LEO, принятого от спутника LEO, первого дальномерного сигнала, принятого от первого источника зондирующего сигнала, и второго дальномерного сигнала, принятого от второго источника дальномерного сигнала; средство определения параметра опережения при помощи привязки к локальным часам и привязки к часам спутника LEO; средство подготовки сигнала передачи данных по восходящей линии связи, который подлежит передаче на спутник LEO; средство синхронизации сигнала передачи данных по восходящей линии связи со спутником LEO при помощи параметра опережения; и средство широковещательной передачи сигнала передачи данных по восходящей линии связи на спутник LEO.
В соответствии с еще одни вариантом выполнения изобретения навигационный сигнал содержит по меньшей мере часть сигнала LEO, подаваемого спутником LEO, способ создания локализованной преднамеренной помехи для навигационного сигнала включает в себя фильтрацию источника шума во множество частотных диапазонов для получения множества фильтрованных шумовых сигналов в этих частотных диапазонах, причем навигационный сигнал распределен по множеству каналов сигнала LEO, при этом каналы распределены по частотным диапазонам и множеству временных интервалов; создание последовательности PRN, соответствующей последовательности модуляции, используемой спутником LEO для распределения навигационного сигнала по каналам; модуляцию фильтрованных шумовых сигналов при помощи последовательности PRN для получения множества модулированных шумовых сигналов; и широковещательную передачу модулированных шумовых сигналов по зоне действий для обеспечения множества всплесков преднамеренной помехи, соответствующих навигационному сигналу, причем всплески преднамеренной помехи выполнены с возможностью по существу маскировать навигационный сигнал в зоне действий.
В соответствии с другим вариантом выполнения изобретения навигационный сигнал содержит по меньшей мере часть сигнала LEO, выдаваемого спутником LEO, устройство для преднамеренной помехи, выполненное с возможностью создания локализованной преднамеренной помехи для навигационного сигнала, включает в себя источник шума, выполненный с возможностью обеспечения шумового сигнала; множество фильтров, выполненных с возможностью фильтрации шумового сигнала во множество частотных диапазонов для создания множества фильтрованных шумовых сигналов в этих частотных диапазонах, причем навигационный сигнал распределен по множеству каналов сигнала LEO, при этом каналы распределены по частотным диапазонам и по множеству временных интервалов; генератор последовательности PRN, выполненный с возможностью обеспечения последовательности модуляции, используемой спутником LEO для распределения навигационного сигнала по каналам; множество генераторов колебаний, выполненных с возможностью модуляции фильтрованных шумовых сигналов при помощи последовательности PRN для обеспечения множества модулированных шумовых сигналов; и антенну, выполненную с возможностью широковещательной передачи модулированных шумовых сигналов по зоне действий для обеспечения множества всплесков преднамеренной помехи, соответствующих навигационному сигналу, причем всплески преднамеренной помехи выполнены с возможностью по существу маскировать навигационный сигнал в зоне действий.
В соответствии с еще одним вариантом выполнения изобретения навигационный сигнал содержит по меньшей мере часть сигнала LEO, подаваемого спутником LEO, устройство преднамеренной помехи, выполненное с возможностью создания локализованной помехи для навигационного сигнала, включает в себя средство фильтрации источника шума во множество частотных диапазонов для обеспечения множества фильтрованных шумовых сигналов в этих частотных диапазонах, причем навигационный сигнал распределен по множеству каналов сигнала LEO, при этом каналы распределены по частотным диапазонам и по множеству временных интервалов; средство создания последовательности PRN, соответствующей последовательности модуляции, используемой спутником LEO, для распределения навигационного сигнала по каналам; средство модуляции фильтрованных шумовых сигналов при помощи созданных последовательностей PRN для обеспечения множества модулированных шумовых сигналов; и средство широковещательной передачи модулированных шумовых сигналов по зоне действий для обеспечения множества всплесков преднамеренной помехи, соответствующих навигационному сигналу, причем всплески преднамеренной помехи выполнены с возможностью по существу маскировать навигационный сигнал в зоне действий.
Объем изобретения определяется формулой изобретения, которая включена в настоящий раздел посредством ссылки. Более полное понимание вариантов выполнения настоящего изобретения, а также раскрытие других его преимуществ будет предоставлено специалистам в данной области техники в виде нижеприведенного подробного описания одного или нескольких вариантов выполнения. При этом даются ссылки на прилагаемые листы чертежей, перед чем приводится их краткое описание.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 содержит общий вид комплексной высокоэффективной системы навигации и связи в соответствии с вариантом выполнения изобретения.
Фиг.2 также содержит общий вид системы на Фиг.1 в соответствии с вариантом выполнения изобретения.
Фиг.3 иллюстрирует общую схему работы системы на Фиг.1 в соответствии с вариантом выполнения изобретения.
Фиг.4 иллюстрирует подход к реализации сигналов с низкой околоземной орбиты в соответствии с вариантом выполнения изобретения.
Фиг.5 иллюстрирует автокорреляционную функцию, связанную с сигналами с низкой околоземной орбиты, в соответствии с вариантом выполнения изобретения.
Фиг.6 иллюстрирует процесс декодирования военной навигационной компоненты сигнала с низкой околоземной орбиты в соответствии с вариантом выполнения изобретения.
Фиг.7 иллюстрирует блок-схему коррелятора навигационного устройства в соответствии с вариантом выполнения изобретения.
Фиг.8 иллюстрирует процесс декодирования коммерческой навигационной компоненты сигнала с низкой околоземной орбиты в соответствии с вариантом выполнения изобретения.
Фиг.9 иллюстрирует альтернативный процесс декодирования коммерческой навигационной компоненты сигнала с низкой околоземной орбиты в соответствии с вариантом выполнения изобретения.
Фиг.10 иллюстрирует процесс декодирования гражданской навигационной компоненты сигнала с низкой околоземной орбиты в соответствии с вариантом выполнения изобретения.
Фиг.11 иллюстрирует сравнение между навигационными компонентами сигнала с низкой околоземной орбиты и кодов GPS в соответствии с вариантом выполнения изобретения.
Фиг.12 иллюстрирует блок-схему устройства для преднамеренных помех, которое можно применять для создания локализованных преднамеренных помех для навигационных сигналов, в соответствии с вариантом выполнения изобретения.
Фиг.13 содержит представление в частотной и временной области работы устройства для преднамеренных помех на Фиг.12 в соответствии с вариантом выполнения изобретения.
Фиг.14 иллюстрирует процесс создания псевдослучайных помех в соответствии с вариантом выполнения изобретения.
Фиг.15 иллюстрирует процесс построения равномерно распределенных целых чисел диапазона модулей из совокупности выбора канала в соответствии с вариантом выполнения изобретения.
Фиг.16 иллюстрирует процесс преобразования пула выбора канала в список случайных неперекрывающихся каналов в соответствии с вариантом выполнения изобретения.
Фиг.17 иллюстрирует схему скачкообразного изменения частоты, вырабатываемую процессом на Фиг.16, в соответствии с вариантом выполнения изобретения.
Фиг.18 иллюстрирует блок-схему процессора приемника, выполненного с возможностью приема и дискретизации навигационных сигналов для преобразования с понижением частоты в соответствии с вариантом выполнения изобретения.
Фиг.19 иллюстрирует блок-схему навигационного процессора, выполненного с возможностью выполнения обработки дальномерного сигнала, в соответствии с вариантом выполнения изобретения.
Фиг.20 иллюстрирует определение различных параметров состояния, используемых навигационным процессором на Фиг.19, в соответствии с вариантом выполнения изобретения.
Фиг.21 иллюстрирует блок-схему модуля слежения, выполненного с возможностью осуществления слежения за сигналом, в соответствии с вариантом выполнения изобретения.
Фиг.22-29 иллюстрируют различные примеры применения навигационной системы для выполнения навигации в различной окружающей среде в соответствии с различными вариантами выполнения изобретения.
Фиг.30 иллюстрирует универсальную структуру кадра восходящей линии связи спутника на низкой околоземной орбите в соответствии с вариантом выполнения изобретения.
Фиг.31 иллюстрирует наземную инфраструктуру для синхронизации восходящей линии связи передачи данных для спутника на низкой околоземной орбите в соответствии с вариантом выполнения изобретения.
Фиг.32 иллюстрирует реализацию сигнала для передачи данных низкого уровня по восходящей линии связи в соответствии с вариантом выполнения изобретения.
Фиг.33 иллюстрирует блок-схему передатчика для поддержки восходящей линии связи передачи данных для спутника на низкой околоземной орбите в соответствии с вариантом выполнения изобретения.
Фиг.34 иллюстрирует блок-схему различных компонентов восходящей линии связи передачи данных для спутника на низкой околоземной орбите в соответствии с вариантом выполнения изобретения.
Для понимания вариантов выполнения настоящего изобретения и их преимуществ лучше всего обратиться к нижеследующему подробному описанию. Следует понимать, что подобные номера позиций используются для указания подобных элементов, приведенных на одном или нескольких чертежах.
ПОДРОБНОЕ ОПИСАНИЕ
В соответствии с различными вариантами выполнения можно применять систему, использующую спутники на низкой околоземной орбите (LEO) для реализации различных навигационных сигналов с целью обеспечения навигации с высоким уровнем интеграции. В систему могут быть встроены пассивные дальномерные сигналы от спутников LEO и других не-LEO передатчиков.
Опорная сеть наблюдательных станций может оценить отклонение часов, структуру сигнала и местоположение передатчика либо эфемериду различных платформ, с которых передаются пассивные дальномерные сигналы. Эта полученная в результате оценки информация (называемая также калибровочной информацией) может передаваться различным навигационным устройствам по линии передачи данных для связи со спутниками LEO или по другим линиям передачи данных.
Для осуществления высокоточной навигации навигационные устройства могут быть выполнены с возможностью смешивать информацию широковещательной передачи и несколько различных типов сигналов. Широковещательный сигнал LEO может быть реализован в виде военных, коммерческих и гражданских навигационных сигналов для обеспечения разделения потребителей по различным навигационным сигналам и для обеспечения распределения расходов на инфраструктуру. Может быть также предложена комплексная широкополосная восходящая линия связи с низкой вероятностью перехвата и обнаружения (LPI/D).
Если теперь обратиться к чертежам, изображения на которых приведены исключительно с целью иллюстрации вариантов выполнения настоящего изобретения, а не с целью его ограничения, то на Фиг.1 приведен общий вид комплексной высокоэффективной системы 100 навигации и связи (называемой также системой iGPS) в соответствии с вариантом выполнения изобретения. Система 100 может включать в себя навигационное устройство 102 (называемое также пользовательским оборудованием, пользовательским устройством и (или) пользовательским навигационным устройством), реализованное при помощи соответствующих аппаратных и (или) программных средств для приема и декодирования сигналов от различных космических и наземных источников дальномерных сигналов для осуществления навигации. Такие сигналы могут включать, например, спутниковые широковещательные сигналы от GPS, LEO (например, Indium или Globalstar), широкозонной усиливающей системы (WAAS), европейской геостационарной дополнительной навигационной системы (EGNOS), многофункциональной спутниковой усиливающей системы (MSAS), системы Galileo, квазизенитной спутниковой системы (QZSS), и (или) спутников мобильных спутниковых предприятий (MSV). Такие сигналы могут также включать в себя наземные широковещательные сигналы от опор сотовой связи, телевизионных опор, WiFi, WiMAX, узлов национальной интеграции инфраструктуры транспортных средств (VII) и от других соответствующих источников.
В примере, приведенном на Фиг.1, навигационное устройство 102 может быть выполнено с возможностью приема сигналов глобальной системы 106 определения местоположения (GPS) (например, защищенных и (или) незащищенных сигналов GPS) от обычных навигационных спутников. Кроме того, навигационное устройство 102 может также принимать сигналы 104 от различных спутников 108 на низкой околоземной орбите (LEO). В связи с этим каждый из сигналов 104 LEO (называемые также сигналами iGPS) может представлять собой составной сигнал, включающий в себя сигнал 104А связи, военный навигационный сигнал 104В, коммерческий навигационный сигнал 104С и гражданский навигационный сигнал 104D. Такая реализация позволяет спутникам 108 LEO одновременно обслуживать военных, коммерческих и гражданских пользователей и позволяет таким пользователям распределять расходы на эксплуатацию системы 100.
В одном примере спутники 108 LEO могут представлять собой спутники существующей системы связи (например, Iridium или Globalstar), которые были модифицированы и (или) видоизменены для поддержки системы 100, описанной в настоящем документе. Как также показано на Фиг.1, спутники 108 LEO могут быть выполнены с возможностью поддержки сигналов 110 межспутниковых линий связи между различными спутниками 108 LEO.
При помощи сигналов 106 GPS и (или) сигналов 104 LEO навигационное устройство 102 может с высокой точностью вычислить свое положение (и, соответственно, положение связанного с ним пользователя). Вычисленные данные о положении, определенные таким образом (и другие данные, которые могут потребоваться), можно затем передать по восходящей линии связи на спутники 108 LEO при помощи описанной в настоящем документе восходящей линии передачи данных с расширенным спектром.
Кроме того, навигационное устройство 102 может быть выполнено с возможностью приема и выполнения навигации при помощи широковещательных сигналов от других спутниковых и наземных источников дальномерных сигналов, что может потребоваться в определенных вариантах выполнения. Кроме того, навигационное устройство 102 может быть снабжено инерциальным измерительным блоком (IMU), например устройством с микроэлектромеханической системой (MEMS), для обеспечения описанной в настоящем документе защиты от преднамеренных помех.
Навигационное устройство 102 может быть реализовано в любой требуемой конфигурации, которая может соответствовать определенным областям применения. Например, в различных вариантах выполнения навигационное устройство 102 может быть реализовано в виде переносного навигационного устройства, навигационного устройства на транспортном средстве, навигационного устройства на летательном аппарате или устройства иного типа.
На Фиг.2 приведен еще один общий вид системы 100 в соответствии с вариантом выполнения изобретения. В частности, на Фиг.2 приведены спутники 108 LEO и спутники 202 GPS на орбите вокруг Земли. Кроме того, на Фиг.2 дополнительно приведены различные аспекты инфраструктурных подсистем системы 100. Например, система 100 может включить в себя опорную сеть 204, выполненную с возможностью приема сигналов 104 LEO или других дальномерных сигналов, наземную инфраструктуру 206 GPS и наземную инфраструктуру 208 LEO. Должно быть понятно, что в различных вариантах выполнения системы 100 могут иметь и другие космические и (или) наземные компоненты.
