Настоящее изобретение относится к устройству и способу демодуляции в цифровой системе связи, использующей многоуровневую модуляцию, в частности к устройству и способу демодуляции, для вычисления значений мягкого решения канального декодера в демодуляторе для цифровой системы связи, использующей 16-ричную квадратурную амплитудную модуляцию (КАМ).
Предшествующий уровень техники
В цифровой системе связи, когда сигнал, кодированный в канальном кодере, модулируется с использованием 16-ричной КАМ, представляющую собой типовую многоуровневую модуляцию для повышения спектральной эффективности, демодулятор в приемнике требует применения алгоритма отображения для генерирования значений мягкого решения (или мягких значений), соответствующих выходным битам канального кодера, из двумерного сигнала, состоящего из синфазной сигнальной составляющей и квадратурной сигнальной составляющей, чтобы канальный декодер в приемнике декодировал модулированный сигнал путем декодирования мягкого решения.
Алгоритмы отображения классифицируются на процедуру простой метрики, предложенную компанией Nokia, и процедуру метрики двойного минимума, предложенную компанией Motorola. Оба алгоритма вычисляют логарифмическое отношение правдоподобия (LLP) для выходных битов и используют вычисленные LLP в качестве входного значения мягкого решения для канального декодера.
Процедура простой метрики, представляющая собой алгоритм отображения, задаваемый путем модифицирования формулы комплексного вычисления LLP, в простую приближенную формулу, имеет простую формулу вычисления LLP, но искажение LLP, вызванное использованием приближенной формулы, приводит к ухудшению рабочих характеристик. Процедура метрики двойного минимума, представляющая собой алгоритм отображения для вычисления LLP с использованием более точной приближенной формулы и использующая вычисленное LLP в качестве входного значения мягкого решения канального декодера, может до некоторой степени восполнить ухудшение рабочих характеристик, свойственное процедуре простой метрики. Однако по сравнению с процедурой простой метрики данная процедура требует большего объема вычислений, что приводит к значительному увеличению сложности аппаратных средств.
Сущность изобретения
Поэтому задачей настоящего изобретения является создание устройства и способа для упрощения получения входных значений мягкого решения канального декодера, вычисленных по процедуре метрики двойного минимума, без использования таблицы отображения или сложной обработки, требуемой для получения значения минимального расстояния для принимаемого сигнала, в демодуляторе для цифровой системы связи, использующей 16-ричную КАМ.
Для достижения указанных и других результатов предложен способ демодуляции принятого сигнала в системе передачи данных, использующей метод модуляции для разделения выходной последовательности канального кодера на 4 бита и отображения битов на конкретную одну из 16 сигнальных точек, имеющую синфазную составляющую Хk и квадратурную составляющую Yk. Способ включает этапы вычисления мягкого значения Zk третьего демодулированного символа путем вычитания расстояния 2а между двумя демодулированными символами на одной и той же оси таблицы отображения из уровня |Yk| квадратурной сигнальной составляющей Yk; установки первой переменной α на "0", если мягкое значение Zk имеет отрицательное значение, установки первой переменной α на ″ 1″ , если Zk имеет положительное значение и квадратурная составляющая Yk имеет отрицательное значение, и установки первой переменной α на "1", если Zk имеет положительное значение и квадратурная составляющая Yk имеет положительное значение; определения мягкого значения четвертого демодулированного символа путем вычисления Yk+α *Zk с использованием квадратурной составляющей Yk, мягкого значения Zk и первой переменной α ; вычисления мягкого значения Z'k первого демодулированного символа путем вычитания расстояния 2а между двумя демодулированными символами на одной и той же оси таблицы отображения из уровня |Xk| синфазной сигнальной составляющей Xk; установки второй переменной β на "0", если мягкое решение Z'k имеет отрицательное значение, установки второй переменной β на "-1", если Z'k имеет положительное значение и синфазная составляющая Xk имеет отрицательное значение, и установки второй переменной β на ″ 1", если Z'k имеет положительное значение и синфазная составляющая Xk имеет положительное значение; и определения мягкого значения второго демодулированного символа путем вычисления Xk+β *Z’k с использованием синфазной составляющей Хk, мягкого значения Z'k и второй переменной β .
Краткое описание чертежей
Вышеуказанные и другие задачи, признаки и преимущества настоящего изобретения поясняются в последующем детальном описании со ссылками на чертежи, на которых представлено следующее:
Фиг.1 - диаграмма совокупности сигналов для 16-ричной КАМ;
Фиг.2 - процедура вычисления значений мягкого решения 4 демодулированных символов, поступающих на вход канального декодера, в цифровой системе связи, использующей 16-ричную КАМ в соответствии с возможным вариантом осуществления настоящего изобретения;
Фиг.3 - функциональная блок-схема вычислителя для выполнения процедуры определения значений мягкого решения для демодулированных символов в соответствии с возможным вариантом осуществления настоящего изобретения;
Фиг.4 - демодулятор символов для определения значений мягкого решения канального декодера в цифровой системе связи, использующей 16-ричную КАМ, в соответствии с возможным вариантом осуществления настоящего изобретения.
