Изобретение относится к транспортным средствам, в частности к системе управления и улучшения ходовых качеств моста вездеходного транспортного средства.
Известна «Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия» по описанию изобретения №2197403, класс МПК В 62 D 9/04, опубликовано в БИ №3, 27.01.2003 г.
Данная система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия предназначена для улучшения управления транспортным средством.
Система управления содержит сферические колеса, наклоняющиеся в поперечной плоскости транспортного средства на горизонтальных шарнирах, оси которых расположены в продольных плоскостях транспортного средства и со смещением относительно центра сфер колес к наружной стороне сферического колеса.
Наклоны левого и правого сферических колес мостов осуществляются трапециями автомобильного типа, расположенными вертикально в поперечной плоскости транспортного средства. Трансмиссия двухсекционного сочлененного вездеходного транспортного средства выполнена гибкими валами с подводом ими крутящего момента к сферическим колесам через встроенные в них понижающие редукторы, расположенные на осях горизонтальных шарниров наклона сферических колес.
Недостатком данной системы управления является невозможность изменения быстроты реакции рулевого управления при выполнении поворотов транспортного средства, а также невозможность отключения крутящего момента, передаваемого на сферические колеса мостов для передвижения транспортного средства в режиме движения по твердым поверхностям и для целей буксировки.
Целью предлагаемого изобретения является создание системы управления моста вездеходного транспортного средства, свободной от вышеперечисленных недостатков, что повлечет за собой улучшение управления вездеходного транспортного средства и расширение его вездеходных возможностей.
Поставленная задача достигается тем, что система управления моста вездеходного транспортного средства содержит колеса, выполненные сферическими, оси сферических колес расположены на горизонтальных шарнирах наклона сферических колес. Наклоны левого и правого сферического колеса моста осуществляются трапецией автомобильного типа. Крутящий момент от двигателя передается на сферические колеса посредством системы валов, а также редукторов, установленных на горизонтальных шарнирах наклона сферических колес, при этом в системе передачи крутящего момента на каждое сферическое колесо моста вездеходного транспортного средства имеется возможность его отключения от передаваемого на него крутящего момента путем разъединения шестерен редукторов сферических колес. Это необходимо для возможности отключения любого моста вездеходного транспортного средства при передвижении его по твердым поверхностям, а также для его буксировки.
Каждый рычаг наклонов сферических колес трапеций управления выполнен из двух частей, с возможностью перемещения и фиксации одной из них относительно другой и возможностью закрепления каждого конца тяги трапеции управления на своей перемещаемой части каждого рычага. Такое устройство рычагов наклона сферических колес моста выполнено для возможности перевода сферических колес в мосту вездеходного транспортного средства на различные исходные углы наклонов относительно опорной поверхности при прямолинейном движении моста. Этим достигается возможность получения различных скоростей маневренности для различных условий применения системы управления моста вездеходного транспортного средства.
В связи с тем, что у наклоняемого сферического колеса контакт с опорной поверхностью (особенно при передвижении в заглубленном состоянии - песок, болото, снег и т.п.) захватывает некоторый широтный участок сферического колеса, на краях которого расположены различные контактируемые с опорной поверхностью диаметры, создается момент разворота сферического колеса во внешнюю от вездехода сторону. Для компенсации этого момента разворота необходимо учитывать схождение осей сферических колес моста вездеходного транспортного средства, добиваясь его регулировкой оптимальной управляемости вездехода.
В поверхностях качения колес моста вездеходного транспортного средства могут быть использованы поверхности, образованные при вращении участков любых функциональных кривых или их комбинаций вокруг соответственно расположенных осей симметрии, с получением выпуклых поверхностей вращения с возможностью выполнения ими задачи плавного перехода таких поверхностей при перекате их по опорной поверхности на разные диаметры качения, при наклонах их осей симметрии.
В качестве аналога предлагаемому изобретению взята «Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия» по источнику информации [1].
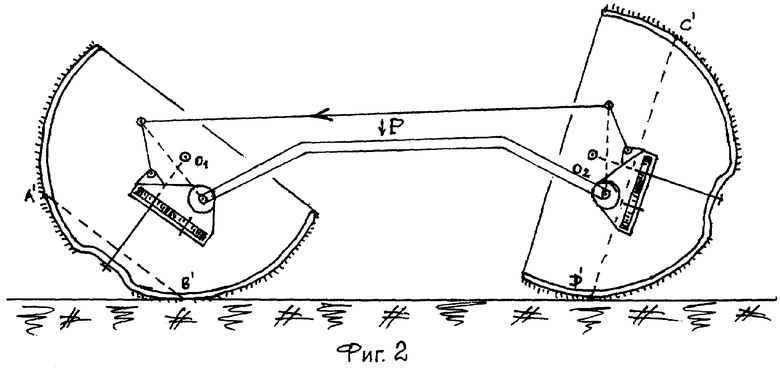
На фиг.1 изображена система управления моста вездеходного транспортного средства при его прямолинейном движении.
На фиг.2 изображена система управления моста вездеходного транспортного средства при выполнении им поворота.
На фиг.3 изображена система управления моста вездеходного транспортного средства при перестановке и фиксации подвижной части рычагов трапеции управления для придания мосту вездеходного транспортного средства иных маневренных и вездеходных возможностей при прямолинейном движении моста.
