Предлагаемое изобретение относится к области трубопроводного транспорта, в частности к транспортированию по трубопроводам нефти и продуктов ее переработки.
Известен способ обнаружения прохождения очистного устройства по трубопроводу, реализованный в сигнализаторе прохождения очистного устройства по трубопроводу (А.с. СССР №1285261, кл. F 17 D 5/00, 1987, БИ №3), включающий формирование сигнала при прохождении очистным устройством контрольной точки, фильтрование и усиление сигнала, сравнение полученного сигнала с пороговым значением и выдачу сообщения о прохождении очистным устройством контрольной точки, если сигнал превосходит пороговое значение, при этом формирование сигнала при прохождении очистным устройством через контрольную точку осуществляется при пересечении постоянным магнитом, установленным на очистном устройстве, электрического поля первичного преобразователя.
Данный способ обнаружения прохождения очистного устройства по трубопроводу так же, как и заявляемый способ обнаружения очистных устройств, перемещающихся в трубопроводе, включает формирование сигнала при прохождении очистным устройством контрольной точки, фильтрование и усиление полученного сигнала. Однако формирование сигнала при прохождении очистным устройством контрольной точки путем изменения электрического поля первичного преобразователя (индуктивной катушки) постоянным магнитом, не обеспечивает надежного обнаружения очистного устройства.
Известен способ контроля прохождения очистных объектов в трубопроводах, реализованный в устройстве контроля прохождения очистных объектов в трубопроводах (А.с. СССР №1629684, кл. F 17 D 5/00, 1991, БИ №7), включающий прием акустического сигнала, возникающего в трубопроводе при движении очистного объекта, преобразование акустического сигнала в электрический сигнал, усиление, фильтрацию и детектирование электрического сигнала и определение среднего значения продетектированного сигнала, которое соответствует среднему значению акустического сигнала, сравнение среднего значения электрического сигнала с опорным значением и выдачу сообщения о прохождении очистного устройства, если среднее значение электрического сигнала превосходит опорное значение.
Данный способ контроля прохождения очистных объектов в трубопроводах так же, как и заявляемый способ обнаружения очистных устройств, перемещающихся в трубопроводе, включает прием акустического сигнала, преобразование акустического сигнала в электрический сигнал, усиление и фильтрацию. Однако отсутствие излучения зондирующего акустического сигнала в контролируемое сечение трубопровода резко увеличивает вероятность ошибочных срабатываний при использовании известного способа из-за сторонних ультразвуковых шумов, которые вызваны, например, завихрениями потока жидкости на деталях заслонок или работой насосных агрегатов перекачивающих станций, и которые (шумы) распространяются на значительные расстояния по металлическим стенкам трубопроводов
Известен способ контроля прохождения очистного объекта в трубопроводе, реализованный в устройстве для контроля прохождения очистного объекта в трубопроводе (Патент РФ №2030678, кл. F 17 D 5/00, 1995, БИ №7), включающий прием акустического сигнала, возникающего в трубопроводе при движении очистного объекта, преобразование акустического сигнала в электрический сигнал, усиление, фильтрацию и резонансное преобразование полученного электрического сигнала, дополнительное усиление и сравнение с опорным напряжением, по результатам которого принимается решение о прохождении очистным объектом контрольной точки.
Данный способ контроля прохождения очистного объекта в трубопроводах так же, как и заявляемый способ обнаружения очистных устройств, перемещающихся в трубопроводе, включает прием акустического сигнала, преобразование акустического сигнала в электрический сигнал, усиление, фильтрацию. Однако отсутствие излучения зондирующего акустического сигнала в контролируемое сечение трубопровода резко увеличивает вероятность ошибочных срабатываний при использовании известного способа из-за сторонних ультразвуковых шумов, которые вызваны, например, завихрениями потока жидкости на деталях заслонок или работой насосных агрегатов перекачивающих станций, и которые (шумы) распространяются на значительные расстояния по металлическим стенкам трубопроводов.
