Настоящее изобретение относится к устройству контроля и управления башенным краном, в частности малым краном, с объединением множества функций и адаптированного для радиоуправления.
В области радиоуправляемых механизмов с вариатором скорости для башенных кранов существуют радиоуправляемые системы, состоящие из передающего блока, встроенного в пульт управления, используемый крановщиком, и принимающего блока, расположенного в электрическом щите управления, обычно подключенного к классическому разъему кабельной системы дистанционного управления. Известны также в этой области системы управления безопасностью посредством дублирования идентичных контуров или посредством дублирования на основе контуров, которые могут быть электромеханическими или электронными.
Напротив, в настоящее время не существует устройств, объединяющих в различных комбинациях в одном и том же блоке функции дистанционного управления и функции контроля управлением, осуществляемого по сей день посредством ретрансляции, также как и некоторых частных функций, таких как команды монтажа крана, а именно автоматизированного монтажа; вспомогательные команды при монтаже и работе крана; контроль действия устройств безопасности; безопасность против опрокидывания крана; анемометры.
В частности, вышеупомянутые функции обычно не существуют у малых кранов, которые составляют основную область применения настоящего изобретения, поскольку стоимость отдельных устройств, предназначенных для выполнения этих функций, считается слишком большой по сравнению с общей стоимостью крана.
Настоящее изобретение, следовательно, направлено на приведение стоимости этих устройств, предназначенных для выполнения этих функций, посредством их объединения, до приемлемого для малых кранов уровня, внося в них существенные технологические усовершенствования, придавая им техничность, разнообразие функций и безопасность, сравнимую с таковыми более крупных кранов, при приемлемой цене.
Более конкретно, изобретение имеет целью улучшить надежность работы таких кранов, а именно посредством упрощения управляющих контуров, за счет объединения функций только в одном электронном блоке, в частности:
a) обработки аспектов безопасности крана, таких как:
- активное использование сигналов анемометра и кренометра,
- контроль за приводом тормоза под действием устройств безопасности,
- дистанционное управление переводом в положение "флюгер",
- использование потенциометрических датчиков или датчиков напряжений для их постоянного контроля;
b) повышения надежности системы управления, за счет снижения количества составляющих и соединений и персонализации команд, например:
- исключение программируемых автоматов,
- исключение ретрансляции или интерфейсов между системами,
- исключение некоторых кабелей, например кабеля связи между краном и средством дистанционного управления,
- уменьшение числа соединяемых разъемов,
- уменьшение числа датчиков,
- адаптация крана к условиям его эксплуатации, в частности к электрической, климатической и механической окружающей среде;
с) улучшения обслуживаемости крана посредством:
- помощи в управлении, техническом обслуживании, монтаже и эксплуатации,
- адаптации к изменениям окружающей среды или к технологическому прогрессу,
- опроса на расстоянии эксплуатационных событий.
С этой целью объектом изобретения является устройство контроля управлением, которое содержит для совокупности движений крана, таких как подъем, поворот, распределение и перенос, электронный блок контроля и управления, принимающий на своих входах и обрабатывающий сигнал управления, исходящий от блока радиоуправления, также как сигналы, исходящие от датчиков и коммутаторов, и выдающий на своих выходах команды пуска и остановки, контролируя действия вариаторов скорости или других органов привода, связанных с движениями, а также действие устройств безопасности крана.
Электронный блок контроля и управления получает и обрабатывает, в частности, сигналы, исходящие от датчиков положения груза, сигнал, исходящий от датчика записи состояния тормоза, связанного с каждым движением крана, сигнал, исходящий от датчика горизонтальности какой либо части крана, типа кренометра, и сигнал, исходящий от анемометра. Электронный блок контроля и управления может, кроме того, получать и обрабатывать сигналы, исходящие от коммутатора "нормальный ход/подготовительный ход".
То, что касается выходных сигналов, электронный блок контроля и управления выдает, в частности, управляющую команду пуска или остановки вариаторов скорости, команду немедленной остановки, посылаемую тем же вариаторам скорости, и сигнал, направленный общему выключателю.