Детальное описание предпочтительного варианта осуществления изобретения
Предпочтительный вариант осуществления настоящего изобретения описан ниже со ссылками на иллюстрирующие чертежи. В последующем описании хорошо известные функции или конструкции подробно не описываются, чтобы не загромождать сущность изобретения ненужными деталями.
Настоящее изобретение обеспечивает способ получения входного мягкого значения канального декодера с использованием процедуры метрики двойного минимума без использования таблицы отображения или сложных вычислений в демодуляторе для системы передачи данных, использующей 16-ричную КАМ.
Ниже описан алгоритм для генерирования многомерных мягких значений из двумерного принятого сигнала. Выходная последовательность двоичного канального кодера делится на m битов и отображается на соответствующие сигнальные точки из М (=2m) сигнальных точек согласно правилу кодирования кодом Грея. Это может быть представлено следующим образом:
Уравнение (1)

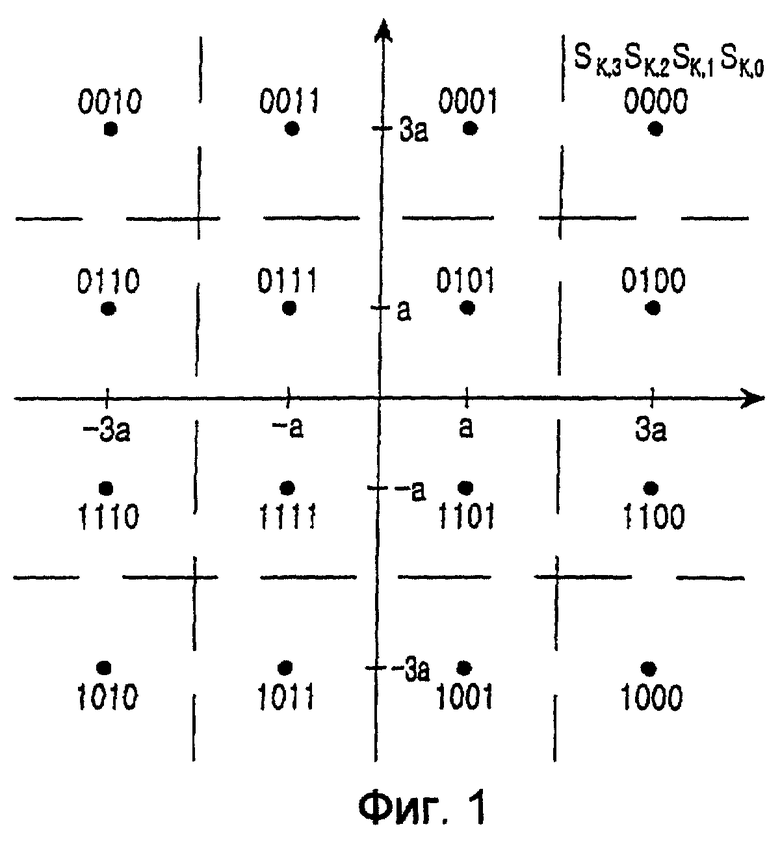
В уравнении (1) Sk,i(i=0,1,... ,m-1) обозначает i-ый бит в выходной последовательности двоичного канального кодера, отображаемой на k-ый символ, a Ik и Qk обозначают синфазную и квадратурную сигнальные составляющие k-го символа соответственно. Для 16-ричной КАМ m=4 и соответствующая совокупность сигналов представлена на фиг.1. Как показано на чертеже, совокупность сигналов содержит 16 сигнальных точек, причем каждый квадрант содержит 4 сигнальные точки.
Каждая сигнальная точка выражается 4 символами. Например, на фиг.1 первый квадрант разделен на 4 области; правая верхняя область отображается на символьный поток "0000", правая нижняя область отображается на символьный поток "0100", левая верхняя область отображается на символьный поток "0001" и левая нижняя область отображается на символьный поток "0101".
Комплексный выходной сигнал демодулятора символов в приемнике, содержащий синфазную сигнальную составляющую Ik и квадратурную сигнальную составляющую Qk, определяется следующим образом:
Уравнение (2)

В уравнении (2) Xk и Yk обозначают синфазную сигнальную составляющую и квадратурную сигнальную составляющую выходного сигнала демодулятора символов соответственно. Кроме того, gk - комплексный коэффициент, обозначающий коэффициенты передачи передатчика, среды передачи и приемника. Кроме того, η I k и η Q k - гауссовские шумы с нулевым средним значением и дивергенцией σ 2 n, причем эти шумы статистически независимы друг от друга.
Значение LLP, соответствующее последовательности sk,i (i=0,1,…,m-1), может быть вычислено с помощью уравнения (3), и вычисленное значение LLP может быть использовано в качестве значения мягкого решения, подаваемого на канальный декодер.
