20
Изобретение отлосится к электро- технике, а именно к области унравле- ния механизмами, трогание и стоноре- ние которых должны производиться нлавно в условиях изменения активной статической нагрузки в широких нре- делах,.такими как шахтные нодъемные машины, маятниковые пассажирские канатные дороги, некоторые тины нодъ- емных кранов.
Цель изобретения - повышение нлав- ности и точности управления подъемной мап1иной.
На чертеже приведена функциональ- ная схема электропривода. .
Электропривод содержит электродвигатель постоянного тока, якорь 1 которого подключен к нереверсивному вентильному преобразователю 2, в ка- иал управлепия которого включены по- следоцателыю соединенные задатчик 3 скорости, функциональный преобразователь 4, задатчик..5 интенсивности, регулятор 6 скорости с первым управ- ключом 7 п цетн- обратной свя-. ЗИ; Первый сумматор 8, выпрямитель 9, второй управляемый ключ i О и регулятор 1 тока якоря, при этом выход - задатчика 3 скорости подсоединен через нелинейный блок 12 к регулятору б скорости, а выход 5 скорення задатчика 5 интеисивности -.к второму входу первого сумматора 8, обмотка 13 возбулэдеНия электродвигателя под- ключена к реверсивному вентильному преобразователю l-i, к входу которого подсоединен через регулятор 15 возбуждения выход первого сумматора 8, соединенные с вxoдa ш соответствую- щих регуляторов датчики 16-18 соответственно скорости, тока якоря и- тока возизокдения, а также, первый логический элемент ИЛИ 19, компараторы 20-22, первый элемент 23 выдерж- ки времени, инвертор 24 и блок 25 определения режима, подключенный входа№1 к выходу сумматора 8 и датчику 18 тока возбулсдения, а выходом - к утгравляющему входу управляемого хслюча Ю. Кроме того, в электропривод введены последовательно соединенные и охваченные обратной связью блоки 26 и 27 памяти, датчик 28 загрузки- разгрузки подъемных сосудов, управ- ляемые ключи-29 и 30, логический элемент И 31, второй элемент 32 выдержки времени и второй логический злемент НШ 33, при этом вход первого блока 26 памяти подключен к выходу регулятора 6 скорости, выход второго - к третьему входу сумматора 8, четвертый вход которого соединен с выходом да-тчика 28 . загрузки-разгруки подъемных сосудов, выход задатчи- KfL 3 скорости через комнаратор 20 подключен к одному из входов первого логического элемента ИЛИ 19, к второму входу которого через второй компаратор 21 подключен выход датчика 16 Скорости, а выход первого логичес- элемента ИЛИ 19 соединен непосредственно с управляющими входами третьего 29, включенного в цепь обратной связи регулятора 15 возбуждения, и четвертого 30, включенного в цепь обратной связн регулятора 11 тока якоря, управляемых ключей, а также через первый элемент 23 выдержхси времени с управляющим входом первого управляемого ключа 7 и с управляющим входом второго блока 27 памяти и через логический элеме гг И 31 и второй элемент 32 выдержки времени с управляющим входом первого блока 26 памяти, вход и выход задатчика 5 интенсивности через последовательно включенные второй.сy Jмaтo,p 34, третий компаратор 22, второй логический элемент ИЛИ 33 и инвертор 24 подсоединены к второму входу логического элемента И 31, а другой вход второго логического элемента ИЛИ подкл очен к выходу датчика 35 состояния механического тормоза.
Электропривод работает следующим образом.
