Область техники
Данное техническое решение относится к области компьютерной технологии в военном деле, а именно к определению траектории полета воздушной цели для решения задачи поражения воздушной цели огневыми средствами боевой машины.
Уровень техники
Аналогом заявляемого технического решения является СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА (патент на изобретение RU 2102686 С1, заявка 3176650 от 25.12.1995, МПК F41G 7/28, опубликовано 20.01.1998, патентообладатель Научно-исследовательский электромеханический институт) [1], содержащая
1. Радиолокатор сопровождения цели, имеющий общую ось вращения по азимуту с пусковой установкой, на котором подвижно установлен радиолокатор сопровождения радиоответчика, включающий антенну, приемник, следящие системы, имеющие ограниченные углы поворота, и передатчик запросных сигналов и команд на ракету, снабженную последовательно соединенными приемником, дешифратором, автопилотом и органами управления, радиоответчиком, подключенным к дешифратору, отличающаяся тем, что, с целью обеспечения ближней границы зоны поражения при увеличении боезапаса ракет, размещаемых на пусковой установке самоходного зенитного комплекса, за счет вертикального расположения направляющих пусковой установки, в нее введены вычислитель углов склонения, запоминающий элемент, радиомаяк, пеленгатор радиомаяка, определитель рассогласований, коммутатор и устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика, причем вычислитель углов склонения связан входом с радиолокатором сопровождения цели, а выходом с запоминающим элементом в автопилоте ракеты, на которой размещен радиомаяк, а пеленгатор радиомаяка, определитель рассогласований и коммутатор соединены последовательно, при этом устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчика соединены входом с выходом пеленгатора радиомаяка, а определитель рассогласований связан входом с выходом следящих систем радиолокатора сопровождения радиоответчика, подключенных входами через коммутатор к собственному приемнику и пеленгатору радиомаяка.
2. Система по п.1, отличающаяся тем, что вычислитель углов склонения состоит из двух каналов, каждый из которых содержит последовательно включенный умножитель и сумматор, при этом первые входы умножителей первого и второго каналов соответственно подключены к датчикам угломестной и азимутальной угловых скоростей радиолокатора сопровождения цели, а вторые входы - к датчику постоянного сигнала времени автономного полета, вторые входы сумматоров соединены с датчиками угла места и азимута радиолокатора сопровождения цели, а третьи входы сумматоров - с датчиками угла возвышения и полного угла горизонтального наведения пусковой установки.
3. Система по п.1, отличающаяся тем, что радиомаяк выполнен в виде последовательно включенных кварцевого генератора, компаратора и делителя частоты, подключенного выходом к блокинг-генератору радиоответчика.
4. Система по п.1, отличающаяся тем, что пеленгатор радиомаяка содержит моноконическую антенно-волноводную систему с трехканальным облучателем рупорного типа, связанным с модулятором и сумматором коаксиальными кабелями, двухканальный приемник и следящие приводы, при этом модулятор антенно-волноводной системы выполнен в виде электронного коммутатора, подключенного к генератору прямоугольных импульсов частоты порядка 100 500 Гц.
5. Система по п.1, отличающаяся тем, что определитель рассогласований состоит из двух каналов, каждый из которых содержит последовательно соединенные сумматор, определитель модуля и схему сравнения и подключен к выходной схеме совпадений, связанной третьим входом через схему сравнения с выходом приемника радиолокатора сопровождения радиоответчика, при этом выходы следящих систем подключены к первым входам сумматоров, подключенных вторыми входами к выходам пеленгатора радиомаяка, связанным через последовательно соединенные определитель модуля и схему сравнения с четвертым и пятым входами выходной схемы совпадений.
6. Система по п.1, отличающаяся тем, что антенна радиолокатора сопровождения радиоответчика выполнена в виде малоэлементной фазированной решетки, а устройство расширения диаграммы направленности радиолокатора сопровождения радиоответчка содержит набор датчиков постоянных напряжений, подключаемых к входам усилителей мощности, подключенных выходами к управляющим обмоткам фазовращателей фазированной антенной решетки, при этом величины напряжений датчиков соответствуют ступенчатой аппроксимации параболы, симметричной относительно центрального элемента набора.
Недостатком аналога является необходимость активного сопровождения цели и ракеты все время от момента пуска ракеты до поражения цели, что снижает возможность противодействия средствам радиоэлектронной борьбы.