Уравнение (3)

В уравнении (3) Λ (sk,i) есть значение мягкого решения, К - постоянная, Pr{A|B} - условная вероятность, определенная как вероятность того, что событие А возникнет при условии, что возникает условие В. Однако поскольку уравнение (3) является нелинейным и требует относительно больших вычислений, необходим алгоритм для аппроксимации уравнения (3) для действительной реализации. В случае каналов с гауссовым шумом при gk=1 в уравнении (2), уравнение (3) может быть записано следующим образом:
Уравнение (4)


В уравнении (4) К'=(1/σ n 2) К и zk(sk,i=0) и Zk(sk,i=1) обозначают действительные значения Ik+jQk для sk,i=0 и sk,i=1 соответственно. Чтобы вычислить уравнение (4), необходимо определить zk(sk,i=0) и zk(sk,i=1) путем минимизации |Rk-zk(sk,i=0)|2 и |Rk-zk(sk,i=1)|2 для двумерного принятого сигнала R2.
Уравнение (4), аппроксимируемое посредством процедуры метрики двойного минимума, может быть переписано в следующем виде:
Уравнение (5)

В уравнении (5) nk,i указывает на значение i-го бита последовательности восстановления для сигнальной точки, ближайшей к Rk, а  указывает на отрицание для nk,i. Ближайшая сигнальная точка определяется диапазонами значения синфазной сигнальной составляющей и значения квадратурной сигнальной составляющей Rk. Первый член в скобках в уравнении (5) может быть записан следующим образом:
указывает на отрицание для nk,i. Ближайшая сигнальная точка определяется диапазонами значения синфазной сигнальной составляющей и значения квадратурной сигнальной составляющей Rk. Первый член в скобках в уравнении (5) может быть записан следующим образом:
Уравнение (6)

В уравнении (6) Uk и Vk обозначают синфазную сигнальную составляющую и квадратурную сигнальную составляющую сигнальной точки, отображенной посредством nk={nk,m-1,... ,nk,i,... ,nk,1, nk,0} соответственно.
Кроме того, второй член в скобках в уравнении (5) может быть записан в следующем виде:
Уравнение (7)

В уравнении (7) Uk,i и Vk,i обозначают синфазную сигнальную составляющую и квадратурную сигнальную составляющую сигнальной точки, отображенной посредством последовательности восстановления {mk,m-1,... ,mk,i ,... mk,1,mk,0} для zk, минимизирующего |Rk-Zk(sk,i=
,... mk,1,mk,0} для zk, минимизирующего |Rk-Zk(sk,i= )|2 соответственно. Уравнение (5) переписывается как уравнение (8) с помощью уравнений (6) и (7).
)|2 соответственно. Уравнение (5) переписывается как уравнение (8) с помощью уравнений (6) и (7).
Уравнение (8)

Ниже описан способ вычисления входных значений мягкого решения для канального декодера в демодуляторе системы связи, использующей 16-ричную КАМ. Сначала используются Таблица 1 и Таблица 2 для вычисления {nk,3, nk,2, nk,1, nk,0}, Uk, Vk из двух сигнальных составляющих Xk и Yk модулированного 16-ричной КАМ принятого сигнала Rk. Таблица 1 иллюстрирует {nk,3, nk,2) и Vk для случая, где квадратурная сигнальная составляющая Yk принятого сигнала Rk возникает в каждой из 4 областей, параллельных горизонтальной оси на фиг.1. Для удобства, в Таблице 1 опущены 3 граничные значения, т.е. результирующие значения при Yk=-2a, Yk=0 и Yk=2a. Таблица 2 иллюстрирует {nk,1, nk,0) и Uk для случая, где синфазная сигнальная составляющая Xk принятого сигнала Rk возникает в каждой из 4 областей, параллельных вертикальной оси на фиг.1. Для удобства, в Таблице 2 опущены 3 граничные значения, т.е. результирующие значения при Xk=-2a, Xk=0 и Xk=2a.
Таблица 3 иллюстрирует последовательность {mk,3, mk,2, mk,1, mk,0}, минимизирующую |Rk-zk(Sk,i= )|2, вычисленную для i (где i∈ {0,1,2,3}, в терминах функции {nk,3, nk,2, nk,1, nk,0}, а также иллюстрирует синфазную и квадратурную сигнальные составляющие Uk,i И Vk,i соответствующего zk.
)|2, вычисленную для i (где i∈ {0,1,2,3}, в терминах функции {nk,3, nk,2, nk,1, nk,0}, а также иллюстрирует синфазную и квадратурную сигнальные составляющие Uk,i И Vk,i соответствующего zk.
 , 1, nk,1, nk,0}
, 1, nk,1, nk,0} , nk,1,nk,0}
, nk,1,nk,0} , nk,0}
, nk,0} }
}
Таблица 4 и Таблица 5 иллюстрируют Vk,i и Uk,i соответствующие (mk,3, mk,2) и (mk,1,mk,0), вычисленным в Таблице 3 для всех комбинаций (nk,3,nk,2) и (nk,1, nk,0).
Таблица 6 и Таблица 7 иллюстрируют результаты, полученные путем масштабирования с понижением в отношении К'х4а для значений мягкого решения, полученных путем подстановки Vk,i и Uk,i из Таблицы 4 и Таблицы 5 в уравнение (8). Т.е. когда применяется принятый сигнал Rk, то может быть определено LLR, удовлетворяющее соответствующему условию как значение мягкого решения по Таблице 6 и Таблице 7. Если канальный декодер, использованный в системе, не является декодером логарифмической максимальной апостериорной вероятности, то должен быть добавлен процесс масштабирования с повышением LLR по Таблице 6 и Таблице 7 в реверсивном отношении к отношению масштабирования с понижением.
