Изобретение относится к области машиностроения и может быть использовано для контроля и диагностики неисправности, а также для считывания телеметрической информации (регистратора параметров) приборов безопасности грузоподъемных машин, в частности стреловых грузоподъемных кранов.
Известен способ контроля исправности датчика угла наклона стрелы крана путем выявления выхода выходного сигнала этого датчика за установленные пределы и соответствующего формирования светового сигнала индикации [1].
Устройство для осуществления этого способа содержит четыре компаратора, подключенные к выходам аналоговых вычислителей, и две контрольные лампы, которые через силовые ключи подключены к выходам компараторов [1].
Недостатком этого технического решения являются невысокие функциональные возможности, поскольку в нем осуществляется контроль исправности не всего прибора безопасности, а только его одной составной части - датчика угла наклона стрелы.
Известен также способ контроля исправности ограничителя грузоподъемности крана путем сопоставления выходных сигналов отдельных датчиков и формирования аварийного сигнала в случае, когда выходные сигналы датчиков отличаются друг от друга на установленную величину, например 20% [2].
Устройство для осуществления данного способа содержит блоки выделения наибольшего и наименьшего сигналов датчиков, выходы которых через разностный усилитель и блок деления подключены к входам компаратора, выход которого соединен с входом блока сигнализации [2].
Это техническое решение обеспечивает повышенную надежность определения неисправности датчиков. Однако необходимость установки трех датчиков для каждого контролируемого параметра существенно усложняет его техническую реализацию.
В усовершенствованном варианте известного способа дополнительно выявляется среднее арифметическое значение выходных сигналов трех датчиков, выявляется датчик с наибольшим отклонением от этого среднего значения, на основании чего, кроме сигнализации неисправности, производится автоматическое отключение отказавшего датчика [3].
Устройство, реализующее этот способ, дополнительно содержит выполненные на операционных усилителях схемы формирования средних арифметических значений выходных сигналов трех датчиков, выходы которых через схемы ИЛИ-И соединены с контрольными реле, контакты которых включены последовательно с выходными сигналами усилителей датчиков [3].
В этом усовершенствованном техническом решении обеспечивается повышенная надежность за счет резервирования датчиков, но не устраняет основной недостаток базового технического решения - повышенная сложность. Кроме того, осуществляется контроль исправности только датчиков, а не прибора безопасности в целом.
Последнего недостатка не имеет способ контроля исправности ограничителя грузоподъемности (прибора безопасности) крана путем перевода этого ограничителя в режим тестирования, формирования тестовых сигналов, соответствующих выбранным точкам грузовой характеристики крана, их подключения к ограничителю грузоподъемности взамен выходных сигналов датчиков вылета и веса груза, сопоставления фактического выходного сигнала по грузовому моменту с максимально допустимым для данного вылета и формирования в результате этого контрольного сигнала исправности ограничителя [4].
Устройство для осуществления этого способа содержит блок контрольных кнопок, подключенных к делителю напряжения, блок формирования замещающего тестового сигнала, компаратор и реле, переключающие контакты которого включены в выходные цепи датчиков вылета и веса груза. Причем блок формирования замещающего тестового сигнала выполнен в виде интегратора и повторителя напряжения [4].
В данном техническом решении осуществляется контроль исправности только электронной части прибора безопасности. Но не контролируется исправность датчиков этого прибора. Кроме того, современные приборы безопасности применяются на кранах с изменяющимися грузовыми характеристиками, имеют координатную защиту, встроенный регистратор параметров и по этим причинам не могут контролироваться данным способом или реализующим его устройством.
Известен также способ настройки и контроля приборов безопасности грузоподъемных машин (кранов) путем воспроизведения реальных рабочих параметров грузоподъемной машины, воздействия ими на датчики прибора безопасности и последующего анализа результатов этих воздействий [5].
Устройство для осуществления этого способа (стенд) содержит индикатор в виде динамометра, блок взаимодействия с датчиком усилия ограничителя грузового момента, нагружающий элемент, блок для контроля и настройки датчиков угла наклона и вылета стрелы, модуль для проверки и настройки креномера, модуль для настройки анемометров, включающий задатчик скорости и блок сравнения, блок проверки и настройки сигнализаторов приближения к линии электропередачи и контрольно-измерительный блок. Для кранов, оборудованных датчиком гидравлического давления и датчиком угла маятникового типа, стенд дополнительно снабжен модулем гидравлического нагружения и блоком точной установки датчика угла, соединенными с контрольно-измерительным блоком [5].