Другим аналогом заявляемого технического решения является ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС (патент на изобретение RU 2131577 С1, заявка 98110047/02 от 27.05.1998, МПК F41G 7/20, опубликовано 10.06.1999, патентообладатель Конструкторское бюро приборостроения, г.Тула) [2], включающий в себя башню с приводом наведения и размещенные на ней радиолокационную станцию обнаружения цели, радиолокационную станцию сопровождения цели и ракеты (ССЦР), содержащую приводы наведения, блоки выделения координат цели и ракеты, пусковые установки с зенитными управляемыми ракетами (ЗУР), зенитными автоматами и приводом наведения по углу места, вычислительную систему, содержащую блок выдачи целеуказания по угловым координатам и дальности для нескольких целей, блок вычисления зонных параметров, блок выработки команд управления ЗУР, блок выработки углов отворота пусковых установок и башни, пульт пуска, отличающийся тем, что в состав комплекса введена и размещена на башне оптико-электронная система (ОЭС), содержащая тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, антенну с передатчиком команд ЗУР и приводы наведения ОЭС по углу места и азимуту с датчиками углов, а в вычислительную систему введены второй блок вычисления зонных параметров, второй блок выработки команд управления ЗУР и логическое устройство, содержащее схему разности, схему сравнения, две схемы задержки, три схемы И, четыре схемы ИЛИ, три пороговых устройства, два ключа, два переключателя и регистры памяти кодов адресов ЗУР, при этом выходы телеавтомата соединены одновременно с первыми входами второго блока выработки команд управления, первыми входами второго блока вычисления зонных параметров и входами приводов ОЭС, датчики которых подключены ко вторым входам второго блока вычисления зонных параметров и вторым управляемым входам первого переключателя, первые управляемые входы которого подключены к выходам блока выделения координат цели ССЦР по углам, а третий вход второго блока вычисления зонных параметров соединен с выходом блока выдачи целеуказания по дальности для второй цели, причем выходы блока выдачи целеуказания по угловым координатам для второй цели подключены на входы телеавтомата, при этом сигнальные выходы ИК-пеленгатора соединены со вторыми входами второго блока выработки команд управления ЗУР, выход которого подключен на вход передатчика команд ОЭС, причем первые выходы блоков вычисления зонных параметров через схему разности и пороговое устройство соединены с первым входом первой схемы ИЛИ, выход которой подключен к первому входу второй схемы ИЛИ, а вторые выходы блоков вычисления зонных параметров через схему сравнения соединены со вторым входом первой схемы ИЛИ и через пороговые устройства, ключи, вторые входы первой и второй схем И, четвертую схему ИЛИ подключены к третьему входу третьей схемы И, первый вход которой соединен через вторую схему задержки с первым выходом пульта пуска, который одновременно подключен к первым входам первой и второй схем И, а второй вход третьей схемы И через первую схему задержки и третью схему ИЛИ соединен с логическими выходами блока выделения координат ЗУР ССЦР и ИК-пеленгатора, которые одновременно подключены к управляющим входам соответствующих ключей, при этом выход третьей схемы И соединен с первым входом пульта пуска и вторым входом второй схемы ИЛИ, выход которой подключен к управляющим входам переключателей, причем выходы первого переключателя соединены со входами блока выработки углов отворота пусковых установок и башни, а выходы регистров памяти кодов адресов ракеты подключены к управляемым входам второго переключателя, выход которого через второй вход пульта пуска соединен с зенитной управляемой ракетой в момент ее пуска.
Недостатком этого аналога является наведение автоматических пушек 2А72 для стрельбы по упрежденной точке цели при линейной аппроксимации траектории движения цели, что снижает вероятность поражения для маневрирующей цели.
Следующим аналогом (прототипом) заявляемого технического решения является СПОСОБ ВЕДЕНИЯ ОГНЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ВЫСОКОТЕМПНЫМИ ПУШКАМИ (патент РФ на изобретение RU 2184336 С2, от 14.02.2000, заявка 2000103633/02, МПК F41F 1/00, F41G 3/00, F41G 5/00, опубликовано 27.06.2002, патентообладатель Государственное унитарное предприятие «Конструкторское бюро приборостроения») [3].
1. Способ ведения огня высокотемпными пушками по целям, в том числе групповым, заключающийся в обнаружении, выборе опасных целей, сопровождении целей, определении признака "цель в зоне", определении времени нахождения цели в зоне огня, длительности очереди и обстрела цели, отличающийся тем, что в зависимости от времени нахождения цели в зоне огня определяют количество очередей на стрельбу по цели, фиксируют время от момента последнего выстрела предыдущей стрельбы по цели до момента открытия огня последующей стрельбы, а затем, в зависимости от этого времени и количества очередей за стрельбу с использованием эмпирических коэффициентов, которые учитывают износ стволов при их температурном нагреве в процессе стрельбы, последовательно определяют время непосредственной стрельбы, длительность каждой очереди и перерывы между очередями, в соответствии с которыми производят обстрел цели.
2. Система управления огнем высокотемпными пушками, содержащая средства обнаружения и сопровождения целей, вычислительную систему, включающую в себя блок выбора цели для обстрела, вход которого подключен к выходу средства обнаружения, а выход блока выбора цели для обстрела соединен со входами средств сопровождения, блок расчета зонных параметров целей, входы которого подключены к выходам средств сопровождения, блок выработки сигналов наведения приводов пушки, вход которого подключен ко второму выходу блока расчета зонных параметров, и таймер, приводы наведения пушки, вход которых соединен с выходом блока выработки сигналов наведения приводов пушки, высокотемпную пушку, содержащую электроспуск и датчик переднего положения ползуна, отличающаяся тем, что в состав вычислительной системы введены два селектора импульсов, схема И, последовательно соединенные блок расчета параметров режима обстрела цели и формирователь сигнала управления стрельбой, первый выход которого одновременно соединен с электроспуском пушки и сигнальными входами селекторов импульсов, селекторные входы которых соединены соответственно со вторым и третьим выходами формирователя сигнала управления стрельбой, при этом выход первого селектора импульсов через схему И, второй вход которой подключен к датчику переднего положения ползуна, соединен с пусковым входом таймера, сбросовый вход которого соединен с выходом второго селектора импульсов, а выход таймера соединен со вторым входом блока расчета параметров режима обстрела цели, первый вход которого соединен с первым выходом блока расчета зонных параметров.
Недостатком прототипа является необходимость экстраполирования траектории сопровождаемой цели на значительное время упреждения для определения зонных параметров цели, что в случае маневрирующей цели может привести к ошибке расчета параметров режима обстрела целей.
Сущность изобретения
Постановка задачи
Сопровождение цели боевой машиной (БМ) включает сопровождение цели станцией сопровождения (ССЦ), наведение зенитного автомата (ЗА) в точку прицеливания, наведение ракет в текущую точку цели и наведение на цель локатора ССЦ в режиме инерциального сопровождения (с отключением облучения цели). Для решения этих задач по координатам цели на участке наблюдения определяется положение кривой в пространстве. Положение кривой в пространстве может быть задано координатами начальной точки кривой и параметрами функций изменения координат, в совокупности составляющими параметры начальных условий. Эти параметры позволяют определить положение точки цели для любого заданного момента времени. Таким образом, возможность решения задач сопровождения цели сводится к определению параметров начальных условий траектории цели.