Однако при выдаче входного мягкого значения канального декодера с использованием Таблиц 6 и 7 отображения демодулятор, к сожалению, должен сначала выполнять операцию определения условия для принятого сигнала и требует памяти для хранения выходного содержимого согласно соответствующему условию. Такие недостатки можно преодолеть путем вычисления значений мягкого решения для канального декодера с использованием формулы, выражающей простую операцию определения условия вместо таблицы отображения.
С этой целью формулы определения условия, показанные в Таблицах 6 и 7, могут быть выражены, как показано в Таблицах 8 и 9. В Таблице 8 Zk=|Yk|-2a и в Таблице 9 Z'k=|Xk|-2a. В Таблицах 8 и 9 приняты во внимание даже мягкие значения в 3 граничных значениях, которые были опущены в Таблицах 6 и 7 для удобства.
В реализации на основе аппаратных средств Таблицы 8 и 9 могут быть упрощены в виде Таблиц 10 и 11 при условии, что Xk, Yk, Zk и Z'k могут быть выражены посредством знаковых битов. В Таблицах 10 и 11 MSB(x) обозначает наиболее значимый бит (MSB) данного значения х.
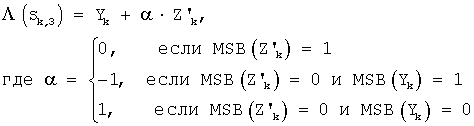
Из Таблицы 10 значения мягкого решения Λ (sk,3) и Λ (sk,2) для i=3 и i=2 выражаются следующим образом:
Уравнение (9)

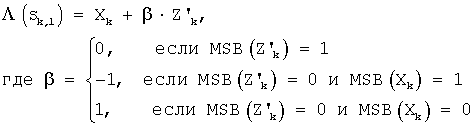
Из Таблицы 11 значения мягкого решения Λ (sk,1) и Λ (sk,0) для i=1 и 1=0 выражаются следующим образом:
Уравнение (10)

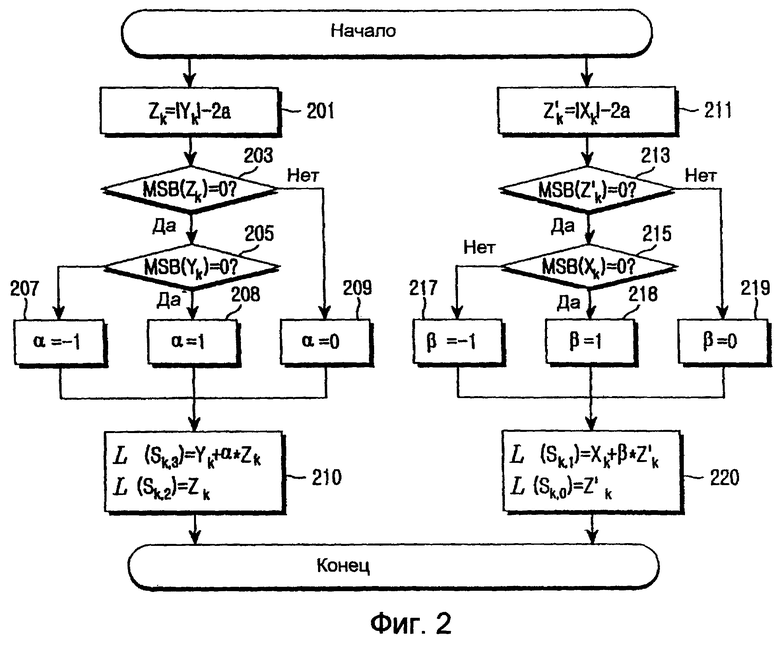
Т.е. в цифровой системе связи, использующей 16-ричную КАМ, можно действительно вычислить значения мягкого решения, которые являются выходными сигналами демодулятора для одного принятого сигнала или входными сигналами канального декодера, с использованием процедуры метрики двойного минимума по уравнению (4), путем простых вычислительных формул согласно уравнениям (9) и (10). Этот процесс иллюстрируется на фиг.2.
На фиг.2 показана процедура для вычисления значений мягкого решения в цифровой системе связи, использующей 16-ричную КАМ согласно возможному варианту осуществления настоящего изобретения. Согласно фиг.2 процесс определения мягкого решения посредством процедуры метрики двойного минимума может быть подразделен на первый этап определения α путем анализа квадратурной сигнальной составляющей и значения "а" и определения β путем анализа синфазной сигнальной составляющей и значения "а" и второй этап выдачи мягкого значения, определенного посредством значений α и β , полученных на первом этапе. Операция, описанная ниже, может быть выполнена, например, демодулятором символов приемника.