Известное техническое решение позволяет осуществить контроль исправности различных приборов безопасности (ограничителей грузового момента) путем воспроизведения реальных рабочих параметров крана - усилий, давлений, углов наклона и т.д. Но при этом контроль отличается высокой трудоемкостью ввиду необходимости ручного выполнении всех операций. Кроме того, не обеспечивается возможность контроля приборов безопасности непосредственно на грузоподъемной машине (кране), а также не обеспечивается возможность контроля и считывания встроенного в прибор безопасности регистратора параметров.
Наиболее совершенным и близким к предложенному является способ контроля прибора безопасности грузоподъемной машины путем выявления выходных аналоговых сигналов отдельных составных частей (узлов) прибора безопасности их аналого-цифрового преобразования и передачи на контрольное устройство, обработки и регистрации этих сигналов в контрольном устройстве по записанной в нем программе (в соответствии с предварительно запомненными сигналами, определяющими порядок этой обработки и регистрации), а также формирования контрольным устройством, в случае необходимости, замещающих тестовых сигналов по определенной программе (в соответствии с предварительно запомненными сигналами, определяющими порядок формирования замещающих тестовых сигналов) и передачи последних на отдельные составные части (узлы) прибора безопасности [6].
Устройство для осуществления этого способа, наиболее близкое к предложенному, содержит блок управления, модуль ввода/вывода информации и модуль постоянного и оперативного запоминающего устройства (модуль памяти), входы/выходы которого соединены с первыми входами/выходами блока управления, вторые входы/выходы которого соединены с первыми входами/выходами модуля ввода/вывода информации, вторые входы/выходы которого выполнены с возможностью подключения к ним прибора безопасности. Модуль ввода/вывода информации содержит два коммутатора, ЦАП, буфер, АЦП, три блока хранения аналоговых сигналов и блок входных разъемов. Блок управления соединен с АЦП, буфером, первым коммутатором и ЦАП, который связан также с первым коммутатором, соединенным с буфером и блоками хранения аналоговых сигналов, которые соединены с блоком разъемов [6].
В данном техническом решении осуществляется контроль прибора безопасности с корректировкой текущей программы путем анализа выходных сигналов его отдельных составных частей, а также путем физического замещения (на аппаратном уровне) неисправных составных частей прибора безопасности.
Однако при этом из-за параллельного съема информации со всех выходных цепей прибора безопасности не обеспечивается возможность проверки прибора безопасности непосредственно на кране, не обеспечивается возможность проверки его отдельных узлов (блоков и датчиков), а также жгутов, соединяющих их на кране.
При отказе какого-либо узла прибора безопасности, например датчика, на выходе этого узла может установиться активный низкий или активный высокий уровень потенциала, что предопределяет невозможность аппаратурного замещения выходного сигнала этого узла. Поэтому при использовании известного технического решения невозможно осуществить замещение отказавшего узла прибора безопасности на кране, что приводит к снижению безопасности работы крана при частичных отказах прибора безопасности.
Кроме того, не обеспечивается контроль исправности и считывание параметров встроенного регистратора параметров прибора безопасности, поскольку не предусмотрен доступ к памяти этого регистратора.
Целью заявленного изобретения является:
- обеспечение контроля и диагностики неисправности не только микропроцессорного вычислителя (центрального блока), но и первичных преобразователей/датчиков и соединительных жгутов прибора безопасности;
- обеспечение контроля и диагностики исправности прибора безопасности непосредственно на грузоподъемном кране;
- обеспечение возможности автоматического или ручного программного отключения и последующего замещения любого функционального узла прибора безопасности без его физического отключения;
- повышение безопасности работы крана при частичных отказах прибора безопасности за счет исключения необходимости его отключения и программного замещения отказавших узлов прибора безопасности;
- расширение функциональных возможностей за счет обеспечения не только контроля и диагностики исправности прибора безопасности грузоподъемного крана, но и контроля исправности и считывания данных встроенного в прибор безопасности регистратора параметров.