Формулы Френе-Серре однозначно определяют положение кривой в пространстве, если заданы функции кривизны и кручения для этой кривой [4]. Ограничения накладываются точностью координат цели, поступающих от ССЦ. Для определения кручения используются значения третьей производной координат. Получение этих значений в настоящее время требует практически неприемлемого большого наблюдательного времени. Кручение приходится считать нулевым, а это значит, что траектория цели может лежать только на плоскости. Другое ограничение связано с тем, что кривизну, определенную на участке наблюдения, приходится считать постоянной для дальнейшего движения цели. При постоянной кривизне траектория может быть аппроксимирована дугой окружности. Еще одно ограничение связано с тем, что тангенциальное ускорение, определенное на участке наблюдения, приходится считать постоянным на участке наблюдения и нулевым для дальнейшего движения цели, так как ускоренное движение цели - это кратковременное движение. Эти обстоятельства накладывают ограничения на вычисление параметров начальных условий, определяющих траекторию цели. Предлагаемый способ получения параметров начальных условий траектории цели учитывает эти ограничения.
Траектория движения цели определяется в левой прямоугольной системе координат Oxyh. Начало системы координат совпадает с точкой пересечения оси вращения башни самохода с плоскостью погона самохода. Положительное направление оси х - направление на Север. Положительное направление оси h - направление в Зенит. Ось у дополняет систему координат до левой прямоугольной системы координат. Выбор такой системы координат определяется тем, что для определения положения линии выстрела зенитного автомата используются таблицы стрельбы, а для определения времени пуска ракеты используются таблицы зон пуска ракеты. Обе эти таблицы содержат значения, определенные относительно поверхности Земли.
Входными данными для определения траектории цели являются значения текущих координат точки цели, определяемые станцией сопровождения цели (ССЦ). ССЦ определяет азимут цели β∗, угол места цели ε∗ и наклонную дальность цели d. Эти параметры определяются в системе координат Ox1y1h1, связанной с осями корпуса самохода. Ось Ox1 лежит на линии продольной оси самохода, в направлении от «кормы» на «нос». Ось Oy1 лежит на линии поперечной оси самохода, в направлении «левый борт», «правый борт», если смотреть с «кормы» самохода. Ось Oh1 дополняет оси Ox1 и Oy1 до левой прямоугольной системы координат.
Перевод значений β∗ и ε∗ из системы координат Ox1y1h1 в систему координат Oxyh выполняется по значениям угла курса К, угла качки ψ и угла тангажа θ. Значения этих углов вырабатываются устройством гироазимутгоризонт (ГАГ). Угол курса К - угол между направлением оси Ох и проекцией оси Ox1 на плоскость Оху, угол качки ψ - угол оси Ox1 с плоскостью Оху, угол тангажа θ - угол оси Oy1 с плоскостью Оху. Значения азимута цели β и угла места цели ε в системе координат Oxyh определяются следующим образом:
β=K+Arctg(A/B),
где А=Cosε∗Sinβ∗Cosθ+Sinε∗Sinθ,
В=Cosε∗Cosβ∗Cosψ-Sinε∗Cosβ∗Sinψ+Cosε∗Sinβ∗Sinθ Sinψ,
ε=Arcsin(Cosε∗Cosβ∗Sinψ+Sinε∗Cosβ∗Cosψ-Cosε∗Sinβ∗SinθCosψ).
Входные данные алгоритма определения параметров начальных условий траектории движения цели, то есть текущие координаты точки цели (хс, yc, hc) в системе координат Oxyh, определяются следующим образом:
xc=dCosβCosε,
yc=dSinβCosε,
hc=dSinε.
Сглаживание параметров
Для вычисления параметров начальных условий выполняется сглаживание. Получение сглаженного значения дискретного параметра по n значениям параметра на интервале времени Т выполняется методом прямоугольников [5]:
 nΔt=T,
nΔt=T,
где Δt - шаг дискретизации.
Метод дает хорошее приближение при малом шаге дискретизации, однако суммирование большого количества значений параметров не соответствует в настоящее время производительности бортовых ЭВМ. Поэтому для сглаживания используются кольцевые регистры и накапливающие сумматоры. Регистры накапливают текущие значения параметров, сумматоры содержат суммы значений параметров, содержащихся в регистрах. В каждый момент времени (в каждом такте) регистр содержит линейную последовательность массивов (записей) входных параметров, отмеченных индексами первой и последней записи.
Получение суммы значений параметра сводится к корректировке сумматора. Корректировка выполняется путем добавления к текущей сумме вновь поступившего в регистр значения для этого параметра и вычитания значения параметра, «выталкиваемого» из кольцевого регистра для этого параметра. Вычитание выполняется в стационарном режиме накопления параметров, то есть когда количество накопленных записей стало равным максимальному количеству записей для регистра. Максимальное количество записей определяется интервалом поступления входных отметок и допустимым временем участка наблюдения и получается как компромиссное значение между точностью локации и требованием минимального работного времени по цели.
Определения параметров начальных условий
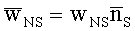
На фиг.1 показана схема определения параметров начальных условий траектории цели. На фиг.2 показан отрезок траектории цели, на котором отмечены временные участки, параметры для которых накоплены в регистрах уровней А, В, С. На уровне А выполняется сглаживание текущих координат цели. Сглаженные координаты накапливаются в регистрах уровня В. По значениям координат, накопленных в регистрах В, определяются скорости и ускорения [6].
Значение модуля вектора скорости:
 ,
,
значение модуля вектора нормальной составляющей ускорения:
 .
.