Во время выполнения ремонтных работ загрузка-разгрузка подъемных сосудов горной массой не производится, т.е. если осущесивлена остановка подъемной ма1иины, то .в момент начала последующего движения статическая нагрузка сохраняется такой же, какой она была в момент окончания движения Поэтому в процессе движения осуществляется измерение статической нагрузки, а во время стоянки пропорциональный ей сигнал запоминается. При последующем трогании матины под .действием этого сигнала на валу электродвигателя создается компенсирующий момент, равный по величине и противоположный по знаку статическому момен- ту. В этих условиях трогание машины может осуидествляться плавно и с выходом на достаточно малую установив515
шугося скорость. Если подъемная установка работает в режиме вьщачи груза то загрузка-разгрузка подъемньпс сосудов горной массой производится, но только по достижении ими фиксированных (обычно крайних положений. В этом случае блок датчиков контроля загрузки и разг рузки подъемных сосудов вьщает информацию о заполнении сосудов горной.массой или освобождении от нее), которая также может быть использована для создания на валу электродвигателя момента, компен- сирзтощего вызванное загрузкой-разгрузкой изменение статического момента. Хотя известные конструкции блока датчиков загрузки и разгрузки подъемных сосудов выдают эту информацию с Невысокой точностью, но она вполне обеспечивает правильный выбор режима работы электропривода двигательный или тормозной ) в момент начала движения, что оказывается достаточным для трогания машины с такой плавностью, которая вполне приемлема для режимов подъема-спуска груза и перегона порожних сосудов. Осуществляется это так,
В исходном состоянии машина заторможена механическим тормозом, управляемые ключи 7,29 и 30 замкнуты и токи якоря и возбуждения равны нулю. На выходе блока 27 памяти и на выходе датчика. 29 загрузки-разгрузки имеюся сигналы, алгебраическая сумма которых на выходе сумматора 8 пропоциональна статической нагрузке. Если подается команда на начало движения, то задатчик 3 скорости выдает сигнал, который через компаратор 20 и .логический элемент ИЛИ 19 размыкает управляемые ключи 29 и 30 и дополнительно через элемент 23 выдержки времени обеспечивает выдержку времени порядка О, с только при снятии сигнала с его входа размыкает ключ 7, Кроме того, сигнал с выхода элемента 23 выдержки времени поступает на управляющий вход блока 27 памяти, переводя его из пропорционального режима работы в режим памяти (на чертеже сигналы, постзшающие на упраляющие входы блоков 26 и 27 памяти, показаны воздействующими на встроенные в ЭТИ1. блоки ключи; замкнутое состояние ключей соответствует работе блоков в пропорциональном режиме с единичным коэффициентом передачи.
0
5
37
разомкнутое - в режиме памяти; при этом управляющий сигнал ключа показан действующим на его замыкание, если при подаче сигнала ключ замыкается, и, наоборот, действующим на его размыкание, если при подаче сигнала ключ размыкаетя), Вследствие размыкания ключей 29 и 30 и, следовательно, снятия гашения регуляторов 11 и 15 под действием выходного сигнала сумматора 8 на валу электродвигателя создается момент, уравновешивающий статическую нагрузку. До начала движения независимо от величины сигнала на выходе задатчит а 3 скорости выходные сигналь задатчика 5 интенсивности равны нулю. Поэтому для приведения машины в движение относительно Небольшая часть выходного сигнала задатчика 3 скорости, которая принимается из условия получения скорости порядка 0,1-0,2 м/с, подается через Нелинейный блок 12 в регулятор б скорости, минуя задатчик 5 интенсивности. Одновременно производится и растормаживание машины механическим тормозом, которое в зависимости от принятой логики работы начинается либо Б момент подачи, команды на начало движения, либо по достижении токами якоря и возбуждения заданных .- значений (управление -тормозом выполнено по одной из известных схем, которая . на чертеже не приведена), В момент фиксирования начала движения задатчик 5 интенсивности вводится в работу, осуг1ествляя программирование процессов изменения скорости с ограничением ускорения и рывка, С его выхода ускорения сигнал заданного ускорения подается через сумматор 8 на входы контуров регулирования тока якоря и возб уждения и выбираете из условия компенсации динамической составляющей тока якоря. Поэтому электропривод отрабатывает сигнал заданной скорости практически без искажений и запаздываний, а выходной сигнал регулятора 6 скорости пропорционален статической нагрузке не только во время установившегося движения, но с определенной степенью точности и в период разгона и замедления,