Согласно одному из предпочтительных вариантов исполнения электронный блок контроля и управления получает и обрабатывает еще и сигналы, связанные с коммутатором "нормальный ход/монтаж", а также сигналы, связанные с конфигурацией крана во время монтажа, и он содержит средство последовательной сортировки команд, получающее эти сигналы и выдающее сигналы управления устройствами, такими как домкраты для складывания раскладывания крана в непрерывной последовательности.
Электронный блок контроля и управления может также выдавать по радио информацию о принятых и обрабатываемых сигналах, информацию, которая передается средствам помощи управлению в форме индикатора, установленного на корпусе блока радиокоманд.
Тот же электронный блок контроля и управления может также выдавать сигнал перевода крана в положение флюгера на основании управляющего сигнала перевода крана в положение флюгера, переданного блоком радиокоманд.
В том, что касается внутренней структуры электронного блока контроля и управления, то он включает, в частном случае исполнения:
- устройство декодирования и устройство кодирования, служащие интерфейсами для двусторонней радиосвязи с блоком радиоуправления,
- контакты коммутаторов "нормальный ход/подготовительный ход" и "нормальный ход/монтаж",
- компаратор, а именно компаратор пороговый умножитель, получающий и обрабатывающий сигналы, исходящие от датчиков положения и грузоподъемности,
- компаратор, а именно компаратор фильтр с фиксированным порогом, получающий и обрабатывающий сигналы, исходящие от датчика горизонтальности,
- компаратор, а именно компаратор фильтр с регулируемыми порогами, получающий и обрабатывающий сигналы, исходящие от датчика скорости ветра,
- контур выдержки времени, получающий сигнал, исходящий от датчика записи состояния тормоза, и имеющий выход, соединенный с общим выключателем,
- вышеупомянутое средство последовательной сортировки команд, выдающее сигналы управления устройствами, такими как домкраты для складывания-раскладывания крана,
- логический контур, выдающий управляющую команду движения или остановки, посылаемую вариатору скорости в зависимости от положения коммутатора "работа/монтаж" и выходных сигналов компараторов, которые получают сигналы датчика горизонтальности и анемометра.
Предпочтительно электронный блок контроля и управления содержит также, по меньшей мере, блок памяти данных и блок памяти программ, которые получают, обрабатывают и хранят сигналы положения, груза, кренометра и анемометра, а также запись состояния тормоза, причем блок или блоки памяти могут быть опрошены с таких терминалов, как терминал оператора или терминал дистанционного управления.
Устройство согласно изобретению может также выполнять действие по ограничению зоны посредством компаратора - порогового умножителя, получающего и обрабатывающего сигналы, исходящие от датчиков положения, и в зависимости от параметров, находящихся в памяти, с выдачей команды вариатору о немедленной остановке.
Наконец, электронный блок может содержать вход для загрузки информации дистанционного управления от терминала дистанционного управления в блок или блоки памяти.
Изобретение, во всяком случае, будет лучше понято из описания, которое следует со ссылками на единственную фигуру, данную в приложении в качестве не ограничивающего примера осуществления устройства контроля управлением для башенных кранов.
Устройство, представленное в виде блок-схемы, содержит, принципиально, электронный блок контроля и управления, целиком обозначенный цифрой 2, работающий на электрических сигналах низкого уровня, в частности, во взаимодействии с блоком 3 радиоуправления и с различными датчиками.