Составляющие скорости и ускорения, входящие в эти выражения, определяются по значениям координат в записях регистров В, соответствующих точкам а и с траектории, и сглаженным значениям координат точки b. Каждая запись а и с содержит сглаженные на уровне А координаты и время, соответствующее этим координатам. Координатам точки b соответствует «сглаженное» время tb. Составляющие скорости и ускорения по оси х определяются по следующим выражениям:
 ,
,

Составляющие скорости и ускорения по осям у, h вычисляются аналогично. Значение угловой скорости для дуги траектории определяется по выражению:
Значения ω',  и ν', определенные таким способом, содержат методическую ошибку: временной интервал соответствует времени пути по дуге траектории, а расстояние - это спрямленный отрезок дуги траектории. Поправки на ошибку выполняются с использованием выражений:
и ν', определенные таким способом, содержат методическую ошибку: временной интервал соответствует времени пути по дуге траектории, а расстояние - это спрямленный отрезок дуги траектории. Поправки на ошибку выполняются с использованием выражений:
ω=(4/Tb)arctg(ω'(Tb/4)),
v=ν'(ω(Tb/2))/sin(ω(Tb/2)),
wN=ω v,
где Tb=ta-tc.
Полученные на уровне В параметры скорости и особенно ускорения включают значительную шумовую составляющую. Как показали результаты исследований на модели способов сглаживания векторных величин, сглаживание отдельно модуля вектора и отдельно его направления повышает точность определения составляющих вектора. В частности, при равномерном движении цели значения v и wn - константы, поэтому возможно их сглаживание на большем временном интервале без искажений.
Для сглаживания на уровень С передаются значения v, wN и направление скорости и ускорения.
Направление скорости задается вектором  , направляющие косинусы τX, τY, τH вектора
, направляющие косинусы τX, τY, τH вектора  определяются по выражениям:
определяются по выражениям:
 ,
,
 ,
,
 .
.
Направление нормальной составляющей ускорения определяется вектором  ,
,
где  .
.
Направляющие косинусы nX, nY, nH вектора  в системе координат Oxyh определяются по выражениям:
в системе координат Oxyh определяются по выражениям:
 ,
,
 ,
,
 .
.
Направление тангенциальной составляющей ускорения определяется вектором:  ,
,
где значение модуля вектора тангенциальной составляющей ускорения:
 .
.
По сглаженным на уровне С значениям модулей векторов vs, wTS, wNS и сглаженным значениям составляющих векторов  ,
,  восстанавливаются значения векторов
восстанавливаются значения векторов  ,
,  ,
,  :
:
 ,
,
 ,
,
 .
.
По сглаженным значениям vs и wNS восстанавливается значение угловой скорости ωs:
ωs=wNS/vs.
Блок параметров начальных условий создается в каждом такте при поступлении текущих координат цели от ССЦ. Блок параметров содержит:
х0, y0, h0 - координаты радиус-вектора  точки t0,
точки t0,
vx, vy, vh - составляющие скорости  точки ts,
точки ts,
wnx, wny, wnh - составляющие нормального ускорения  точки ts,
точки ts,
wτx, wτy, wτh - составляющие тангенциального ускорения  точки ts,
точки ts,
ωs - значение угловой скорости,
σ - среднеквадратичная ошибка входных координат,
t - время создания блока начальных условий,
t0 - время начальной точки траектории,
ts - время точки траектории, для которой определены скорости и ускорения.
Краткое описание чертежей
На фиг.1 приведена схема определения параметров начальных условий траектории цели.
На фиг.2 показан отрезок траектории, на котором отмечены временные участки, параметры для которых накоплены в регистрах уровней А, В, С.
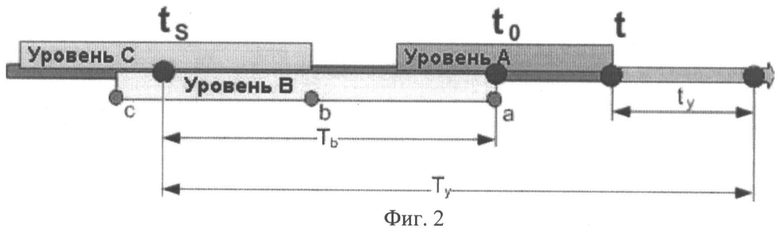
На фиг.3 показано сопровождение самолета, выполняющего маневр «змейка».
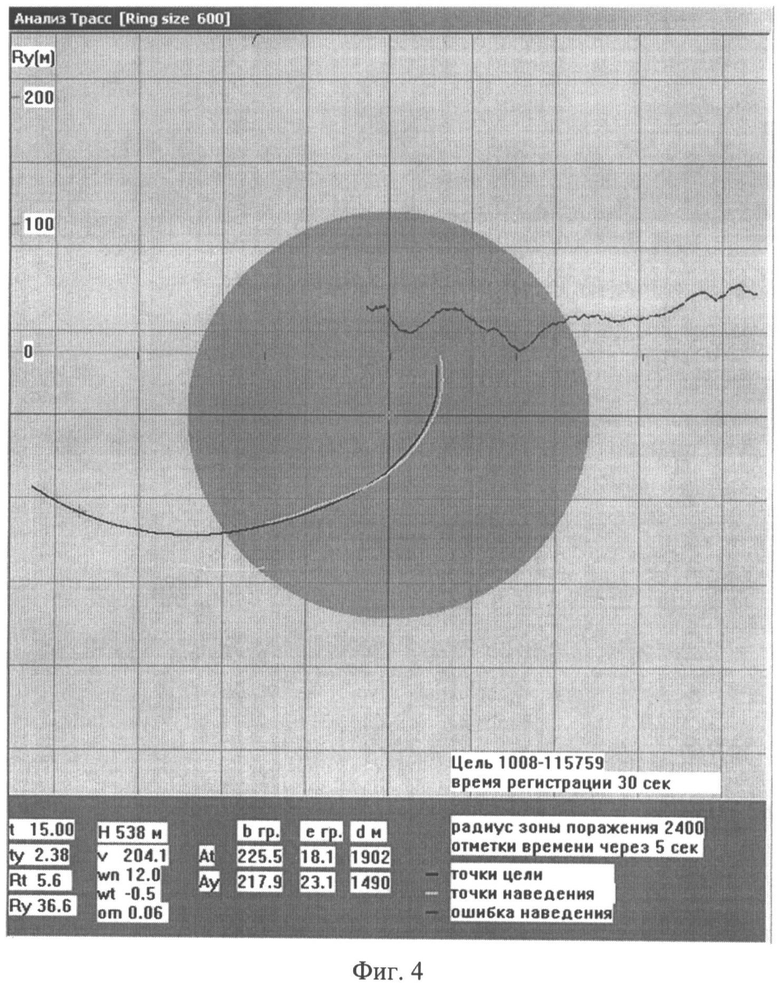
На фиг.4 приведены результаты сопровождения самолета F16.