Согласно фиг.2 на этапе 201 демодулятор символов вычисляет Zk=|Yk|-2a с использованием двумерного принятого сигнала Rk, состоящего из синфазной составляющей Xk и квадратурной составляющей Yk, и расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения. Здесь Zk,Yk,Xk и "а" - действительные числа. Демодулятор символов на этапе 203 определяет, имеет ли результирующее значение, вычисленное по вышеприведенным формулам, положительное значение. Например, Zk, Yk, Xk и "а" выражаются цифровым значением, включающим знаковый бит. Поэтому на этапе 203 демодулятор символов определяет, является ли MSB (или знаковый бит) результирующего значения равным "0". Если MSB равен "0", то демодулятор символов переходит к этапу 205. В противном случае демодулятор символов переходит к этапу 209, где он устанавливает параметр α на "0". На этапе 205 демодулятор символов определяет, имеет ли квадратурная составляющая Yk положительное значение, т.е. определяет, имеет ли MSB в Yk значение "0". Если Yk имеет положительное значение, то демодулятор символов на этапе 208 устанавливает переменную α на "1". В противном случае демодулятор символов устанавливает переменную α на "-1" на этапе 207. После этого на этапе 210 демодулятор символов определяет четвертый демодулированный символ sk,3 из демодулированных символов, соответствующих принятому сигналу Rk с использованием Yk+α *Zk и определяет третий демодулированный символ sk,2 с использованием Zk, тем самым определяя входное мягкое значение для канального декодера.
До сих пор была описана процедура определения мягких значений для четвертого и третьего демодулированных символов с использованием квадратурной составляющей. Затем будет описана процедура определения мягких значений для второго и первого демодулированных символов с использованием синфазной составляющей.
На этапе 211 демодулятор символов вычисляет Z'k=|Xk|-2а с использованием двумерного принятого сигнала Rk, состоящего из синфазной составляющей Xk и квадратурной составляющей Yk, и расстояния 2 а между двумя демодулированными символами по одной и той же оси таблицы отображения. Демодулятор символов на этапе 213 определяет, имеет ли результирующее значение, вычисленное по вышеприведенным формулам, положительное значение, т.е. определяет, является ли MSB (или знаковый бит) результирующего значения равным "0". Если результирующее значение имеет положительное значение, то демодулятор символов переходит к этапу 215. В противном случае демодулятор символов переходит к этапу 219, где он устанавливает параметр β на "0". На этапе 215 демодулятор символов определяет, имеет ли синфазная составляющая Xk положительное значение, т.е. определяет, имеет ли MSB в Xk значение "0". Если Xk имеет положительное значение, то демодулятор символов на этапе 218 устанавливает переменную β на "1". В противном случае демодулятор символов устанавливает переменную β на "1" на этапе 217. После этого на этапе 220 демодулятор символов определяет второй демодулированный символ sk,1 из демодулированных символов, соответствующих принятому сигналу Rk, с использованием Xk+β *Zk и определяет первый демодулированный символ sk,o с использованием Zk, тем самым определяя входное мягкое значение для канального декодера. Процедура определения четвертого и третьего демодулированных символов и процедура определения второго и первого демодулированных символов могут выполняться либо последовательно, либо одновременно. Полученные мягкие значения демодулированных символов подаются в канальный декодер.
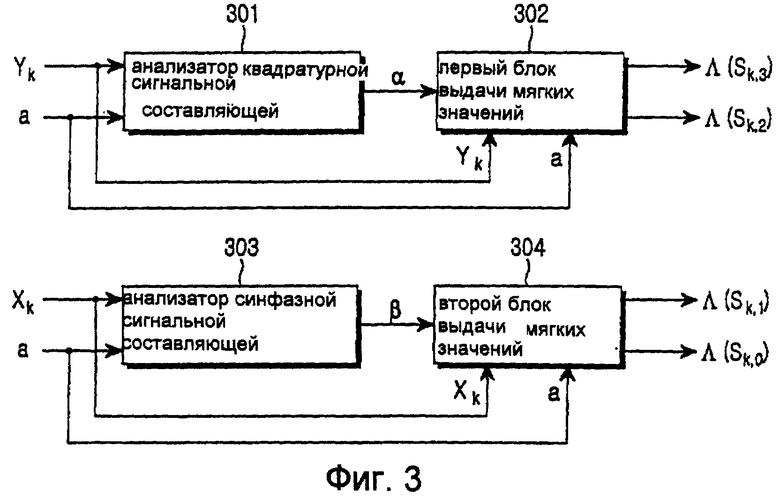
На фиг.3 показана функциональная блок-схема для выполнения процедуры определения значений мягкого решения демодулированных символов соответственно возможному варианту осуществления настоящего изобретения. Согласно фиг.3 анализатор 301 квадратурной сигнальной составляющей вычисляет переменную α с использованием квадратурной сигнальной составляющей Yk принятого сигнала Rk и расстояние 2а между двумя демодулированными символами по одной и той же оси таблицы отображения, согласно заданному правилу. Как указано выше, переменная α вычисляется на основе знака Zk(=|Yk|-2а) и знака квадратурной сигнальной составляющей Yk. Первый блок 302 выдачи мягких значений решает уравнение (9) с использованием переменной α с анализатора 301 квадратурной сигнальной составляющей, квадратурной сигнальной составляющей Yk и расстояния 2а и выдает мягкие значения четвертого и третьего демодулированных символов.
