Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах безопасности и контроля грузоподъемных кранов.
Известен способ контроля и регистрации работы грузоподъемного крана, включающий измерение его рабочих параметров, преобразование измеренных величин в цифровые сигналы, последующую запись на кране этих сигналов и времени их появления в долговременную энергонезависимую память для хранения с возможностью считывания в случае необходимости, а также их дистанционную передачу по радиоканалу на терминал, расположенный вне крана, запись принятых терминалом сигналов для хранения в дополнительную энергонезависимую память с возможностью считывания в случае необходимости, и обработку этих сигналов для выявления наличия нарушений правил эксплуатации крана. Данный способ реализован в системе контроля и регистрации работы грузоподъемного крана, содержащей цифровой блок обработки данных в виде микроконтроллера, к которому подключены пульт управления, датчики рабочих параметров крана, блок индикации, блок памяти и приемопередающий радиомодуль, и расположенный вне крана терминал, включающий микроконтроллер, к которому подключены пульт управления, блок индикации, блок памяти и приемопередающий радиомодуль. Терминал связан линией двухсторонней беспроводной связи с цифровым блоком обработки данных и предназначен для приема информации о текущих параметрах крана и записи этих параметров в долговременную энергонезависимую память (регистратор параметров крана) с возможностью считывания информации в случае необходимости для выявления наличия нарушений правил эксплуатации крана и передачи на кран предупреждающих сигналов крановщику и управляющих сигналов, уменьшающих предельно допустимые значения рабочих параметров крана, или отключающих исполнительные механизмы крана (см. патент РФ №2269483, В66С 13/18, 20.11.2004). Известный способ не обеспечивает требуемую надежность (достоверность) контроля и регистрации рабочих параметров крана из-за использования проводных линий связи между датчиками, расположенными на подвижных элементах крана и микропроцессором. Недостатком системы, реализующей данный способ, является также сложность ее монтажа на кране с использованием проводных линий связи между датчиками, расположенными на подвижных элементах крана и микропроцессором, а также значительная трудоемкость настройки системы при больших размерах (высоте) крана.
Известен также способ контроля и регистрации работы грузоподъемного крана, включающий передачу команд управления с расположенного вне крана пульта дистанционного управления с использованием линии двухсторонней беспроводной связи, измерение рабочих параметров крана, преобразование измеренных величин в цифровые сигналы, определение допустимой нагрузки и предельных положений оборудования крана и отключения его механизмов, когда фактическая нагрузка на кран превысит допустимое значение или при достижении предельных положений оборудования, запись на кране управляющих и информационных сигналов и времени их появления в долговременную энергонезависимую память с возможностью считывания в случае необходимости, а также их дистанционную передачу по проводной линии связи на расположенную вне крана станцию диспетчерского контроля, регистрации и хранения данных о работе крана. Данный способ, взятый в качестве прототипа, реализован в системе управления, контроля и регистрации работы грузоподъемного крана, содержащей цифровой блок обработки данных (электронный блок контроля и управления), включающий регистратор данных, датчики параметров крана, приемопередающий радиомодуль, пульт дистанционного управления краном, включающий клавиатуру и приемопередающий модуль, и цифровую станцию диспетчерского контроля, регистрации и хранения данных о работе крана (терминал оператора или терминал дистанционного управления), подключенную к цифровому блоку обработки данных (см. патент РФ №2259579, G05B 19/05, 27.08.2005). Известный способ не обеспечивает требуемую надежность (достоверность) контроля и регистрации рабочих параметров крана из-за сложности передачи информации из расположенного на кране электронного блока управления и контроля на терминал оператора или терминал дистанционного управления, расположенный на относительно большом расстоянии от крана, с использованием проводной линии связи. Недостатком системы, реализующей данный способ, является также сложность ее монтажа на кране с использованием проводных линий связи между датчиками, расположенными на подвижных элементах крана и микропроцессором, а также значительная трудоемкость настройки системы при больших размерах (высоте) крана.