В предложенном способе контроля прибора безопасности грузоподъемной машины путем выявления выходных сигналов отдельных составных частей прибора безопасности и их передачи на контрольное устройство, обработки и регистрации этих сигналов в контрольном устройстве в соответствии с предварительно запомненными сигналами, определяющими порядок этой обработки и регистрации, а также формирования контрольным устройством, в случае необходимости, замещающих тестовых сигналов, в соответствии с предварительно запомненными сигналами, определяющими порядок формирования замещающих тестовых сигналов и передачи последних на отдельные составные части прибора безопасности, указанный технический результат достигается за счет того, что указанное выявление выходных сигналов, а также формирование замещающих тестовых сигналов, в случае необходимости, осуществляют путем приема и передачи последовательных цифровых сигналов по мультиплексной линии связи. Перед формированием замещающих тестовых сигналов дополнительно могут формироваться сигналы отключения замещаемых составных частей прибора безопасности, которые передаются по мультиплексной линии связи.
При этом прием и передача последовательных цифровых сигналов по мультиплексной линии связи может осуществляться в асинхронном или синхронном режимах по алгоритмам, предусмотренным спецификациями последовательных протоколов CAN, LIN, RS-232, USB или IrDA. После приема последовательных цифровых сигналов может дополнительно выявляться отсутствие выходных сигналов отдельных составных частей прибора безопасности и по отсутствию выходных сигналов от одной составной части регистрироваться неисправность этой составной части, а при отсутствии выходных сигналов от двух и более составных частей - неисправность линии связи, соединяющей эти составные части прибора безопасности. Формирование замещающих тестовых сигналов прибора безопасности может осуществляться непосредственно при работе грузоподъемной машины, а параметры этих замещающих сигналов могут дополнительно устанавливаться ее оператором.
Указанный технический результат может достигаться также за счет того, что при приеме последовательных цифровых сигналов дополнительно может осуществляться считывание данных встроенного в прибор безопасности регистратора параметров. При этом перед считыванием регистратора параметров осуществляется формирование и передача в прибор безопасности по мультиплексной линии связи сигнала переключения этого прибора в режим считывания регистратора параметров.
В устройстве для контроля прибора безопасности грузоподъемной машины, содержащем блок управления, модуль ввода/вывода информации и модуль памяти, входы/выходы которого соединены с первыми входами/выходами блока управления, вторые входы/выходы которого соединены с первыми входами/выходами модуля ввода/вывода информации, вторые входы/выходы которого выполнены с возможностью подключения к ним прибора безопасности, указанный технический результат получается за счет того, что модуль ввода/вывода информации выполняется в виде приемопередатчика интерфейса мультиплексной линии связи, в частности в виде приемопередатчика CAN, LIN, RS-232, USB или IrDA интерфейса.
Для получения необходимого результата устройство может дополнительно содержать модуль управления, выходы которого подключаются к первым входам блока управления или модуля ввода/вывода информации, и модуль индикации, входы которого подключаются к выходам блока управления или модуля ввода/вывода информации. Блок управления может быть выполнен с возможностью программного формирования команд отключения отдельных составных частей прибора безопасности, а устройство в целом может быть выполнено в виде персонального компьютера.
На чертеже показана функциональная схема предложенного устройства и его подключение к прибору безопасности грузоподъемной машины.
Устройство для контроля 1 прибора безопасности 2 грузоподъемной машины (контрольное устройство или стенд 1) содержит блок управления 3 и подключенные к нему модуль ввода/вывода информации 4, модуль памяти 5. Модуль ввода/вывода информации 4 выполнен в виде приемопередатчика интерфейса мультиплексной линии связи 6 с возможностью его подключения к прибору безопасности 2.
Устройство 1 может дополнительно содержать модуль управления 7, подключенный к первым входам блока управления 3, и модуль индикации 8, входы которого подключены к выходам блока управления. Контрольное устройство 1 может быть выполнено в виде персонального компьютера.
Модуль управления 7 может быть выполнен в виде набора кнопок-клавиш, модуль индикации 8 - в виде набора светодиодных индикаторов или жидкокристаллического дисплея. Возможно подключение модулей управления 7 и индикации 8 не к блоку управления 3, а к модулю ввода/вывода информации 4 (на чертеже условно не показано).
Модуль ввода/вывода информации 4 выполнен в виде приемопередатчика CAN, LIN, RS-232, USB или IrDA интерфейса мультиплексной линии связи 6 на основе стандартных микросхем типа МСР2510, МС33199, TUSB2036 и т.д., блок управления - на основе микроконтроллера, а модуль памяти - на основе микросхем Flash-памяти.