Блок 25 определения режима удерживает своим выходным сигналом управляемый ключ 10 в замкнутом состоянии, если полярности выходных сигналов сумматора В и датчика 18 тока возбуж0
5
0
5
0
5
дения совпадают. Если в процессе движения полярность выходного сигнал сумматора 8 меняется и тем самым предписывается переход преобразователя 2 из выпрямительного режима в ин- йерторный или наоборот, то ключ 10 размыкается и под действием выходного сигнала датчика 17 ток якоря 1 электродвигателя обращается в нуль. Когда изменится направление тока в обмотке 13 возбуждения, ключ 10 внов замыкается. Благодаря этому улучшается качество регулирования скорости. Когда задатчик S интенсивности отработает поданный на его вход сигнал, а машина будет полностью растоможена, сигналы на выходе сумматора 34 и датчика 35 состояния механического тормоуа обращаются в нуль (в качестве датчика 35 может быть применен, напртшр, концевой выключатель, срабатывающий при перемещении исполнительного органа тормоза в положение полного растормаживания). В результате обращается в нуль выходной сигнал элемента ИЛИ 33 и появляется сигнал на выходе инвертора 24. Так как сигнал на выходе, логического элемента ИЛИ 19 уже имеется, то сигналы подаются на оба входа логического элемента И 31, поэтому его выходной сигнал через элемент 32 выдержки времени (обеспечивает выдержку времени порядка 0,5 с только при подаче сигнала на его вход) поступает на.управляющий вход блока 26 памяти, переводя его из режима памяти в пропорциональный режим работы. К этому времени подъемная машина уже достигает установившейся скорости, поэтому формируемая сумматором 8 алгебраическая сумма выходньп-: сигна- лов регулятора 6 скорости, блока 27 памяти и датчика 28 загрузки-разгрузки пропорциональна статической нагруке. В процессе дальнейшего движения с установиврл1мся управляющим воздействием регулятор б скорости компенсирует изменение статической нагрузки, а работающий з пропорциональном режиме блок 26 памяти суммирует выходные сигналы регулятора 6 и блока 27 памяти.
Остановка машины.осуществляется путем снятия сигнала задатчика 3 скорости. Если при этом движение производится с незначительной скоростью ниже порога срабатывания компаратора
21, то в момент снятия вькодного сигнала задатчика 3 скорости обращается в нуль выходной сигнал элемента ИЛИ 19 и одновременно происходит гашение регуляторов Пи 15 с помощью ключей 29 и 30, перевод блока 26 в режим памяти и наложение механического тормоза, а с выдержкой времени, опреде0 ляемой элементом 23 - гашение регулятора 6 и перевод блока 27 памяти в пропорциональный режим. Поэтому выходной сигнал блока 26 памяти записывается и на выходе блока 27, а сум5 марный сигнал блока 27 и датчика 28 оказы вается пропорциональным с высокой точностью статической нагрузке, которая имела место н момент подачи команды.на остановку. Такой процесс
0 запоминания статической нагрз зки имеет место, как правило, во время исполь.зования подъемпой машины для выполнения ремонтных работ. При этом компенсация статической нагрузки при
5 следующем включении машины производится с высокой точностью и:, как следствие, обеспечивается возможность перемещения подъемных сосудов плавно и на небольшие расстояния.
0 Если в момент подачи команды на остановку машина двигалась со значительной скоростью, то задатчиком 5 интенсивности программируется ее уменьшение до нуля. Когда скорость уменьшится до величины порядка .0,5 - 0,8 м/с, автоматически подается команда на наложение механического тормоза. В этом случае блок 26 памяти также переводится в режим памяти в
Q момент снятия выходного сигнала задатчика 3 скорости (вследствие появления сигнала на выходе сумматора 34). Когда скорость станет ниже порога срабатывания компаратора 21., аналогичс но описанному происходит гашение регуляторов 11, 15 и 6 путем замыкания ключей 30, 29 и 7 соответственно и перевод в пропорциональный режим блока 27 памяти. Поскольку и в этом случае суммарный сигнал блока 27 и датчика 28 пропорционален статической нагрузке, которая имела место в момент подачи комаьщы на остановку, то возможное в процессе замедления изменение статической нагрузки оказывается неучтенньм и при следздощем включении машины компенсация статической нагрузки будет неполной. Однако это несллцественно, так как подъ5
0 .
5
915
емная машина в ходе ремонтных работ всегда эксплуатируется на малых скоростях, а другие режимы ее работы не нуждаются в комненсадии статичес- .кой нагрузки с высокой точностью.