Задачей, на решение которой направлено изобретение, является разработка способа контроля и регистрации работы грузоподъемного крана и системы для его осуществления, которые обеспечивали бы повышенную надежность (достоверность) контроля и регистрации рабочих параметров крана. Другой задачей настоящего изобретения является сокращение количества проводных линий связи, обслуживающих систему контроля и регистрации работы крана, и возможность дистанционной настройки (юстировки) данной системы оператором, находящимся вне крана.
Поставленная техническая задача достигается тем, что в известном способе контроля и регистрации работы грузоподъемного крана, включающем включающий передачу команд управления с расположенного вне крана пульта дистанционного управления с использованием линии двухсторонней беспроводной связи, измерение рабочих параметров крана, преобразование измеренных величин в цифровые сигналы, определение допустимой нагрузки и предельных положений оборудования крана и отключения его механизмов, когда фактическая нагрузка на кран превысит допустимое значение или при достижении предельных положений оборудования, запись на кране управляющих и информационных сигналов и времени их появления в долговременную энергонезависимую память с возможностью считывания в случае необходимости, а также их дистанционную передачу на расположенную вне крана станцию диспетчерского контроля, регистрации и хранения данных о работе крана, согласно изобретению дополнительно по команде с пульта дистанционного управления передают на него записанные на кране информационные и управляющие сигналы и записывают эти сигналы в энергонезависимую память пульта дистанционного управления с возможностью считывания в случае необходимости путем передачи сигналов на станцию диспетчерского контроля, регистрации и хранения данных о работе крана, при этом для передачи всех сигналов используют двухсторонние беспроводные линии связи.
Применительно к системе, реализующей предлагаемый способ, поставленная техническая задача достигается тем, что в системе управления грузоподъемным краном с контролем и регистрацией его работы, содержащей цифровой блок обработки данных, к которому подключены датчики параметров крана, регистратор параметров крана и приемопередающий радиомодуль, пульт дистанционного управления, включающий клавиатуру и приемопередающий радиомодуль, и цифровую станцию диспетчерского контроля, регистрации и хранения данных о работе крана, согласно изобретению пульт дистанционного управления связан линиями двухсторонней беспроводной связи с датчиками параметров крана и цифровой станцией диспетчерского контроля регистрации и хранения данных и выполнен с возможностью выдачи дополнительных управляющих команд на датчики параметров крана для юстировки системы и для приема информации о текущих параметрах крана и ее записи, а также с возможностью передачи принятой информации на цифровую станцию диспетчерского контроля, регистрации и хранения данных о работе крана, при этом датчики параметров крана и цифровая станция диспетчерского контроля регистрации и хранения данных о работе крана снабжены дополнительными приемопередающими радиомодулями, а все приемопередающие радиомодули системы связаны между собой радиосвязью, образуя беспроводную линию последовательного интерфейса.
Кроме того, пульт дистанционного управления дополнительно снабжен блоком идентификации, блоком считывания информации, блоком настройки системы и блоком записи информации, при этом выход блока управления подключен через блок идентификации к входам блоков считывания, настройки системы и записи информации, выходы блоков настройки системы и блока записи информации подключены к входам приемопередающего радиомодуля пульта дистанционного управления, а блок считывания информации подключен к указанному радиомодулю с помощью двухсторонней линии связи.
Такое выполнение системы контроля и регистрации работы грузоподъемного крана обеспечивает возможность:
дистанционной настройки (юстировки) данной системы и отдельных ее элементов оператором, находящимся вне крана;
оперативного получения необходимой информации об исполнении команд, введенных с клавиатуры пульта дистанционного управления;
дополнительной (контрольной) регистрации данных о работе крана на пульте дистанционного управления;
дополнительной передачи (при необходимости) данных о работе крана с пульта дистанционного управления на станцию диспетчерского контроля, регистрации и хранения данных для того, чтобы проконтролировать работу оборудования крана.