Соединение устройства 1 с прибором безопасности 2 по мультиплексной линии связи 6 может осуществляться при помощи электрических разъемов (на чертеже условно не показаны), а в случае применения интерфейса IrDA - по оптическом каналу. В последнем случае прибор безопасности 2 дополнительно снабжается приемопередатчиком IrDA, подключенным либо к мультиплексной линии связи 6, либо к микропроцессорному вычислителю 9.
Прибор безопасности 2, кроме микропроцессорного вычислителя 9, содержит блок памяти 10, использующийся в качестве блока памяти встроенного регистратора параметров, и N датчиков/первичных преобразователей 11 (11.1, 11.2,..., 11.N), в качестве которых используются датчики нагрузки, угла наклона стрелы, длины стрелы и т.д. При необходимости, прибор безопасности 2 может содержать дополнительные блоки/модули, например исполнительный модуль, модуль реального времени и т.д.
Отдельные пространственно разнесенные составные части прибора безопасности 2, в частности датчики 11.1, 11.2,..., 11.N, объединены между собой мультиплексной линией связи 6 и, соответственно, имеют встроенные контроллеры этой линии.
При работе прибора безопасности 2 датчики 11 (11.1, 11.2,..., 11.N) осуществляют измерение рабочих параметров грузоподъемной машины и контроль положения ее грузоподъемного оборудования. Микропроцессорный вычислитель 9 работает по записанной в памяти его микроконтроллера программе и в последовательном коде по мультиплексной линии связи 6 поочередно формирует запрос на получение информации от датчиков 11. Каждый запрос содержит стартовый бит (преамбулу), адрес датчика, команду, контрольную сумму и стоповый бит.
Каждый датчик 11.1, 11.2,..., 11.N осуществляет прием информации с мультиплексной линии связи 6 и после окончания приема производит проверку контрольной суммы. При совпадении контрольной суммы датчик сравнивает принятый адрес с собственным адресом и в случае их совпадения передает ответную информацию. При этом другие датчики 11.1, 11.2,..., 11.N, адреса которых не совпадают с переданным адресом, игнорируют принятую информацию и находятся в режиме ожидания обращения к ним. Аналогичным образом происходит обмен информацией с другими узлами/модулями прибора безопасности 2, подключенными к мультиплексной линии связи 6, - с исполнительным модулем, с модулем реального времени и т.д.
После получения информации от датчиков 11 микропроцессорный вычислитель 9 осуществляет сравнение фактического нагружения грузоподъемной машины с предельно допустимым, а также сравнение фактического положения грузоподъемного оборудования с зоной допустимых положений, заданных при введении координатной защиты, и в зависимости от результатов указанных сравнений по общей мультиплексной линии связи 6 передает в исполнительный блок (на чертеже условно не показан) сигналы индикации и сигналы блокировки включения исполнительных механизмов грузоподъемной машины, осуществляя ее защиту от перегрузки по грузовому моменту и защиту от столкновений стрелового оборудования с препятствиями (координатную защиту).
Одновременно микропроцессорный вычислитель 9 осуществляет запись информации в блок памяти 10 - во встроенный регистратор параметров.
В мультиплексной линии связи 6 содержится вся основная информация о работе грузоподъемной машины и о работе прибора безопасности - передаваемые адреса отдельных узлов прибора безопасности, команды, данные и т.д.
Блок управления 3 устройства контроля 1 через модуль ввода/вывода информации 4 осуществляет считывание информации с мультиплексной линии связи 6, по адресам передаваемой информации производит ее сортировку и далее сопоставляет соответствие реакции микропроцессорного вычислителя 9 сигналам, поступающим с датчиков 11.1, 11.2,..., 11.N.
В простейшем случае в памяти микроконтроллера блока управления 3 или в модуле памяти 5 хранится копия программы микропроцессорного вычислителя 9. Поэтому блок управления 3 методом прямого сравнения результатов работы этой программы и реакции микропроцессорного вычислителя 9 на выходные сигналы датчиков 11.1, 11.2,..., 11.N осуществляет контроль исправности микропроцессорного вычислителя 9.