Наиболее близким по технической сущности является способ обнаружения очистных устройств, перемещающихся в нефтепроводе (декларационный патент Украины №50141 А, кл. F 17 D 5/00, 2002, БИ №10), который включает периодическое излучение зондирующего импульсного акустического сигнала в контролируемое сечение трубопровода, прием отраженного акустического сигнала из контролируемого сечения трубопровода, преобразование отраженного акустического сигнала в электрический сигнал, фильтрацию электрического сигнала в полосе частот зондирующего сигнала, стробирование электрического сигнала для выделения составляющих, которые пришли в заданном диапазоне времени после излучения зондирующего сигнала, усиление электрического сигнала, измерение его уровня и формирование контрольного напряжения, пропорционального скорости нарастания уровня сигнала, сравнение контрольного напряжения с напряжением - порогом и принятие решения о наличии очистного устройства, если контрольное напряжение превышает пороговое на протяжении заданного интервала времени.
Данный способ обнаружения очистных устройств, перемещающихся в трубопроводе, так же, как и заявляемый способ обнаружения очистных устройств, перемещающихся в трубопроводе, включает излучение зондирующего акустического импульсного сигнала в контролируемое сечение трубопровода, прием отраженного акустического сигнала из контролируемого сечения трубопровода, преобразование отраженного акустического сигнала в электрический сигнал, фильтрацию электрического сигнала в полосе частот зондирующего сигнала, стробирование сигнала для выделения полезного сигнала - составляющих зондирующего сигнала, которые пришли в заданном диапазоне времени после излучения зондирующего сигнала, усиление полезного сигнала и измерение его амплитуды. Однако отсутствие запоминания величины амплитуд ″N″ последних полезных сигналов, анализа этих сигналов и выдачи сообщения об обнаружении очистного устройства, если амплитуда полезных сигналов в ″N″ последних полезных сигналах сначала была ниже второго порогового уровня, а потом, монотонно увеличиваясь в течение установленного интервала времени, стала выше первого порогового уровня, резко снижает надежность обнаружения очистного устройства, так как при прохождении через контролируемое сечение трубопровода ″парафиновой пробки″ отдельные куски парафина и отдельные плотные скопления частиц парафина могут быть идентифицированы как очистное устройство, а реальное местонахождение очистного устройства будет неизвестно.
В основу предлагаемого изобретения поставлена задача повышения надежности обнаружения очистных устройств, перемещающихся в трубопроводе, за счет выявления очистного устройства по двум признакам полезных сигналов - по монотонному нарастанию амплитуд в последовательности полезных сигналов и по скорости их нарастания.
Поставленная задача решается тем, что в известном способе обнаружения очистных устройств, перемещающихся в трубопроводе, включающем периодическое излучение зондирующего акустического импульсного сигнала в контролируемое сечение трубопровода, прием отраженных акустических сигналов из контролируемого сечения трубопровода, преобразование принятых акустических сигналов в электрические сигналы, которые стробируют и фильтруют для выделения полезного сигнала, который пришел в заданном диапазоне времени после излучения зондирующего сигнала, усиление полезного сигнала и измерение его амплитуды, согласно изобретению запоминают величины амплитуд ″N″ последних полезных сигналов, которые анализируют и выдают сигнал об обнаружении очистного устройства, если величина амплитуды полезных сигналов в ″N″ последних полезных сигналах сначала была ниже второго порогового уровня, а потом, монотонно увеличиваясь в течение установленного интервала времени, стала выше первого порогового уровня.
Введение в способ обнаружения очистных устройств, перемещающихся в трубопроводе, операций запоминания величины амплитуд ″N″ последних полезных сигналов, анализа амплитуд этих сигналов, и выдачи сигнала об обнаружении очистного устройства, если амплитуда полезных сигналов в ″N″ последних полезных сигналах была сначала ниже второго порогового уровня, а потом, монотонно увеличиваясь в течение установленного интервала времени, стала выше первого порогового уровня, позволяет более точно и надежно идентифицировать очистное устройство и исключить ложные обнаружения очистного устройства, особенно при прохождении ″парафиновой пробки″, так как выявление очистного устройства производится по двум признакам полезных сигналов - по монотонному нарастанию амплитуд в последовательности полезных сигналов и по скорости их нарастания.