На фиг.4 изображена система управления моста вездеходного транспортного средства при переставленных и зафиксированных подвижных частях рычагов трапеции управления наклоном сферических колес моста при выполнении им поворота.
Предлагаемая система управления моста вездеходного транспортного средства состоит из следующих узлов, агрегатов и деталей.
На балке 1 моста вездеходного транспортного средства (фиг.1) находятся горизонтальные шарниры 7, на которых расположены корпуса редукторов 9 с осями 8 сферических колес 6 и самими сферическими колесами 6. На корпусах редукторов 9 находятся рычаги 5 наклонов сферических колес 6, соединенные с тягой 2 трапеции управления через подвижные части рычагов 4, имеющие механизм фиксации 3 с рычагами 5 наклонов сферических колес 6.
Система управления моста вездеходного транспортного средства работает следующим образом.
При перемещении тяги 2 трапеции управления (фиг.2) происходит (через подвижные части рычагов 4, скрепленные механизмом фиксации 3 с рычагами 5 наклонов сферических колес 6, расположенных на корпусах редукторов 9) наклон осей 8 и самих сферических колес 6 вокруг горизонтальных шарниров 7, находящихся на балке 1 моста вездеходного транспортного средства. При этом сферические колеса 6 моста переходят с одинаковых диаметров качения АВ и CD (фиг.1) на разные диаметры А'В' и C'D' (фиг.2).
При этом системой управления моста вездеходного транспортного средства строится конус поворота сферическими колесами 6 разными диаметрами каждого сферического колеса 6 A'B' и C'D' (фиг.2), который при передвижении моста заставляет его разворачиваться в сторону меньшего диаметра одного из сферических колес. При закреплении механизмом фиксации 3 подвижных частей рычагов 4 с рычагами 5 трапеции управления в других взаимных положениях получим систему управления вездеходного транспортного средства с иными возможностями маневренности и вездеходности (фиг.3, 4). При этом чем более меньшие начальные диаметры EF и NM (фиг.3) (при прямолинейном движении моста) переведены сферические колеса 6, тем чувствительнее, т.е. быстрее, строится конус поворота моста при переходе сферических колес 6 на разные диаметры качения E'F' и N'M' (фиг.4), при одинаковых угловых перемещениях осей 8 сферических колес 6 в первом случае (фиг.1, 2) и во втором (фиг.3, 4) изменение наклонов сферических колес 6 дает возможность мосту вездеходного транспортного средства пересекать водные препятствия или непроходимые болота в варианте водоизмещающих чашек обоих сферических колес 6 при несимметричности погружения каждого сферического колеса в опорную поверхность для создания ими тяги.
В этом случае вода или грязь не попадет на элементы привода сферических колес 6.
Предлагаемая конструкция системы управления моста вездеходного транспортного средства улучшает и оптимизирует характеристики его управляемости, маневренности и вездеходности.
Источники информации
1. Изобретение №2197403, класс МПК B 62 D 9/04, опубликовано в БИ №3, 27.01.2003 г.


Изобретение относится к транспортным средствам, в частности к системе управления мостом вездеходного транспортного средства. Мост вездеходного транспортного средства содержит колеса, выполненные сферическими по одному варианту выполнения, или по другому варианту выполнения в поверхностях качения колес могут быть использованы участки любых функциональных кривых, дающих возможность при их вращении вокруг соответствующих осей симметрии получить выпуклые поверхности, могущие выполнить задачу плавного перехода этих поверхностей на разные контактирующие с опорной поверхностью диаметры при наклонах их осей симметрии. Оси колес расположены на горизонтальных шарнирах наклона колес. Наклон левого и правого колес моста осуществлен трапецией автомобильного типа. Крутящий момент передается на колеса посредством системы валов и редукторов. Рычаги трапеции управления наклоном колес выполнены из двух частей с возможностью перемещения одной из них относительно другой и возможностью фиксации их друг относительно друга, что делает возможным получение различных исходных наклонов колес относительно опорной поверхности при прямолинейном движении моста. Тяга трапеции управления закреплена каждым своим концом на соответствующей ему перемещаемой и фиксируемой части каждого рычага трапеции управления наклоном колес моста. Техническим результатом является улучшение управления вездеходного транспортного средства и расширение его вездеходных возможностей. 2 н. и 2 з.п. ф-лы, 4 ил.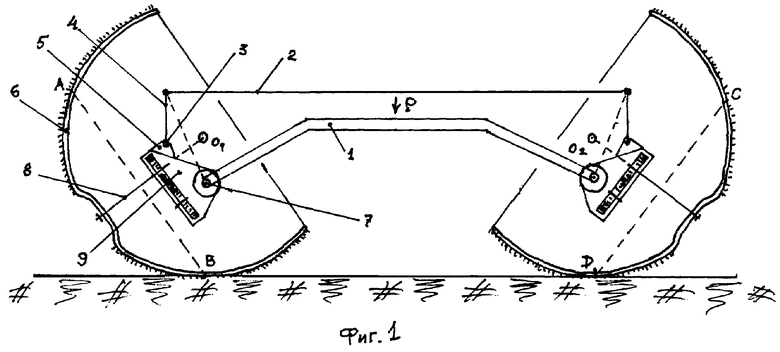
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО ТРАНСМИССИЯ | 2001 |
|
RU2197403C2 |
| US 4785899 А, 22.11.1988 | |||
| DE 19537065 А1, 27.03.1997 | |||
| US 4624469 A, 25.11.1986. | |||

