Изобретение относится к военной технике и может быть использовано в зенитных ракетных комплексах.
Известен зенитный ракетно-пушечный комплекс [1], содержащий вращающуюся башню с двумя автоматическими пушками, размещенными на качающейся части башни и снабженными следящим приводом; рядом с пушками, симметрично, с внешней стороны башни расположены соосно с качающейся частью блоки направляющих для установки контейнеров с зенитными ракетами, шарнирно закрепленные на кронштейне, установленном на башне; в задней части блока направляющих выполнены жесткий упор и подпружиненный фиксатор, взаимодействующие со стопором механизма сцепки, жестко закрепленным на качающейся части башни, каждый блок направляющих имеет стопорное устройство в виде подпружиненного стержня, взаимодействующего с упором башни.
Принцип работы данной системы заключается в следующем.
В режиме работы зенитными пушками следящий привод обеспечивает наведение пушек в вертикальной плоскости, блоки направляющих с расположенными на них контейнерами находятся в походном положении и зафиксированы относительно башни с помощью соответствующих стопорных устройств. Для перехода в режим работы ракетами следящий привод отрабатывает отрицательный угол возвышения пушек для совмещения с блоками направляющих. Затем срабатывает механизм сцепки, и при движении привода вверх происходит захват соответствующего блока направляющих. Наведение ракет на цель производится совместно с пушками.
Однако перевод системы из режима работы зенитными пушками в режим зенитных ракет требует определенных временных затрат, лимитируемых длительностью переброса пушек на отрицательный угол возвышения, временем срабатывания механизма сцепки и временем установки заданного угла возвышения, что снижает эффективность поражения целей.
Прототипом предлагаемого изобретения выбрано боевое отделение [2], содержащее башню, оборудованную с возможностью вертикального наведения автоматической пушкой, с внешней стороны башни по левому и правому бортам шарнирно закрепленные направляющие с противотанковыми реактивными снарядами, размещенными в контейнерах, направляющие кинематически связаны с приводами, закрепленными снаружи на боковых стенках башни, при этом автоматическая пушка и направляющие кинематически связаны каждый со своим датчиком положения.
Данная система работает следующим образом.
В режиме работы пушками привод пушек по поступающим на его вход сигналам производит наведение пушек в вертикальной плоскости, приводы направляющих отрабатывают сигналы по стабилизации положения линии прицеливания. С помощью датчиков положения пушек и направляющих замыкается отрицательная обратная связь соответствующих позиционных приводов. При переходе в режим работы ракетами приводы направляющих отрабатывают ступенчатый сигнал по наведению ракеты на цель, привод пушек осуществляет стабилизацию линии выстрела.
Данная система имеет минимальное время переключения из режима работы пушками в режим работы ракетами и обратно, определяемое лишь временем переходного процесса приводов.
Однако применение данной системы в качестве комплекса наведения зенитного вооружения, в котором требуемые скорости и ускорения наведения значительно выше, масса и габариты ракет на порядок больше, ограничено следующими факторами:
затруднено размещение двух мощных приводов на внешней стороне башни из-за значительных их габаритов;
для эффективного поражения цели приводы пушек и направляющих должны быть постоянно подключены к работе, что приводит к нерациональному расходованию электроэнергии, также для обеспечения питания трех приводов требуется мощный источник питания, который занимает значительную часть полезного объема боевого отделения;
для управления мощными приводами необходимо три блока управления, в состав которых входят усилители мощности, имеющие существенные габариты и вес;
Задачей данного изобретения является снижение потребляемой мощности и массы системы вертикального наведения зенитного вооружения.