На фиг.1 для пояснения способа приведена структурная схема сигнализатора, реализующего предложенный способ;
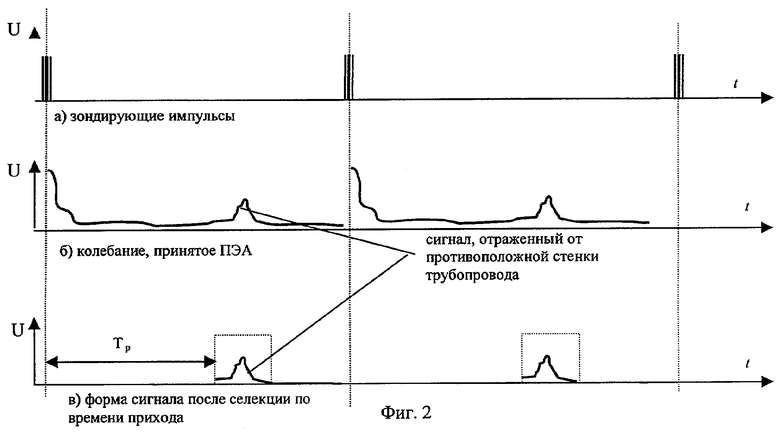
на фиг.2 приведены эпюры, поясняющие работу сигнализатора;
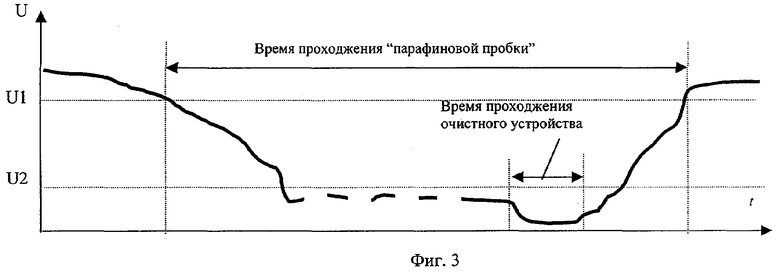
на фиг.3 показано, как изменяется уровень огибающей сигнала на выходе приемника сигнализатора во время прохождения "парафиновой пробки" и очистного устройства.
Сигнализатор (фиг.1), реализующий предлагаемый способ, содержит приемопередающий преобразователь электроакустический (ПЭА) 1, который устанавливают на трубопровод, блок обработки сигналов 2, первый вход-выход которого соединен с ПЭА 1, микроЭВМ 3, четвертый, пятый и шестой выходы которой подключены соответственно ко второму, третьему и четвертому входам блока обработки сигналов 2, блок контроля и наладки 4, электронные часы 5 и исполнительное устройство 6, выходы блока обработки сигналов 2 соединены с входами микроЭВМ 3, первые, вторые и третьи входы-выходы которой подключены к входам-выходам соответственно блока контроля и наладки 4, электронных часов 5 и исполнительного устройства 6, а также информационную шину 7, которая соединена с выходами исполнительного устройства 6. Блок обработки сигналов 2 состоит из входного устройства 8, к первому входу-выходу и второму входу которого подключены соответственно первый вход-выход и второй вход блока обработки сигналов 2, приемника 9, первый вход которого соединен с выходом входного устройства 8, аналого-цифрового преобразователя (АЦП) 10, выходы которого подключены к выходам блока обработки сигналов 2, четвертый вход которого соединен со вторыми входами приемника 9, выход которого соединен с входом АЦП 10, передатчика 11, к входу которого подключен третий вход блока обработки сигналов 2, выход передатчика 11 подключен к третьему входу входного устройства 8.
ПЭА 1 установлен на трубопроводе так, что его геометрическая ось перпендикулярна к геометрической оси трубопровода. Поперечное сечение трубопровода по оси ПЭА 1 является контролируемым сечением, так как в него излучаются зондирующие акустические сигналы и из него принимаются акустические сигналы, отраженные от противоположной внутренней стенки трубопровода.
МикроЭВМ 3 предназначена для управления процессом зондирования контролируемого сечения трубопровода и обнаружения факта прохождения очистного устройства по результатам обработки отраженных сигналов.
Блок контроля и наладки 4 предназначен для ввода в сигнализатор констант, например, времени зондирования, значений первого и второго пороговых уровней амплитуды полезного сигнала и тому подобных, подачи на микроЭВМ 3 команд при наладке и проверке сигнализатора, а также для вывода информации из устройств сигнализатора для визуального контроля при наладке.
Электронные часы 5 предназначены для выдачи значения текущего времени при фиксации в памяти микроЭВМ 3 момента обнаружения очистного устройства в контролируемом сечении трубопровода.
Исполнительное устройство 6 и информационная шина 7 предназначены для выдачи информации на верхний уровень управления нефтепроводом, например, с помощью телемеханики.
Входное устройство 8 блока обработки сигналов 2 представляет собой коммутатор, который подключает к ПЭА 1 или приемник 9, или передатчик 11 по сигналу, выдаваемому микроЭВМ 3 на второй вход блока обработки сигналов 2.
Приемник 9 блока обработки сигналов 2 выполняет фильтрацию электрических сигналов, поступивших от ПЭА 1, в полосе частот, в которой работает ПЭА 1, и усиление этих сигналов. Коэффициент усиления приемника 9 регулирует микроЭВМ 3, которая при необходимости выдает соответствующий код на четвертый вход блока обработки сигналов 2.
Передатчик 11 по сигналу, выдаваемому микроЭВМ 3 на третий вход блока обработки сигналов 2, формирует сигнал для возбуждения ПЭА 1 и, соответственно, формирования акустического зондирующего сигнала.
На фиг.2 показано время зондирования Тр - распространения излученного акустического сигнала от ПЭА 1 до противоположной внутренней стенки трубопровода и обратно (до ПЭА 1).
В процессе эксплуатации трубопровода на внутренней поверхности его стенок наслаивается парафин. Как следствие, увеличивается гидравлическое сопротивление и ухудшается ряд других технико-экономических параметров транспорта нефти. Наиболее рациональным и наиболее часто используемым способом удаления парафина с внутренней поверхности трубопровода является очистка с помощью специального очистного устройства, представляющего собой металлический "ерш" и перемещающегося в трубопроводе под давлением потока транспортируемой жидкости, в частности потока нефти. При движении по трубопроводу очистного устройства существует опасность его застревания, особенно при прохождении поворотов трубопровода, разветвлений либо запорной арматуры (вентилей, заслонок и тому подобного), а также в результате неисправности самих очистных устройств, что приводит к закупорке трубопровода. Локализация места аварии, поиск застрявшего очистного устройства и работы по его удалению из трубопровода требуют больших затрат. Для сужения диапазона поиска признано целесообразным оснащать трубопровод через каждые 20-30 км сигнализаторами, задачей которых является регистрация факта прохождения очистного устройства через контролируемое конкретным сигнализатором сечение трубопровода и передача этой информации на диспетчерский пункт, например, с помощью устройств телемеханики.
Очистное устройство, которое перемещается в трубопроводе, сдирает парафин со стенок и измельчает его, при этом в потоке нефти образуется облако частиц парафина различного размера, в том числе и кусков, которое сносится потоком нефти в виде так называемой "парафиновой пробки" длиной до нескольких километров. Начало "пробки" опережает очистное устройство, которое движется в конце "пробки". За очистным устройством также имеется облако частиц парафина, однако это облако состоит из мелких частиц и имеет длину один-два метра.