На Фиг.3 приведена общая схема работы системы 100 в соответствии с вариантом выполнения изобретения. Должно быть понятно, что хотя на Фиг.3 приведено множество подсистем, не все такие подсистемы обязательно должны содержаться во всех вариантах выполнения системы 100.
Как показано на Фиг.3, спутники 108 LEO движутся с высокой угловой скоростью относительно навигационных устройств 102 и различных приведенных на чертеже наземных подсистем. Это быстрое угловое движение может способствовать разрешению наземными подсистемами неоднозначностей, связанных с цикличностью. Кроме того, сигналы 104 LEO могут быть реализованы с более высокой мощностью по сравнению с обычными навигационными сигналами 106. Кроме того, сигналы 104 LEO могут также обеспечить проникновение сквозь препятствия или здания.
Сигналы 104 LEO могут включать в себя линию связи для дальномерных и информационных сигналов к различным наземным терминалам. Как показано на Фиг.3, такие терминалы могут включать в себя географически распределенную опорную сеть 204 и навигационные устройства 102 (показанное в данном примере в виде сотового телефона, устройства MEMS и автомобиля).
Показаны также различные спутники, в том числе спутники 202 GPS, спутники 306 системы "Галилео", спутники 302 WAAS, и спутники 304 QZSS/MSV, каждый из которых может быть выполнен с возможностью широковещательной передачи дальномерных и информационных сигналов по нисходящей линии связи к опорной сети 204 и навигационным устройствам 102 в соответствии с различными вариантами выполнения.
Следует иметь в виду, что для большей ясности некоторые дальномерные сигналы на Фиг.3 не показаны. Например, в одном варианте выполнения все изображенные спутники могут быть выполнены с возможностью широковещательной передачи ко всем навигационным устройствам 102 и к опорной сети 204.
Как также показано на Фиг.3, опорной сетью 204 и навигационными устройствами 102 могут контролироваться различные дальномерные сигналы 318 от множества источников 310 дальномерных сигналов. Опорная сеть 204 может быть выполнена с возможностью определения характеристик каждого источника 310 дальномерных сигналов для предоставления калибровочной информации, связанной с каждым источником дальномерных сигналов. Такая информация может передаваться на спутник 108 LEO по соответствующей восходящей линии 320 передачи данных, закодированная спутником 108 LEO в один или несколько военных, коммерческих или навигационных сигналов 104B/104C/104D сигнала 104 LEO, и передаваться способом широковещательной передачи на навигационные устройства 102 в качестве составной части сигнала 104 LEO. После этого навигационные устройства 102 могут использовать калибровочную информацию для обработки дальномерных сигналов 318 с целью выполнения навигации в сочетании с дальномерными измерениями, выполненными при помощи сигналов 104 LEO.
В целом различные передатчики могут передавать временные (и, следовательно, дальномерные) характеристики. В этой связи для универсального источника дальномерных сигналов связанный с ним дальномерный сигнал может быть принят опорной сетью 204 и навигационными устройствами 102. Опорная сеть 204 может определить калибровочную информацию, связанную с дальномерным сигналом, и телеметрировать такую калибровочную информацию навигационным устройствам 102 по информационной восходящей линии связи со спутниками 108 LEO и (или) по наземным линиям связи.
Например, на Фиг.3 приведены сигналы 106 GPS, принимаемые одним из источников 310 дальномерных сигналов, реализованных в виде узла WiFi. Если возможность измерять временные характеристики (что эквивалентно дальномерным характеристиками, если умножить на скорость света) заданных атрибутов сигнала WiFi реализована в приемнике GPS, то этот приемник может одновременно измерять время приема сигналов WiFi и GPS. Можно вычислить разность между этими величинами, осуществить привязку ко времени и передать опорной сети 204 для обеспечения калибровочной информации, связанной с узлом WiFi. В ответ на прием сигнала 106 GPS и иного типа дальномерных сигналов 318 можно посредством опорной сети 204 определить дополнительную калибровочную информацию. В каждом случае опорная сеть 204 может телеметрировать в режиме реального времени калибровочную информацию, связанную с узлом WiFi, навигационным устройствам 102 через спутник 104 LEO по восходящей линии 320 связи и при помощи сигнала 104 LEO (например, по космическим линиям связи). Калибровочную информацию можно также предоставить навигационным устройствам 102 по наземным линиям связи. При этом каждый источник 310 дальномерных сигналов необязательно должен быть в пределах видимости всех узлов опорной сети 204, если имеется сеть 316 (например, Интернет) между различными наземными узлами.
Как сказано выше, спутники 108 LEO могут быть реализованы в виде спутников связи (например, спутников системы Indium или Globalstar), которые подверглись модификации и (или) видоизменению, как описано в настоящем документе, для поддержки навигационных характеристик системы 100. Приведенные ниже таблицы 1 и 2 содержат различные характеристики спутников связи Indium и спутников связи Globalstar, которые можно использовать в качестве спутников 108 LEO в соответствии с различными вариантами осуществления:
В одном примере, в котором для реализации спутников 108 LEO используются спутники связи системы Indium, полетные компьютеры спутников связи Indium можно перепрограммировать при помощи соответствующего программного обеспечения для облегчения обработки навигационных сигналов. В другом примере реализации спутников 108 LEO используются спутники связи системы Globastar, спутниковая архитектура типа "прямая дыра" позволяет модернизировать наземное оборудование для обеспечения множества новых форматов сигнала.
В вариантах выполнения, в которых спутники 108 LEO реализованы при помощи спутников связи, спутники связи могут быть выполнены с возможностью поддержки сигналов связи, а также навигационных сигналов. В этом смысле такие навигационные сигналы могут быть реализованы для учета различных факторов, таких как подавление многолучевого распространения, точность определения дальности, взаимная корреляция, устойчивость к преднамеренным и случайным помехам и безопасность, включая избирательный доступ, меры противодействия радиолокационным ловушкам и низкую вероятность перехвата.
На Фиг.4 приведен подход к реализации сигналов 104 LEO в соответствии с вариантом выполнения изобретения. В частности, блоки 410, 420 и 430 на Фиг.4 иллюстрируют структуру сигналов, переданных и принятых спутниками 108 LEO, для обеспечения поддержки сигналам связи и навигационным сигналам, причем спутники 108 LEO реализованы при помощи существующих спутников связи системы Indium. В блоках 410, 420 и 430 частота отложена по горизонтальной оси, время течет в направлении вглубь страницы, а спектральная плотность мощности отложена по вертикальной оси.
В одном варианте выполнения спутник 108 LEO может быть выполнен с возможностью поддержки множества каналов, реализованных в виде множества интервалов 402 передачи и множества интервалов 404 приема, формируемых по типу множественного доступа с временным разделением каналов (TDMA) на кадре шириной 90 мс и затем формируемых по типу множественного доступа с частотным разделением каналов (FDMA) на полосе частот шириной 10 МГц. При этом следует понимать, что каждый канал может соответствовать определенному интервалу передачи или приема в кадре, представленном в определенном частотном диапазоне. Например, в одном варианте выполнения спутник 108 LEO может быть реализован для поддержки передачи приблизительно 960 каналов с 240 частотными диапазонами, обеспечивающими 4 временных интервала на кадр (например, 240 диапазонов частот × 4 временных интервала = 960 каналов).
Как показано в блоке 410, некоторые из интервалов 402 передачи и интервалов 404 приема могут относиться к существующим системами связи (например, на Фиг.4 это показано в виде телефонных вызовов 440). Используемые интервалы 402 передачи могут соответствовать данным, предоставляемым посредством сигнала 104А связи сигнала 104 LEO, переданного спутником 108 LEO.
Следует иметь в виду, что в варианте выполнения, показанном в блоке 410, множество интервалов 402 передачи остаются неиспользуемыми. В соответствии с различными вариантами выполнения изобретения неиспользуемая пропускная способность неиспользуемых интервалов 402 передачи может быть использована для поддержки навигационных сигналов в соответствии с тем, как описано в настоящем документе.
Как показано в блоке 420, в каждый из оставшихся неиспользованных интервалов 402 передачи может быть введен дальномерный перекрывающий сигнал 422 псевдослучайных помех (PRN). Дальномерным перекрывающим сигналом 422 можно управлять при низкой средней мощности на поканальной основе, но при этом совокупный дальномерный перекрывающий сигнал 422 обладает высокой мощностью для преодоления преднамеренных помех. Напротив, в блоке 430 показан дальномерный перекрывающий сигнал 422, реализованный при помощи узкого луча максимальной мощности, создаваемого спутником 108 LEO.
В одном варианте выполнения дальномерный перекрывающий сигнал 422 может быть реализован при помощи комбинации скачкообразного изменения частоты и прямой последовательности PRN. Для компонента скачкообразного изменения частоты может быть выбрано подмножество частот на псевдослучайной основе для каждого всплеска. Затем в каждом всплеске выбираются также на псевдослучайной основе биты данных.
В одном варианте выполнения телефонным вызовам 440 может быть предоставлен приоритет в интервале 402 передачи над дальномерным перекрывающим сигналом, при этом на дальномерный перекрывающий сигнал 422 почти не влияют редкие пропущенные или искаженные всплески. В другом варианте выполнения дальномерному перекрывающему сигналу 422 может быть предоставлен приоритет в интервале 402 над телефонными вызовами 440, при этом на телефонные вызовы 440 точно также почти не влияют редкие пропущенные или искаженные всплески.
В одном варианте выполнения дальномерный перекрывающий сигнал 422 может быть реализован с максимально широкой полосой пропускания, которую только допускают правила выделения диапазона частот. В этом случае могут использоваться все доступные каналы, и могут использоваться различные способы множественного доступа с частотным, временным или кодовым разделением каналов (CDMA) для создания сигнала нисходящей линии связи, который выглядит подобно плоскому белому шуму, если пользователь не знает код. Такая равномерность дает сигнал, который хорошо подходит для обеспечения точности, устойчивости к преднамеренным помехам и подавлению многолучевого распространения. Взаимная корреляция может быть сведена к минимуму при помощи соответствующего алгоритма шифрования, возможность реализации которого обеспечивает быстрая обработка цифрового сигнала в навигационном устройстве 102.
В одном варианте выполнения сигнал 104 LEO может быть реализован в виде комплексного сигнала s(t) от времени t, как показано в следующем уравнении:

В вышеуказанном уравнении А - амплитуда сигнала, n - индекс символа, р - значение псевдослучайного шума прямой последовательности, которая может быть ±1, h - импульсная характеристика символа, m - индекс частоты канала, f0 - диапазон широковещательной передачи с расширенным спектром, и N - число частот канала, формирующих диапазон широковещательной передачи с расширенным спектром.
В другом варианте выполнения, в котором спутники 108 LEO реализованы в виде спутников системы Globalstar, на каждом из каналов шириной 1,25 МГц может быть обеспечен маломощный код прямой последовательности, который ортогонален телефонному трафику.
На Фиг.5 приведена функция 502 автокорреляции, которая может быть реализована навигационным устройством 102 для соединения с сигналом 104 LEO в соответствии с вариантом выполнения изобретения. На Фиг.5 τ - аргумент автокорреляции, R - автокорреляционная функция основной импульсной характеристики символа по закону 40% корня из поднятого косинуса, N - число каналов, допустимое диапазоном, выделенным спутнику 108 LEO (например, максимум 240 в одном варианте выполнения), f0 - допустимая полоса частот (равная числу N, умноженному на расстояние между каналами, что дает f0=[41,667 кГц] N в одном варианте выполнения), a φm - смещение фазы спутника для каждого канала.
Кроме того, на Фиг.5 приведены графики 504 и 510 автокорреляционной функции 502 в различных масштабах. На графике 504 показана огибающая 506 автокорреляционной функции 502, образованная эффективной длиной корреляции данных прямой последовательности при 25 килоотсчетов в секунду. В этом варианте выполнения автокорреляция формируется совокупностью широкополосных каналов, разделенных на 41,667 кГц. Например, для широковещательной передачи шириной 10 МГц эффективная длина чипа прямой последовательности может быть длиной Y-кода, а именно 30 м. Для сравнения, на графике 510 приведены также грубый код/код обнаружения (С/А) 512 GPS и военный (М) код 514 GPS. Как показано на графике 510, боковыми лепестками автокорреляционной функции 502 управлять так же легко, как и лепестками М-кода 514 GPS. В этом смысле боковые лепестки автокорреляционной функции 502 либо сильно ослаблены, либо ясно различимы.
Как описано выше, сигнал 104 LEO может включать в себя различные навигационные сигналы, в том числе военный навигационный сигнал 104В, коммерческий навигационный сигнал 104С и гражданский навигационный сигнал 104D. Кроме того, навигационные устройства 102 могут быть выполнены с возможностью декодирования одного или нескольких из этих сигналов для осуществления навигации.
Например, на Фиг.6 приведен процесс декодирования военного навигационного сигнала 104В из сигнала 104 LEO в соответствии с вариантом выполнения изобретения. Следует иметь в виду, что процесс на Фиг.6 может быть выполнен навигационным устройством 102 в ответ на прием сигнала 104 LEO.
В различных областях применения желательно реализовать военный навигационный сигнал 104В в виде мощного сигнала для преодоления возможных преднамеренных помех. Соответственно, как показано на этапе 1 на Фиг.6, сигнал 104 LEO может включать в себя несколько параллельных каналов 602 (на Фиг.6 показано 12 каналов), выполненных с возможностью переноса военного навигационного сигнала 104В. В одном варианте выполнения можно использовать псевдослучайный процесс для определения конкретных каналов 602, задействованных для каждого всплеска широковещательной передачи от спутников 108 LEO. Кроме того, на этапе, приведенном на Фиг.6, для каждого параллельного всплеска на каналах 602 показана строка символов 604 с квадратурной фазовой модуляцией (QPSK), при этом ось времени проходит сквозь страницу. Символы 604 квадратурной фазовой модуляции модулированы при помощи кодирования прямой PRN-последовательности и также демонстрируют смещение и вращение, основанное на их частотном сдвиге в сигнале 104 LEO.