Электронный блок 2 получает на свои входы сигнал-команду 4 от блока 3 радиокоманд и также:
- аналоговые сигналы 5, исходящие от датчиков положения, обозначенных в целом цифрой 6, в частности, от потенциометрических датчиков;
- сигнал 7, исходящий от датчика 8 грузоподъемности, в частности от датчика сопротивления;
- сигнал 9 записи состояния (торможение и расцепление) тормоза 10, исходящий от датчика 11, расположенного, например, около электромеханического тормоза 10 с отключением тока;
- сигнал 13, исходящий от коммутатора 14 "работа/монтаж";
- сигнал 15, исходящий от коммутатора 16 "нормальный ход/подготовительный ход", используемого как при работе, так и при монтаже;
- сигнал 17, исходящий от датчика 18 горизонтальности шасси крана (кренометр);
- сигнал 19, исходящий от анемометра 20;
- сигналы 21, связанные с конфигурацией крана во время монтажа, исходящие, например, от датчиков 23, 24 разгибания мачты крана и положения разгибания стрелы (например, на данный угол, такой как 20°);
- информация 25 о корректировке значений внутренних контуров электронного блока 2, исходящая от терминала 26, дистанционного управления.
Электронный блок 2 выдает на своих выходных каналах следующие различные сигналы:
- управляющую команду 27 пуска или остановки, направляемую вариатору 28 скорости, который управляет электромотором 29, с которым соединен вышеупомянутый тормоз 10;
- команду 30 немедленной остановки, посылаемую вариатору скорости 28;
- сигнал 31, направленный общему выключателю 32;
- управляющие сигналы 33, 34, направляемые электроклапанам 35, 36, которые, в свою очередь, управляют домкратами для складывания-раскладывания стрелы и мачты крана соответственно;
- передаваемую по радио информацию 37 средствам помощи управлению краном, принимающим, в частности, форму индикатора 38, установленного на корпусе блока 3 радиокоманд;
- сигнал 61 перевода крана в положение флюгера;
- другую информацию 39, направляемую устройствам помощи удержания в заданном режиме, помощи при монтаже и помощи в эксплуатации, расположенным около терминала 40 оператора.
Электронный блок 2 обеспечивает обработку сигналов, как для их приема, так и для их передачи и регистрирует также явления, которые могут быть либо циклами работы крана, либо внешними явлениями. С этой целью электронный блок 2 включает, в частности:
- контакты переключателей 41 и 42 соответственно коммутатора 14 "работа/монтаж" и коммутатора 16 "нормальный ход/подготовительный ход";
- устройство 43 декодирования и устройство 44 кодирования, служащие интерфейсами для двусторонней радиосвязи с блоком 3 радиоуправления;
- компаратор - пороговый умножитель 45, получающий сигналы 5 и 7, исходящие соответственно от датчиков 6 положения и датчика 8 грузоподъемности;
- контур 46 выдержки времени, входы которого соединены с компаратором 45 и с датчиком 11 записи состояния тормоза и выход которого соединен с общим выключателем 32;
- компаратор - фильтр 47 с фиксированным порогом, получающий сигнал 17 от кренометра 18;
- компаратор - фильтр 48 с регулируемыми порогами, получающий сигналы 19 от анемометра 20;
- средство 49 последовательной сортировки команд, получающее на своих входах сигналы 21, связанные с конфигурацией крана и подающее со своих выходов сигналы 33, 34 управления электроклапанам 35, 36;
- логический порт "ЕТ" 50 с тремя входами (уточненными ниже), с выхода которого передают команду 27 контролируемого движения или остановки, посылаемую вариатору 28 скорости;
- соединение 51 между двумя контактами переключателей 41 и 42, а также с декодером 43;
- соединение 52 между контактом переключателя 41 и средством 49 последовательной сортировки команд;
- соединение 53 между контактом переключателя 41 и входом порта "ЕТ" 50;
- соединение 54 между компаратором 47 и другим входом порта "ЕТ" 50;
- соединение 55 между компаратором 48 и последним входом порта "ЕТ" 50;
- соединение 56 между компаратором 45 и вариатором 28 скорости для передачи команды 30 о немедленной остановке;
- последнее соединение 57 между контактом переключателя 42 и командой 58 вспомогательного хода, с нажимной кнопкой;
- блок 59 памяти данных;
- блок 60 памяти программ.
Каждое движение крана, такие как подъем, поворот, распределение и перенос, использует часть блока 2 контроля-управления, подобную блоку описанному ранее; детально разобранный здесь пример относится, в частности, к движению подъема.