Процесс обнаружения очистного устройства заключается в периодическом зондировании контролируемого сечения трубопровода - излучении в него акустических сигналов и приеме акустических сигналов, отраженных от противоположной стенки трубопровода. При отсутствии в контролируемом сечении очистного устройства или опережающей его ″парафиновой пробки″, величина амплитуды полезного сигнала превышает установленный первый пороговый уровень - U1. При появлении ″парафиновой пробки″ в контролируемом сечении, величина амплитуды полезного сигнала уменьшается ниже первого порогового уровня, а в тех случаях, когда проходят куски парафина, величина амплитуды полезного сигнала может кратковременно стать ниже установленного второго порогового уровня - U2. При появлении в контролируемом сечении очистного устройства величина амплитуды полезного сигнала также становится ниже второго порогового уровня. Выявление очистного устройства основано на том, что при наличии в контролируемом сечении ″парафиновой пробки″ величина амплитуды полезного сигнала меньше первого порогового уровня, но больше второго порогового уровня. При прохождении ″парафиновой пробки″ величина амплитуды полезного сигнала если и достигает первого порогового уровня, то только в отдельные моменты времени. При прохождении очистного устройства через контролируемое сечение величина амплитуды полезного сигнала становится меньше второго порогового уровня, а потом монотонно возрастает в течение 3-5 секунд и превышает первый поровый уровень. Далее величина амплитуды полезного сигнала сохраняется до появления в контролируемом сечении других предметов, например оторвавшегося куска парафина.
Способ обнаружения очистных устройств, перемещающихся в трубопроводе, реализуется следующим образом.
Предварительно, в зависимости от геометрических размеров трубопровода и диапазона значений плотности транспортируемой жидкости, например нефти, определяется и устанавливается частота повторения зондирующих импульсов (из диапазона 50-500 Гц) и их длительность, равная, например, 0,5-2 микросекунды. Кроме того, при настройке сигнализатора, реализующего способ, рассчитывается или определяется экспериментально диапазон значений времени зондирования-распространения излученного акустического сигнала от ПЭА 1 до противоположной внутренней стенки трубопровода и обратно до ПЭА 1, во всем диапазоне значений плотности транспортируемой жидкости. Эти данные используются при селекции принятых ПЭА 1 сигналов путем стробирования.
Для обнаружения очистного устройства, перемещающегося в трубопроводе, в контролируемое сечение трубопровода периодически с установленной частотой излучают зондирующие акустические сигналы установленной длительности. Для этого микроЭВМ 3, в соответствующие моменты времени, сигналом со своего четвертого выхода устанавливает входное устройство 8 блока обработки сигналов 2 в передающее положение, после чего выдает на свой пятый выход и далее на третий вход блока обработки сигналов 2 сигнал соответствующей длительности. Кроме того, микроЭВМ 3 с момента выдачи сигнала на свой пятый выход начинает отсчет времени зондирования. Передатчик 11 блока 2 по поступившему от микроЭВМ 3 сигналу формирует и выдает электрический сигнал возбуждения на ПЭА 1, который излучает в контролируемое сечение трубопровода зондирующий акустический сигнал с установленными параметрами. Каждый зондирующий сигнал вызывает появление акустических отраженных сигналов, которые маскируют полезный сигнал и которые принимаются ПЭА 1. После окончания выдачи акустического зондирующего сигнала микроЭВМ 3 снимает сигнал со своего четвертого выхода и входное устройство 8 блока обработки сигналов 2 размыкает цепи для передачи и для приема сигналов от ПЭА 1. Поэтому сигналы, поступающие на ПЭА 1 в это время, не проходят на вход приемника 9 блока 2, то есть выполняется стробирование - селекция принимаемых сигналов по времени поступления. По истечении минимального времени из диапазона времен зондирования, микроЭВМ 3 выдает на свой четвертый выход сигнал, который, поступая на входное устройство 8, переключает его на пропуск сигналов с ПЭА 1 на вход приемника 9, который фильтрует сигналы по частоте и усиливает отфильтрованные сигналы - формирует полезный сигнал. С выхода приемника 9 полезный сигнал поступает на вход АЦП 10. АЦП 10 измеряет величину амплитуды полезного сигнала - преобразует величину амплитуды в цифровой код, считываемый микроЭВМ 3, которая запоминает величины амплитуд последних ″N″ сигналов. Кроме того, микроЭВМ 3 сравнивает величину амплитуды полезного сигнала с первым и вторым пороговыми уровнями. В случае отсутствия в контролируемом сечении трубопровода очистного устройства и предшествующей ему ″парафиновой пробки″ амплитуда сигнала будет больше первого порогового уровня и, в этом случае, сравнение со вторым пороговым уровнем не производится.