Решение поставленной задачи достигается тем, что в системе вертикального наведения зенитного вооружения, содержащей вращающуюся башню, оборудованную двумя автоматическими пушками, размещенными на качающейся части, кинематически связанной с датчиком положения пушек и снабженной следящим приводом, и блоки направляющих для установки контейнеров с зенитными ракетами, симметрично расположенные с внешней стороны башни соосно с качающейся частью и кинематически связанные с приводами и датчиками положения направляющих, привод пушек и приводы направляющих выполнены гидравлическими с регулируемым гидронасосом, исполнительный двигатель привода направляющих выполнен в виде гидроцилиндра, шток и корпус которого закреплены на каждой направляющей и корпусе башни соответственно, при этом гидродвигатель привода пушек и гидроцилиндры соединены силовыми магистралями через введенные гидравлические распределители, имеющие командные входы "ЛЕВЫЙ БЛОК" и "ПРАВЫЙ БЛОК", с регулируемым гидронасосом, выходы датчиков положения направляющих и датчика положения пушек подключены через введенный первый селектор, имеющий командные входы "ЛЕВЫЙ БЛОК" и "ПРАВЫЙ БЛОК", к первому входу измерителя рассогласования привода пушек, второй вход которого является входом системы вертикального наведения, а выход соединен с входами корректирующего устройства привода пушек и корректирующего устройства привода направляющих, выходы которых подключены через второй введенный селектор, имеющий командный вход "РАКЕТА", к входу регулируемого гидронасоса.
Использование гидроцилиндра в качестве исполнительного двигателя для перемещения блоков направляющих решает проблему компоновки мощных приводов снаружи башни, так как при выдвижении штока гидроцилиндр занимает рабочую зону направляющих, определяемую шириной направляющих и максимальным углом возвышения.
Наличие у каждого объекта системы (блоков направляющих и автоматических пушек) автономного гидравлического привода, питаемого от единого регулируемого гидронасоса и управляемого от одного общего электронного блока, позволяет значительно снизить массу и габариты управляющей части системы вертикального наведения.
Поскольку в конкретном режиме работы системы задействован только один из трех приводов - в несколько раз снижается потребляемая мощность всей системы, а также снижаются требуемая мощность и, соответственно, габариты и масса источника питания. Гидравлические системы позволяют легко производить поочередное подключение питания к исполнительным двигателям за счет установки в силовых магистралях, соединяющих гидронасос с гидродвигателями, гидравлических распределителей, при этом время готовности пушек или блоков направляющих к работе определяется лишь временем перевода соответствующего привода на заданный угол возвышения.
На чертеже представлена функционально-кинематическая схема системы вертикального наведения зенитного вооружения.
Система вертикального наведения зенитного вооружения содержит вращающуюся башню 1, оборудованную двумя автоматическими пушками 2 и 3, размещенными на качающейся части 4, и блоками направляющих 5 и 6 для установки контейнеров с зенитными ракетами, установленными соосно с вращающейся частью, на блоках направляющих шарнирно закреплены штоки гидроцилиндров 7 и 8, корпуса которых шарнирно закреплены на башне, подача рабочей жидкости по силовым магистралям в гидроцилиндры и гидродвигатель привода пушек 9 производится от регулируемого гидронасоса 12 через первый и второй гидравлические распределители 10 и 11, имеющие командные входы "ЛЕВЫЙ БЛОК" и "ПРАВЫЙ БЛОК", датчики положения левого и правого блоков 13 и 14 кинематически связаны с соответствующими блоками направляющих, выходы которых, вместе с выходом датчика положения пушек 15, подключены через первый селектор 16, имеющий командные входы "ЛЕВЫЙ БЛОК" и "ПРАВЫЙ БЛОК", к первому входу измерителя рассогласования 17, второй вход измерителя рассогласования является входом системы вертикального наведения, а выход соединен с входами корректирующего устройства привода пушек 18 и корректирующего устройства привода направляющих 19, выходы которых подключены через второй селектор 20, имеющий командный вход "РАКЕТА", к входу регулируемого гидронасоса 12.
Предлагаемая система работает следующим образом.
В режиме работы зенитными пушками на командные входы первого и второго селекторов 16 и 20, а также гидравлических распределителей 10 и 11 сигналы не подаются. При этом к входу измерителя рассогласования 17 подключен датчик положения пушек 15, к входу регулируемого насоса 12 - выход корректирующего устройства привода пушек 18, регулируемый гидронасос силовыми магистралями через гидравлические распределители 10 и 11 соединен с гидродвигателем привода пушек 9, - таким образом, сформирован замкнутый контур следящего привода пушек. По сигналам, поступающим на вход системы, пушки перемещаются на заданный угол возвышения. Для перехода в режим работы ракетами на командные входы первого селектора 16, гидравлических распределителей 10 и 11 подается сигнал "ЛЕВЫЙ БЛОК" или "ПРАВЫЙ БЛОК" в зависимости от выбора блока направляющих, на командный вход второго селектора 20 - сигнал "РАКЕТА", тем самым замыкается контур привода направляющих, сформированный из выбранного блока направляющих 5 и 6, соответствующего датчика положения 13 и 14, измерителя рассогласования 17, корректирующего устройства привода направляющих 19, регулируемого гидронасоса 12 и соответствующего гидроцилиндра 7 и 8. Выбранный блок направляющих переводится из походного положения на заданный угол возвышения по сигналам, поступающим на вход системы. Время перевода в режим работы ракетами определяется только временем отработки ступенчатого входного сигнала приводом направляющих.
Таким образом, предлагаемое изобретение позволяет значительно снизить массу и габариты приводов наведения пушек и направляющих с зенитными ракетами, а также снизить в несколько раз потребляемую мощность системы вертикального наведения зенитного вооружения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент RU 2205342 С2, Мкл.7 F 41 А 23/34.
2. Заявка №2002103438/02 от 5.02.2002. RU, МПК7 F 41 A 23/00. Информационный бюллетень "Изобретения, полезные модели", №24, 2003 г. Стр.347. Прототип.
3. Гамынин Н.С. Основы следящего гидравлического привода. Оборонгиз. М., 1962 г.
4. Богданович Л.Б. Гидравлические приводы в машинах. Машгиз. М., 1962 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2006 |
|
RU2325561C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2001 |
|
RU2205342C2 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2001 |
|
RU2200291C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Зенитное орудие | 2016 |
|
RU2639378C1 |
| ЗЕНИТНЫЙ САМОХОДНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2316709C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| БОЕВОЙ МОДУЛЬ ЗЕНИТНОГО САМОХОДНОГО КОМПЛЕКСА | 2006 |
|
RU2331832C2 |
| Подвижный боевой модуль | 2023 |
|
RU2825789C1 |