Работа ранее описанного устройства основывается, как описано далее, на различных функциях, объединенных в этом устройстве.
Команда движения, отдаваемая посредством блока 3 радиоуправления:
Блок 3 радиоуправления выдает радиосигнал 4, который принимается и преобразуется посредством декодера 43 в команду 27 хода, передаваемую через порт "ЕТ" 50 вариатору 28 скорости, который питает мотор 29 и тормоз 10. Мотор 29 приводит в действие соответствующий механизм (например, для движения подъема) и один из датчиков 6 положения, в зависимости от заданного движения, выдает сигнал 5.
Команда остановки движения:
Сигнал 4, выданный блоком 3 радиоуправления, отменен. Следовательно, вариатор скорости 28 не получает больше команды 27 на ход, что приводит к контролируемому прекращению движения, при этом вариатор 28 скорости прекращает питать мотор 29 и тормоз 10, вследствие чего из-за отсутствия тока тормоз блокирует движение.
Действие ограничителя хода или грузоподъемности:
Сигнал 5 или 7, исходящий от датчика 6 положения или от датчика 8 грузоподъемности, поступает на пороговый компаратор - умножитель 45, который вырабатывает, когда порог достигнут, команду 30 немедленной остановки, посылаемую вариатору 28 скорости, и одновременно приводит в действие контур 46 выдержки времени. В результате этого:
- вариатор 28 скорости прекращает питать мотор 29 и тормоз 10;
- датчик 11 выдает сигнал 9 записи состояния тормоза 10;
- обычно этот сигнал 9 останавливает контур 46 выдержки времени до полного истечения регламентированного времени для этого контура 46;
- в отсутствие сигнала 9 и если истекло регламентированное время для контура 46, этот контур 46 выдает сигнал 31, направленный общему выключателю 32, который вызывает вследствие этого полную остановку крана.
Команда вспомогательный ход:
Оператор переключает коммутатор 16 в положение вспомогательного хода, в результате чего становится выполнимой команда 58 вспомогательного хода и блокируется сигнал 4, исходящий из блока 3 радиокоманд. Таким образом, команду 58 вспомогательного хода реализуют воздействием на нажимную кнопку вспомогательного хода. Сигнал, поданный по этой команде 58 вспомогательного хода и переданный посредством порта "ЕТ" 50, вырабатывает команду 27 ход для вариатора 28.
Команды монтажа:
Оператор переключает коммутатор 14 в положение монтажа, в результате чего сигнал 4, исходящий из блока радиокоманд 3, или сигнал, порожденный командой 58 вспомогательного хода, передается в средство 49 последовательной сортировки команд.
Средство 49 последовательной сортировки команд управляет соответственно электроклапанами 35, 36 сгибания и разгибания стрелы и мачты при помощи сигналов 33, 34; это выполняется последовательно в зависимости от сигналов 21, которые представляют положение стрелы или мачты. Складывание и раскладывание осуществляется, таким образом, в непрерывной последовательности.
Установка в положение флюгера:
Нажимая на кнопку на корпусе блока 3 радиокоманд, оператор посылает сигнал особой команды, принимаемой декодером 43, который затем выдает сигнал 61 установки в положение флюгера, вызывающий действие устройства 62 установки крана в положение флюгера.
Действия, управляемые на основе сигналов, исходящих от кренометра и анемометра:
Сигнал 17, исходящий от кренометра 18, поступает в компаратор - фильтр 47 с фиксированным порогом. Сигнал 19, исходящий от анемометра 20, поступает в компаратор - фильтр 48 с переменным порогом. Выходные сигналы от этих двух компараторов 47 и 48 принимаются на соответствующих портах "ЕТ" 50, который подает команду на ход или контролируемый останов, посылаемую вариатору 28 скорости, или задерживает эту команду в случае избыточного наклона крана или слишком сильного ветра.
Действие "ограничение зоны":
Датчики 6 положения выдают сигналы 5, которые поступают в пороговый компаратор-умножитель 45. Этот компаратор 45 выдает, в зависимости от записанных в памяти параметров, команду 30 о немедленной остановке, направляемую вариатору 28.