Во время очистки трубопровода через контролируемое сечение трубопровода, как указывалось выше, сначала проходит "парафиновая пробка", которая опережает очистное устройство и маскирует его местонахождение. При появлении в контролируемом сечении ″парафиновой пробки″ происходит ослабление отраженного акустического сигнала и, при этом, величина амплитуды полезного сигнала, формируемого блоком 2, становится меньше первого порогового уровня, а в некоторых случаях (например, когда проходит кусок парафина, полностью перекрывающий путь зондирующему сигналу) становится меньше и второго порогового уровня. МикроЭВМ 3 определяет и запоминает в своей памяти факт уменьшения амплитуды полезного сигнала ниже первого или второго пороговых уровней. Процесс прохождения ″парафиновой пробки″ длится от нескольких минут до нескольких десятков минут. Уровень отраженного акустического сигнала достигает минимума в момент прохождения очистного устройства через контролируемое сечение, но затем, после выхода очистного устройства из контролируемого сечения, отраженный акустический сигнал начинает монотонно возрастать, соответственно монотонно возрастает и амплитуда полезного сигнала, величина которой через 3-5 секунд превысит первый пороговый уровень. Изменение уровня амплитуды полезного сигнала фиксируется в памяти микроЭВМ 3 и анализируется после приема и обработки каждого отраженного сигнала. При выявлении последовательности амплитуд полезного сигнала, величина которых возрастает монотонно от уровня, который меньше второго порогового уровня, до уровня превышающего первый пороговый уровень, микроЭВМ 3 определяет время, в течении которого происходило возрастание, и, если оно находится в заданных пределах, то фиксирует факт обнаружения очистного устройства, а также момент времени, когда произошло обнаружение, по показанию электронных часов 5. Одновременно микроЭВМ 3 выдает в исполнительное устройство 6 команду на передачу на верхний уровень информации о прохождении очистного устройства через контролируемое сечение трубопровода, например, с помощью телемеханики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОЧИСТНЫХ УСТРОЙСТВ, ПЕРЕМЕЩАЮЩИХСЯ В ТРУБОПРОВОДЕ, И ГРАНИЦ РАЗДЕЛА НЕФТЕПРОДУКТОВ | 2004 |
|
RU2267695C1 |
| Импульсно-акустический способ определения местоположения внутритрубного очистного снаряда в магистральном трубопроводе | 2018 |
|
RU2691779C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СКВОЗНЫХ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 1991 |
|
RU2020467C1 |
| НЕЛИНЕЙНЫЙ МОДУЛЯЦИОННЫЙ СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2799241C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА | 2015 |
|
RU2606719C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ В КОНТРОЛИРУЕМОЕ ПРОСТРАНСТВО С ОХРАНЯЕМЫМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116672C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2008 |
|