Если во время стоянки машины произойдет изменение статической нагрузки вследствие загрузки-разгрузки подъемных сосудов, то соответствую- щим образом изменяется выходной сигнал датчика 28 и происшедшие изменения статической нагрузки учитываются с точностью, определяемой разрешающей способностью датчика 28. Если во время движения машины машинист произведет ее подтормаживание механическим тормозом, то еще до начала торможения на выходе датчика 35 появляется сигнал, который вызывает мгно венный перевод блока 26 в режим памяти. После снятия этого возмущения блок 26 памяти возвращается в прпорциональный режим с выдержкой времени, определяемой элементом 32 и Необходимой для окончания порожденного возмущением переходного процесса Аналогично происходит в случае изменения машинистом уставки скорости. Кроме того, согласно изложенному логика управления блоками 26 и 27 памяти исключает одновременную работу блоков.26 и 27 в пропорциональном режиме, так как в этом случае происходит искажение информации за счет действия охватывающей блоки положительной обратной связи, работу блока 26 в пропорциональном режиме при погашенном регуляторе 6 скорости так как в этом случае записанная на выходе блока 26 информация частично -утрачивается, перевод блока 27 в ;пропорциональный режим при., непогашенных регуляторах 11 и 15, так как в этом случае в процессе движения в систему авторегулирования может быть подано ступенчатое приращение выходного сигнала блока 27, что нежелательно . При выполнении ремонтных работ в стволе предлагаемая схема компенсации статической нагрузки функционирует с высокой точностью благодаря использованию в ней в качестве первичной информации выходного сигнала регулятора 6 скорости, который автоматически компенсирует нестабильность параметров системы авторегулирования скорости, а также их изменение при перенастройках.
5
1837
Q15 20 25 30 , 0 .
50
55
10
Перемещению подъемных сосудов на небольшие расстояния без перерегулирования способствует также примене- . ние нелинейного блока 12 и функционального преобразователя 4, которые обеспечивают возможность дозирования с высокой точностью малых задающих сигналов на входе регулятора 6 скорости.
Таким образом, предлагаемый электропривод обеспечивает простыми средствами повышение плавности и точности управления подъемной машиной. Формула изобретения
Электропривод подъемной машины, содержащий электродвигатель постоянного тока, якорь которого подключен к нереверсивному вентильному преобразователю, в канал управления которого включены последовательно соединенные задатчик скорости, функциональный преобразователь, задатчик интенсивности, регулятор скорости с п,ервым управляемым ключом в цепи, обратной связи, первый сумматор, выпрямитель, второй управляемый ключ и регулятор тока якоря, при этом выход задатчика скорости через нелинейный блок типа Зона нечувствительности подсоединен к регулятору скорости, а выход ускорения задатчика интенсивности подсоединен к второмjr входу первого сумматора, обмотка возбуждения электродвигателя подключена к реверсивному вентильному преобразователю, к входу которого подсоедиг нен через регулятор возбуждения выход Первого сумматора, соединенные с входами соответствующих регуляторов датчики