Изобретение относится к военной технике и может быть использовано в зенитных ракетных комплексах. Технический результат - снижение потребляемой мощности и массы системы вертикального наведения зенитного вооружения. Решение поставленной задачи достигается тем, что в системе вертикального наведения зенитного вооружения, содержащей вращающуюся башню, оборудованную двумя автоматическими пушками, размещенными на качающейся части, кинематически связанной с датчиком положения пушек и снабженной следящим приводом, и блоки направляющих для установки контейнеров с зенитными ракетами, симметрично расположенные с внешней стороны башни соосно с качающейся частью и кинематически связанные с приводами и датчиками положения направляющих, привод пушек и приводы направляющих выполнены гидравлическими с регулируемым гидронасосом. Исполнительный двигатель привода направляющих выполнен в виде гидроцилиндра, шток и корпус которого закреплены на каждой направляющей и корпусе башни соответственно. При этом гидродвигатель привода пушек и гидроцилиндры соединены силовыми магистралями через введенные гидравлические распределители, имеющие командные входы «ЛЕВЫЙ БЛОК» и «ПРАВЫЙ БЛОК», с регулируемым гидронасосом, выходы датчиков положения направляющих и датчика положения пушек подключены через введенный первый селектор, имеющий командные входы «ЛЕВЫЙ БЛОК» и «ПРАВЫЙ БЛОК», к первому входу измерителя рассогласования привода пушек, второй вход которого является входом системы вертикального наведения, а выход соединен с входами корректирующего устройства привода пушек и корректирующего устройства привода направляющих, выходы которых подключены через второй введенный селектор, имеющий командный вход «РАКЕТА», к входу регулируемого гидронасоса. 1 ил.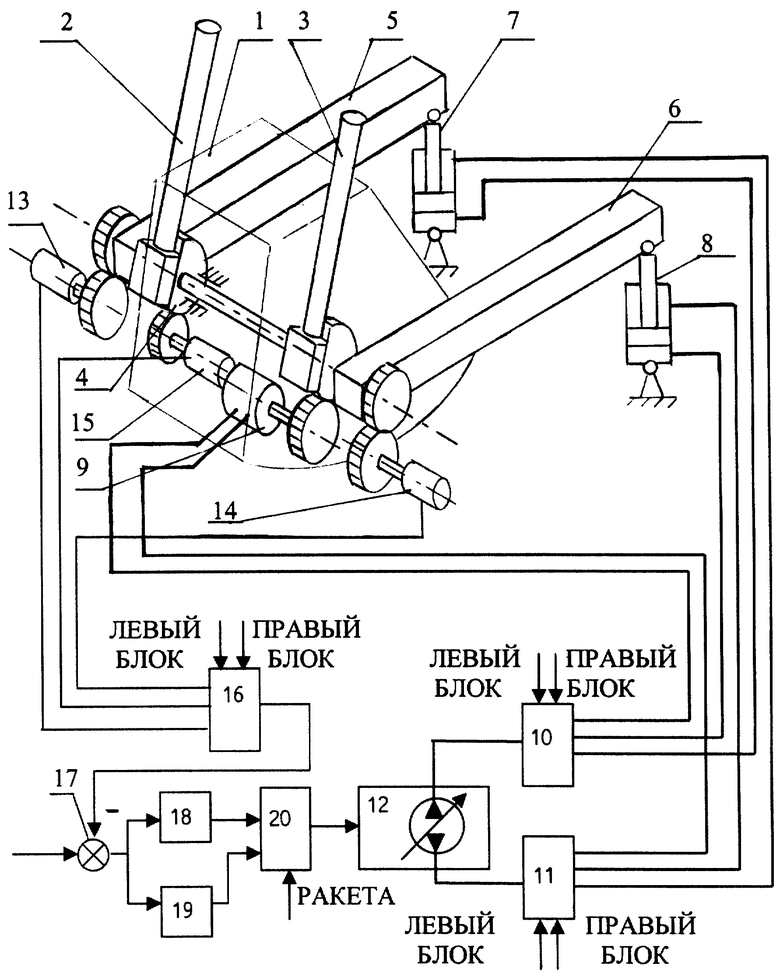
Система вертикального наведения зенитного вооружения, содержащая вращающуюся башню, оборудованную двумя автоматическими пушками, размещенными на качающейся части, кинематически связанной с датчиком положения пушек и снабженной следящим приводом, и блоки направляющих для установки контейнеров с зенитными ракетами, симметрично расположенные с внешней стороны башни соосно с качающейся частью и кинематически связанные с приводами и датчиками положения направляющих, отличающаяся тем, что привод пушек и приводы направляющих выполнены гидравлическими с регулируемым гидронасосом, исполнительный двигатель привода направляющих выполнен в виде гидроцилиндра, шток и корпус которого закреплены на каждой направляющей и корпусе башни соответственно, при этом гидродвигатель привода пушек и гидроцилиндры соединены силовыми магистралями через введенные гидравлические распределители, имеющие командные входы «ЛЕВЫЙ БЛОК» и «ПРАВЫЙ БЛОК», с регулируемым гидронасосом, выходы датчиков положения направляющих и датчика положения пушек подключены через введенный первый селектор, имеющий командные входы «ЛЕВЫЙ БЛОК» и «ПРАВЫЙ БЛОК», к первому входу измерителя рассогласования привода пушек, второй вход которого является входом системы вертикального наведения, а выход соединен с входами корректирующего устройства привода пушек и корректирующего устройства привода направляющих, выходы которых подключены через второй введенный селектор, имеющий командный вход «РАКЕТА», к входу регулируемого гидронасоса.
| RU 2002103438 А, 27.08.2003 | |||
| US 5210371 А, 11.05.1993 | |||
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "САЛАТ С КРАБАМИ" | 2013 |
|
RU2511141C1 |
| DE 3536858 C1, 06.11.1986. | |||