RU2362159C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МЕЖТРУБНОГО ПРОСТРАНСТВА НЕФТЯНЫХ ДОБЫВАЮЩИХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2199005C1 |
| Способ зеркально-теневого ультразвукового контроля с адаптивным пороговым уровнем | 2022 |
|
RU2787948C1 |
Изобретение относится к способу контроля трубопровода, в частности обнаружения очистных устройств, перемещающихся в трубопроводе, в частности, при транспортировании по трубопроводам нефти и продуктов ее переработки. Способ обнаружения очистных устройств, перемещающихся в трубопроводе, включающий периодическое излучение зондирующего акустического импульсного сигнала в контролируемое сечение трубопровода, прием отраженных акустических сигналов из контролируемого сечения трубопровода, преобразование принятых акустических сигналов в электрические сигналы, которые стробируют и фильтруют для выделения полезного сигнала, который пришел в заданном диапазоне времени после излучения зондирующего сигнала, усиление полезного сигнала и измерение его амплитуды, запоминание величины амплитуд «N» последних полезных сигналов, которые анализируют, и выдачу сигнала об обнаружении очистного устройства, если величина амплитуды в «N» полезных сигналах была сначала ниже второго порогового уровня, а потом, монотонно увеличиваясь в течение установленного интервала времени, стала выше первого порогового уровня. Заявляемый способ позволяет повысить надежность обнаружения очистных устройств, перемещающихся в трубопроводе, за счет выявления очистного устройства по двум признакам - по монотонному нарастанию амплитуд в последовательности полезных сигналов и по скорости их нарастания. 3 ил.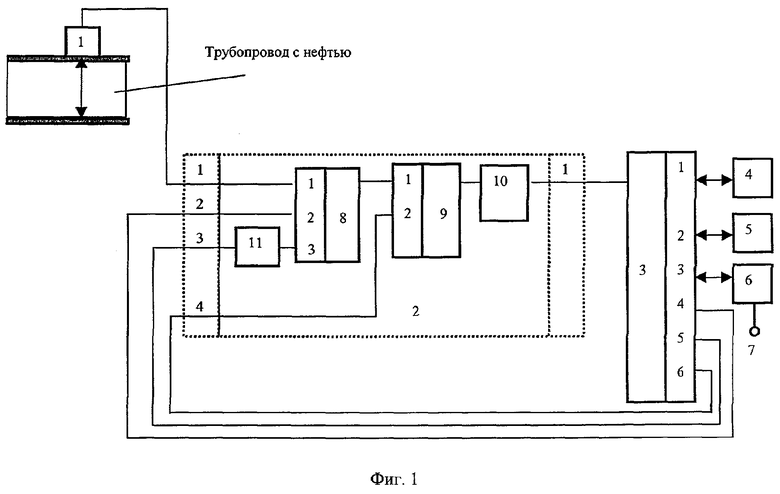
Способ обнаружения очистных устройств, перемещающихся в трубопроводе, включающий периодическое излучение зондирующего акустического импульсного сигнала в контролируемое сечение трубопровода, прием отраженных акустических сигналов из контролируемого сечения трубопровода, преобразование принятых акустических сигналов в электрические сигналы, которые стробируют и фильтруют для выделения полезного сигнала, который пришел в заданном диапазоне времени после излучения зондирующего сигнала, усиление полезного сигнала и измерение его амплитуды, отличающийся тем, что запоминают величины амплитуд «N» последних полезных сигналов, которые анализируют, и выдают сигнал об обнаружении очистного устройства, если величина амплитуды полезных сигналов в «N» последних полезных сигналах сначала была ниже второго порогового уровня, а потом, монотонно увеличиваясь в течение установленного интервала времени, стала выше первого порогового уровня.
| Диффузор | 1936 |
|
SU50141A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОХОЖДЕНИЯ ОЧИСТНОГО ОБЪЕКТА В ТРУБОПРОВОДЕ | 1992 |
|
RU2030678C1 |
| Устройство контроля прохождения очистных объектов в трубопроводах | 1989 |
|
SU1629684A1 |
| Сигнализатор прохождения очистного устройства по трубопроводу | 1985 |
|
SU1285261A1 |
| Двухтактный усилитель | 1985 |
|
SU1327274A1 |

