Предлагаемое изобретение относится к области автоматического регулирования и управления и может быть использовано в приводах наведения зенитных ракетно-пушечных комплексов.
Известен электрогидравлический привод (ЭГП) боевого отделения (RU 2002103438 А1, (ГУП «КБП»), 27.08.2003) зенитного ракетно-пушечного комплекса, где вертикальное наведение автоматической пушки и двух направляющих с ракетами осуществляется раздельными приводами.
Недостатком этого ЭГП является его большая масса, габариты, большое потребление энергии.
Известен ЭГП зенитного ракетно-пушечного комплекса (RU 2258886 С1, (ТУП «КБП»), 20.08.2005, принятый за прототип), содержащего вращающуюся башню с автоматическими пушками и два блока направляющих с контейнерами для ракет.
Установка с автоматическими пушками и блоки направляющих с ракетами кинематически разделены друг от друга.
Наведение установки с автоматическими пушками и блоков направляющих с ракетами производится раздельно электрогидравлическим приводом.
Недостатком описанного привода является то, что при отсутствии команд «Левый блок» и «Правый блок», когда поток рабочей жидкости от гидронасоса поступает на гидродвигатель, за счет остаточной производительности гидронасоса даже при отсутствии сигнала управления на его выходе будут создаваться давление и поток рабочей жидкости, которые будут осуществлять несанкционированное перемещение установки с пушками, а если она застопорена, то давление на выходе гидронасоса возрастет до срабатывания предохранительных клапанов в насосе, а также возникнут большие механические нагрузки на устройство стопорения.
Такой режим работы крайне нежелателен как для гидронасоса, так как снижает его эксплуатационную надежность, так и для привода в целом, так как может вызвать несанкционированное движение установки с пушками и не обеспечит стопорение установки в конкретном положении, а при застопоренной установке создает дополнительную механическую нагрузку на стопор.
Задачей, которую решает предлагаемое изобретение, является повышение эксплуатационной надежности привода за счет исключения нагрузки на гидронасос при отсутствии команд управления и расширение функциональных возможностей привода - обеспечение стопорения установки с пушками и блоков направляющих на любом фиксированном угле за счет запирания полостей исполнительных органов привода.
Решение поставленной задачи достигается тем, что в электрогидравлическом приводе, содержащем регулируемый гидронасос, вход которого связан с сигналом управления, блок гидрораспределителей, входы которого связаны с гидронасосом, первый гидроцилиндр, второй гидроцилиндр и гидродвигатель, связанные с выходами блока гидрораспределителей, два командных входа «Первый гидроцилиндр», «Второй гидроцилиндр», при этом блок гидрораспределителей выполнен в виде трех управляемых двухпозиционных четырехлинейных гидрораспределителей, причем первый вход первого гидрораспределителя соединен с первой напорной линией гидронасоса, второй вход первого гидрораспределителя - с первым входом второго гидрораспределителя, второй вход второго гидрораспределителя - с первым входом третьего гидрораспределителя, второй вход третьего гидрораспределителя - со второй напорной линией гидронасоса, при этом первый и второй входы каждого гидрораспределителя соединены между собой его внутренними полостями, закрытые выходы первого, второго и третьего гидрораспределителей соединены соответственно с полостями первого гидроцилиндра, гидродвигателя и второго гидроцилиндра; в него введено логическое устройство, первый вход которого соединен с командой «Первый гидроцилиндр», второй вход - с командой «Второй гидроцилиндр», первый выход логического устройства соединен со входом управления первого гидрораспределителя, второй выход - со входом управления второго гидрораспределителя, третий выход - со входом управления третьего гидрораспределителя, при этом сигнал управления на первом выходе логического устройства обеспечивается при подаче команды на первый вход логического устройства, на третьем выходе - при подаче команды на второй вход логического устройства, на втором выходе - при одновременной подаче команд на первый и второй входы логического устройства.
При этом логическое устройство содержит три двухвходовых логических элемента И и два логических элемента НЕ, причем первые входы первого и второго логических элементов И и вход второго логического элемента НЕ соединены с командой «Первый гидроцилиндр», вторые входы второго и третьего логических элементов И и вход первого логического элемента НЕ соединены с командой «Второй гидроцилиндр», выход первого логического элемента НЕ соединен со вторым входом первого логического элемента И, выход второго логического элемента НЕ соединен с первым входом третьего логического элемента И, выход первого логического элемента И является первым выходом, выход второго логического элемента И - вторым выходом, выход третьего логического элемента И - третьим выходом логического устройства.
Описанное исполнение блока гидрораспределителей позволяет разгрузить гидронасос от возникновения давления на его выходе при отсутствии команд на входе блока гидрораспределителей за счет замыкания напорных линий гидронасоса между собой через последовательно соединенные входы трех гидрораспределителей, которые при отсутствии команд попарно соединены между собой внутренними полостями гидрораспределителей. Одновременно указанное исполнение блока гидрораспределителей исключает возможность попадания остаточной производительности гидронасоса в исполнительный орган электрогидравлического привода - гидродвигатель и, следовательно, несанкционированное перемещение установки.