На этапе 2 на Фиг.6 PRN-кодирование подвергается дерасширению посредством поворота каждого всплеска в основную полосу частот, вычитания межканального смещения и удаления схемы прямой PRN-последовательности для создания ряда всплесков, переносящих данные, связанные с военным навигационным сигналом 104В, что представлено измененными QPSK-символами 606.
На этапе 3 на Фиг.6 данные с низкой скоростью передачи демодулируются в соответствии с набором М возможных ортогональных макросимволов 608. Если от QPSK-модуляции имеют место неоднозначности четверти цикла, то вместе неоднозначности и макросимволы могут не быть в точности ортогональными. После оценки данных посредством жесткого алгоритма решения удаляются оценочные данные, после чего остается только немодулированная несущая 610.
На этапе 4 на Фиг.6 несущая усредняется по всему всплеску и затем по каждому каналу. В результате можно получить синфазно-квадратурное измерение 612 мгновенной ошибки слежения. Затем используется система фазовой автоподстройки частоты (PLL) навигационного устройства 102 для слежения за несущей спутника.
На Фиг.7 приведена блок-схема коррелятора навигационного устройства 102, который можно использовать для выполнения процесса, приведенного на Фиг.6, в соответствии с вариантом выполнения изобретения. Генератор 702 колебаний с числовым управлением генерирует несущую, которая преобразует с понижением частоты поступающий сигнал 104 LEO (например, принятый через антенну навигационного устройства 102) к модулирующему сигналу 714. Модулирующий сигнал 714 поступает к верхнему тракту 704, который выполняет отслеживание несущей с точечным кодом. Модулирующий сигнал 714 поступает также к нижнему тракту 706, который обеспечивает дифференциальное обнаружение.
На нижнем тракте 706 банк синтезаторов 708 и PRN-генераторов 710 повторяет каждый канал сигнала 104 LEO. На верхнем тракте 704 повторяемые сигналы 712 смешиваются с модулирующим сигналом 714 для удаления всякого кодового и фазового вращения отдельно для каждого канала. Генератор 716 гипотез вычисляет сигнал, связанный с каждым из возможных макросимволов 608 и недонозначностей четверти цикла, если таковые имеются. Процессор 718 использует максимальный апостериорный алгоритм MAP для получения оценки 720 данных, указывающих, какая из гипотез макросимволов является наиболее правдоподобной. Как показано на чертеже, оценка 720 данных поступает на нижний тракт 706 для использования в дифференциальном обнаружении. Для выполнения точечного обнаружения в верхнем тракте 704 процессор 718 удаляет эти данные и подает полученные всплески в суммирующий блок 722, который интегрирует совокупные всплески в течение длительного времени, чтобы получить синфазно-квадратурную ошибку 724 отслеживания.
На нижнем тракте 706 повторяемые сигналы 712 дополнительно модулируются дифференциальным блоком 726 и блоком 728 генератора данных (с использованием оценки 720 данных, полученных от верхнего тракта 704). Как показано на чертеже, получающиеся модулированные сигналы суммируются с образованием составной копии дифференциального сигнала 730, который смешивается с модулирующим сигналом 714 и на суммирующий блок 732 для усреднения по времени с целью получения дифференциального дискриминатора 734. Соответственно, при условии фиксации несущей и достаточного интервала усреднения дифференциальный дискриминатор 734 дает критерий мгновенной ошибки отслеживания.
Фиг.8 иллюстрирует процесс декодирования коммерческого навигационного сигнала 104С в сигнале 104 LEO в соответствии с вариантом выполнения изобретения. Следует иметь в виду, что процесс на Фиг.8 может быть выполнен навигационным устройством 102 в ответ на прием сигнала 104 LEO.
Как показано на чертеже, процесс на Фиг.8 аналогичен процессу на Фиг.6, и этапы 1-4 на Фиг.8 в целом соответствуют этапам 1-4 на Фиг.6. Однако необходимо принять во внимание, что в процессе на Фиг.8 используется меньше каналов 802 (например, 2 канала в приведенном варианте выполнения) по сравнению с каналами 602 на Фиг.6. Из-за меньшего числа используемых каналов 802 коммерческий навигационный сигнал 104С в сигнале 104 LEO может быть реализован с меньшей мощностью и меньшей шириной полосы пропускания по сравнению с военным навигационным сигналом 104В.
На Фиг.9 приведен альтернативный процесс декодирования коммерческого навигационного сигнала 104С в сигнале 104 LEO в соответствии с вариантом выполнения изобретения. Как показано на чертеже, процесс на Фиг.9 аналогичен процессу на Фиг.8, и этапы 1-2 на Фиг.9 в целом соответствуют этапам 1-2 на Фиг.8. Однако на этапе 3 на Фиг.9 предполагается, что данные нисходящей линии связи (например, калибровочная информация) могут приниматься навигационным устройством 102 иным образом, нежели сигнал 104 LEO (например, по линии связи с опорной сетью 204 или с одним или несколькими узлами 310, приведенными на Фиг.3). Затем на этапах 4 и 5 на Фиг.9 может быть выполнена дальнейшая обработка соответственно аналогично этапам 3 и 4 на Фиг.8. Включение шага 3 в процесс на Фиг.9 позволяет обеспечить более высокую чувствительность при нахождении в помещении. В этом смысле навигационное устройство 102 может получать надежное представление данных нисходящей линии связи от одной или нескольких опорных станций опорной сети 204, не требуя от навигационного устройства 102 выполнения операции удаления данных нисходящей линии связи и (или) четверти цикла, что снижает объем обработки, требуемой от навигационного устройства 102, и выигрыш при обработке.
На Фиг.10 приведен процесс декодирования гражданского навигационного сигнала 104D в сигнале 104 LEO в соответствии с вариантом выполнения изобретения. В различных вариантах выполнения использование гражданского навигационного сигнала 104D может быть в целом сосредоточено на навигации только с несущей. В итоге гражданский навигационный сигнал 104D может быть реализован с относительно узкой полосой пропускания (например, приблизительно 1 МГц) и может быть общедоступен. При этом каналы 1002, используемые для гражданского навигационного сигнала 104D, могут быть реализованы без существенного расширения спектра. В этом смысле следует иметь виду, что каналы 1002, приведенные на этапе 1 на Фиг.10, сгруппированы близко друг к другу по сравнению с каналами 602 и 802, приведенными на этапе 1 на каждой из Фиг.6, 8 и 9. Следует иметь виду, что действие этапов 1-4 на Фиг.10 можно понять на основе действий этапов 1-4 на Фиг.6, рассмотренных ранее.
С учетом вышеприведенного рассмотрения следует понимать, что в некоторых вариантах выполнения военные, коммерческие и гражданские навигационные сигналы 104В, 104С и 104D в сигнале 104 LEO могут быть реализованы со следующими параметрами, указанными в таблице 3:
В другом варианте выполнения изобретения система 100 может быть реализована таким образом, чтобы позволять военное использование военного навигационного сигнала 104В и одновременно не допускать использования коммерческого и (или) гражданского навигационных сигналов 104С и 104D для противников в определенной зоне действий, не нарушая использование коммерческих и гражданских навигационных сигналов 104С и 104D вне зоны действий.
Например, в одном варианте выполнения декодирование коммерческого навигационного сигнала 104С может осуществляться при условии применения распределенного ключа шифрования, которому можно позволить утратить действие в зоне действий. В другом варианте выполнения широковещательная передача коммерческого навигационного сигнала 104С спутниками 108 LEO может выборочно прерываться в зоне действий (например, отдельные узконаправленные лучи от спутников 108 LEO можно независимо отключать).
В другом варианте выполнения коммерческий навигационный сигнал 104С и (или) гражданский навигационный сигнал 104D может быть локально заглушен в зоне действий. В этом смысле на Фиг.11 приведено сравнение между военным навигационным сигналом 104В, гражданским навигационным сигналом 104D и С/А-кодом 512 GPS и М-кодом 514 GPS.
Как показано на Фиг.11, С/А-код 512 GPS можно заглушить в военных целях, заглушая частотный диапазон С/А-кода. Как также показано на Фиг.11, гражданский навигационный сигнал 104D может рассматриваться как подмножество военного навигационного сигнала 104В как по спектральной плотности мощности, так и по ширине полосы пропускания. Если дальномерный перекрывающий сигнал 422 реализован при помощи FDMA и TDMA, то можно заметить, что гражданский навигационный сигнал 104D проявляет себя в всплесках со скачкообразным изменением частоты, как показано на Фиг.11.
На Фиг.12 приведена блок-схема устройства 1200 преднамеренных помех, которое можно использовать для выполнения локализованного глушения гражданских и коммерческих навигационных сигналов 104С и 104D в соответствии с вариантом выполнения изобретения. Как показано на Фиг.12, источник 1202 белого шума (например, созданное посредством броуновского движения) обрабатывается фильтром 1204 для получения шумового сигнала 1206 с шириной полосы пропускания, соответствующей приблизительно каналу передачи спутника 108 LEO.
Военное приемное устройство 1208, генератор 1210 и генераторы 1212/1214 колебаний выполнены с возможностью обеспечения множества каналов 1216, соответствующих имеющейся в данный момент частоте гражданского навигационного сигнала 104D, определяемой заданной, общедоступной гражданской PRN-последовательностью. Каналы 1216 используются для модуляции шумового сигнала 1206, который затем преобразуется с повышением частоты при помощи дополнительных приведенных компонентов для излучения всплесков преднамеренных помех в точности в такие моменты, такой продолжительности и такой частоты, которые соответствуют гражданскому навигационному сигналу 104D, принятому от спутников 108 LEO в качестве составной части сигнала 104 LEO. Следует иметь в виду, что вышеприведенный подход можно также использовать для создания предварительных помех коммерческого навигационного сигнала 104С, что может потребоваться в определенных вариантах реализации.
На Фиг.13 приведено представление в частотной и временной областях работы устройства преднамеренных помех на Фиг.12 в соответствии с вариантом выполнения изобретения. Как показано на Фиг.13, отдельные шумовые всплески 1302, создаваемые устройством 1200 преднамеренных помех, сосредоточены в узком частотном диапазоне 1304, соответствующем гражданскому навигационному сигналу 104D. При этом компоненты военного навигационного сигнала 104В (представленные темными прямоугольниками 1306) фактически остались неизменными и полностью доступны для военных действий.
Генерация дальномерного перекрывающего сигнала 422 в спутнике 108 LEO описана ниже со ссылкой на Фиг.14-17. Здесь различные процессы, описанные в отношении Фиг.14-17, могут быть выполнены соответствующими процессорами спутника 108 LEO. Кроме того, спутник 108 LEO может посредством соответствующих программных и аппаратных средств быть выполнен с возможностью модулирования и широковещательной передачи сигналов связи (например, всплесков телефонных сигналов) в формате QPSK.
На Фиг.14 приведен подход к генерации псевдослучайных помех в соответствии с вариантом выполнения изобретения. В варианте выполнения, приведенном на Фиг.14, используется генератор 1400 псевдослучайных чисел на основе счетчика. В этом смысле значение 1402 счетчика комбинируется со 128-битовым сеансовым ключом 1404 шифрования для обеспечения 128-битового шифра. Связывая значение 1402 счетчика с шифром 1406, можно построить различные PRN-элементы дальномерного перекрывающего сигнала 422. В одном варианте выполнения и входное значение 1402, и шифр 1406 можно реализовать в виде 128-битовых слов при помощи процесса улучшенного стандарта шифрования (AES).
Как показано в Фиг.14, каждое значение 1402 счетчика может включать в себя флаг 1412 типа, который определяет каждое значение 1402 счетчика как указывающее либо на выбор канала (например, если флаг 1412 типа установлен в "1") или чипы прямой последовательности (например, если флаг 1412 типа установлен в "0"). Если флаг 1412 типа установлен на выбор канала, то другие биты значения 1402 счетчика могут указывать каналы из совокупности 1408 выбора канала для передачи чипов всплесков широковещательно передаваемых данных. Если флаг 1412 типа установлен на прямую последовательность, то другие биты значения 1402 счетчика могут соответствовать индексу 1414 блока чипов (например, указывающему определенный чип из чипов 1410 прямой последовательности, который подлежит передаче) и отсчету 1416 всплеска (например, указывающему номер кадра определенного чипа 1410 прямой последовательности, который подлежит передаче).
В одном варианте выполнения шифр 1406 может применяться для выбора значения из совокупности 1408 случайных номеров для выбора канала, которая управляется скачкообразным изменением частоты. В другом варианте выполнения шифр 1406 может применяться для выбора чипов 1410 прямой последовательности, которые заполняют биты данных QPSK.
На Фиг.15 приведен процесс построения однородно распределенных из диапазона модулей от совокупности 1408 выбора канала в соответствии с вариантом выполнения изобретения. Следует иметь в виду, процесс на Фиг.15 может применяться совместно с совокупностью 1408 выбора канала, описанной выше в отношении Фиг.14.
На Фиг.16 приведен процесс преобразования совокупности 1408 выбора канала в список случайных неперекрывающихся каналов в соответствии с вариантом выполнения изобретения. Процесс на Фиг.16 можно использовать для военного навигационного сигнала 104В, коммерческого навигационного сигнала 104С и гражданского навигационного сигнала 104D посредством выбора различных параметров для М и N (приведенных на Фиг.16) в соответствии со значениями, даваемыми следующей таблицей 4:
На Фиг.17 приведена схема скачкообразного изменения частоты, генерируемая процессом на Фиг.16 в соответствии с вариантом выполнения изобретения. Как показано на Фиг.16, для последовательных всплесков передачи обеспечивается различный случайный выбор канала (связанный с соответствующими частотами передачи). Следует иметь в виду, что каждая частота и чип генерируются псевдослучайным образом при помощи общего ключа (например, 128-битовый ключа), заранее известного спутнику 108 LEO и навигационному устройству 102.
На Фиг.18-21 приведены различные аспекты навигационного устройства 102, которое может быть реализовано в соответствии с различными вариантами выполнения изобретения. Например, на Фиг.18 приведена блок-схема процессора 1800 приемника навигационного устройства 102, выполненного с возможностью приема и дискретизации сигналов для преобразования с понижением частоты в соответствии с вариантом выполнения изобретения. Как показано на Фиг.18, навигационные сигналы, принятые антенной 1802, фильтруются многополосными фильтрами 1804 (для предварительного выбора требуемых частотных диапазонов), усиливаются усилителем 1806 и дискретизируются схемой 1808 дискретизации и фиксации для обеспечения необработанных цифровых высокочастотных отсчетов 1816.
Процессор 1800 приемника включает в себя также генератор колебаний 1810 и синтезатор 1812, который может использоваться для синхронизации отсчета и фиксирующей схемы 1808. В различных вариантах выполнения частоту отсчетов схемы 1808 дискретизации и фиксации можно выбрать таким образом, чтобы не допустить перекрытия между фигурирующими под псевдонимами заранее выбранными частотными диапазонами.
Процессор 1800 приемника включает в себя также инерциальный измерительный блок (IMU) 1814, реализованный как трехосевой гироскоп и акселерометр MEMS, чьи метки времени измерения синхронизированы с общими часами приемника, и может использоваться для обеспечения необработанных цифровых отсчетов 1818 движения. Следует иметь в виду, что можно альтернативно использовать другие варианты реализации приемника для облегчения одинарного или многоэтапного преобразования с понижением частоты.
На Фиг.19 приведена блок-схема навигационного процессора 1900 навигационного устройства 102, выполненного с возможностью выполнения обработки дальномерных сигналов в соответствии с вариантом выполнения изобретения. Как показано на Фиг.19, блок 1902 преобразования Гилберта преобразует необработанные цифровые радиочастотные отсчеты 1816 в комплексные отсчеты 1904. Имеется множество отслеживающих модулей 1906. Каждый отслеживающий модуль 1906 связан со своим сигналом, содержащимся в комплексных отсчетах 1904, и может использоваться для слежения либо за спутниковыми, либо за наземными источниками дальномерных сигналов.
Навигационный процессор 1900 обеспечивает подачу команд 1908 на отслеживающие модули 1906 на основе необработанных цифровых отчетов 1818 движения, обработанных инерционным процессором 1916 и обобщенным калмановским фильтром 1914. Вспомогательная информация 1908 смещает отслеживающие модули 1906 на малую долю длины волны. Необработанные измерения 1910 кода и фазы несущей от отслеживающих модулей 1906 считываются в навигационный предварительный процессор 1912, обрабатываются обобщенным калмановским фильтром 1914 и объединяются для обеспечения засечки 1918 местоположения.
На Фиг.20 приведены различные определения переменных состояния, используемые обобщенным калмановским фильтром 1914 навигационного процессора 1900 в соответствии с вариантом выполнения изобретения.
На Фиг.20 уравнение 2002 представляет собой модель коррелятора интегрирования и сброса. Выходная ошибка отслеживания Δу моделируется посредством усреднения по времени Т разницы между фактической фазой и фазой, предсказанной фильтром. Уравнение 2004 представляет собой модель непрерывного обновления во времени полной навигационной системы, включающей в себя инерциальный блок, часы и все источники синхронизирующих и дальномерных сигналов как наземные, так и космические. Переменные вектора состояния оператора оценки представляют собой накопленную фазу коррелятора, местоположение пользователя, скорость, угловую ориентацию, смещение акселерометра, смещение гироскопа, смещение определения дальности, скорость смещения определения дальности, смещение часов, скорость смещения часов. Уравнение 2006 является моделью наблюдений фазы несущей, которая показывает опережение переноса времени к пользователю от опорного места с учетом геометрии и атмосферной ошибки.
На Фиг.21 приведена блок-схема одного из отслеживающих модулей 1906 в соответствии с вариантом выполнения изобретения. Отслеживающий модуль 1906 принимает команду 1908 опережения для выставления фазы кода и несущей для определенного дальномерного сигнала, отслеживающего отслеживающим модулем 1906. На первом этапе обработки преобразователь 1950 с понижением частоты поворачивает несущую, представленную в комплексных отсчетах 1904, к основной полосе частот. Затем преобразованный с понижением частоты сигнал 1952 расщепляется и передается к согласованному дифференциальному фильтру 1954 и к согласованному точечному фильтру 1956.
Форма сигнала для каждого дальномерного сигнала, находящегося в поле зрения, либо заранее сохранена в пользовательской памяти или, как вариант, обновляется по линии связи со спутником 108 LEO или с сетевым узлом (например, с узлом сотовой связи, WiFi, WiMAX или VII). Обновление по линии связи позволяет расширить архитектуру и использовать ее практически любым переданным сигналом. Эта импульсная характеристика (аналогичная PRN-коду для спутника GPS) образует основу для обработки согласованным фильтром. Импульсная характеристика наземного сигнала, такого как сигнал сотовой связи, WiFi, WiMAX, VII или телевизионный сигнал, может быть подстроена посредством сохранения детерминированной части опорного сигнала. Любая часть сигнала, которая содержит недетерминированные характеристики, такие как неизвестные данные, из опорного сигнала исключена. Затем на каждый из этих согласованных фильтров подается импульсная характеристика структуры опорного сигнала для реализации в согласованном фильтре/корреляторе. В результате фильтры 1954 и 1956 обеспечивают синфазное и квадратурное представления соответственно дифференциальных ошибок 1958 отслеживания и точечных ошибок 1960 отслеживания.
Можно использовать различные структуры данных для кодирования источников дальномерных сигналов в соответствии с различными вариантами выполнения изобретения. Например, в одном варианте выполнения дальномерный сигнал может быть представлен следующим кодом:
struct ranging_signal {/* обобщенные параметры источника дальномерных сигналов */ impulse_response broadcast_signal; /* структура сигнала от источника дальномерных сигналов */
double broadcast_frequency; /* частота источника дальномерных сигналов расположения */ position broadcast_location; /* фазовый центр источника дальномерных сигналов */ time broadcast_clock; /*смещение часов источника дальномерных сигналов */
};
В вышеприведенном коде форма опорного сигнала кодируется в виде параметра импульсной характеристики, начало времени отсчета которого привязано к часам широковещательной передачи. Частота широковещательной передачи - это частота несущей источника дальномерных сигналов. Местоположение широковещательной передачи кодируется в виде точных эфемерид для космических аппаратов и в виде декартовой статической координаты для наземных источников дальномерных сигналов. Коррекция часов калибрует источник дальномерных сигналов относительно системного времени, основанного на всемирном координированном времени (UTC) (например, предоставленном Обсерваторией военно-морских сил Соединенных Штатов Америки (USNO)).
В различных вариантах выполнения соответствующие наземные станции могут быть выполнены с возможностью расшифровки кодов новых дальномерных сигналов, применяемых спутниками 108 LEO, в близком к реальному масштабе времени. В этом отношении такие наземные станции могут передавать расшифрованные коды навигационным устройствам 102, тем самым позволяя навигационным устройствам 102 осуществлять навигацию с использованием практически любого сигнала, согласованно действующего или нет.
На Фиг.22-29 приведены различные варианты применения системы 100 для осуществления навигации в различных службах, действующих в различных средах, в соответствии с различными вариантами выполнения изобретения. Например, на Фиг.22 приведено применение системы 100 для обеспечения определения местоположения внутри помещения в соответствии с вариантом выполнения изобретения. В этом смысле следует иметь в виду, что на Фиг.22 навигационное устройство 102 может находиться внутри здания или другого строения.
Как показано на Фиг.22, навигационное устройство 102 (например, переносное пользовательское навигационное устройство) может принимать сигнал 104 LEO непосредственно от спутника 108 LEO и дополнительные дальномерные сигналы 318 от узлов 310. Показано также, что опорные станции опорной сети 204 также могут получать дальномерные сигналы 318. Как указано выше, опорная сеть 204 может быть снабжена соответствующими аппаратными или программными средствами для определения калибровочной информации, связанной с каждым источником 310 дальномерных сигналов, передаваемой на спутник 108 LEO по восходящей линии 320 связи, закодированной спутником 108 LEO в сигнале 104 LEO и передаваемой посредством широковещательной передачи на навигационное устройство 102 в качестве составной части сигнала 104 LEO. Калибровочная информация может затем использоваться навигационными устройствами 102 для обработки дальномерных сигналов 318 с целью осуществления навигации в сочетании измерением дальности, выполняемым при помощи сигнала 104 LEO. В результате навигационное устройство 102 может использовать сигнал 104 LEO и дальномерные сигналы 318 для осуществления навигации.
Военный навигационный сигнал 104В (например, предоставляемый спутником 108 LEO в качестве составной части сигнала 104 LEO) может, а также дальномерные сигналы 318 (например, предоставляемые источниками 310 дальномерных сигналов, такими как источники сигналов сотовой связи или телевизионных сигналов) могут быть реализованы виде сигналов высокой мощности, способных проникать сквозь строительные материалы и достигать навигационного устройства 102, находящегося внутри помещения. Соответственно, при использовании таких сигналов высокой мощности в подходе, приведенном на Фиг.22, навигационное устройство 102 может осуществить навигацию в помещении и быстро осуществить захват информации после холодного старта.
Фиг.23 иллюстрирует применение системы 100 для обеспечения определения местоположения внутри помещения в соответствии с другим вариантом выполнения изобретения. Следует иметь в виду, что вариант реализации, приведенный на Фиг.23, в целом соответствует рассмотренному выше варианту реализации на Фиг.22. Однако в варианте выполнения, приведенном на Фиг.23, навигационное устройство 102 может также дополнительно осуществлять связь с опорной сетью 204 или с узлами 312 или 314 через сеть 316.
Кроме того, система 100 может быть выполнена с возможностью использования обработки коммерческих сигналов с привязкой, как описано со ссылкой на Фиг. 8. В этом случае коммерческий навигационный сигнал 104С с более низкой мощностью можно использовать для получения большего выигрыша при обработке посредством передачи копии навигационных данных, закодированных в коммерческом навигационном сигнале 104С поверх дальномерных сигналов 318. Поскольку в процессе на Фиг.8 навигационные данные удаляются, ширину полосы пропускания контура слежения можно значительно уменьшить.
В одном варианте выполнения навигационное устройство 102 может определить окончательную засечку своего положения посредством формирования вектора псевдодальностей для каждого источника дальномерных сигналов, k, с последующей линераризацией относительно начального приближения для положения пользователя, х, и смещения часов пользователя τ.


Для уточнения оценки положения пользователя применяется метод наименьших квадратов:
В другом варианте выполнения система 100 может быть реализована для обеспечения высокоточной, высокодостоверной навигации. В этом отношении Фиг.24 иллюстрирует применение системы 100 для осуществления навигации при помощи сигналов 106 GPS и двухдиапазонных сигналов 104 и 104' LEO в соответствии с вариантом выполнения изобретения. В частности, на Фиг.24 показано, как можно использовать одночастотный сигнал GPS L1 с двумя различными сигналами 104 и 104' LEO (например, с различными сигналами LEO в разных частотных диапазонах от разных спутников 108 и 108' LEO) для обеспечения высокого качества навигации. В варианте выполнения, приведенном на Фиг.24, достаточно несущих сигналов 106 GPS и сигналов 104 и 104' LEO - фазы кода от сигналов использовать не нужно. Однако в другом варианте выполнения используются как код, так и несущая для получения максимальной информации из доступных наблюдаемых величин.
На Фиг.24 станции опорной сети 204 могут контролировать сигналы 106 GPS и сигналы 104 и 104' LEO и собирать информацию о непрерывной фазе несущей для определения точной орбиты спутников 202 GPS и спутников 108 LEO. При использовании различных сигналов 104 и 104' LEO можно исключить влияние ионосферы и выдать сигнал фазы несущей, в котором отсутствует влияние ионосферы. Можно оценить циклические неоднозначности всех спутников 202 GPS и спутников 104 и 104' LEO (например, изображенные эллипсоидами 2402), воспользовавшись большой угловой скоростью спутников 104 и 104' LEO.
Положение навигационного устройства 102 (например, самолета в данном варианте выполнения) можно определить на Фиг.24 таким же образом, который был подробно описан выше со ссылкой на Фиг.22-23. В частности, нижеприведенная запись дает k-e измерение псевдодальности для определения положения пользователя х в интервал времени m и при тропосферной зенитной задержке DZ вместе со всеми смещениями определения дальности спутников, смоделированными в виде непрерывной переменной b.
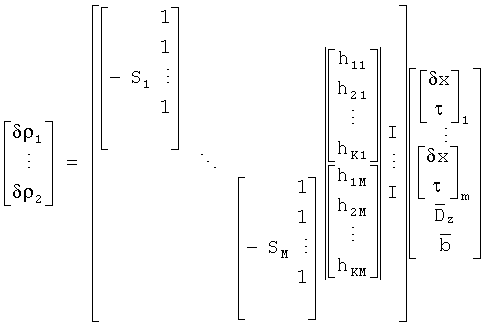
Вновь используется метод наименьших квадратов для решения системы уравнений для корректировок положения, смещений по времени и вектора смещений определения дальности. Несмотря на то что измерения с использованием сигналов 106 GPS являются одночастотными и подвержены ионосферному смещению, в получающемся в результате решении ионосферная зависимость отсутствует. Поскольку измерения с использованием сигналов 104 и 104' LEO лишены ионосферной зависимости и поскольку спутники 104 и 104' LEO имеют высокую угловую скорость (по сравнению с практически нулевой угловой скоростью спутников 202 GPS) матрица геометрии является матрицей полного ранга за исключением синфазного режима между часами и смещениями определения дальностей. Это означает, что оценки смещений для спутников 202 GPS принимают значения, которые правильно определяют положение пользователя на основе измерений, лишенных ионосферной зависимости, при помощи 104 и 104' LEO.
Фиг.25 иллюстрирует применение системы 100 для осуществления навигации при помощи сигналов 106 GPS и одного сигнала 104 LEO в соответствии с вариантом выполнения настоящего изобретения. Геометрия орбиты единственного спутника 108 LEO, находящегося в пределах видимости, стремится поместить спутник 108 LEO на траекторию, которая совмещает эллипсоид 2502 неопределенности положения с локальной горизонталью. Помимо сигнала 104 LEO и сигналов 106 GPS навигационным устройством 102 (например, самолетом в данном варианте выполнения) может дополнительно использоваться третий сигнал 2504 (например, от спутника 306 системы Galileo или от другого спутника) для определения своего положения.
Достоверность навигационной системы можно измерить по способности системы своевременно предупреждать пользователей, когда ее не следует использовать. В этом смысле риск недостоверности можно охарактеризовать как вероятность необнаруженной опасной аномалии навигационной системы. В одном варианте выполнения система 100 может быть реализована для обеспечения высокой достоверности при помощи автономного контроля достоверности приемника (RAIM). В вариантах реализации RAIM навигационное устройство 102 может быть выполнено с возможностью контроля самосогласованности измерений для обнаружения навигационных ошибок, связанных с отказами различного характера. Быстрое движение спутников 108 LEO может облегчить такие измерения.