Анализатор 303 синфазной сигнальной составляющей вычисляет переменную β с использованием синфазной сигнальной составляющей Xk принятого сигнала Rk и расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения, согласно заданному правилу. Как указано выше, переменная β вычисляется на основе знака Z'k(=|Xk|-2a) и знака синфазной сигнальной составляющей Xk. Второй блок 304 выдачи мягких значений решает уравнение (10) с использованием переменной β с анализатора 303 синфазной сигнальной составляющей, синфазной сигнальной составляющей Xk и расстояния 2a и выдает мягкие значения второго и первого демодулированных символов.
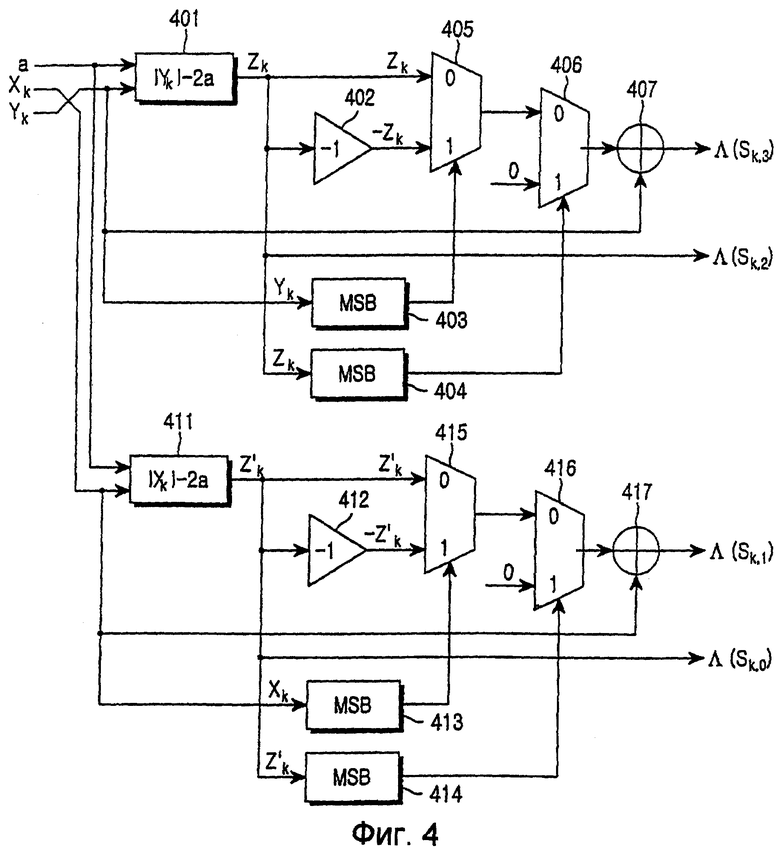
На фиг.4 показан демодулятор символов для вычисления значений мягкого решения канального декодера в системе передачи данных, использующей 16-ричную КАМ, согласно возможному варианту осуществления настоящего изобретения, причем демодулятор символов реализован аппаратными средствами на основе уравнения (9) и уравнения (10). Здесь двумерный принятый сигнал Rk, синфазная сигнальная составляющая Xk и квадратурная сигнальная составляющая Yk, переменная Zk, переменная Z'k, параметр α и параметр β - все являются действительными числами, имеющими цифровое значение, включающее знаковый бит.
В соответствии с фиг.4 первый вычислитель 401 вычисляет Zk=|Yk|-2a с использованием квадратурной сигнальной составляющей Yk принятого сигнала Rk и расстояния 2a между двумя демодулированными символами по одной и той же оси таблицы отображения и выдает значение Zk. Умножитель 402 умножает Zk с первого вычислителя 401 на "-1" для инвертирования знака Zk. Первый блок 403 выделения MSB выделяет MSB квадратурной сигнальной составляющей Yk и подает его на первый селектор 405, а второй блок 404 выделения MSB выделяет MSB Zk с первого вычислителя 401 и подает его на второй селектор 406. Первый селектор 405 принимает Zk с первого вычислителя 401 и "-Zk" с первого умножителя 402 и выбирает одно из двух входных значений соответственно сигналу выбора с первого блока 403 выделения MSB. Второй селектор 406 принимает выходной сигнал с первого селектора 405 и "0" и выбирает одно из двух входных значений соответственно сигналу выбора с второго блока 404 выделения MSB. Первый сумматор 407 суммирует выходной сигнал второго селектора 406 и квадратурную сигнальную составляющую Yk и выдает мягкое значение четвертого демодулированного символа. Кроме того, значение Zk, вычисленное первым вычислителем 401, выдается как мягкое значение третьего демодулированного символа.