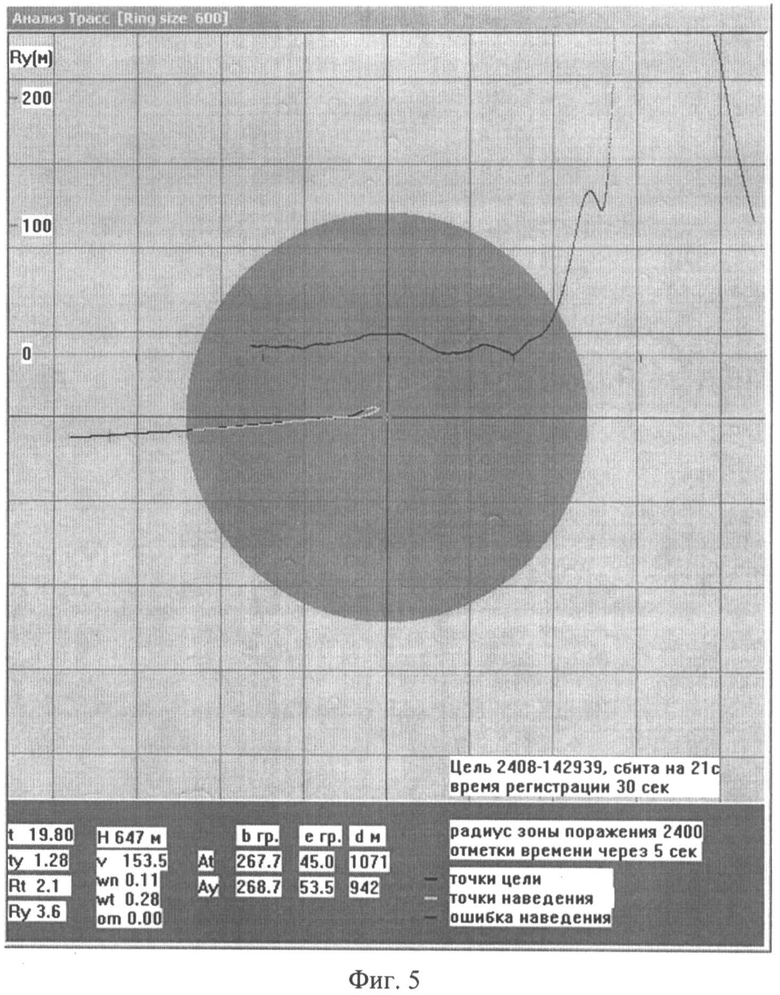
На фиг.5 показано сопровождение беспилотной цели, по которой выполнялась зачетная стрельба.
Пример варианта реализации заявляемого способа
Использование блока параметров начальных условий
Значения блока параметров позволяют определить уточненные координаты текущей точки цели, координаты точки цели следующего такта и координаты упрежденной точки для заданного времени упреждения. Уточненная текущая точка цели используется для наведения ракеты на цель. Точка цели в следующем такте используется для инерциального наведения локатора на цель. Упрежденная точка используется для решения задачи встречи снаряда с целью и для определения пространственного положения цели относительно зоны пуска ракеты.
Аппроксимация траектории цели по дуге окружности для заданного упрежденного времени ty выполняется при соблюдении нескольких условий. Условия включают скорость цели (не менее 40 м/сек), время от начала накопления параметров (не менее 3 сек), ошибки входных координат (σ не более 50 м). При выполнении этих условий координаты упрежденной точки определяются по следующему выражению:
 ,
,
где M1=(sin(Tyωs)-sin(Tb ωs))/ωs,
M2=(-cos(Tyωs)+cos(Tb ωs))/ωs 2,
Tb=t0-ts,
Ty=t-ts+ty.
Координаты упрежденной точки при линейной аппроксимации траектории цели определяются по следующему выражению:
 ,
,
где Ту=t-t0+ty.
Результаты использования предлагаемого способа
Оценка точности определения координат упрежденной точки выполнялась на цифровой модели, включающей генератор трасс, имитатор локатора и имитатор БМ. Генератор трасс выдает точные координаты текущей точки цели для заданных оператором параметров траектории движения. Для нелинейной траектории можно задать параметры изменения кручения и кривизны по линейному закону.
Имитатор локатора позволяет выдавать текущие координаты цели для заданной оператором траектории движения с равновероятным или нормальным законом распределения ошибок. Кроме этого, имитатор может восстановить работу реально работавшего локатора на полигоне по результатам регистрации. При этом восстанавливается аналитическая траектория цели на время полета.
Имитатор БМ позволяет учесть пространственные ограничения стрельбы, условия стрельбы и метеоусловия, влияющие на значение упрежденного времени ty. Для заданного сценария налета модель собирает статистику работы по цели и выдает результаты в графической и цифровой форме.
По результатам моделирования с использованием нормального закона распределения ошибок получен следующий обобщенный результат: если упрежденное время не превышает наблюдательное время, то ошибки координат упрежденной точки не превышают ошибки входных координат. Среднеквадратичная ошибка координат текущей точки цели в среднем на порядок меньше ошибки входных координат.