При помощи RAIM погрешность аппроксимации методом наименьших квадратов используется для проверки гипотезы отказа системы методом хи-квадрат. В этом случае можно использовать следующую формулу:
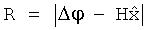
В вышеприведенной формуле φ соответствует дальномерным измерениям, Н соответствует матрице геометрии спутника, а  соответствует оценке положения. После определения каждой засечки положения навигационное устройство 102 может быть выполнено с возможностью вычисления измерения погрешности R. Если R меньше порогового значения, то считается, что система 100 работает надлежащим образом. Если R больше или равно пороговому значению, навигационное устройство 102 может выдать предупреждение о нарушении достоверности.
соответствует оценке положения. После определения каждой засечки положения навигационное устройство 102 может быть выполнено с возможностью вычисления измерения погрешности R. Если R меньше порогового значения, то считается, что система 100 работает надлежащим образом. Если R больше или равно пороговому значению, навигационное устройство 102 может выдать предупреждение о нарушении достоверности.
На Фиг.26 приведено влияние ошибки определения дальности на решение об определении положения в соответствии с вариантом выполнения изобретения. Обычно дальномерные измерения являются самосогласованными. Однако если одно или несколько измерений являются искаженными или смещенными, эта ошибка может увести от истины результирующее решение. RAIM в состоянии обнаружить ошибку, поскольку несогласованность между измерениями сильно коррелирована с фактической ошибкой положения.
На Фиг.27 показано, как точность фазы несущей системы уравновешивает геометрию, которая характеризуется затемнениями и снижением точности (DOP). В двумерном случае аппроксимация методом наименьших квадратов исключает вертикальную компоненту ошибки положения. В одном варианте выполнения система 100 может быть предпочтительно реализована с сантиметровой точностью фазы несущей для обеспечения надежной навигации во время затемнения. Как показано на чертеже в процессе, приведенном на Фиг.27, можно также использовать заранее подготовленную карту высот.
Фиг.28 иллюстрирует применение системы 100 для осуществления навигации при помощи сигналов, принятых непосредственно от спутника 108 LEO и спутников 202 GPS в соответствии с вариантом выполнения. На Фиг.29 приведен аналогичный вариант выполнения, что и на Фиг.28, но с добавлением сети 316 и дальномерных сигналов 318, чтобы кратковременные прерывания сигналов 104 LEO и сигналов 106 GPS не повлияли на непрерывность обслуживания.
Как описано выше, система 100 может быть выполнена с возможностью поддержания восходящей линии 320 передачи данных от опорных станций опорной сети 204 для облегчения навигации, осуществляемой навигационными устройствами 102 с использованием сигналов 104B/104C/104D. Восходящая линия 320 передачи данных может также поддерживаться надлежащим образом сконфигурированными навигационными устройствами 102. В этом случае восходящая линия 320 передачи данных может также применяться для передачи любых требуемых данных от опорной сети 204 и (или) навигационных устройств 102 к спутнику 108 LEO для последующей широковещательной передачи в качестве составной части сигнала 104А связи в сигнале 104 LEO.
Поскольку от функции точного времени систем 100 доступны время GPS и UTC, возможно установить односторонний протокол восходящей линии связи, который обеспечивает восходящую линию 320 передачи данных без прямой двухсторонней синхронизации. Время и частотная фазировка восходящей линии 320 передачи данных могут быть заранее установлены таким образом, чтобы поступать на спутник 108 LEO в точном соответствии с мгновенной фазой несущей и структурой кадров на посимвольной основе. При наличии подходящего протокола множественного использования можно обеспечить совместное использование канала восходящей линии многими навигационными устройствами 102. Такой протокол множественного использования может быть реализован посредством времени, частоты, кода или любого сочетания вышеперечисленного. В одном варианте выполнения восходящая линия 320 передачи данных может быть выполнена в виде восходящей линии с расширенным спектром с устойчивостью к преднамеренным помехам и низкой вероятностью перехвата и обнаружения (LPI/D). В другом варианте выполнения маломощные сигналы на восходящей линии 320 данных могут суммироваться по многим символам для извлечения совокупного макросимвола из шума и обеспечения восходящей линии с LPI/D.
На Фиг.30 приведена обобщенная структура цикла для всплесков 3002 данных на восходящей линии связи 320 к спутнику 108 LEO в соответствии с вариантом выполнения изобретения. В одном варианте выполнения восходящая линии 320 передачи данных может быть выполнена с возможностью поддержки всплесков данных на восходящей линии связи примерно на 240 каналов при 414 битах на всплеск. Для совмещения надлежащим образом восходящей линии 320 передачи данных на посимвольной основе в одном варианте выполнения структура кадра спутника 108 LEO может быть заранее помещена в состояние покоя (например, при отсутствии смещения по времени и смещения по частоте относительно основных часов спутника 108 LEO). В другом варианте выполнения опорная станция опорной сети 204 может быть выполнена с возможностью генерации соответствующего синхронизирующего сигнала для восходящей линии 320 передачи данных к спутнику 108 LEO. Смысл этого синхронизирующего сигнала заключается в предварительном совмещении структуры кадра для символов данных во всплеске относительно репера UTC и времени GPS.
На Фиг.31 приведена наземная инфраструктура для синхронизации восходящей линии 320 передачи данных в соответствии с вариантом выполнения изобретения. В частности, наземная инфраструктура на Фиг.31 включает в себя опорную станцию опорной сети 204, которая может использоваться для совмещения поля 3104 полезной нагрузки каждого всплеска 3002 данных. В одном варианте выполнения опорная станция может быть выполнена с возможностью не осуществлять широковещательную передачу во время части всплеска, выделенной для полезной нагрузки 3104 (это время зарезервировано за навигационными устройствами 102). В одном варианте выполнения каждое из навигационных устройств 102 может быть уполномочено передавать по восходящей линии связи один символ в определенном временном и частотном интервале. Таким образом, каждый символ (или каждый ортогональный бит в структуре кадра на восходящей линии связи QPSK) снабжен индивидуальной адресацией навигационным устройством 102, которое знает его положение и время UTC/GPS. Навигационные устройства 102 могут быть реализованы при помощи любого подходящего протокола множественного использования, в соответствии с которым навигационным устройствам 102 выделены биты в определенных полях. Например, согласно протоколу CDMA множество навигационных устройств 102 могут даже совместно использовать одни и те же биты.
В различных вариантах восходящая линия 320 передачи данных может быть реализована с маломощными сигналами. Например, в одном варианте выполнения восходящая линия 320 может быть реализована с использованием широковещательной передачи на миливаттном уровне для передачи нескольких битов данных в секунду к спутнику 108 LEO. Если эта мощность распределена, например, по полосе пропускания 10 МГц, то спектральная плотность полученного потока мощности является приемлемой для областей применения LPI/D. Такая реализация восходящей линии 320 с расширенным спектром может также обеспечивать защиту от преднамеренных помех.
На Фиг.32 приведен вариант выполнения сигнала с низким уровнем, используемого для восходящей линии 320 передачи данных в соответствии с вариантом выполнения изобретения. В одном варианте выполнения спутник 108 LEO может быть выполнен с возможностью приема каждого бита в модуляции QPSK вместе с фоновым шумом. Поскольку QPSK можно синтезировать из двух ортогональных потоков двоичной фазовой манипуляции (BPSK), на Фиг.32 приведено упрощенное распределение вероятности BPSK (пара смещенных распределений Гаусса). Обычно детектор в демодуляторе спутника 108 LEO принимает решение "1" или "0" (обозначенное в данном случае как -1) на основе порогового значения в нуле, и вероятность ошибки в символе вычисляется посредством интегрирования площади под гауссианом в зависимости от отношения сигнал-шум.
В одном варианте выполнения демодулятор рассматривается в качестве жесткого амплитудного ограничителя. Когда отношение сигнал-шум много меньше единицы, представительной является центральная кривая Гаусса, приведенная на Фиг.32. Наличие сигнала (то есть, бита данных) лишь немного смещает кривую от одной стороны к другой, но в целом выходной сигнал забит помехами. Однако посредством усреднения многих дискретных отсчетов спутник 108 LEO может обнаружить появление сигнала. Вычисления, известные специалистам в данной области техники, устанавливают потери жесткого ограничителя на уровень примерно 2 дБ. Иными словами, за исключением эффективных потерь преобразования аналогового сигнала в цифровой на уровне 2 дБ входной сигнал полностью сохраняется, даже если спутник 108 LEO первоначально был реализован в качестве спутника связи. Вышеупомянутый подход не ограничивается конкретным выполнением спутника 108 LEO.
В различных вариантах выполнения обработка битов данных может быть выполнена опорной сетью 104, навигационным устройством 102 или на спутнике 108 LEO. В другом варианте выполнения можно использовать специально сконструированные демодуляторы с мультибитным высокочастотным блоком для устранения 2 дБ потерь жесткого ограничителя в спутниках 108 LEO, реализованных с аналоговыми конфигурациями типа "прямая дыра".
На Фиг.33 приведена блок-схема передатчика 3300, выполненного с возможностью поддержки восходящей линии 320 передачи данных в соответствии с вариантом выполнения изобретения. В этом отношении следует иметь в виду, что передатчик 3300 может быть составной частью опорной станции опорной сети 204 или составной частью одного или нескольких навигационных устройств 102. Например, в одном варианте выполнения передатчик 330 может входить в состав карманного оборонного усовершенствованного приемного GPS-устройства (DAGR), сотового телефона или любого другого компактного дешевого устройства. Такие навигационные устройства 102 предпочтительно могут быть выполнены с возможностью обеспечения отправки текстовых сообщений и сообщений о статусе с малым временем запаздывания из любого места в мире по восходящей линии 320 передачи данных для дальнейшей широковещательной передачи по сигналу 104А связи.
Как показано на Фиг.33, положение и часы навигационного устройства 102 (например, обеспеченные в соответствии с навигационным решением 3302) и положение и смещение часов спутника 108 LEO (например, обеспеченные навигационным предварительным процессором 1912) вычитаются друг из друга для получения априорного параметра опережения τ0, используемого, как показано на чертеже, блоком 3308 вычисления опережения. В этом случае τ0 соответствует времени упреждения, к которому должна быть выполнена передача отдельного бита данных dnm для поступления на спутник 108 LEO точно в верное время и с точной фазировкой.
Параметр опережения затем управляет синтезом сигнала в процессоре основной полосы частот. Данные, подлежащие передаче по восходящей линии связи, кодируются и шифруются в блоке 3304 в соответствии с предпочтениями пользователя. Блок 3306 модулятора данных генерирует импульсы 40% корня приподнятого косинуса, которые модулируются соответствующим битом данных, PRN-кодом прямой последовательности и смещением частоты канала, выдаваемых блоком 3310 PRN-генератора и блоком 3312 синтезатора. Можно параллельно обрабатывать любое требуемое число каналов. Сигналы суммируются, подвергаются преобразованию с повышением частоты (в этом случае до 100 МГц), преобразуются к реальной форме, преобразуются из цифровых в аналоговые и преобразуются с повышением до высокой частоты для широковещательной передачи, как показано блоками 3316-3324 на Фиг.33.
Для компактной и маломощной работы компонент основной полосы частот может быть реализован таким образом, чтобы находиться в модифицированном реальном участке основного диапазона в DAGR или сотовом телефоне. В одном варианте выполнения антенна 3324 может также использоваться для сигналов GPS в DAGR или в сотовом телефоне. В одном варианте выполнения потребляемая мощность и размеры оборудования для широковещательной передачи по восходящей линии связи могут быть реализованы таким образом, чтобы подходить для телефона или для компактного устройства. Например, в одном варианте выполнения такое передающее оборудование может быть реализовано на основе чипа RF2638, поставляемого компанией RF Micro Devices, который обеспечивает высокочастотную выходную мощность на уровне 10 дБ по отношению к 1 мВт и требует 25 мА при напряжении 3 В.
На Фиг.34 приведена блок-схема различных компонентов 3400 спутника 108 LEO, выполненного с возможностью поддержки восходящей линии 320 передачи данных в соответствии с вариантом выполнения изобретения. В одном варианте выполнения спутник 108 LEO может быть выполнен с возможностью приема импульсов с битами данных через антенну 3402 и приемный блок 3404 и заполнения внутренней структуры кадра полученным в результате решением, а именно +1 или -1. Блок 3406 PRN-генератора дает команду на скачкообразное изменение частоты на восходящей линии по схеме, заранее известной как навигационному устройству 102, так и спутнику 108 LEO. Блок 3408 PRN-генератора применяет также к поступающим битам PRN-код прямой последовательности. Формы сигналов, связанные с различными гипотезами макросимволов (выдаваемые блоком 3410 генератора гипотез), смешаны с поступающим сигналом и затем обрабатываются процессором 3412 (например, так, как описано выше в отношении процессора 718), для обеспечения результирующего сообщения 3414 данных. Как в случае сигнала 104 LEO, также описанного в настоящем документе, ортогональное кодирование обеспечивает превосходное значение спектральной плотности отношения энергии к шуму (Eb/N0) для восходящей линии 320 передачи данных.
Восходящая линия 320 передачи данных содержит также встроенный дальномерный сигнал благодаря модуляции с PRN-кодированием. Дополнительно в спутнике 109 LEO может быть предусмотрена система автоматической подстройки по задержке (DLL) для оценки дальности от навигационного устройства 102 до спутника 108 LEO. В результате возможно выполнить обратную триангуляцию и использовать множество спутников 108 LEO для пассивной триангуляции положения навигационного устройства 102.
Система 100 выгодно может применяться для обеспечения требуемых характеристик в различных областях применения. Например, в одном варианте выполнения система 100 может быть реализована для обеспечения быстрой направленной смены ключей. При помощи инфраструктурных методов с открытым-закрытым ключом в системе 100 навигационные устройства 102 могут быть аутентифицированы с использованием двухсторонней линии передачи данных до передачи зашифрованных ключей обмена по беспроводной линии. Таким образом, может поддерживаться надежный контроль над определенным пользователем, приемником, местом и временем смены ключей.