Технический результат от использования изобретения - повышение надежности (достоверности) контроля и регистрации рабочих параметров грузоподъемного крана.
На чертеже представлена функциональная схема системы контроля и регистрации работы грузоподъемного крана, реализующей предлагаемый способ.
Система содержит группу датчиков параметров крана, устанавливаемых на его оборудовании (на чертеже, в частности, показаны четыре датчика 1-4), и устанавливаемый в кабине крана цифровой блок 5 обработки данных, содержащий в своем составе регистратор 6 параметров крана. Датчики 1-4 и цифровой блок 5 снабжены приемопередающими радиомодулями 7-11 и обеспечивают функционирование системы безопасности, защищая кран от перегрузки и недопустимых перемещений его оборудования. Число датчиков зависит от состава оборудования крана.
Для контроля за состоянием и работой крана, регистрации оперативной информации и долговременного хранения его эксплуатационных характеристик система включает в себя цифровую станцию 12 диспетчерского контроля, регистрации и хранения данных, располагаемую вне крана на стройплощадке, также снабженную приемопередающим радиомодулем 13.
Для обеспечения настройки системы, считывания показаний из регистратора 6 параметров крана и передачи управляющих команд и информации система содержит пульт 14 дистанционного управления, включающий в себя блок 15 управления, блок 16 идентификации устройств системы, блок 17 считывания информации, блок 18 настройки системы, блока 19 записи информации и приемопередающий радиомодуль 20. Выход блока 15 управления подключен через блок 16 идентификации к входам блока 17 считывания информации, блока 18 настройки системы и блока 19 записи информации. Выходы блока 18 настройки системы и блока 19 записи информации подключены к входам радиомодуля 20, а блок 17 считывания информации подключен к радиомодулю 20 с помощью двухсторонней линии связи.
В предлагаемой системе блоки выполнены следующим образом.
Датчики 1-4 параметров крана содержат первичные преобразователи физического параметра (усилия, давления, угловых и линейных перемещений и т.п.) в электрический сигнал (аналоговый, дискретный, цифровой) и PIC-процессор для преобразования этого сигнала в последовательный код.
Цифровой блок 5 обработки данных представляет собой PIC-процессор со стандартным набором элементов, включая аналого-цифровой преобразователь, мультиплексор, запоминающие устройства, параллельными и последовательным портами и т.д. Он снабжен усилителями для подключения исполнительных устройств на чертеже не показаны) и регистратором 6 параметров крана. Для реализации цифрового блока 5 можно использовать микропроцессор MSP430F149 фирмы «Texas Instruments» (США) или другие микропроцессоры подобного типа.
Цифровая станция 12 диспетчерского контроля, регистрации и хранения данных представляет собой персональную электронно-вычислительную машину (ПЭВМ) со стандартным набором блоков, обеспечивающим запросы, прием и хранение информации. Станция 12 может быть единой для группы кранов, находящихся на строительной площадке.
Пульт 14 дистанционного управления представляет собой переносное устройство и состоит из блока 15 управления в виде набора переключателей (клавиатуры), обеспечивающего выбор режима работы (направления передачи информации), выход которого подключен к блоку 16 идентификации устройств системы, обеспечивающего кодирование команд в соответствии с выбранным направлением.
Блоки 17-19 представляют собой логические устройства, обеспечивающие обмен информацией соответственно:
- с цифровым блоком 5 обработки данных (считывание информации);
- с цифровым блоком 5 обработки данных и датчиками 1-4 (настройка системы);
- с цифровой станцией 12 (запись информации в ПЭВМ).
Все блоки системы определяются своим индивидуальным идентификационным кодом. Передача данных осуществляется посылками, представляющими собой команду для выполнения, которая содержит код выполняемой команды, код устройства, информационные данные, контрольную сумму.