На фиг.3-фиг.5 приведены значения точности сопровождения целей. Эти значения получены по результатам регистрации работы изделия на полигоне. На этих чертежах показана проекция траектории цели на плоскости, упрежденная точка цели и отклонение Ry вычисленной упрежденной точки цели от фактического положения цели во время ty. Численные значения азимута (b), угла места (е), дальности (d), а также значения высоты (Н), скорости (v), нормального ускорения (wn) и угловой скорости (om) приведены для указанного на чертежах времени t от начала регистрации.
На фиг.3 показано сопровождение самолета, выполняющего маневр «змейка». Для такой сложной траектории наведение на цель с допустимыми ошибками выполняется только после накопления достаточного количества значений параметров. На фиг.4 показаны результаты сопровождения самолета F16. Особенность этой нелинейной траектория в том, что эта траектория цели не является дугой окружности и не лежит на плоскости. На фиг.5 показано сопровождение беспилотной цели, по которой выполнялась зачетная стрельба. Параметры цели указаны для момента времени открытия огня.
Промышленная применимость
Использование рассмотренного способа
Рассмотренный способ определения траектории полета цели внедрен для зенитного ракетно-пушечного комплекса ЗСУ-23-4М4 «Шилка».
Рассмотренный способ определения траектории цели перспективен: с повышением точности локации и с ростом производительности бортовых ЭВМ становится возможной работа по маневрирующим целям с большей нелинейностью траектории.
Отличительные свойства рассмотренного способа
1. Время вычисления параметров начальных условий постоянно и не зависит от количества накопленных параметров. Это практически снимает ограничение на длительность участка наблюдения.
2. При поступлении каждой новой отметки цели выполняется коррекция параметров на всех уровнях обработки, и формируются новые параметры начальных условий траектории. Эта новая траектория лежит уже в другой плоскости и с другим радиусом кривизны. При поступлении отметок с тактом в миллисекундном диапазоне это позволяет отслеживать цели с ненулевым кручением траектории (фиг.4) и отслеживать цели, радиус кривизны траектории которых изменяется (фиг.3).
3. Способ обеспечивает выполнение сопровождения цели в режиме с кратковременным отключением излучения локатора. При отключении локатора вычисленные значения координат цели следующего такта заменяют реальные. Сопровождение цели выполняется по вычисленным координатам точки цели следующего такта. При включении локатора входные реальные значения постепенно заменяют накопленные вычисленные, при этом переход на траекторию цели по реальным значениям происходит плавно, без скачка.
Проверка на полигоне режима работы с отключением локатора для цели с линейной траекторией показала возможность выключения локатора до 16 секунд без потери цели.
4. Блоки параметров начальных условий с интервалом 0,1 секунды сохраняются в стеке. Записи содержат среднеквадратичное значение шума входных координат. Это позволяет выполнить автоматический или полуавтоматический (по подсказке) переход в режим отключения локатора при включении источника внешних помех. Решение принимается по значению среднеквадратичного значения шума входных координат, превышающего пороговое значение. При этом для сопровождения цели выбираются сохраненные параметры начальных условий, ближайшие к текущему времени, и с допустимым значением ошибки.
5. Независимость вычислений от количества накопленных параметров в регистрах обеспечивает возможность адаптации сопровождения цели к условиям локации. Для благоприятных условий (ошибки входных координат малы), участок наблюдения можно уменьшить, что позволяет сопровождать цели с большей нелинейностью траектории, и наоборот, при неблагоприятных условиях (беспилотная малая цель, далекий вертолет), наблюдательный участок можно увеличить, что повысит точность сопровождения. Контроль условий локации выполняется по значению σ.
Литература
1. Патент РФ на изобретение RU 2102686 С1 от 25.12.1995, опубликован 20.01.1998, МПК F41G 7/28, патентообладатель Научно-исследовательский электромеханический института.
2. Патент РФ на изобретение RU 2131577 С1 от 27.05.1998, опубликован 10.06.1999, МПК F41G 7/20, патентообладатель Конструкторское бюро приборостроения, г.Тула.
3. Патент РФ на изобретение RU 2184663 С2 от 14.02.2000, опубликован 27.06.2002, МПК F41F 1/00, F41G 3/00, F41G 5/00, патентообладатель Государственное унитарное предприятие «Конструкторское бюро приборостроения».
4. А.В.Погорелов. Дифференциальная геометрия. Москва, «Наука», 1974 г.
5. Б.С.Алешин, А.А.Афонин, К.К.Веремеенко и др. Ориентация и навигация подвижных объектов. Москва, ФИЗМАТЛИТ, 2006 г.