В другом варианте выполнения система 100 может быть реализована для получения сведений об обстановке с объединенными силами противника. В этом случае навигационные устройства 102 могут делиться информацией о положении с другими находящимися поблизости дружественными силами, и обмен информацией об опасных областях и местоположении противника может осуществляться в реальном времени.
В еще одном варианте выполнения система 100 может быть реализована для навигационной связи и управления воздушным движением. В этом случае навигационные устройства 102 могут быть выполнены на летательном аппарате (например, вместо антенны и платы GPS в многорежимом приемнике (MMR) летательного аппарата) для обеспечения посадки категории III, встроенной линии связи, комплексного автоматического зависимого наблюдения и комплексного управления воздушным движением на основе космических данных.
В еще одном варианте выполнения система 100 может быть реализована для поддержки поисково-спасательных операций. В этом случае навигационные устройства 102 могут быть выполнены с возможностью обеспечения глобальных характеристик Е911 как для военных, так и для гражданских целей. Характеристики LPI/D военного варианта восходящей линии 320 передачи данных позволяют приспособить модифицированное устройство DAGR для применения во враждебных условиях.
В другом варианте выполнения система 100 может быть реализована для поддержки перенацеливания на маршруте. В этом случае управляемым средствам поражения можно давать команды и можно осуществлять их перенацеливание в реальном времени при помощи команд, подаваемых модифицированным устройством DAGR.
В еще одном варианте выполнения система 100 может быть реализована для поддержки оценки повреждений боевой техники. В этом случае информация, собранная от людей или от датчиков, может быть быстро объединена через восходящую линию 320 передачи данных. В другом варианте выполнения система 100 может быть реализована для поддержки того, чтобы можно было объединять информацию о погоде, коррелированную по местоположению.
В еще одном варианте выполнения система 100 может быть реализована для обеспечения объединения измерений сетью навигационных устройств 102 мощности преднамеренной помехи, или полезного времени, или частотных особенностей в устройстве преднамеренных помех для определения методом триангуляции их точного местоположения.
В еще одном варианте выполнения система 100 может быть реализована для поддержки управления узким лучом. В этом случае объем полномочий по управлению мощностью узкого луча может быть передан навигационным устройствам 102. Например, при наличии преднамеренной помехи навигационные устройства 102 могут быть выполнены с возможностью запрашивать увеличение в реальном времени мощности широковещательной передачи сигнала 104 LEO. Такой вариант реализации может быть сделан доступным для военных и гражданских пользователей, осуществляющих спасательные операции, причем объем полномочий определяется государственной политикой.
В еще одном варианте выполнения система 100 может быть реализована для поддержания глобального обмена текстовыми сообщениями в системе сотовой связи. Например, в навигационном устройстве 102 (например, в модифицированном устройстве DAGR или в мобильном телефоне) может быть предусмотрена возможность установления восходящей линии 320 передачи данных для обеспечения пересылки текстовых сообщений к любому месту и от любого места по всему миру.