Приемопередающие радиомодули 7-11, 13 и 20 представляют собой каждый FSK трансивер (например, интегральный однокристальный приемопередатчик ХЕ1205), обеспечивающий двунаправленную полудуплексную связь с возможностью быстрой перестройки частоты и NRZ кодирование, а также для создания многоканального FSK трансивера.
Система работает следующим образом.
При первоначальной установке системы производится ее настройка (юстировка) на кране с целью минимизации погрешностей как самой системы (прежде всего датчиков и узлов их установки), так и погрешностей, вызванных отклонением параметров крана от расчетных значений.
Блок 5 обработки данных включает в себя электропрограммируемое запоминающее устройство, в которое при настройке с пульта 14 заносятся как расчетные (или измеренные внешними измерительными приборами высокой точности) значения контролируемых параметров, так и соответствующие им показатели, определяемые по сигналам датчиков 1-4. На основании этих данных вычисляется поправка к показаниям датчиков, измеряемым в рабочем режиме системы. Для этого оборудование крана, контролируемое датчиками, входящими в состав системы, устанавливается в ряд позиций, параметры которых измеряются этими датчиками и наладчиком по команде с пульта 14 (по каналу блока 18 настройки) и записываются в «память» блока 5 обработки данных. Затем в «память» блока 5 записывается фактическое значение параметра.
Точно так же настраивается канал датчика нагрузки (усилия или давления), для чего подвешивается на крюк известный (калибровочный) груз, и в «память» блока 5 записывается информация датчика нагрузки в результате воздействия калибровочного груза и фактическое значение нагрузки.
Таким образом, в блок 5 заносятся данные для вычисления поправок и коррекции показаний датчиков. Все поправки хранятся в блоке 5 в течение всего времени эксплуатации крана (или до момента повторной юстировки).
После этого наладчик с пульта 14 переводит систему из режима наладки в режим работы, при котором блок 5 обработки данных в соответствии с его программой опрашивает датчики 1-4, обрабатывает их данные и создает управляющие и информационные сигналы в зависимости от соотношения фактических и допустимых показателей работы крана. Одновременно показатели работы фиксируются в регистраторе 6.
Считывание информации из регистратора 6 может быть осуществлено по запросу цифровой станции 12, но может быть произведено непосредственно с пульта 14 (по каналу блока 17). В блок 17 считывания записывается телеметрическая информация, в которой фиксируется информация о включениях механизмов, текущих параметрах и длительности операций, выполненных краном в течение последних часов работы, а также эксплуатационных параметрах, которые регистрируются накапливающимся итогом. При необходимости эта информация с пульта 14 по каналу блока 19 может быть передана на цифровую станцию 12.
Все рассмотренные режимы осуществляются дистанционно по радиоканалу наладчиком (оператором), находящимся на удобном для себя рабочем месте по отношению к крану.
Предлагаемая система контроля и регистрации работы грузоподъемного крана может быть изготовлена промышленным способом на приборостроительном предприятии с использованием современных электронных компонентов и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2269483C2 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279714C1 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282576C2 |
| СИСТЕМА КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ШКОЛЬНОГО АВТОБУСА | 2008 |