Второй вычислитель 411 вычисляет Z'k=|Xk|-2a с использованием синфазной сигнальной составляющей Xk принятого сигнала Rk и расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения и выдает значение Z'k. Умножитель 412 умножает Z'k с второго вычислителя 411 на "-1" для инвертирования знака Z'k. Третий блок 413 выделения MSB выделяет MSB синфазной сигнальной составляющей Xk и подает его на третий селектор 415, а четвертый блок 414 выделения MSB выделяет MSB Z'k с второго вычислителя 411 и подает его на четвертый селектор 416. Третий селектор 415 принимает Z'k с второго вычислителя 411 и "-Z'k" с второго умножителя 412 и выбирает одно из двух входных значений соответственно сигналу выбора с третьего блока 413 выделения MSB. Четвертый селектор 416 принимает выходной сигнал с третьего селектора 415 и "0" и выбирает одно из двух входных значений соответственно сигналу выбора с четвертого блока 414 выделения MSB. Второй сумматор 417 суммирует выходной сигнал четвертого селектора 416 и синфазную сигнальную составляющую Xk и выдает мягкое значение второго демодулированного символа. Кроме того, значение Z'k, вычисленное вторым вычислителем 411, выдается как мягкое значение третьего демодулированного символа.
Ниже приведено сравнение между известной процедурой получения мягкого значения и новой процедурой получения мягкого значения в смысле достижимой эффективности.
В случае вычислителя значения мягкого решения, использующего процедуру метрики двойного минимума, реализуемую уравнением (5), такой обычный способ определения мягкого решения требует десятков операций возведения в квадрат и сравнения, в то время как новый демодулятор символов по фиг.4 содержит 4 сумматора, 2 умножителя и 4 мультиплексора, что способствует заметному сокращению времени работы и сложности вычислителя. Таблица 12 иллюстрирует сравнение между уравнением (4) и уравнениями (9)-(10) в терминах типа и числа операций для i∈ {0,1,2,3}.
В итоге настоящее изобретение выводит Таблицы 6-11 из уравнений (6)-(8) и процесс согласно Таблицам 1-5, чтобы уменьшить время задержки и сложность, что может иметь место, когда уравнение (4) известной процедуры метрики двойного минимума, или уравнение (5), полученное упрощением процедуры метрики двойного минимума, реализуются с использованием 16-ричной квадратурной амплитудной модуляции (КАМ). Кроме того, настоящее изобретение обеспечивает уравнения (9) и (10), представляющие новые формулы, используемые для реализации процедуры метрики двойного минимума в 16-ричной КАМ. Кроме того, настоящее изобретение обеспечивает устройство, реализованное аппаратными средствами на основе уравнения (9) и уравнения (10).
Как описано выше, при получении значения мягкого решения, необходимого в качестве входного для канального декодера в процедуре метрики двойного минимума, новый демодулятор для цифровой системы связи, использующей модуляцию посредством 16-ричной КАМ, обеспечивает простые и быстрые вычисления при получении того же результата, что и в случае использования известной формулы. Вычислитель мягкого значения, реализованный аппаратными средствами, в значительной мере уменьшает рабочее время и сложность демодулятора.
Хотя изобретение показано и описано со ссылками на его предпочтительный вариант осуществления, следует иметь в виду, что специалистами в данной области техники могут быть сделаны различные изменения по форме и в деталях без отклонения от сущности и объема изобретения, как представлено в формуле изобретения.
Изобретение относится к радиотехнике. Технический результат заключается в упрощении получения входных значений мягкого решения канального декодера без использования сложной обработки. Сущность изобретения заключается в том, что первый вычислитель вычисляет мягкое значение А(Sk,2) третьего демодулированного символа из 4 демодулированных символов путем вычитания расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения из уровня |Yk| квадратурной составляющей Yk. Второй вычислитель определяет мягкое значение А(Sk,3) четвертого демодулированного символа путем вычисления Yk+α*Zk с использованием первой переменной α. Третий вычислитель вычисляет мягкое значение Λ(Sk,0) первого демодулированного символа путем вычитания расстояния 2а из уровня |Xk| синфазной составляющей Xk. Четвертый вычислитель определяет мягкое значение Λ(Sk,1) второго демодулированного символа путем вычисления Xk+α*Zk с использованием второй переменной β. 5 н. и 8 з.п. ф-лы, 14 ил., 12 табл.

где Λ(Sk,0) обозначает мягкое значение первого демодулированного символа, Λ(Sk,1) обозначает мягкое значение второго демодулированного символа, MSB обозначает наиболее значимый бит или знаковый бит, |Xk| обозначает абсолютное значение синфазной составляющей Xk и 2а обозначает расстояние между двумя демодулированными символами по одной и той же оси таблицы отображения;
и второй блок определения мягких значений для определения мягких значений Λ(Sk,2) и Λ(Sk,3) третьего и четвертого демодулированных символов из 4 демодулированных символов согласно следующим уравнениям:

где Λ(Sk,2) обозначает мягкое значение третьего демодулированного символа, Λ(Sk,3) обозначает мягкое значение четвертого демодулированного символа, |Yk| обозначает абсолютное значение квадратурной составляющей Yk и 2а обозначает расстояние между двумя демодулированными символами по одной и той же оси таблицы отображения.