В приборе безопасности 2 каждый датчик/узел может иметь встроенные средства самоконтроля. В этом случае каждый датчик/узел при передаче информации в мультиплексную линию связи дополнительно передает сигнал (бит) своей исправности. Блок управления 3 осуществляет считывание этих цифровых сигналов подтверждения исправности датчиков 11.1, 11.2,..., 11.N, а также других узлов прибора безопасности, подключенных к мультиплексной линии связи 6, и в случае отсутствия этих сигналов формирует соответствующие диагностические сигналы и передает их на модуль индикации 8.
Если датчики 11 и другие составные части прибора безопасности не содержат встроенных средств самоконтроля, то блок управления 3 контролирует наличие сигналов/ответов от каждого датчика/узла в мультиплексной линии связи, по их отсутствию автоматически выявляет отказы этих датчиков/узлов и передает информацию об отказах на модуль индикации 8.
Дополнительно у каждого датчика/узла может осуществляться контроль предельных значений передаваемых ими цифровых сигналов и соответствующее формирование сигналов неисправности в случае выхода этих значений за допустимые пределы.
Если отсутствует сигнал от одного датчика/узла, то это идентифицируется как отказ именно этого датчика/узла. А в случае отсутствия в мультиплексной линии связи сигналов от двух и более датчиков/узлов идентифицируется как отказ/неисправность соединительных жгутов. Это основано на том, что одновременный отказ двух и более датчиков или узлов прибора безопасности маловероятен.
Если на мультиплексной линии связи постоянно находится уровень логической единицы или логического нуля, т.е. если передача цифровых сигналов по мультиплексной линии связи 6 вообще не осуществляется, то это также идентифицируется как отказ соединительных жгутов - короткое замыкание на плюс бортовой сети или на массу машины. В итоге, в предложенном техническом решении осуществляется контроль исправности как отдельных датчиков, узлов и блоков, так и соединительных жгутов.
Блок управления 3 по заложенной в него программе или по команде, поступающей с модуля управления 7, формирует на микропроцессорный вычислитель 9 запрос на считывание данных встроенного регистратора параметров, записанных в блоке памяти 10. Этот запрос передается в прибор безопасности по мультиплексной линии связи 6 в виде сигнала/команды переключения прибора безопасности 2 в режим считывания регистратора параметров. Формат этого запроса отличается от форматов других сигналов в мультиплексной линии связи адресом запроса, командой и т.п. и устанавливается в соответствии со спецификацией использующегося протокола.
Микропроцессорный вычислитель 9, получив эту команду, прекращает обмен информацией с датчиками 11.1, 11.2,..., 11.N и по мультиплексной линии связи 6 последовательно побайтно передает блоку управления 3 содержимое встроенного регистратора параметров - блока памяти 10. Далее эта информация передается на модуль индикации 8 или записывается в модуль памяти 5. При этом блок управления 3, осуществляя проверку, например, контрольной суммы, проверяет как правильность считывания, так и исправность встроенного регистратора параметров прибора безопасности 2.
Блок управления 3, работая по заложенной в него программе и формируя сигналы в последовательных кодах в мультиплексной линии связи, может осуществить полную имитацию любых датчиков и функциональных узлов прибора безопасности, обеспечивая тем самым эффективную и полную программную проверку всего прибора безопасности в целом. Проверка может проводиться в автоматизированном режиме, а любой недостающий датчик или узел может быть программно замещен.
При этой проверке блок управления 3, работая по программе, записанной в памяти его микроконтроллера или в модуле памяти 5, может устанавливать (имитировать) значения выходных сигналов всех отдельных функциональных узлов прибора безопасности 2, включая датчики 11.1, 11.2,..., 11.N, по любым удобным для проверки законам - синусоидальное, пилообразное, случайное изменение и т.д.
В случае необходимости, отдельные составные части прибора безопасности 2 могут отключаться по сигналам/командам, поступившим от устройства 1 по мультиплексной линии связи 6.
Подключение устройства к прибору безопасности 2 через мультиплексную линию связи 6 позволяет осуществлять контроль этого прибора без нарушения его функционирования. При этом не требуется переключения электрических разъемов или установки каких-либо вставок, ответвлений и т.п. в соединительные жгуты. Благодаря этому обеспечивается возможность контроля прибора безопасности непосредственно на кране.
В предложенном техническом решении достигается также повышение безопасности работы крана при частичных отказах прибора безопасности путем программного замещения любого отказавшего узла прибора безопасности при работе непосредственно на грузоподъемном кране.