скорости, тока якоря и тока возбуждения, а также первый логический элемент 1ШИ, три компаратора, первый элемент выдержки ни, инвертор и блок определения режима, подключенный вxoдa ш к выходу первого сумматора и датчику тока возбуждения, а выходом - к управляющему входу второго управляемого ключа, отличающийся тем, что, с целью повышения плавности и точности управления машиной, в него введены два последовательно соединенных и охваченных обратной связью блокг памяти, датчик загрузки-разгрузки подъемных сосудов, третий и четвертый управляемые ключи, логический элемент И, второй элемент вьщержки во мени и второй логический элемент ИЛИ при Э.ТОМ вход первого блока памяти подключен к выходу регулятора скорости, выход второго - к третьему входу первого сумматора, четвертый вход которого соединен с выходом датчика загрузки-разгрузки подъемных сосу- д ов, выход, задатчика скорости через первый компаратор подключен к одному из входов.первого логического элемента ИЛИ, к второму входу которого через второй компаратор подключен выход датчика скорости, а выход первого логического элемента 1-ШИ соединен непосредственно с уПравляю- ищми входами третьего, включенного в цепь обратной связи регулятора воз- буждения, и четвертого, включенного
в цепь обратной связи регулятора тока якоря, управляемых ключей, а также через первый злемент выдержки времени с управляющим входом первого управляемого ключа и с управляющим входом второго блока памяти и через логический элемент И и второй элемент выдержки времени с управляющим
входом первого блока памяти, вход и выход задатчика интенсивности че-. рез последовательно включенные второй сумматор, третий компаратор, второй логический элемент ИЛИ и инвертор подсоединены к второму входу логического элемента И, а другой вход второго логического элемента РШИ подключен к выходу датчика состояния механического тормоза.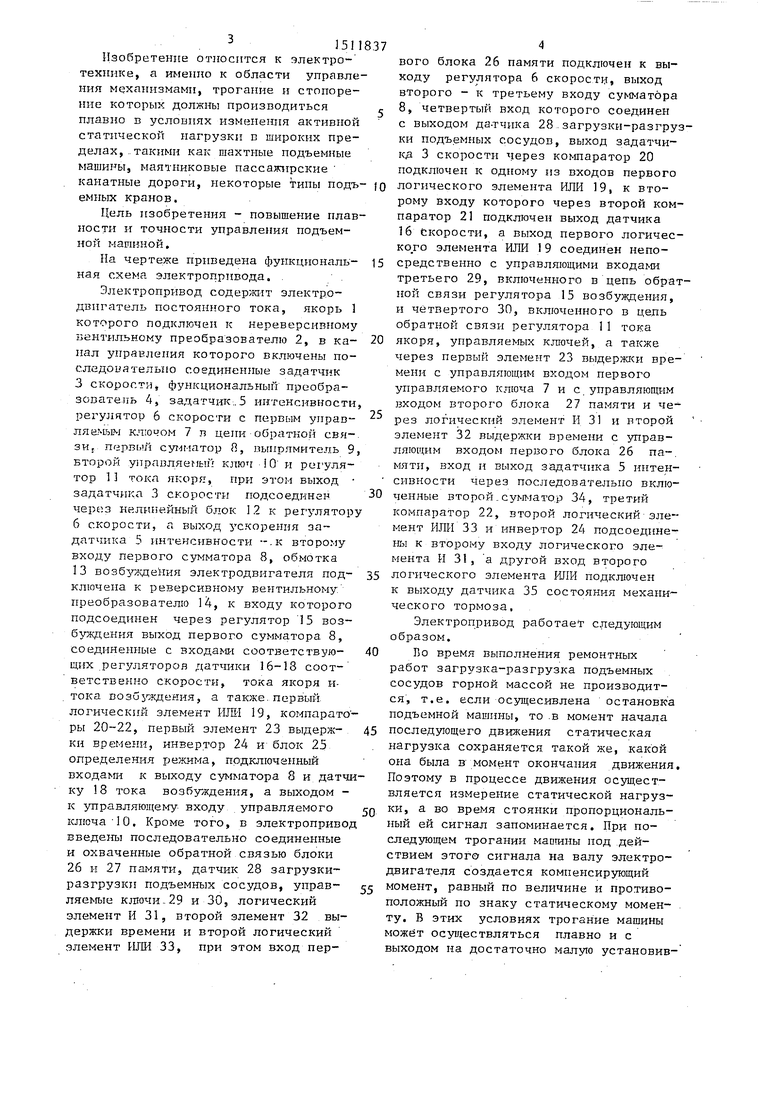
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для пуска подъемной машины | 1990 |
|
SU1778058A1 |
| Устройство для управления подъемной машиной | 1982 |
|
SU1154194A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
Изобретение относится к электротехнике и может найти применение в шахтных подъемных установках. Целью изобретения является повышение плавности и точности управления подъемной машиной. Устройство содержит электродвигатель постоянного тока, управление которым осуществляется по цепи якоря и по цепи возбуждения. Регулятор 6 скорости, регулятор 11 тока якоря и регулятор 15 возбуждения выполнены с управляемыми ключами в цепях их обратных связей. Кроме того, в устройство введены блоки 26,27 памяти, подключенные к выходу регулятора 6 скорости, датчик 28 загрузки-разгрузки, логический элемент ИЛИ, входы которого через компараторы 20 и 21 соединены с задатчиком 3 и датчиком 16 скорости, а его выходной сигнал управляет ключами в цепях обратных связей упомянутых регуляторов, а также блоками памяти. При управлении приводом учитывается состояние тормоза, величина статической нагрузки, состояние скипа. Изобретение позволяет обеспечить плавное трогание машины и перемещение подъемных сосудов без рывков и обратного хода. 1 ил.
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