вычисления мягких значений Λ(Sk,0) и Λ(Sk,1) первого и второго демодулированных символов из 4 демодулированных символов согласно следующим уравнениям:
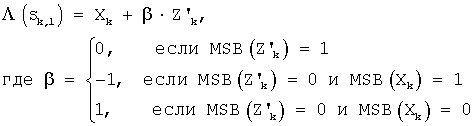

где Λ(Sk,0) обозначает мягкое значение первого демодулированного символа, Λ(Sk,1) обозначает мягкое значение второго демодулированного символа, MSB обозначает наиболее значимый бит или знаковый бит, |Xk| обозначает абсолютное значение синфазной составляющей Xk, 2a обозначает расстояние между двумя демодулированными символами по одной и той же оси таблицы отображения; и
вычисления мягких значений Λ(Sk,2) и Λ(Sk,3) третьего и четвертого демодулированных символов из 4 демодулированных символов согласно следующим уравнениям:
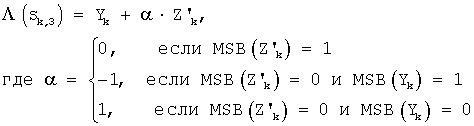

где Λ(Sk,2) обозначает мягкое значение третьего демодулированного символа, Λ(Sk,3) обозначает мягкое значение четвертого демодулированного символа, |Yk| обозначает абсолютное значение квадратурной составляющей Yk, 2a обозначает расстояние между двумя демодулированными символами по одной и той же оси таблицы отображения.
выбора в качестве первого выбранного сигнала мягкого значения Z'k первого демодулированного символа или инвертированного сигнала мягкого значения Z'k первого демодулированного символа соответственно знаковому биту синфазной составляющей Xk;
выбора в качестве второго выбранного сигнала первого выбранного сигнала или сигнала "0" соответственно знаковому биту мягкого значения Z'k первого демодулированного символа и
суммирования второго выбранного сигнала и синфазной составляющей Xk и выдачи мягкого значения второго демодулированного символа.
вычисления Zk=|Yk|-2a с использованием квадратурной составляющей Yk и расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения и выдачи Zk как мягкого значения третьего демодулированного символа;
выбора в качестве третьего выбранного сигнала мягкого значения Zk третьего демодулированного символа или инвертированного сигнала мягкого значения Zk первого демодулированного символа соответственно знаковому биту квадратурной составляющей Yk;
выбора в качестве четвертого выбранного сигнала третьего выбранного сигнала или сигнала "0" соответственно знаковому биту Zk и
суммирования четвертого выбранного сигнала и квадратурной составляющей Yk и выдачи мягкого значения четвертого демодулированного символа.
(a) вычисления мягкого значения Λ(Sk,2) третьего демодулированного символа из 4 демодулированных символов путем вычитания расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения из абсолютного значения |Yk| квадратурной составляющей Yk,
(b) определения мягкого значения Λ(Sk,3) четвертого демодулированного символа путем вычисления Yk+α·Zk с использованием первой переменной α, определенной мягким значением третьего демодулированного символа и знаковым битом квадратурной составляющей Yk, где Zk - мягкое значение третьего демодулированного символа;
(c) вычисления мягкого значения A(Sk,0) первого демодулированного символа путем вычитания расстояния 2а из абсолютного значения |Xk| синфазной составляющей Xk и
(d) определения мягкого значения Λ(Sk,1) второго демодулированного символа путем вычисления Xk+β·Z'k с использованием второй переменной β, определенной мягким значением первого демодулированного символа и знаковым битом синфазной составляющей Xk, где Z'k - мягкое значение первого демодулированного символа.
установки второй переменной β на "1", если Z'k имеет положительное значение и синфазная составляющая Xk имеет положительное значение.
вычисления мягкого значения Zk третьего демодулированного символа путем вычитания расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения из уровня |Yk| квадратурной сигнальной составляющей Yk;
установки первой переменной α на "0", если мягкое значение Zk имеет отрицательное значение, установки первой переменной α на “-1”, если Zk имеет положительное значение и квадратурная составляющая Yk имеет отрицательное значение, и установки первой переменной α на "1", если Zk имеет положительное значение и квадратурная составляющая Yk имеет положительное значение;
определения мягкого значения четвертого демодулированного символа путем вычисления Yk+α·Zk с использованием квадратурной составляющей Yk, мягкого значения Zk и первой переменной α;
вычисления мягкого значения Z'k первого демодулированного символа путем вычитания расстояния 2а между двумя демодулированными символами по одной и той же оси таблицы отображения из абсолютного значения |Xk| синфазной сигнальной составляющей Xk;
установки второй переменной β на "0", если мягкое решение Z'k имеет отрицательное значение, установки второй переменной β на "-1", если Z'k имеет положительное значение и синфазная составляющая Xk имеет отрицательное значение, и установки второй переменной β на "1", если Z'k имеет положительное значение и синфазная составляющая Xk имеет положительное значение; и
определения мягкого значения второго демодулированного символа путем вычисления Xk+β·Z'k с использованием синфазной составляющей Xk, мягкого значения Z'k и второй переменной β.
| US 6044112, 28.03.2000 | |||
| ДЕМОДУЛЯТОР СИГНАЛОВ ЧЕТЫРЕХПОЗИЦИОННОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2019050C1 |
| JP 11068876 А, 09.03.1999 | |||
| ЕР 0957614, 17.11.1999 | |||
| Способ кузнечной вытяжки | 1978 |
|
SU841756A1 |