6. Л.Г.Лойцянский, А.И.Лурье. Курс теоретической механики. Москва, «Наука», 1982 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУСКА РАКЕТ ДЛЯ ПОДВИЖНЫХ ПУСКОВЫХ УСТАНОВОК | 2012 |
|
RU2504725C2 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 1997 |
|
RU2134892C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460963C2 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
Изобретение относится к области компьютерной технологии в военном деле, а именно к определению траектории полета воздушной цели для решения задачи поражения воздушной цели огневыми средствами боевой машины. Способ заключается во введении вторичной обработки радиолокационной информации, поступающей от станции сопровождения цели, с помощью средств вычислительной техники для оценки ошибки входной информации, для фильтрации входных данных и для определения положения в пространстве нелинейной траектории движения воздушной цели. Технический результат заключается в повышении эффективности боевого комплекса при поражении маневрирующей воздушной цели. 5 ил.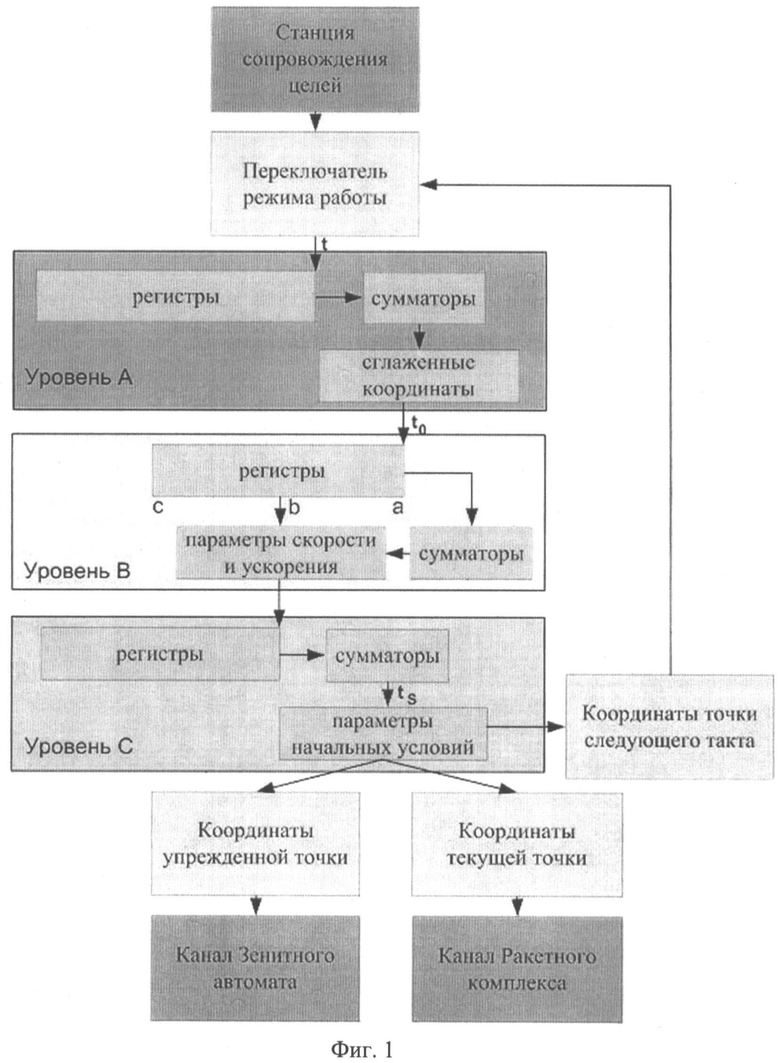
Способ получения параметров начальных условий нелинейной траектории движения воздушной цели с использованием текущих координат цели в прямоугольной системе координат 0xyh, получаемых по значениям азимута цели β*, угла места цели ε* и наклонной дальности цели d, поступающим от станции сопровождения цели, и значениям угла курса К, угла качки ψ и угла тангажа θ, поступающим от устройства гироазимутгоризонт, и использующий текущие координаты цели для обработки с помощью средств вычислительной техники, отличающийся нижеприведенным алгоритмом обработки следующих входных данных: xC, yC, hC, t - параметры текущей отметки цели, записанные в массив входных данных М[4] в указанной последовательности,
где xC, yC, hC - координаты цели, заданные в местной левой прямоугольной системе координат 0xyh,
t - время текущей отметки цели, отсчитываемое от момента времени постановки цели на сопровождение,
PT - признак, единичное значение которого означает «установить новую трассу», и последовательных шагов:
шаг 1 - если PT равно единице, то устанавливаются начальные значения параметров выполнения алгоритма:
- устанавливается максимальное количество записей для регистров PA[NA][5], PB[NB][5] и PC[NC][10] уровней А, В, С:
NA=TA/dT, если NA четное, то NA увеличивается на 1,
NB=TB/dT,
NC=TC/dT,
где NA, NB, NC - максимальное количество записей,
dT - временной интервал поступления входных отметок цели,
ТА, TB, TC - максимальные времена участков накопления параметров на уровнях А, В, С, определяемые как константы для конкретной станции сопровождения цели,
- устанавливаются начальные значения IA0, IA1, IA2, IB0, IB2, IC0, IC2 индексов записей в регистрах на уровнях А, В, С:
IA0=IB0=IC0=0,
IA1=IA2=IB2=IC2=-1,
где IA0, IB0, IC0 - значения индексов начальной записи в регистрах РА, PB, PC,
IA2, IB2, IC2 - значения индексов конечной записи в регистрах РА, PB, PC,
IA1 - значение индекса средней записи регистра РА,
- устанавливаются нулевые значения:
массивов накапливающих сумматоров SA[5], SB[5], SC[10] уровней А, В, С, признаков ZA, ZB, ZC режима накопления параметров уровней А, В, С (переходный режим накопления),
количества записей KА, KB, KC, накопленных на уровнях А, В, С;
шаг 2 - выполняется сглаживание входных данных отметки цели на уровне А:
- если ZA равно единице, то в стационарном режиме накопления параметров выполняется:
корректировка сумматоров SA:
SA[i]=SA[i]-PA[k][i],
где i принимает значения от 0 до 3, k=IA0,
корректировка индексов:
индексы IA0, IA1, IA2 инкрементируются, и если полученное значение индекса равно NA, то устанавливается нулевое значение этого индекса,
- если ZA равно нулю, то в переходном режиме накопления параметров выполняется:
корректировка количества записей:
KA=KA+1, если KA равно NA, то ZA=1,
корректировка индекса IA2:
IA2=IA2+1,
корректировка индекса IA1:
если значение KA нечетное, то индекс IA1 инкрементируется,
- выполняется запись параметров поступившей отметки цели в накапливающие регистры:
PA[k][i]=M[i],
где i принимает значения от 0 до 3, k=IA2,
- выполняется корректировка накапливающих сумматоров:
SA[i]=SA[i]+M[i],
где i принимает значения от 0 до 3,
- формируются выходные данные уровня А:
выполняется запись средних значений х0, y0, h0, t0 в массив выходных данных МА:
MA[0]=x0=SA[0]/KA,
MA[1]=y0=SA[1]/KA,
MA[2]=h0=SA[2]/KA,
MA[3]=t0=SA[3]/KA,
если ZA равно единице, то выполняется запись в массив МА квадрата отклонения мгновенного значения точки траектории PA[k][i] от среднего значения для этой точки траектории MA[i]:
MA[4]=(x0-PA[k][0])2+(y0-PA[k][1])2+(h0-PA[k][2])2,