Описанные выше варианты выполнения иллюстрируют, но не ограничивают изобретение. Следует понимать, что возможны многочисленные модификации и видоизменения в соответствии с принципами настоящего изобретения. Соответственно, объем изобретения определяется только нижеследующей формулой.
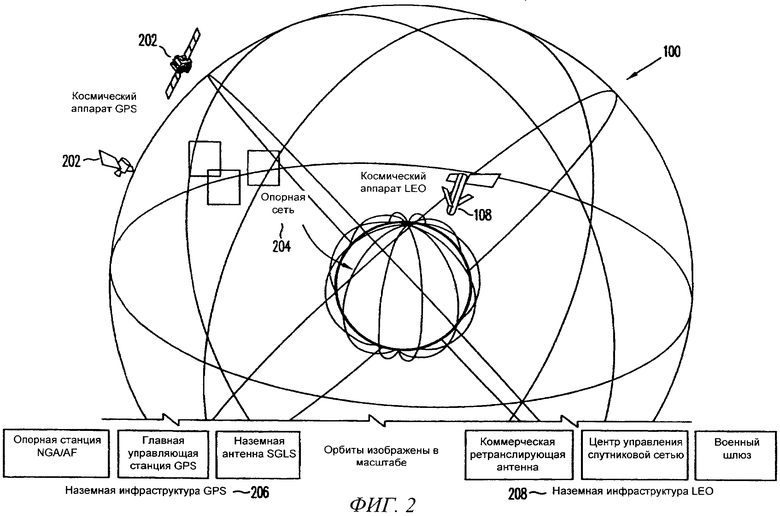
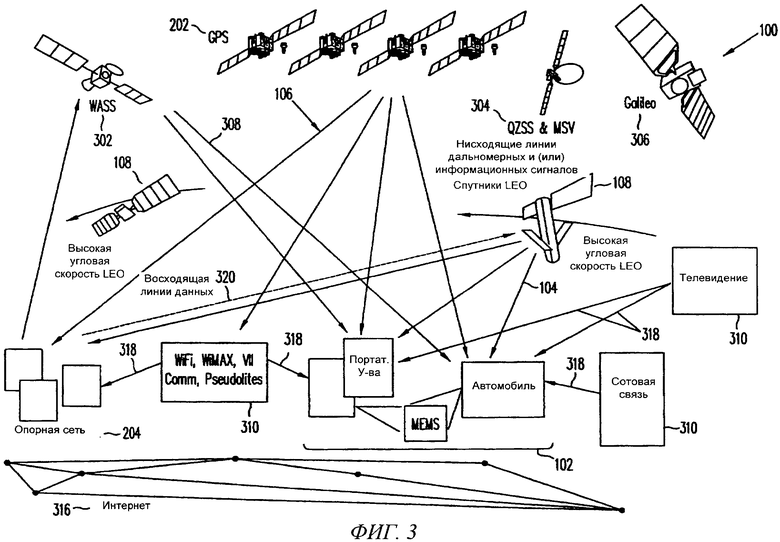
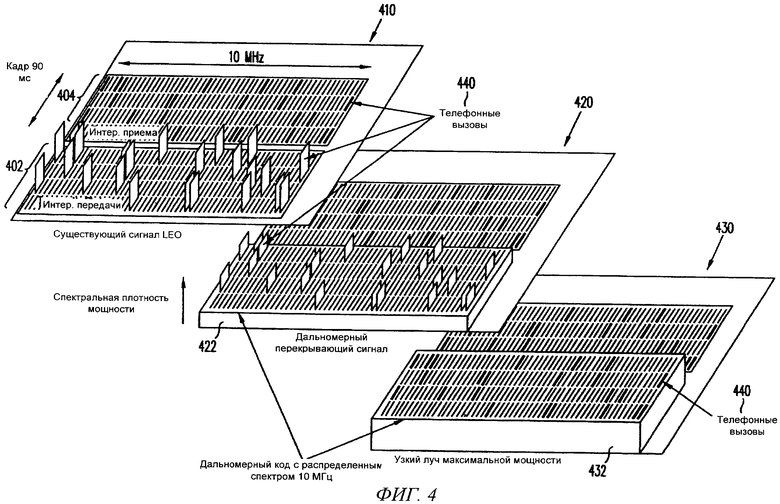
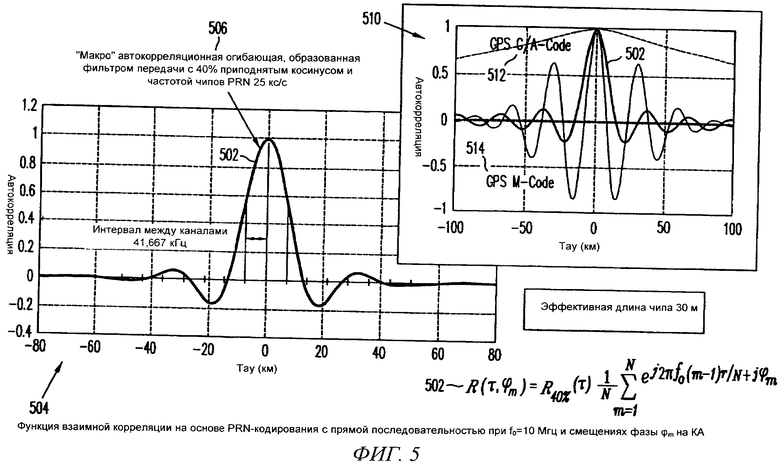
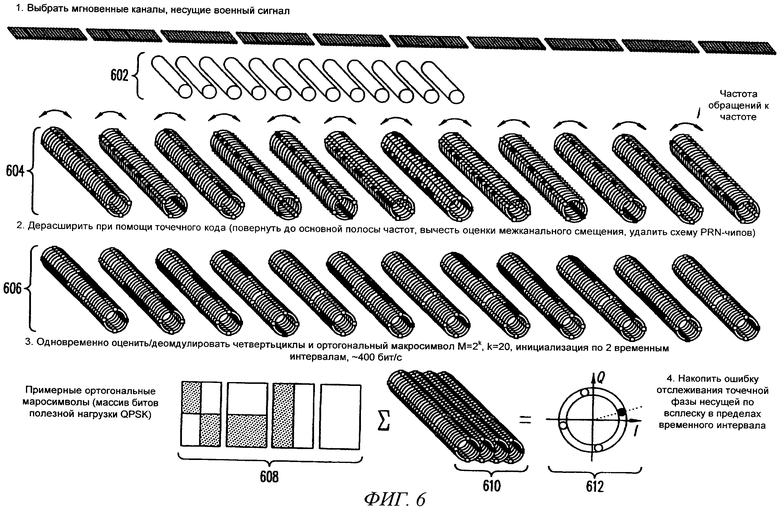

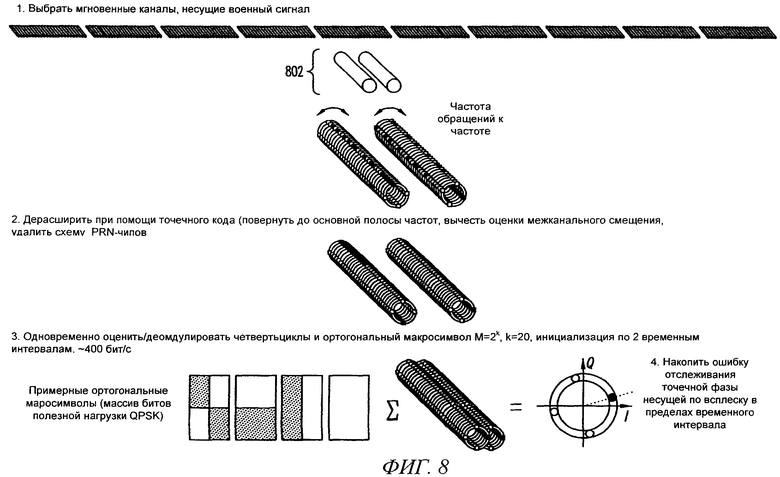
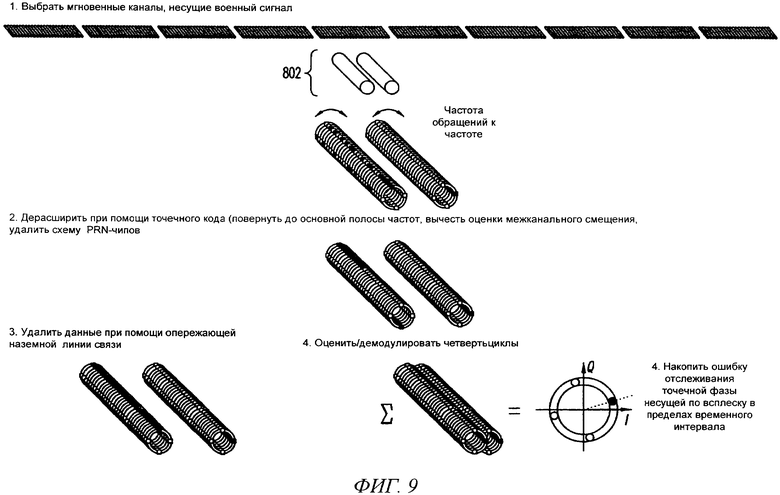

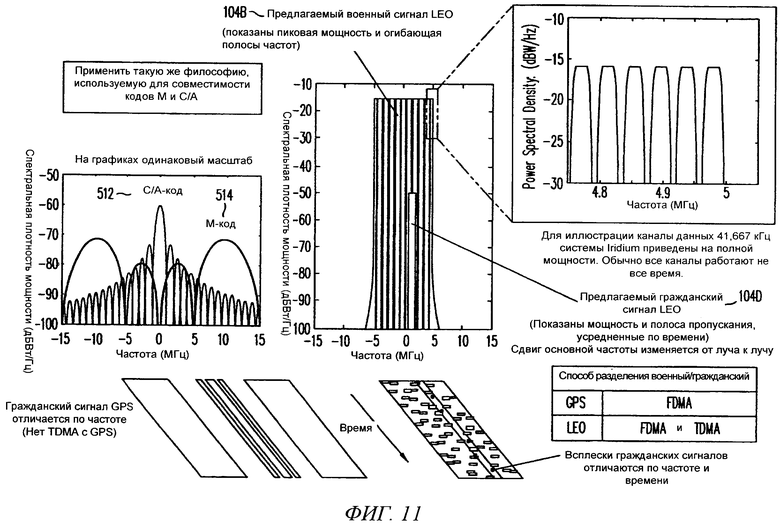
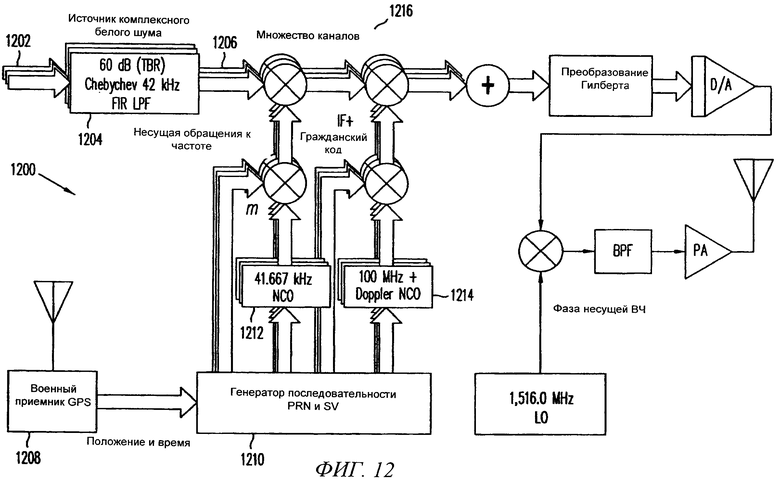
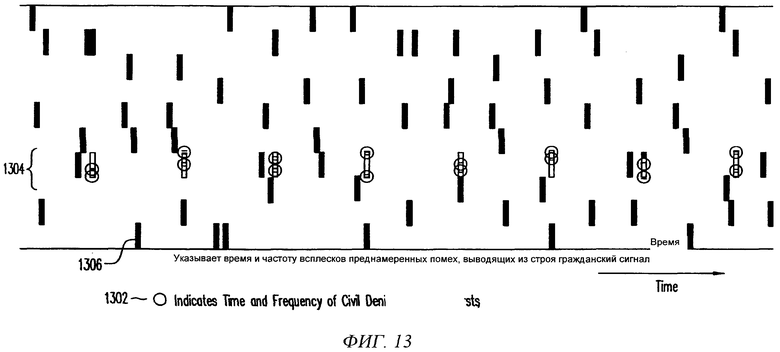
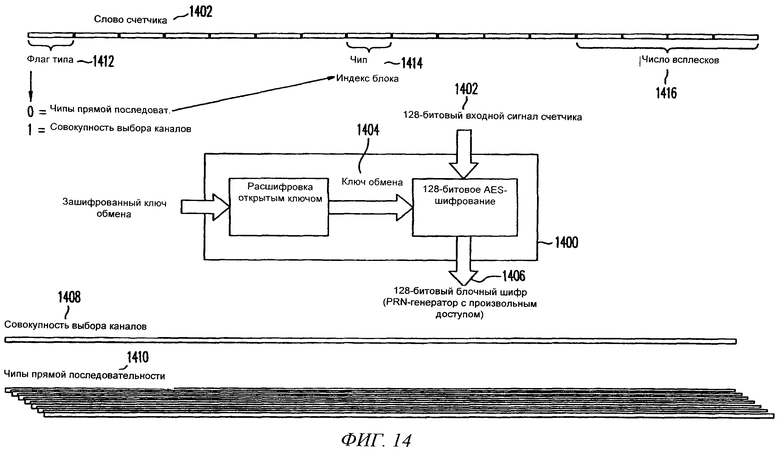
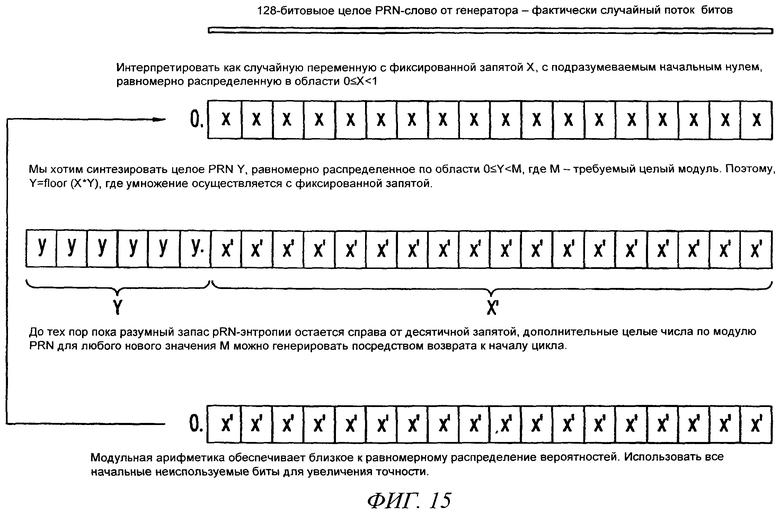
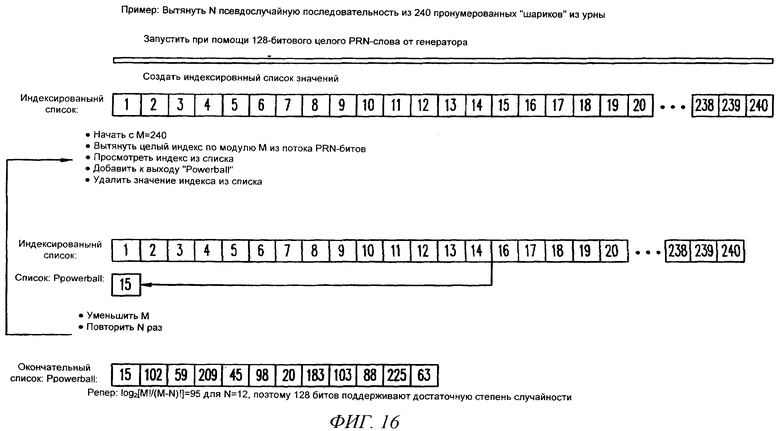
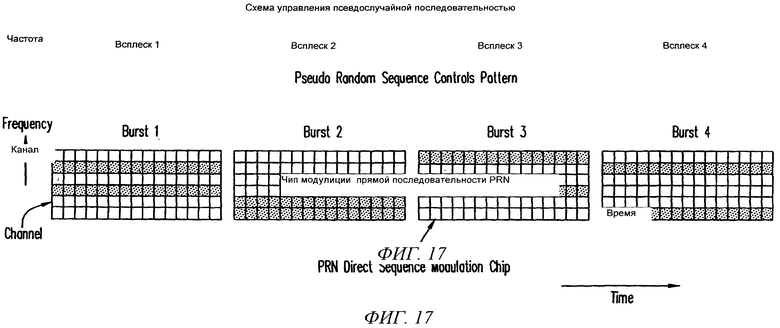
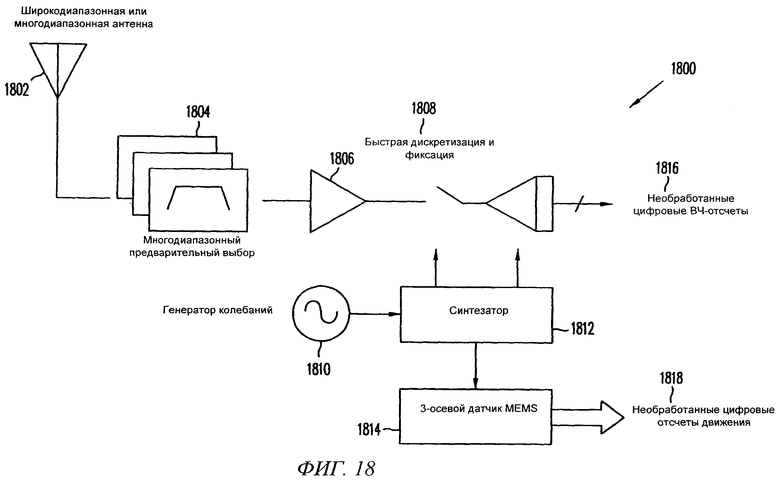
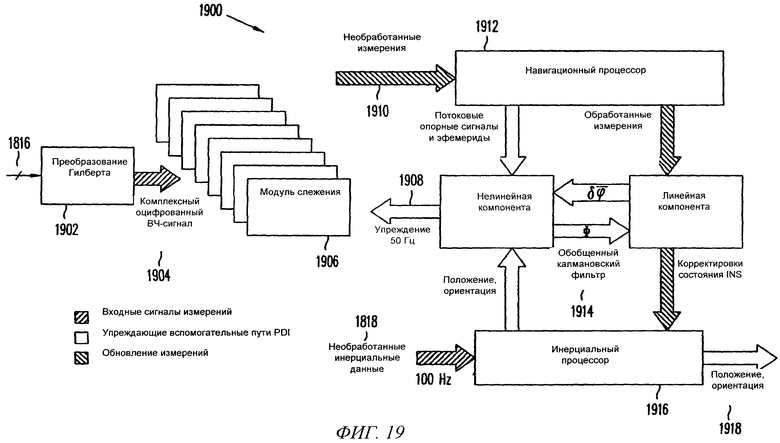
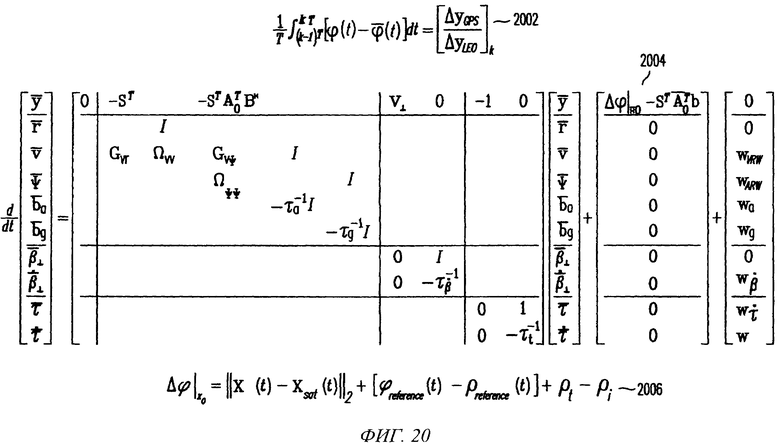
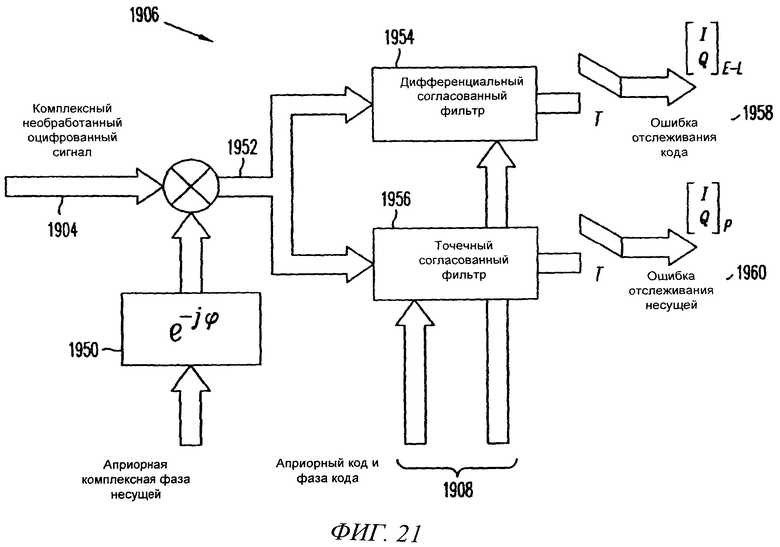


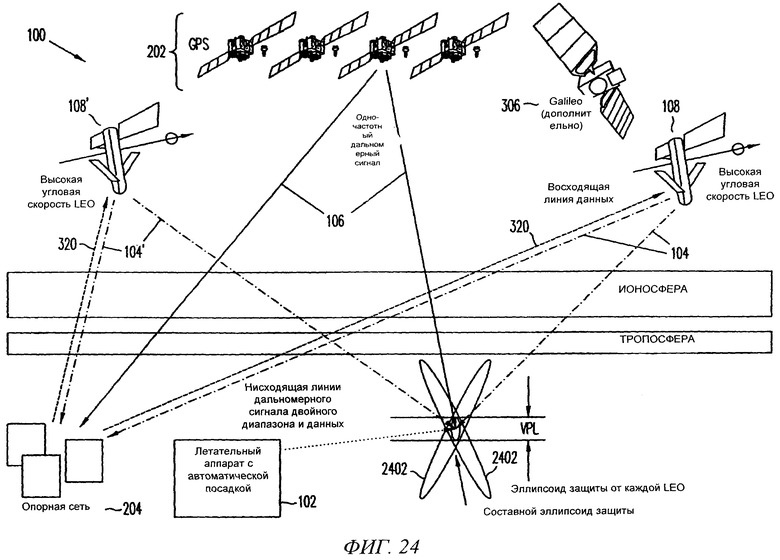
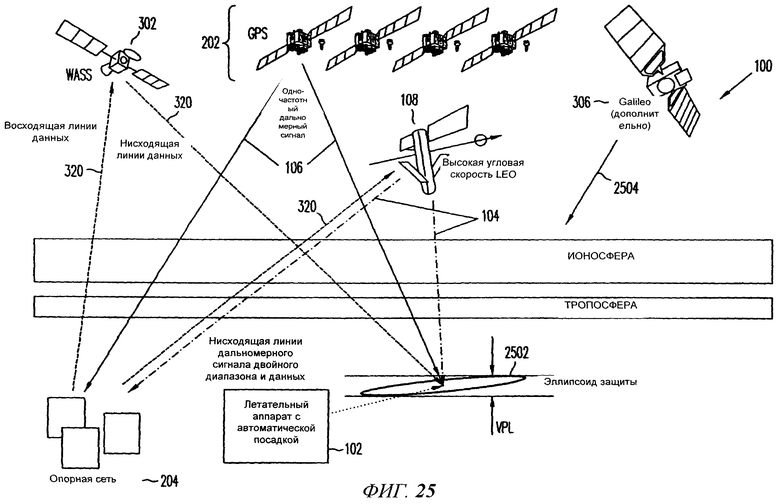
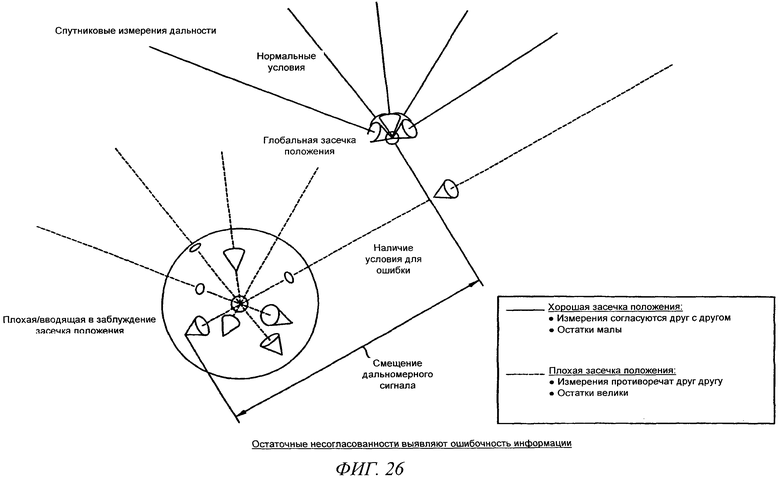
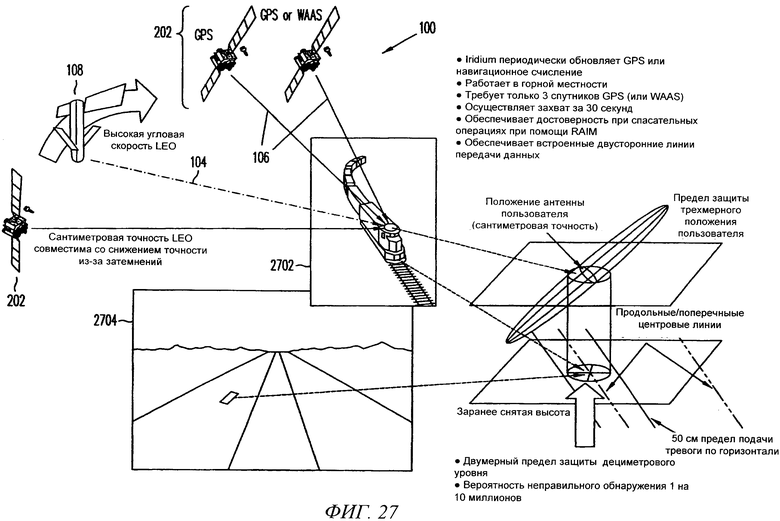
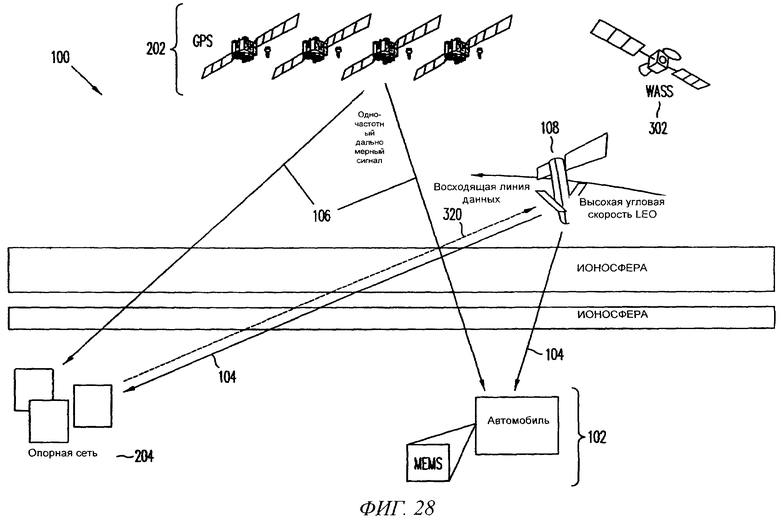

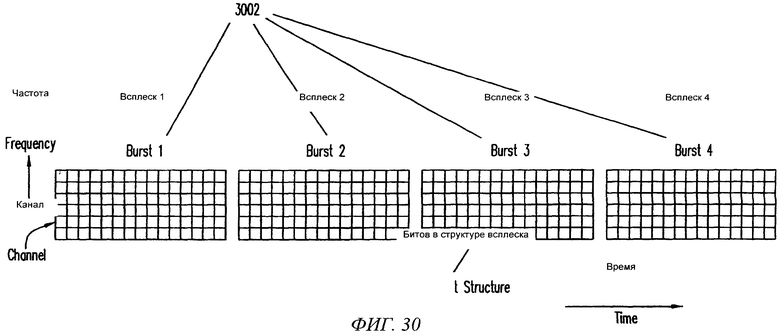
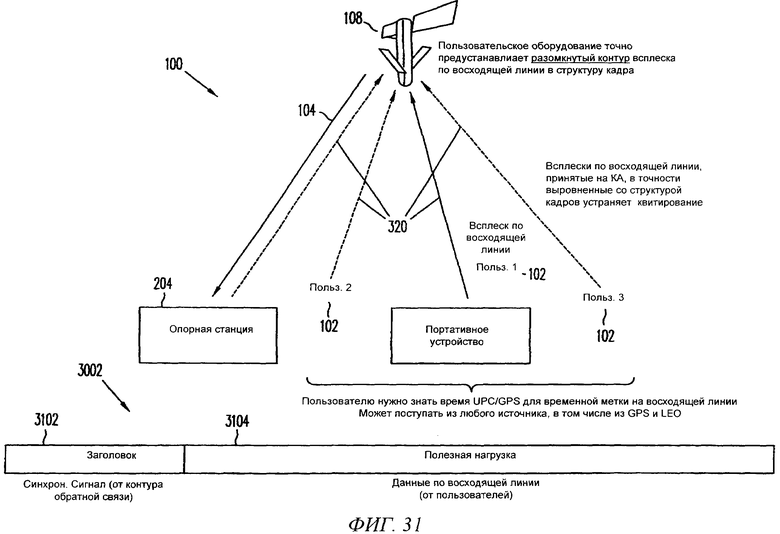
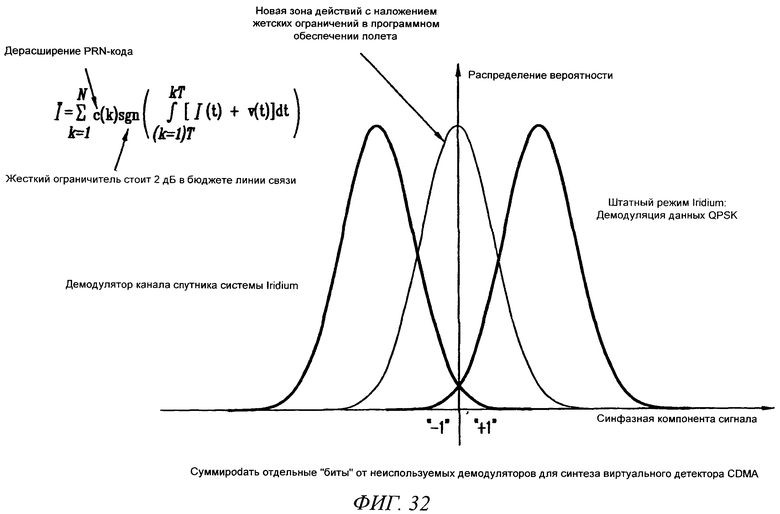
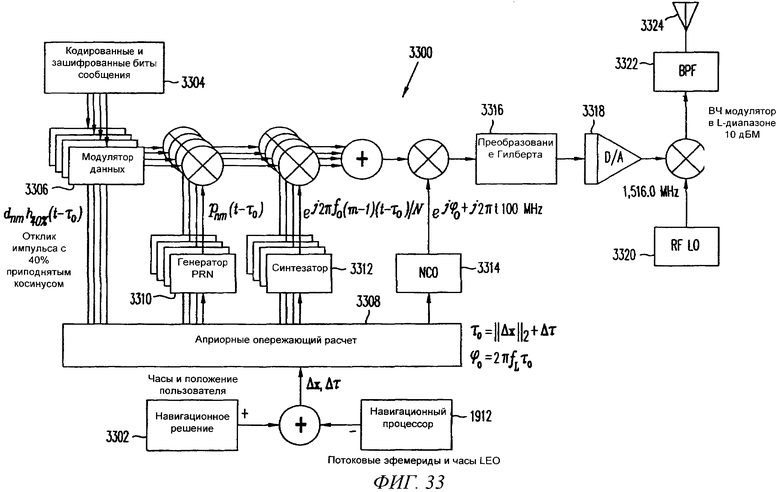
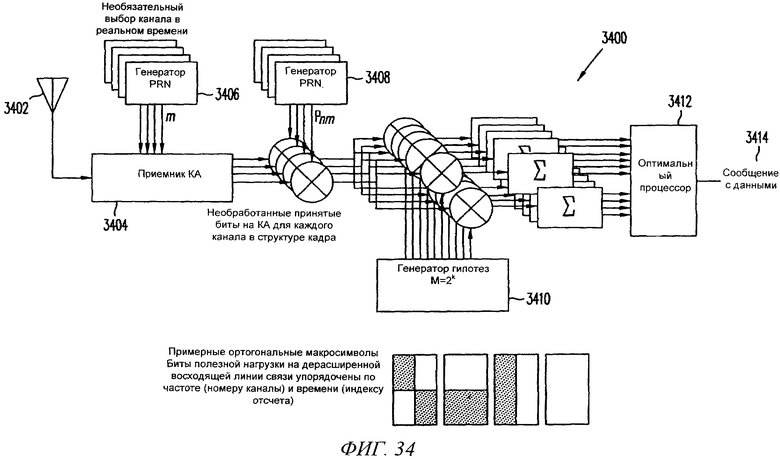
Изобретение относится к навигации, а именно к спутниковым способам навигации, и может быть использовано для определения положения объекта. Технический результат заключается в повышении эффективности и обеспечении навигации с высоким уровнем интеграции и защищенности. Для этого навигация осуществляется с помощью сигналов спутников на низкой околоземной орбите (LEO), с использованием также сигналов от двух источников дальномерных сигналов для определения калибровочной информации, связанной с ними, при этом положение вычисляется при помощи навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации. Также возможно обеспечение множества каналов передачи на множестве временных интервалов передачи с использованием псевдослучайных помех (PRN) и объединением каналов связи и навигационных каналов в сигнал LEO. Способ также включает в себя широковещательную передачу сигнала LEO от спутника LEO, представлена также восходящая линия передачи данных спутника на низкой околоземной орбите (LEO). Представлены также различные подходы к локализованной постановке преднамеренных помех для навигационных сигналов. 2 н. и 12 з.п. ф-лы, 34 ил., 4 табл.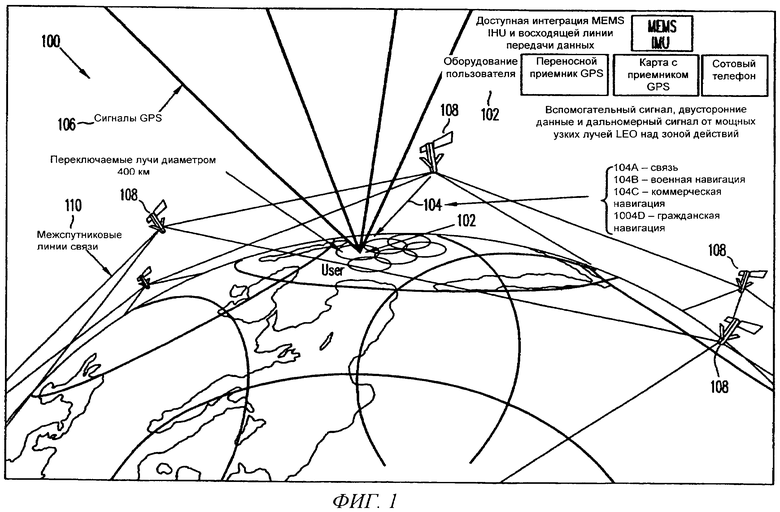
1. Способ осуществления навигации, содержащий следующие этапы:
принимают сигнал с низкой околоземной орбиты (LEO) от спутника LEO;
декодируют навигационный сигнал из сигнала LEO;
принимают первый и второй дальномерные сигналы соответственно от первого и второго источников дальномерных сигналов;
определяют калибровочную информацию, связанную с первым и вторым дальномерными источниками;
вычисляют положение с использованием навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации, и
принимают копию навигационного сигнала по сети сотовой связи; и
вычисляют положение при помощи копии навигационного сигнала, первых и вторых дальномерных сигналов и калибровочной информации.