|
RU2364942C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БЕСПРОВОДНОЙ КОНТРОЛЛЕР | 2018 |
|
RU2678157C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2317938C1 |
| Система автоматизированного контроля работ на скважинах и нефтепромысловом оборудовании, не оснащенных или частично оснащенных АСУ ТП | 2018 |
|
RU2699101C1 |
| Система и способ дистанционного контроля и регистрации технологических операций на транспорте | 2020 |
|
RU2744500C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2009 |
|
RU2417937C1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах безопасности и контроля кранов. Способ заключается в передаче команд управления с расположенного вне крана пульта дистанционного управления (ПДУ) с использованием линии двухсторонней беспроводной связи, измерении рабочих параметров крана, преобразовании измеренных величин в цифровые сигналы, определении допустимой нагрузки и предельных положений оборудования крана и отключения его механизмов при достижении предельных значений, записи на кране управляющих и информационных сигналов и времени их появления в долговременную энергонезависимую память с возможностью считывания в случае необходимости, а также их дистанционную передачу на расположенную вне крана станцию диспетчерского контроля. Дополнительно по команде с ПДУ передают на него записанные на кране информационные и управляющие сигналы и записывают эти сигналы в энергонезависимую память ПДУ с возможностью считывания в случае необходимости путем передачи сигналов на станцию диспетчерского контроля, регистрации и хранения данных о работе крана, при этом для передачи всех сигналов используют двухсторонние беспроводные линии связи. Техническим результатом является повышение надежности контроля и регистрации рабочих параметров крана. 1 ил.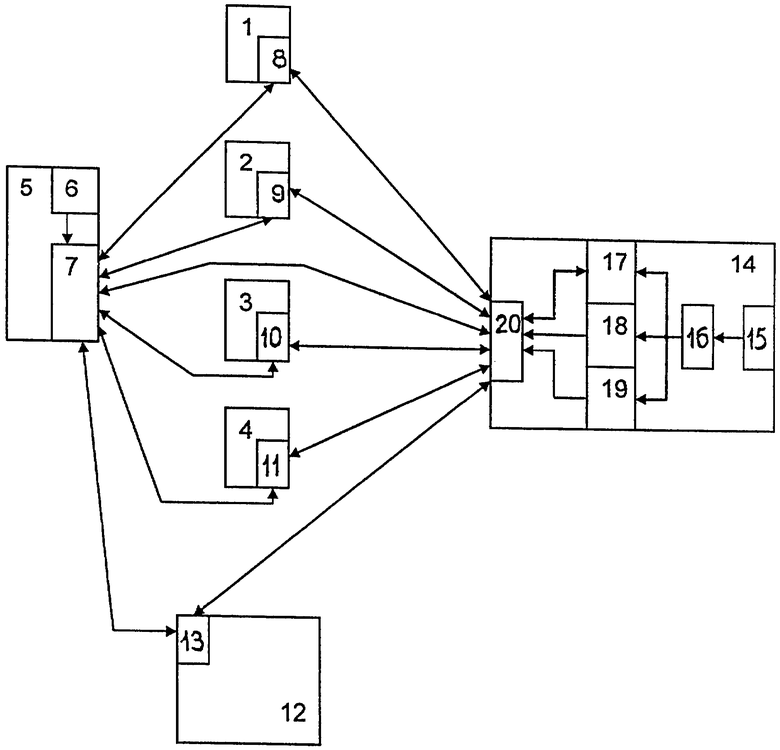
Способ контроля и регистрации работы грузоподъемного крана, включающий передачу команд управления с расположенного вне крана пульта дистанционного управления с использованием линии двухсторонней беспроводной связи, измерение рабочих параметров крана, преобразование измеренных величин в цифровые сигналы, определение допустимой нагрузки и предельных положений оборудования крана и отключения его механизмов, когда фактическая нагрузка на кран превысит допустимое значение или при достижении предельных положений оборудования, запись на кране управляющих и информационных сигналов и времени их появления в долговременную энергонезависимую память с возможностью считывания в случае необходимости, а также их дистанционную передачу на расположенную вне крана станцию диспетчерского контроля, регистрации и хранения данных о работе крана, отличающийся тем, что дополнительно по команде с пульта дистанционного управления передают на него записанные на кране информационные и управляющие сигналы и записывают эти сигналы в энергонезависимую память пульта дистанционного управления с возможностью считывания в случае необходимости путем передачи сигналов на станцию диспетчерского контроля, регистрации и хранения данных о работе крана, при этом для передачи всех сигналов используют двухсторонние беспроводные линии связи.
| Триер | 1937 |
|
SU58111A1 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282576C2 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2269483C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ БАШЕННЫМ КРАНОМ | 2001 |
|
RU2259579C2 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| US 5730305 A, 24.03.1998. | |||