Функция помощи управлению:
Сигналы 5 и 7, соответственно положения и грузоподъемности, принимаются и обрабатываются кодирующим устройством 44, которое передает информацию 37 по радио к индикатору 38 блока 3 радиоуправления.
Функция помощи в эксплуатации и обслуживании:
Сигналы 5 - положения, 7 - грузоподъемности, 9 -записи состояния тормоза 10 и 19 - анемометра также принимаются, обрабатываются и записываются в блоке 59 памяти данных и в блоке 60 памяти программ, которые могут быть опрошены через терминал 40 оператора или через терминал 26 дистанционного управления.
Корректировка программ:
Сигнал 25, исходящий из терминала 26 дистанционного управления позволяет корректировать блок 59 памяти данных и блок 60 памяти программ.
Само собой разумеется, что изобретение не ограничивается единственной формой изготовления этого устройства контроля управлением для башенного крана, которое описано выше в качестве примера; наоборот, оно охватывает все варианты исполнения и применения, сохраняющие тот же принцип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА С ТРАНСМИССИЕЙ ВАРИАТОРНОГО ТИПА | 2002 |
|
RU2231459C1 |
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| СПОСОБ КОНТРОЛЯ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2264973C2 |
| ГРУППОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2331131C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И КОНТРОЛЯ ПРИБОРОВ БЕЗОПАСНОСТИ КРАНОВ | 1993 |
|
RU2070161C1 |
| СИСТЕМА ЭЛЕКТРООБОРУДОВАНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2014 |
|
RU2550876C1 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2328443C1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
Изобретение относится к устройству контроля и управления башенными кранами, в частности малыми кранами, с объединением множества функций и адаптированного для радиоуправления. Его использование позволяет получить технический результат в виде повышения надежности работы кранов и упрощения управляющих контуров. Устройство содержит электронный блок контроля и управления совокупностью движений крана, таких как подъем, поворот, распределение и перенос, блок радиоуправления, датчики, коммутаторы, вариаторы скорости, органы привода, связанные с движениями крана, и средства безопасности крана, при этом электронный блок выполнен с возможностью приема на своих входах сигнала блока радиоуправления, сигналов датчиков и сигналов коммутаторов, обработки этих сигналов и выдачи на своих выходах команд пуска и остановки с обеспечением контроля действия вариаторов скорости или органов привода, связанных с движениями крана, а также средств безопасности крана. 10 з.п. ф-лы, 1 ил.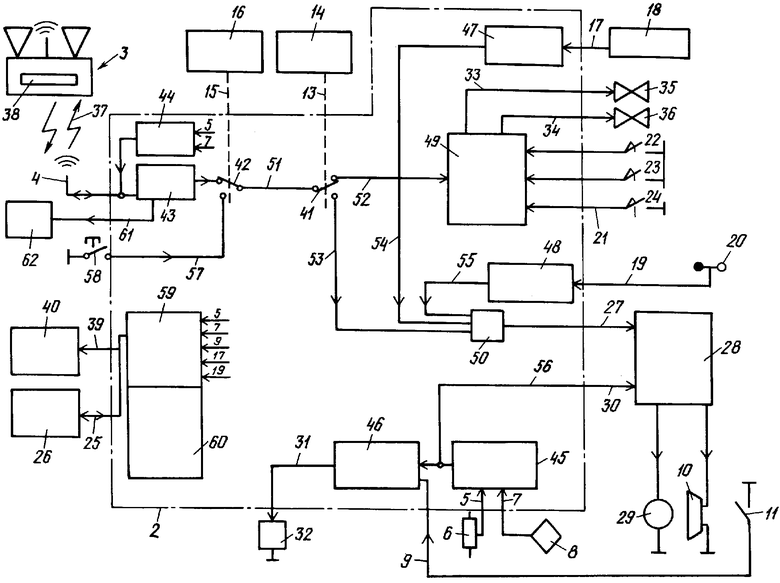
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