Если, например, при работе грузоподъемной машины произошел отказ микропроцессорного вычислителя 9 прибора безопасности 2 и необходимо завершить выполнение текущей грузоподъемной операции, то в подобных случаях, как правило, производят полное отключение прибора безопасности и завершают эту операцию без прибора безопасности, что небезопасно. В предложенном техническом решении в подобных ситуациях достаточно подключить устройство контроля 1 по мультиплексной линии связи 6 к прибору безопасности 2. При этом блок управления 3 автоматически выявляет отказ микропроцессорного вычислителя 9 и, передавая сигналы по мультиплексной линии связи 6, осуществляет его программное замещение, используя копию рабочей программы микропроцессорного вычислителя 9.
В случае отказа какого-либо датчика 11 блок управления 3 также осуществляет его программное замещение. Но в этом случае в зависимости от характера отказа может понадобиться ввод значений выходных сигналов отказавшего датчика оператором в ручном режиме с помощью модуля управления 7.
Перед замещением отказавшей составной части прибора безопасности 2 блок управления 3 по мультиплексной линии связи 6 формирует сигналы отключения отказавших составных частей. Особенности этого формирования, включая форматы команд, определяются спецификациями последовательных протоколов интерфейса CAN, LIN, RS-232, USB или IrDA.
Причем это отключение и замещение осуществляются программно, т.е. без физического отключения (без отсоединения разъемов и т.п.) отказавшей составной части. Благодаря этому обеспечивается возможность оперативного отключения и замещения отказавшей составной части непосредственно на грузоподъемном кране. Для этого на приборе безопасности 2 устанавливается дополнительный электрический разъем для подключения контрольного устройства 1 к мультиплексной линии связи 6, а отдельные составные части/узлы прибора безопасности 2 выполняются с возможностью их программного отключения.
В любом случае, при частичных отказах прибора безопасности он полностью не выключается, что обеспечивает повышение безопасности работы крана.
С учетом изложенного реализация отличительных признаков предложенного технического решения позволяет осуществить контроль не только центрального блока, но и первичных преобразователей/датчиков и соединительных жгутов прибора безопасности, в том числе непосредственно на грузоподъемном кране, повысить безопасность работы крана, а также обеспечить считывание данных встроенного регистратора параметров.
Источники информации
1. А.с. СССР №1131821 А, МПК 3 В 66 С 23/88, 30.12.1984.
2. А.с. СССР №1390172 A1, МПК 4 B 66 C 15/06, 23.04.1988.
3. А.с. СССР №1796585 A1, МПК 6 B 66 C 23/90, 15/06, 23.02.1993.
4. А.с. СССР №1197989 С1, МПК 4 B 66 C 23/90, 15/06, 15.12.1985.
5. Патент России №2070161 С1, МПК 6 В 66 С 15/06, 10.12.1996.
6. Патент России №2087409 С1, МПК 6 B 66 C 23/88, G 01 M 17/00, 20.08.1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2277065C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| СПОСОБ СИГНАЛИЗАЦИИ О РАБОТЕ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2276095C2 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗОК | 2004 |
|
RU2276096C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2003 |
|
RU2262481C2 |
| СПОСОБ РЕГИСТРАЦИИ И РЕГИСТРАТОР ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2307060C2 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
Группа изобретений относится к устройствам для контроля исправности приборов безопасности грузоподъемных машин и считывания параметров их встроенных регистраторов параметров. Предложен способ контроля прибора безопасности грузоподъемной машины путем выявления выходных сигналов отдельных составных частей прибора безопасности и их передачи на контрольное устройство, обработки и регистрации этих сигналов в контрольном устройстве в соответствии с предварительно запомненными сигналами, определяющими порядок этой обработки и регистрации, а также формирования контрольным устройством, в случае необходимости, замещающих тестовых сигналов в соответствии с предварительно запомненными сигналами, определяющими порядок формирования замещающих тестовых сигналов, и передачи последних на отдельные составные части прибора безопасности. Выявление выходных сигналов, а также формирование замещающих тестовых сигналов осуществляют путем приема и передачи последовательных цифровых сигналов по мультиплексной линии связи в асинхронном или синхронном режимах по алгоритмам, предусмотренным спецификациями последовательных протоколов. Устройство для контроля прибора безопасности грузоподъемной машины содержит блок управления, модуль ввода/вывода информации и модуль памяти. Модуль ввода/вывода информации выполнен в виде приемопередатчика мультиплексной линии связи CAN, LIN, RS-232, USB или IrDA интерфейса. Группа изобретений обеспечивает не только контроль исправности прибора безопасности, но и считывание данных встроенного регистратора параметров, позволяет осуществить контроль исправности соединительных жгутов, обеспечить контроль и диагностику исправности прибора безопасности непосредственно на грузоподъемном кране, а также повысить безопасность работы крана при частичных отказах прибора безопасности за счет автоматического или ручного программного отключения и последующего замещения любого отказавшего функционального узла прибора безопасности без его физического отключения, а также без полного отключения частично отказавшего прибора безопасности. 2 н. и 10 з.п. ф-лы, 1 ил.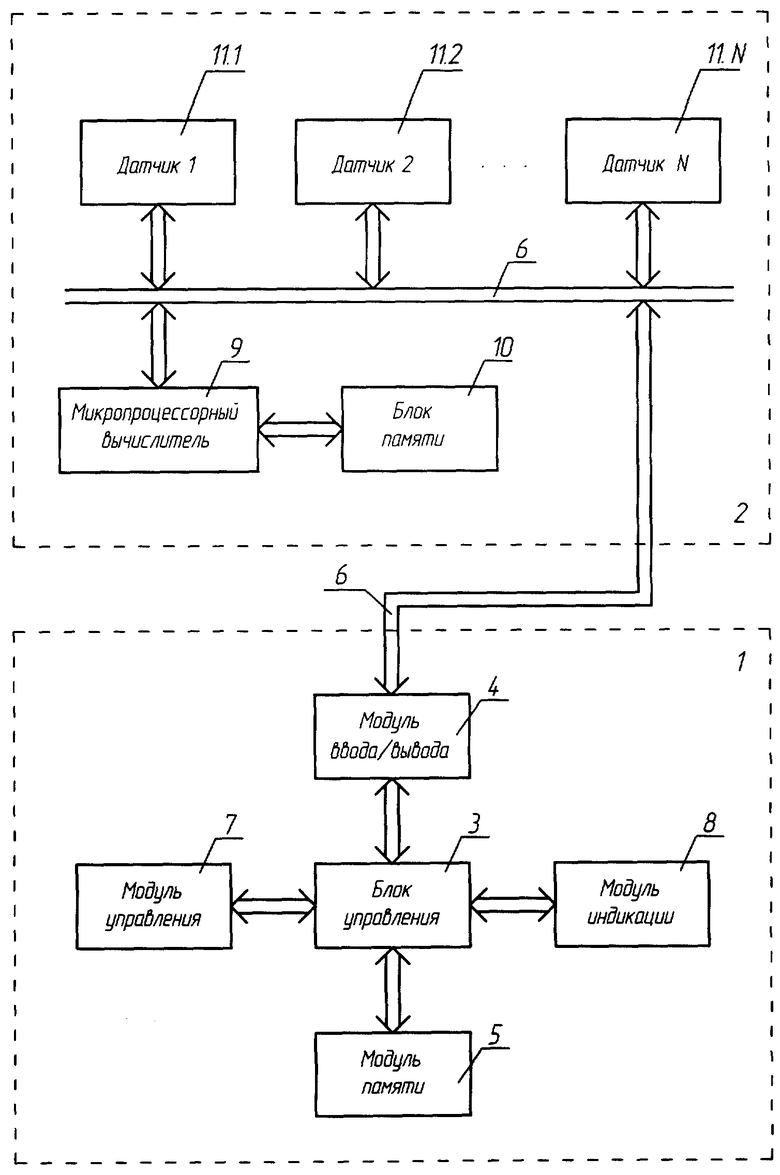
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ НЕИСПРАВНОСТИ ПРИБОРОВ | 1994 |
|
RU2087409C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И КОНТРОЛЯ ПРИБОРОВ БЕЗОПАСНОСТИ КРАНОВ | 1993 |
|
RU2070161C1 |
| Ограничитель грузоподъемности крана | 1982 |
|
SU1197989A1 |
| Устройство для контроля исправности ограничителя грузоподъемности крана | 1990 |
|
SU1796585A1 |