В то же время конструкция гидрораспределителей обеспечивает запирание полостей гидроцилиндров и гидродвигателя внутренними полостями гидрораспределителей, что обеспечивает удержание установки с пушками и направляющих с ракетами на постоянном угле. Введенное в привод логическое устройство позволяет из двух подаваемых команд «Первый гидроцилиндр» и «Второй гидроцилиндр» формировать три команды, управляющие поочередно тремя гидрораспределителями. При этом команда на управление гидрораспределителем, обеспечивающим соединение напорных линий гидронасоса с гидродвигателем, формируется при наличии обеих команд «Первый гидроцилиндр» и «Второй гидроцилиндр».
На чертеже показана функциональная схема предлагаемого электрогидравлического привода.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше результата, изложены ниже.
Привод содержит регулируемый гидронасос 1, блок гидрораспределителей 2, гидрораспределители 3 и 4, гидродвигатель 5, первый гидроцилиндр 6, второй гидроцилиндр 7, гидрораспределитель 8 и два командных входа «Первый гидроцилиндр», «Второй гидроцилиндр», причем вход гидронасоса 1 связан с сигналом управления, входы блока гидрораспределителей 2 связаны с гидронасосом 1, первый гидроцилиндр 6 и второй гидроцилиндр 7 связаны с выходами блока гидрораспределителей 2. При этом блок гидрораспределителей 2 выполнен в виде трех двухпозиционных четырехлинейных гидрораспределителей 3, 4, 8 с электрическим управлением, причем первый вход гидрораспределителя 3 соединен с напорной линией 9 гидронасоса 1, второй вход гидрораспределителя 3 соединен с первым входом гидрораспределителя 8, второй вход гидрораспределителя 8 соединен с первым входом гидрораспределителя 4, второй вход гидрораспределителя 4 соединен с напорной линией 10 гидронасоса 1, при этом входы каждого из гидрораспределителей 3, 4, 8 попарно соединены между собой внутренними полостями гидрораспределителя, выходы гидрораспределителя 3 соединены с полостями первого гидроцилиндра 6, выходы гидрораспределителя 8 - с полостями гидродвигателя 5, выходы гидрораспределителя 4 - с полостями второго гидроцилиндра 7, при этом напорные линии гидродвигателя 5 и обоих гидроцилиндров 6, 7 заперты внутренними полостями гидрораспределителей 3,4, 8.
Кроме того, привод содержит логическое устройство 11, состоящее, например, из трех двухвходовых логических элементов И 12, 13, 14 и двух логических элементов НЕ 15, 16. При этом первые входы логических элементов 12, 13 и вход логического элемента 16 соединены с командой «Первый гидроцилиндр», вторые входы логических элементов 13, 14 и вход логического элемента 15 соединены с командой «Второй гидроцилиндр», выход логического элемента 15 соединен со вторым входом логического элемента 12, выход логического элемента 16 - с первым входом логического элемента 14, выход логического элемента 12 соединен с входом управления гидрораспределителя 3, выход логического элемента 13 - со входом управления гидрораспределителя 8, выход логического элемента 14 - со входом управления гидрораспределителя 4.
Работа привода происходит следующим образом.
При отсутствии на входах логического устройства 11 команд «Первый гидроцилиндр» и «Второй гидроцилиндр» сигналы управления на выходах логического устройства 11 отсутствуют. При этом гидрораспределители 3, 4, 8 находятся в состоянии, изображенном на чертеже, то есть напорные линии 9, 10 гидронасоса 1 через последовательно соединенные входы гидрораспределителей 3, 4, 8, попарно соединенные внутренними полостями гидрораспределителей, соединены между собой, что обеспечивает разгрузку гидронасоса 1 при отсутствии команд. При этом напорные линии (полости) гидроцилиндров 6, 7 и гидродвигателя 5 заперты внутренними полостями гидрораспределителей 3, 4, 8, что обеспечивает удержание соответствующих установок в определенном положении.
При подаче команды, например, «Первый гидроцилиндр», на выходе логического элемента 12 появляется сигнал, поступающий на управляющий вход гидрораспределителя 3. При этом гидрораспределитель 3 устанавливается в состояние, когда напорные линии 9, 10 гидронасоса 1 соединяются через гидрораспределитель 3 с полостями левого гидроцилиндра 6. При поступлении сигнала управления на вход гидронасоса 1 поток рабочей жидкости с него через напорные линии 9, 10 и гидрораспределитель 3 поступает в левый гидроцилиндр 6, который перемещает первый блок направляющих с ракетами. При подаче команды «Второй гидроцилиндр» сигнал появится на выходе логического элемента 14.
При этом включится в работу гидрораспределитель 4 и соединит напорные линии 9, 10 гидронасоса 1 с полостями правого гидроцилиндра 7.