2. Способ по п.1, отличающийся тем, что сигнал LEO содержит сигнал связи и навигационный сигнал, причем спутник LEO является спутником связи, выполненным с возможностью обеспечения сигнала LEO.
3. Способ по п.2, отличающийся тем, что спутник LEO выбран из группы, состоящей из спутника системы Iridium и спутника системы Globalstar.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что навигационный сигнал содержит сигнал псевдослучайных помех (PRN), кодированный во множестве каналов сигнала LEO.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что навигационный сигнал выбран из группы, состоящей из военного навигационного сигнала, коммерческого навигационного сигнала и гражданского навигационного сигнала.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что по меньшей мере один из дальномерных сигналов выбран из группы, состоящей из сигнала мобильного телефона, телевизионного сигнала и сигнала глобальной системы определения местоположения (GPS).
7. Способ по любому из предыдущих пунктов, отличающийся тем, что калибровочная информация содержит временную привязку кода, фазу несущей, биты данных и фазу символа.
8. Способ по любому из предыдущих пунктов, отличающийся тем, что способ осуществляется устройством, выбранным из группы, состоящей из переносного навигационного устройства, навигационного устройства на основе транспортного средства и навигационного устройства на основе летательного аппарата.
9. Способ по любому из предыдущих пунктов, отличающийся тем, что осуществление способа обусловлено наличием ключа шифрования у навигационного устройства.
10. Навигационное устройство, содержащее
средство для приема сигнала с низкой околоземной орбиты (LEO) от спутника LEO;
средство для декодирования навигационного сигнала из сигнала LEO;
средство для приема первого и второго дальномерных сигналов соответственно от первого и второго источников дальномерных сигналов;
средство для определения калибровочной информации, связанной с первым и вторым источниками дальномерных сигналов;
средство для вычисления положения при помощи навигационного сигнала, первого и второго дальномерных сигналов и калибровочной информации;
средство для приема копии навигационного сигнала по сети сотовой связи; и
средство для вычисления положения при помощи копии навигационного сигнала, первых и вторых дальномерных сигналов и калибровочной информации.
11. Навигационное устройство по п.10, дополнительно содержащее средство для оценки влияния ионосферы при помощи одночастотного сигнала L1 глобальной системы определения местоположения (GPS).
12. Навигационное устройство по п.10 или 11, дополнительно содержащее средство для обеспечения трехмерного наведения автоматической посадки для летательного аппарата при помощи навигационного сигнала и первого сигнала, причем источником первого дальномерного сигнала является спутник.
13. Навигационное устройство по любому из пп.10-12, дополнительно содержащее средство для обеспечения вертикального наведения автоматической посадки при помощи навигационного сигнала.
14. Навигационное устройство по любому из пп.10-13, дополнительно содержащее средство для осуществления автономного контроля достоверности приемника (RAIM).
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ПОМОЩЬЮ ОДНОГО СПУТНИКА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2241239C2 |
| US 6252545 B1, 26.06.2001 | |||
| WO 2005081011 A2, 01.09.2005 | |||
| Dharma P | |||
| Agrawal | |||
| GPS: Location-Tracking Technology | |||
| COMPUTER, Communications, 04.2002. | |||