где k=IA1;
шаг 3 - если ZA равно единице, то выполняется накопление и сглаживание выходных параметров уровня А на уровне В:
- если ZB равно единице, то выполняется:
корректировка сумматоров SB:
SB[i]=SB[i]-PB[k][i],
где i принимает значения от 0 до 4, k=IA0,
корректировка индексов IB0, IB2:
индексы IB0, IB2 инкрементируются, если значение индекса равно NB, то устанавливается нулевое значение этого индекса,
- если ZB равно нулю, то выполняется: корректировка количества записей на уровне В:
KB=KB+1, если KB равно NB, то ZB=1,
корректировка индекса IB2:
IB2=IB2+1,
- выполняется запись выходных параметров уровня А в накапливающие регистры:
PB[k][i]=MA[i],
где i принимает значения от 0 до 4, k=IB2,
- выполняется корректировка накапливающих сумматоров:
SB[i]=SB[i]+MA[i],
где i принимает значения от 0 до 4,
- определяются значения xB, yB, hB, tB, соответствующие среднему значению параметров, накопленных на уровне В:
xB=SB[0]/KB,
yB=SB[1]/KB,
hB=SB[2]/KB,
tB=SB[3]/KB,
- определяется значение среднеквадратичной ошибки входных координат σ:

шаг 4 - выполняется вычисление параметров начальных условий траектории цели с использованием значений первой и последней записей накапливающих регистров уровня В:
- определяются составляющие скорости:



где Tb=(PB[i][3]-PB[j][3]),
i=IB2,
j=IB0,
- определяются составляющие ускорения:



где Tb=(PB[i][3]-PB[j][3]),
i=IB2,
j=IB0,
- определяется значение модуля вектора скорости:
- определяется значение модуля вектора нормальной составляющей ускорения:

- определяется значение угловой скорости:
 ,
,
- по значениям ω',  и ν' вычисляются значения угловой скорости, модуля скорости и модуля нормального ускорения, с поправкой на время базы измерения параметров:
и ν' вычисляются значения угловой скорости, модуля скорости и модуля нормального ускорения, с поправкой на время базы измерения параметров:
ω=(4/Tb)arctg(ω'(Tb/4)),
v=ν'(ω(Tb/2))/sin(ω(Tb/2)),
wN=ωv,
- определяется значение модуля вектора тангенциальной составляющей ускорения:
 ,
,
- определяются направляющие косинусы τX, τY, τH вектора скорости:
 ,
,
 ,
,
 ,
,
- определяются направляющие косинусы nX, nY, nH вектора нормальной составляющей ускорения:
 ,
,
 ,
,
 ,
,
- выполняется запись следующих выходных параметров, полученных на уровне В, в массив выходных параметров МВ:
v, wN, wτ, τX, τY, τH, nX, nY, nH, tB;
шаг 5 - выполняется сглаживание выходных параметров уровня В:
- если ZC равно единице, то выполняется: корректировка сумматоров SC[10]:
SC[i]=SC[i]-PC[k][i],
где i принимает значения от 0 до 9, k=IC0,
корректировка индексов:
индексы IC0, IC2 инкрементируются, если значение индекса равно NC, то устанавливается нулевое значение этого индекса,
- если ZC равно нулю, то выполняется:
корректировка количества записей на уровне С:
KC=KC+1, если KC равно NC, то ZC=1,
корректировка индекса IC2:IC2=IC2+1,
- выполняется запись выходных данных уровня В в накапливающие регистры:
PC[k][i]-MB[i],
где i принимает значения от 0 до 9, k=IC2,
- выполняется корректировка накапливающих сумматоров:
SC[i]=SC[i]+MB[i], где i принимает значения от 0 до 9,
- определяются значения vS, wNS, wTS, τXS, τYS, τHS, nXS, nYS, nHS, tS, соответствующие сглаженным значениям выходных параметров уровня В:
vS=SC[0]/KC,
wNS=SC[1]/KC,
wTS=SC[2]/KC,
τXS=SC[3]/KC,
τYS=SC[4]/KC,
τHS=SC[5]/Kc,
nXS=SC[6]/KC,
nYS=SC[7]/KC,
nHS=SC[8]/KC,
tS=SC[9]/KC;
шаг 6 - выполняется вычисление параметров начальных условий по сглаженным значениям параметров на уровне С:
составляющие скорости vX, vY, vH:
vX=vS·τXS,
vY=vS·τYS,
vH=vS·τHS,
составляющие нормального ускорения wNX, wNY, wNH:
wNX=wNS·nXS,
wNY=wNS·nYS,
wNH=wNS·nHS, составляющие тангенциального ускорения wTX, wTY, wTH:
wTX=wTS·τXS,
wTY=wTS·τYS,
wTH=wTS·τHS,
значение угловой скорости ωs:
ωs=wNS/vs;
шаг 7 - формируются выходные данные, блок параметров начальных условий траектории цели, содержащий значения:
x0, y0, h0 - координаты начальной точки траектории,
vX, vY, vH - составляющие скорости,
wNX, wNY, wNH - составляющие нормального ускорения,
wTX, wTY, wTH - составляющие тангенциального ускорения,
ωs - значение угловой скорости,
σ - значение среднеквадратичной ошибки координат,
t - время создания блока начальных условий,
t0 - время начальной точки траектории,
tS - время точки траектории определения скорости и ускорения.
| СПОСОБ ВЕДЕНИЯ ОГНЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ВЫСОКОТЕМПНЫМИ ПУШКАМИ | 2000 |
|
RU2184336C2 |
| US 7755011 В2, 13.07.2010 | |||
| Струбцина для соединения под углом двух деталей в процессе их совместной обработки или монтажа | 1954 |
|
SU100215A1 |
| US 6573486 В1, 03.06.2003. | |||