При одновременной подаче команд «Первый гидроцилиндр» и «Второй гидроцилиндр» сигнал управления появится на выходе логического элемента 13. При этом в работу включится гидрораспределитель 8, который соединит напорные линии 9, 10 гидронасоса 1 с гидродвигателем 5, обеспечивающим движение установок с пушками.
Таким образом, предлагаемое техническое решение позволяет повысить эксплуатационную надежность и расширить функциональные возможности привода.
Предлагаемое техническое решение проверено экспериментально и введено в конструкторскую документацию одного из изделий, разрабатываемых ФГУП «ВНИИ «Сигнал».
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2688783C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ГИДРОСИСТЕМА | 2010 |
|
RU2446321C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2017 |
|
RU2646169C1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2008 |
|
RU2372531C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| СИСТЕМА ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ ЗЕНИТНОГО ВООРУЖЕНИЯ | 2004 |
|
RU2258886C1 |
Привод может быть использован в приводах наведения зенитных ракетно-пушечных комплексов. В электрогидравлическом приводе (ЭГП) блок гидрораспределителей выполнен в виде трех двухпозиционных гидрораспределителей с электрическим управлением, через которые поток рабочей жидкости от гидронасоса поочередно поступает к исполнительным элементам ЭГП при подаче команды управления на соответствующий гидрораспределитель. При этом в отсутствие команд управления выходы гидронасоса соединены между собой через последовательно соединенные входы трех гидрораспределителей, а рабочие полости исполнительных элементов ЭГП заперты внутренними полостями гидрораспределителей. Управление гидрораспределителями осуществляется с помощью логического устройства, позволяющего из двух подаваемых на его вход команд формировать три команды, позволяющие поочередно управлять тремя гидрораспределителями. Такое выполнение блока гидрораспределителей и наличие логического устройства позволяет разгрузить гидронасос при отсутствии команд управления и обеспечить удержание нагрузки на любом фиксированном угле, то есть получить указанный выше технический результат. Технический результат - повышение эксплуатационной надежности и расширение функциональных возможностей привода. 1 з.п. ф-лы, 1 ил.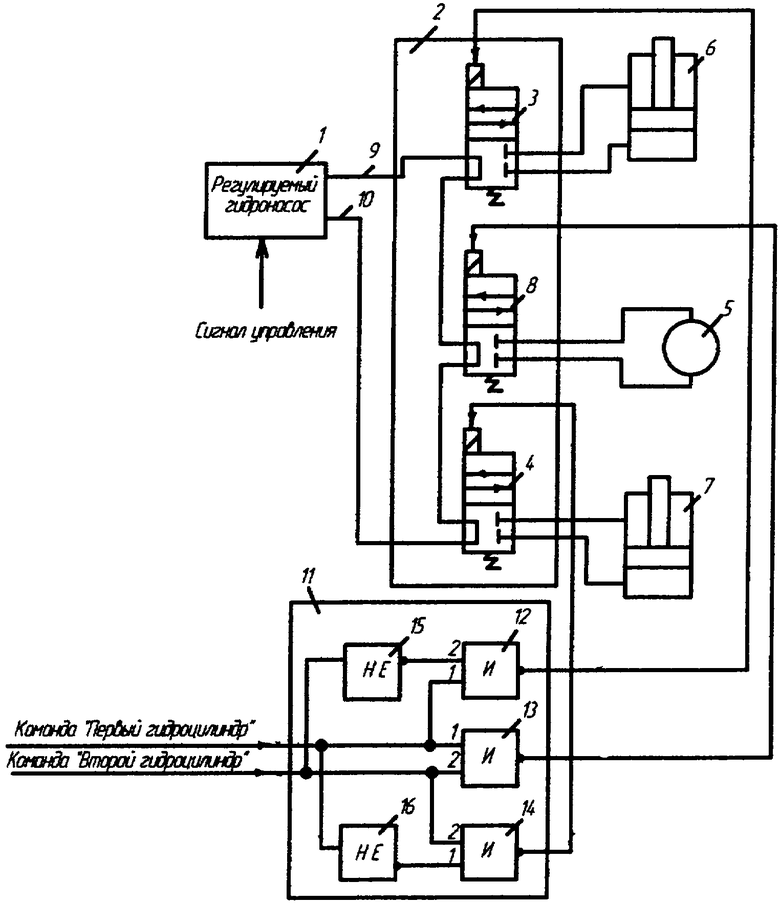
| СИСТЕМА ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ ЗЕНИТНОГО ВООРУЖЕНИЯ | 2004 |
|
RU2258886C1 |
| RU 2002103438 A1, 27.08.2003 | |||
| Гидропривод | 1979 |
|
SU830019A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ПРИ ТРАЕКТОРНЫХ ИЗМЕРЕНИЯХ МЕЖПЛАНЕТНЫХ КОСМИЧЕСКИХ АППАРАТОВ ЗА СЧЕТ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛОВ В ИОНОСФЕРЕ ЗЕМЛИ И МЕЖПЛАНЕТНОЙ ПЛАЗМЕ | 2014 |
|
RU2578003C1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |

