Складские стеллажи широко используются, например, в аптеках, позволяя хранить и быстро находить в относительно маленьком помещении достаточно большое количество различных лекарств. При этом нужно учитывать, что многие лекарства имеются в аптеке вообще только в одном экземпляре, а упаковки имеют, кроме того, разные размеры. Как правило, различные лекарственные препараты не выпускаются в одинаковых коробках.
Для хранения лекарств в аптеках применяются обычно так называемые выдвижные шкафы. Такие шкафы представляют собой раму или корпус, в котором с возможностью продольного перемещения подвешен выдвижной вкладыш, содержащий гофрированные полки. Такие выдвижные шкафы можно использовать только в тех аптеках, которые имеют достаточно места для установки выдвижных шкафов. Если же аптека маленькая, то лекарства должны храниться в другом месте. Соответственно возникает проблема транспортировки лекарственных средств со склада в аптеку, а также размещения новых лекарств на складе.
Классические выдвижные шкафы здесь мало приемлемы, поскольку из-за разных размеров упаковок шкафы обладают излишней массивностью. Большая внутренняя часть шкафов остается незаполненной. Кроме того, эти шкафы не могут быть использованы для автоматической выгрузки требуемых препаратов на транспортное устройство.
Из практики известен также автоматизированный складской стеллаж, в частности, применяемый в аптеках, в котором вместо выдвижных шкафов используются длинные плоские полки, на которых уложены лекарства. Хранение на таком складе происходит беспорядочно с использованием системы управления, В систему управления занесено место нахождения лекарства. Координатами являются номер полки и расстояние в метрах от контрольной точки, которой является обычно первая полка. Эти данные передаются механизму для обслуживания полок, который передвигается вдоль полок и в соответствии с заданными данными находит нужное лекарство и вынимает его с помощью вакуумного захвата.
Применение таких стеллажей на практике выявило ряд существенных недостатков. Бывает, что коробки закрыты недостаточно плотно. При вытягивании такой коробки вакуумный захват может открыть язычок упаковки, что не гарантирует правильное перемещение лекарства.
Если изгибный фальц язычка находится сверху, упаковка может попасть в щель между автоматом и полкой под наклоном, и содержимое может высыпаться на пол.
Если изгибный фальц язычка находится сбоку, то при вытягивании упаковка может перемещаться в перекошенном положении и будет тогда задевать соседние лекарства. Поскольку они также лежат на плоской полке свободно, то их позиция нарушится. При последующей попытке захватить соседнюю упаковку с ее нарушенной позиции вакуумные захваты не смогут правильно захватить ее. Угол наклона не должен для этого превышать 5-10 градусов. В противном случае захваты не смогут захватить упаковку.
Если известная система дает сбой, то механизм для обслуживания полок должен быть приведен в конечное положение и работник аптеки должен будет выполнить те действия, которые обычно выполняет механизм для обслуживания полок, чтобы по указанным координатам извлечь упаковки из стеллажа. При этом имеется еще одна опасность случайно задеть соседние предметы и при этом сдвинуть из их позиции. Тогда при запуске автоматического режима нужно будет заносить в автоматическую систему новые данные каждого предмета, сдвинутого из заданного положения.
Еще одной проблемой при вакуумном захвате являются различные размеры упаковок, а также их различный вес, который может варьироваться от нескольких граммов до полкилограмма.
В известной системе, кроме того, пространственная глубина полки, рассчитанная для укладывания наибольшей допустимой упаковки, не может быть использована для последовательного размещения небольших упаковок, потому что упаковки из второго ряда практически недоступны. Впрочем, известная система для этого и не приспособлена.
Исходя из вышесказанного, задачей изобретения является создание складского стеллажа, позволяющего пространственно экономично укладывать большое количество предметов и дающего безупречный доступ к упаковкам различных размеров.
Эта задача согласно изобретению решается посредством складского стеллажа, обладающего признаками пункта 1 формулы изобретения.
В новом складском стеллаже отдельные предметы лежат не непосредственно на полках стеллажа, а для них предусмотрены полки, в которых продукты лежат в специальных лотках. Эти лотки оснащены направляющими, с помощью которых они безупречно и позиционированно могут удерживаться в полке.
Такая конструкция обеспечивает легкий доступ к продукту и делает ненужным применение вакуумных захватов, внедряющихся в стеллаж и создающих там проблемы.
Даже если в новом складском стеллаже, пригодном для автоматизированного процесса, возникают неполадки и требуется выгрузка вручную, то не возникает опасности сместить хранящиеся рядом продукты или лотки из их положения, задев их. Они прочно удерживаются на полке и лотке, взаимодействующими друг с другом направляющими.
Еще одно преимущество применения лотков состоит в том, что используется вся глубина соответствующей полки, так как многочисленные предметы одного или разных размеров могут легко укладываться на лотке друг за другом и сепарироваться с помощью приводного механизма. Извлечение отдельных предметов из лотка позволяет возвращать оставшиеся на том же лотке предметы обратно на ту же полку, при этом можно полностью использовать пространственную глубину. Таким образом, возможно значительно более компактное по сравнению с уровнем техники складирование.
Устройство является очень простым, если полки распределены по группам и основания одной группы связаны друг с другом. При этом может быть достигнуто еще одно упрощение, если основания целиком переходят друг в друга.
Использование пространства в складском стеллаже будет рационально, если полки только по группам в каждом случае будут иметь различные размеры. Исходя из опыта, целесообразно использовать в новом складском стеллаже преимущественно два, максимум три различных размера полок, для того чтобы разместить предметы всех встречающихся размеров с по возможности наименьшим мертвым пространством.
Выполнение полок особенно упрощается, если они не имеют боковых ограничивающих стенок, то есть каждая полка сбоку является открытой и сразу переходит в следующую соседнюю полку.
Направляющие для лотка будут очень простыми, если направляющие построены по геометрии соответствующего основания полки. Например, основание каждой полки может содержать проходящий по всей ее длине направляющий желоб, открытый наверх. Нижняя сторона лотка сконструирована соответствующим образом, так что движение лотка возможно только в параллельном направлении вдоль этого желоба. Желоб обеспечивает благодаря наклонным стенкам автоматическую центровку в поперечном направлении. Позиционные ошибки не могут накапливаться в течение времени. Даже не точно вставленные лотки вынужденно занимают благодаря направляющим идеальное положение.
Очень простой желоб образуется, если основание представляет собой две проходящие V-образно плоские поверхности, соответственно основание образуется только этими плоскостями. Расположенные V-образно плоскости предотвращают опрокидывание лотка на основании и автоматически обеспечивают хорошую центровку, не требуя подгонки.
Также у оснований с V-образным желобом, которые не имеют горизонтально проходящих участков поверхности, основания могут переходить друг в друга, за счет чего образуется гофрированная пластина с впадинами и ребрами. Ребра являются упомянутыми границами соседних полок.
Когда полки или основания объединены в группы, и каждая группа укреплена на поперечной балке, то очень легко варьировать расстояние между основаниями, приспосабливая его к производственной необходимости.
Устранение неполадок и загрузка-разгрузка вручную упрощается, если группы полок расположены в выдвижном блоке, который расположен в корпусе стеллажа с возможностью продольного перемещения аналогично выдвижному шкафу. В случае неполадки можно вытащить конкретную проблемную полку, доступ в которую имеется со всех сторон, как это известно у выдвижных шкафов.
Ход между двумя находящимися напротив друг друга блоками стеллажей должен быть велик настолько, насколько это нужно для движения механизма для обслуживания полок. Размеры человеческого тела здесь не учитываются.
Для того чтобы избежать сползания предметов в лотках, последние снабжены с верхней стороны соответствующими направляющими. Эти направляющие могут иметь такую же конструкцию, как направляющие оснований, то есть они могут образовываться преимущественно V-образным желобом.
Если как направляющие основания, так и направляющие верхней стороны лотка имеют V-образный желобок, то лоток упрощается в уголковую планку, которая расположена на этой же полке и на которой лежат предметы. Подразумевается, что ориентировка желобка устроена таким образом, что его боковые стенки образуют с горизонталями угол 45 градусов.
Длина всех лотков в складском стеллаже одинаковая. Предпочтительно она выбрана такой, чтобы на ней умещались два, целесообразней три, продукта средней величины друг за другом. Средняя величина продукта высчитывается приблизительно из среднего значения размеров всех предметов. Для упрощения при расчете средней величины предметы с одинаковыми размерами можно учитывать только один раз. Таким образом, их число не учитывается.
Остальные усовершенствования изобретения являются предметом зависимых пунктов формулы изобретения.
На чертежах изображен пример выполнения предмета изобретения. Они показывают:
фиг.1 - складской стеллаж согласно изобретению в схематичном перспективном изображении, причем выдвижной блок частично выдвинут;
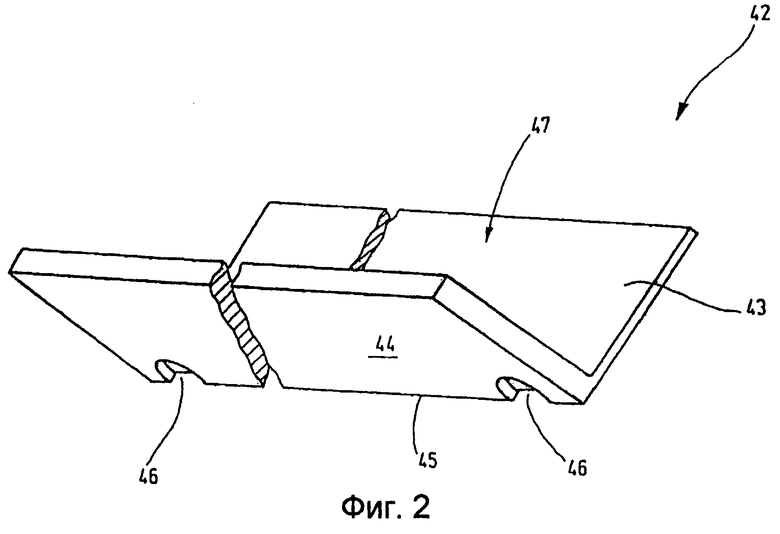
фиг.2 - один из лотков складского стеллажа, изображенного на фиг.1;
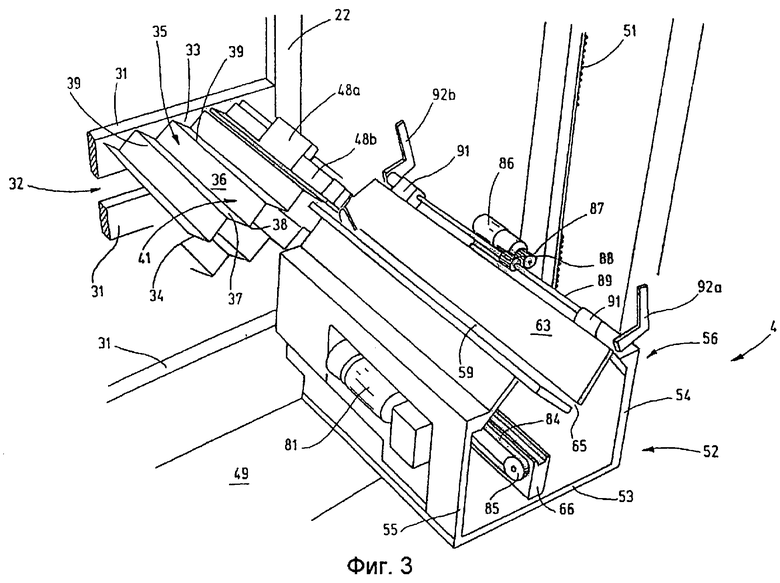
фиг.3 - механизм для обслуживания полок складского стеллажа, изображенного на фиг.1, в перспективном увеличенном изображении;
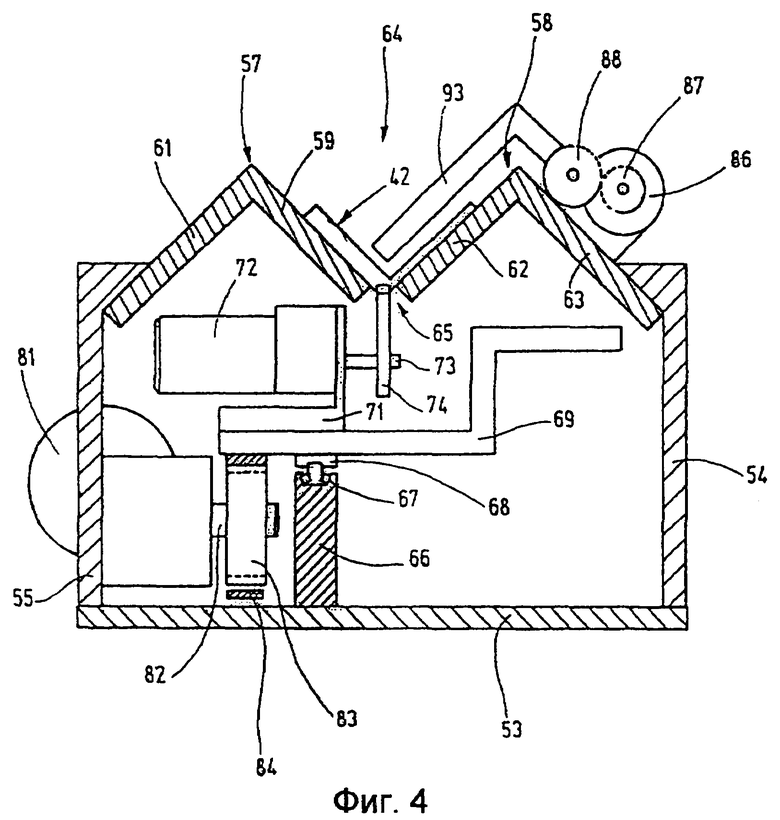
фиг.4 - механизм для обслуживания полок, изображенный на фиг.3, вид со стороны полок;
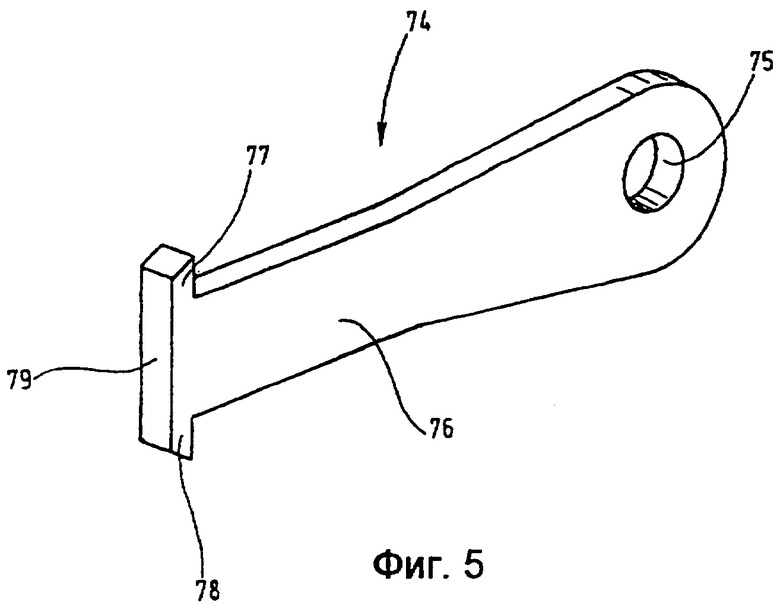
фиг.5 - палец механизма для обслуживания полок, изображенного по фиг.3 в увеличенном перспективном изображении;
Фиг. с 6 по 11 - процесс загрузки-выгрузки вручную в схематизированном, частичном представлении, причем все необязательные для понимания процесса выгрузки детали опущены.
На фиг.1 перспективно и схематически показан складской стеллаж 1. К складскому стеллажу 1 относятся два находящиеся напротив друг друга стеллажных блока 2а и 2b, широкие стороны которых противоположны друг другу и находятся на расстоянии друг от друга, при этом в пространстве между обоими стеллажными блоками 2а и 2b находятся две вертикальных стойки 3а и 3b, на которых вертикально укреплен механизм 4 для обслуживания полок (фиг.3).
Каждый из обоих стеллажных блоков 2 имеет форму прямоугольного параллелепипеда, причем существуют только грани этого параллелепипеда.
Блок 2b состоит из четырех вертикально укрепленных стоек 5, 6, 7 и 8, которые сверху на концах скреплены также четырьмя поперечинами 9, 11, 12 и 13 и соответствующими поперечинами снизу, из которых видны лишь 14, 15 и 16. Стойки 5-8 и поперечины 9-16 в углах скреплены винтами или приварены.
Блок 2а сконструирован аналогичным образом и имеет такие же размеры, поэтому детальное описание его отсутствует. Условные обозначения блока 2b распространяются и на блок 17b в зеркальном отражении.
В каждом из обоих несущих блоков 2а и 2b размещены с возможностью продольного перемещения два выдвижных блока 17а и 17b. Они навешены, к примеру, с помощью не показанных, но известных сферических направляющих на верхнем конце блока 2, для чего эти направляющие целесообразно разместить в районе верхних поперечин 9 и 12. Таким образом, можно видеть, что выдвижные блоки 17 аналогично блоку 17а на фиг.1 выдвигаются из блока 12 узкой стороной обоих блоков 2, обращенной к наблюдателю. Выдвижение в противоположном направлении блокируется, чтобы оба выдвижных блока 17 в задвинутом состоянии занимали определенное конечное положение в соответствующем блоке 2.
Расстояние между стойками 5 и 7 достаточно велико, для того чтобы можно было выдвинуть более узкий выдвижной блок 17.
Аналогично блоку 2 выдвижной блок 17а имеет форму прямоугольного параллелепипеда, у которого имеются только грани в форме вертикально установленных стоек 18, 19, 21, 22 и расположенные на соответствующих концах поперечины 23-29. Задние нижние поперечины выдвижного блока 17а на чертеже не видны.
Выдвижной блок 17b аналогичен выдвижному блоку 17а, поэтому детальное описание не приводится и условные обозначения элементов выдвижного блока 17а распространяются в зеркальном отображении на элементы конструкции выдвижного блока 17b.
Как показано на фиг.1, как блок 2, так и выдвижной блок 17 образуют относительно большие плоскости, которые в любой рабочей позиции параллельны друг другу. Эта плоскость, к примеру у блока 2, ограничивается стойками 7 и 8, верхней поперечиной 12, а также нижней, невидимой, поперечиной. У выдвижного блока 17 эту функцию выполняют вертикальные стойки 19, 21 и поперечины 26 и 28. Эти плоскости, как у блока 2, так и у выдвижного блока 17 обозначаются как передние стороны, а параллельные ему плоскости - задние стороны. Обе передние стороны блоков 2 расположены друг против друга, так что передние стороны выдвижных блоков 17 также находятся на некотором расстоянии друг против друга.
Между вертикальными стойками 18 и 22 каждого выдвижного блока 17 размещено горизонтально и соответственно параллельно к поперечинам 24 и 26 несколько поперечных балок 31, которые соединены с возможностью перемещения с вертикальными стойками 18 и 22. "С возможностью перемещения" означает в данном случае, что эти балки можно переставлять на любой высоте обеих вертикальных стоек 18 и 19, но при этом они должны всегда быть в горизонтальном положении.
Каждая из поперечных балок 31 несет на себе гофрированное основание 32, как это лучше всего видно на разрезе фиг.3. Гофрированное основание представляет собой отлитую или отштампованную прямоугольную деталь из листового металла с задней или обратной кромкой 33 и параллельной к ней передней кромкой 34. Задней кромкой 33 гофрированное основание 32 приваривается к соответствующей поперечной балке 31. От нее оно свободно выступает в направлении передней стороны выдвижного блока 17.
Каждое из гофрированных оснований 32 имеет одинаковую пространственную глубину, измеренную перпендикулярно передней стороне соответствующего выдвижного блока 17, и сконструировано таким образом, что представляет собой множество проходящих параллельно друг другу желобов V-образной формы 35 с углом раскрытия 90 градусов. V-образные желоба 35 тянутся от задней кромки 33 к передней кромке 34. Они все без исключения параллельны друг другу и имеют абсолютно точно одинаковые размеры в рамках одного гофрированного основания 32. Но они могут от одного гофрированного основания 32 к другому гофрированному основанию 32 меняться в размерах, как это можно видеть на фиг.1 в части верхнего узнаваемого на ней гофрированного основания.
Каждый из V-образных желобов 35 образуется двумя плоскими поверхностями 36 и 37, которые в районе нижнего ребра 38 целиком переходят друг в друга, а в районе верхних ребер 39 - в стенки 36 и 37, находящихся по бокам соседнего желоба 35. Ребра 38 и 39 являются прямыми и расположены перпендикулярно к соответствующей поперечной балке 31.
Из нижеприведенного описания функций еще точнее будет понятно, что каждый желоб 35 являет собой собственно полку, а стенки 36 и 37 являются основанием 41 соответствующей полки.
Отдельные полки 35 переходят друг в друга в горизонтальном направлении без боковых перегородок. В вертикальном направлении они отделяются друг от друга соседним гофрированным основанием 32.
В каждой полке 35 находится лоток 42, перспективное увеличенное изображение которого в укороченной форме дано на фиг.2. Лоток 42 - это отлитая из пластмассы деталь с двумя прямыми плоскими стенками 43 и 44, проходящими по всей длине лотка 42 и имеющими постоянную толщину. Обе стенки 43 и 44 расположены под углом 90 градусов друг к другу, соединяясь друг с другом по ребру 45. Длина лотка 42 немного больше, чем глубина гофрированного основания 32, измеренная между задней кромкой 33 и передней кромкой 34.
Стенка 44 имеет большую толщину, чем стенка 43, что позволяет сделать две выемки 46, которые находятся в непосредственной близости от соседней торцевой кромки лотка 42. Положение выемки 46 и длина лотка 42 определяются с таким расчетом, что когда лоток 42 упирается в поперечную балку 31, он выемкой 46 находится выше, чем свободно выступающая передняя кромка 34 гофрированного основания 32, т.е. выступает из соответствующей полки 35.
Высота стенок 43 и 44 лотков 42 определяется таким образом, что когда они находятся внутри полки 35, с которой они связаны конструктивно, их стенки немного не доходят до обоих боковых соседних гребешков 39.
Как становится очевидным, лотки 42 принудительно перемещаются внутри полок 35 в продольном направлении и не могут опрокинуться в сторону. Движение лотков строится, исходя из геометрии основания 41 и геометрии лотка 42. Проходящие друг к другу под углом 90 градусов стенки 36 и 37, которые представляют собой основание 41, образуют одновременно направляющие для лотка 42, наружная сторона которого, образованная направленными вниз плоскостями стенок 43 и 44, приспособлена под эту геометрию.
Наружные стороны стенок 43 и 44 являются тем самым ответными направляющим полок 35 направляющими. Так как, кроме того, стенки 43 и 44 являются плоскопараллельными пластинами, каждая из которых имеет одинаковую толщину по всей поверхности за исключением выемки 46, то лоток 42 имеет на своей верхней поверхности позиционирующее средство, также образованное V-образным желобом 47, в котором размещаются предназначенные для хранения предметы 48, например упаковки с лекарствами. На фиг.3 показан один из лотков 42, в котором находятся два предмета 48а и 48b.
Так как упаковки для лекарственных препаратов имеют обычно прямоугольную форму, они могут, как показано, укладываться в лоток 42 наклонно, причем одной стороной они укладываются на верхнюю сторону одной из обеих стенок 43 или 44. При закладывании предметов 48 на хранение нужно следить за тем, чтобы все предметы 48 укладывались во всех лотках 42 одинаково. Это не даст предметам 48, выступающим за соседний верхний гребень 39, столкнуться с другими предметами 48, также выступающими за верхний гребень 39 в соседней полке 35.
Благодаря тому что верхняя сторона лотка 42 имеет V-образную форму, то предметы 48, хранящиеся в лотке 42, не меняют своего положения. Кроме того, своими продольными сторонами они ориентированы параллельно полке 35, так как за счет V-образного желоба 47 лотка 42 они удерживаются так крепко, что находящееся в желобе 47 ребро упаковки этим же желобом 47 фиксируется.
Не требуется отдельного изображения, чтобы понять, что в V-образных желобах 47 лотков 42 могут храниться и незапечатанные цилиндрические предметы, такие как флаконы или ампулы, при этом не возникает опасность, что они изменят свое местоположение или скатятся вниз из лотка 42.
При использовании показанного складского стеллажа 1 необходимо следить за тем, чтобы предметы 48 выступали над верхним краем соответствующей стенки 43 и 44 лотка, удаленной от ребра 45, не более чем на 1/3, если они лежат в лотке 42, как это показано на фиг.3.
Для использования лотков 42 и предметов 48 предусмотрен механизм 4 для обслуживания полок. Механизм 4 для обслуживания полок движется в горизонтальном направлении по траверсе 49, которая проходит вертикально между обеими стойками 3а и 3b с возможностью перемещения. Например, с помощью приводного ремня 51 траверса 49 может переставляться вертикально, в то время как механизм 4 для обслуживания полок может передвигаться горизонтально по траверсе 49 с помощью тоже не изображенных приводных устройств. Устройства такого рода известны и их не нужно изображать подробно, так как они несущественны для понимания изобретения.
На основании такой формы размещения механизма 4 для обслуживания полок он может переставляться относительно двух находящихся под прямым углом друг к другу координат и перемещается перед свободно выступающими передними краями 34 гофрированного основания 32 обоих выдвижных блоков 17а и 17b в вертикальной плоскости.
В соответствии с фиг.3 и 4 к механизму 4 для обслуживания полок относятся преимущественно трубчатый корпус 52 с днищем 53, двумя боковыми стенками 54 и 55 и верхней частью 56. Боковые стенки 54 и 55 параллельны друг другу и перпендикулярны днищу 53. Как днище 53, так и обе боковые стенки 54 и 55 в основном гладкие, в то время как верхняя часть 56 выполнена структурированной. С обоих концов трубчатый корпус 52 открыт, причем каждый лежащий в продольном направлении механизма 4 для обслуживания полок конец механизма 4 для обслуживания полок расположен напротив передней стороны соседнего выдвижного блока 17а или 17b.
Верхняя часть механизма 4 для обслуживания полок состоит, как лучше всего видно на фиг.4, из двух проходящих в продольном направлении уголковых планок 57 и 58. Уголковая планка 57 состоит из двух ребер 59 и 61, расположенных под прямым углом друг к другу, а уголковая планка 58 - из ребер 62 и 63, расположенных под прямым углом друг к другу. Ребра 61 и 63 укреплены под углом 45° к внутренней стороне обеих боковых стенок 55 и 54. Между ребрами 59 и 62 образуется еще один V-образный желоб 64, который ограничивается двумя гладкими боковыми стенками, а именно ребрами 59 и 62. Желоб 64 проходит прямо между обоими торцами механизма для обслуживания полок и открыт с каждой торцевой стороны.
Ребра 59 и 62 не стыкуются своими свободными кромками. В самом глубоком месте желоба 64 предусмотрена сквозная щель 65, благодаря которой желоб 64 открыт вниз. В этот желоб 64, как показано на фиг.4, может вставляться лоток 42, а именно так, что его нижнее ребро 45 с выемками 46 благодаря щели 65 доступно.
В корпусе 52 проходит направляющий рельс 66, который закреплен на внешней стороне днища 53. Направляющий рельс 66, который проходит по всей длине корпуса 52, имеет на внешней стороне вырезанный сзади направляющий паз 67, по которому движутся полозья 68 с помощью не показанных на чертеже роликов. Полозья 68 имеют на верхней стороне консоль 69. Консоль 69 выступает с двух сторон над полозьями 68, причем согласно фиг.4 с левой стороны на консоли 69 укреплен монтажный уголок 71. Монтажный уголок 71 служит для установки приводного двигателя 72, приводной выходной вал 73 которого расположен под щелью 65, перпендикулярно к ее продольному направлению.
Консоль 69 выступает, кроме того, справа над полозьями 68 для того, чтобы удерживать или создавать компенсирующий вес для приводного двигателя 72. Выравнивающий вес не показан.
Приводной двигатель 72 является серводвигателем, выходной вал 73 которого может иметь определенные угловые положения. На выходном валу 73 закреплен без возможности вращения палец 74, увеличенное изображение которого дается на фиг.5. Палец 74 снабжен просверленным отверстием 75 для насадки выходного вала 73. Средства для прочной насадки не показаны, так как это несущественно для понимания изобретения.
От отверстия 75 палец 74 переходит в рычаг 76, на свободном конце которого образованы два крючка 77 и 78. Оба крючка 77 и 78 находятся противоположно друг другу относительно плоскости, в которой вертикально расположена ось отверстия 75. Между обоими крючками 77 и 78 расположена плоская поверхность 79. С помощью крючков 77 и 78 лоток 42 с предметами 48 движется в желобе 64, как это далее будет описано более детально.
Для того чтобы передвигать консоль 69 вдоль направляющего рельса 66 в определенные позиции, предусмотрен еще один приводной двигатель 81, который также является серводвигателем. Его выходной вал 82 расположен параллельно валу 73 и под прямым углом к направляющему рельсу 66.
На выходном валу 82 жестко укреплен шкив 83 приводного ремня, который служит для привода бесконечного зубчатого ремня 84, рабочая ветвь которого видна между шкивом 83 и нижней частью консоли 69. Бесконечный зубчатый ремень 84 движется по двум шкивам 85 в форме свободных роликов, которые свободно укреплены у концов направляющего рельса 66 с возможностью вращения. Имеются также приспособления для натяжения бесконечного зубчатого ремня 84, но они не изображены на чертеже и не видны на фиг.3, так как их закрывает боковая стенка 55.
В одном месте зубчатый ремень 84 жестко соединен с нижней частью консоли 69. Когда серводвигатель 81 начинает работать, то консоль 69, а с ней и палец 74 движутся вдоль щели 65 через шкив 83 зубчатого ремня и зубчатый ремень 84.
Для синхронной работы обоих серводвигателей 72 и 81 предусмотрены известного рода компенсирующие устройства, которые известным способом связаны с центральным управлением. Таким образом, центральное управление знает как точное угловое положение пальца 74, так и положение выходного вала 73 относительно осевой протяженности щели 65.
На внешней стороне ребра 63 находится еще один приводной двигатель 86, который через шестеренки 87 и 88 приводит в движение вал 89, который с возможностью вращения установлен в стойках с подшипниками 91 на внешней стороне ребра 63. С валом 89 жестко соединены два L-образных рычага 92а и 92b, ребра которых 93а и 93b служат как держатели. Держатель 93 может быть направлен вверх, как показано на фиг.3, или, как показано на фиг.4, утоплен в желоб 47, образованный лотком 42, причем в этой позиции имеется достаточный зазор между держателем и обеими стенками 43 и 44.
Держатели 93 находятся непосредственно рядом с торцами желоба 64, для того чтобы иметь возможность выборочно запирать желоб 64 с обоих концов. Расстояние между держателями 93 немного больше, чем длина лотка 42.
Так как палец 74 может передвигаться с помощью направляющего рельса 66 к обоим концам щели 65, то возможна симметричная работа с точки зрения функции, то есть механизм 4 для обслуживания полок может аналогичным образом обслуживать как полки 35 выдвижного блока 17а, так и полки 35 выдвижного блока 17b, а именно на любой высоте.
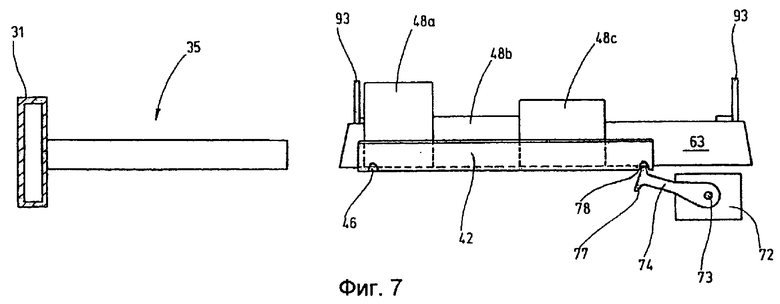
Подробное описание принципа работы нового складского стеллажа дается на основании фиг.6-11. На фиг.6-11 схематически изображены только те детали конструкции, которые необходимы для понимания принципа действия.
На фиг. с 6 по 11 показан в качестве примера один из желобов или одна из полок 35, которая закреплена на поперечной балке 31. От полки 35, к примеру, видна стенка 37. В желобе или полке 35 лежит лоток 42, при этом на фиг.6 видна нижняя или задняя стенка 44 с выемкой 46, которая выступает за переднюю кромку 34. На фиг.6 справа от полки 35 изображен в разрезе желоб 64 приводного механизма, а именно вид на верхнюю или внешнюю сторону ребра 63, нижняя кромка которого является ограничительной кромкой щели 65. Под ребром 63 виден в зеркальном отражении выходной вал 73 начерченного откинутым приводного двигателя 72 с жестко закрепленным на нем пальцем 74. Устройства для продольного продвижения двигателя 72 с пальцем 74, а также направляющие для них по причине очевидности не изображены.
Наконец, над ребром 63, а именно на его торцах, виден держатель 93.
В показанном складском стеллаже предметы 48 уложены хаотично. При загрузке центральное управление получает информацию о длине граней упаковки предметов 48, названии продукта или артикуле, адресе или местоположении соответствующей полки и позиции продукта на лотке 42, а также о положении наклона упаковки.
За исходную позицию для пояснения принципа действия принимается, что лоток 42 находится внутри своей полки 35, причем он задвинут до упора к поперечной балке 31. К выемке 46, удаленной от поперечной балки 31, имеется свободный доступ.
В лотке 42 находятся в общей сложности три предмета 48а, 48b и 48с, которые отличаются размерами упаковки. Все продукты 48 лежат в лотке 42 с наклоном в одну сторону, как это лучше всего видно на фиг.3.
Если, к примеру, необходимо извлечь продукт 48с из показанной полки 35, механизм 4 для обслуживания полок начинает движение по команде центрального управления к указанной полке 35. Для этого траверса 49 с механизмом 4 для обслуживания полок перемещается на соответствующую высоту, а затем механизм 4 для обслуживания полок вдоль траверсы 49 подгоняется к нужной полке 35. "Подгоняется" - обозначает в данном случае, что желоб 64 механизма 4 для обслуживания полок располагается в горизонтальном положении по одной прямой с желобом, определяющим полку 35, а в вертикальном положении желоб механизма для обслуживания полок находится немного ниже желоба полки. В таком положении имеется небольшой зазор между свободно доступным торцевым краем лотка 42 и находящимся напротив торцом желоба 64.
Центральное управление, предварительно известным способом задавшее положение пальца 74, а именно необходимое угловое положение и направление движения по щели 65, дает команду приводному двигателю 81 привести в движение приводной двигатель 72 с пальцем 74 по направлению к лотку 42. Движение прекращается, когда, к примеру, показывающий на чертеже наверх крючок 77 находится под выемкой 46. Для того чтобы привести палец в такое положение, он сначала поворачивается в горизонтальное положение, когда ни один из крючков 77 или 78 не входит в щель 65. Таким образом палец 74 может беспрепятственно попадать под лоток 42.
Если палец 74 находится в правильном положении, то центральное управление дает команду ему повернуться из горизонтального положения в первое ведущее наверх положение, в котором один из крючков 77 или 78, находящихся в верхнем положении, входит в выемку 46, не поднимая при этом лоток 42. Очевидно, что крючки 77 или 78 взаимодействуют с выемкой 46 как связующее звено, для того чтобы состыковать механизм 4 для обслуживания полок с соответствующим лотком 42. Таким образом достигается положение, показанное на фиг.6.
Если далее ничего не происходит, то держатели 93 выскакивают наверх из желоба 64.
Центральное управление вновь запускает приводной двигатель 81, а именно в обратном направлении, за счет чего палец 74 с зацепленным им лотком 42 полностью движется по желобу 64 до тех пор, пока задняя кромка лотка 42, которая на фиг.6 упирается в поперечную балку 31, не зайдет за просвет левого держателя 93. Это конечное положение можно увидеть на фиг.7.
Далее центральное управление дает команду опустить держатель 93 с помощью приводного двигателя 86 в желоб 64.
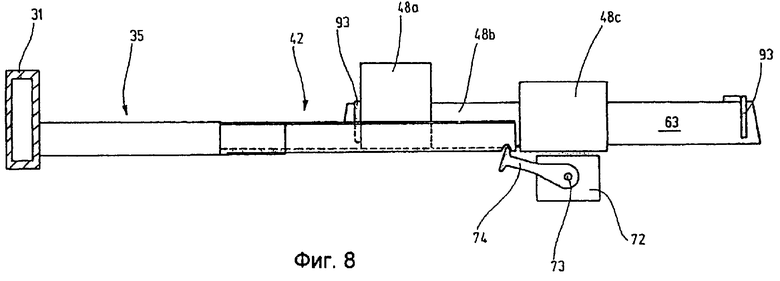
Как только держатели 93 повернуты вниз, центральное управление вновь запускает серводвигатель 81 в направлении к полке 35, из которой только что был вытянут лоток 42. Перед этим, разумеется, немного была изменена высота траверсы 49 для того, чтобы задняя кромка лотка 42 при его возвращении в полку 35 не столкнулась с передней кромкой последней. Когда лоток 42 будет с помощью серводвигателя 81 возвращаться в свою полку 35, то лежащие в нем предметы 48а, 48b и 48с не могут последовать этому движению, так как предмет 48а упирается в держатель 93. За счет продольного движения пальца 74 по направлению к полке 35 предметы 48 на лотке 42 перемещаются в сторону пальца 74. Во время движения ближайший к пальцу 74 продукт 48с первым будет падать с лотка 42 в желоб 64 механизма 4 для обслуживания полок.
Так как при загрузке предметов центральное управление получает информацию о каждом продукте, какие размеры граней имеет предмет, в какой из полок 35 хранится данный продукт и какую позицию занимает на лотке 42, то центральное управление знает, когда лоток 42 продвинулся достаточно далеко для того, чтобы с учетом погрешности предмет 48с наверняка упал вниз с лотка 42 и лежал в желобе 64.
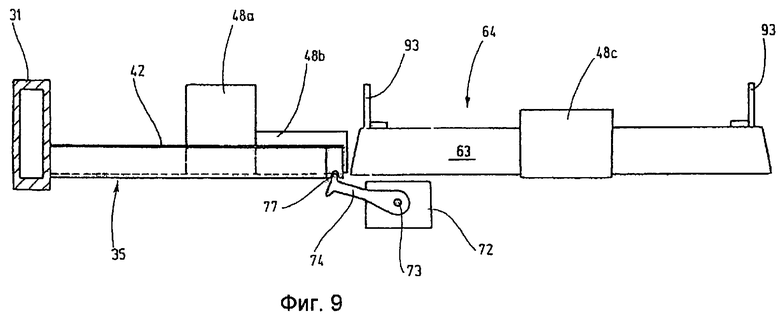
На короткое время продвижение пальца 74 прерывается для того, чтобы во время короткой паузы наверх поднялся держатель 93. Просвет предмета 48а снова свободен и лоток 42 с оставшимися на нем предметами 48а и 48b может переместиться назад на свою полку 35. Конечное положение этого движения показано на фиг.9. На полке 35 теперь опять находится принадлежащий ей лоток 42, который несет теперь только предметы 48а и 48b, в то время как продукт 48с остался лежать на механизме 4 для обслуживания полок.
Центральное управление дает команду серводвигателю 72 опустить палец 74 вниз для того, чтобы он освободился от лотка 42. Далее с помощью серводвигателя 81 палец 74 вместе со своим серводвигателем 72 приводится в правое конечное положение согласно фиг.10, причем он проходит мимо предмета 48с, находящегося под механизмом 4 для обслуживания полок. Придя в это положение или во время движения пальца 74, механизм 4 для обслуживания полок направляется к выдачному наклонному желобу 94, боковая стенка которого видна на фиг.1. Выдачной наклонный желоб 94 присоединяется к концу одного из гофрированных оснований 32 и является ведущим наружу продолжением последней боковой стенки 37, ведущей вниз.
Когда механизм 4 для обслуживания полок достигает этой точки координат, то палец 74 поднимается с помощью серводвигателя 72 наверх за предметом 48с, а именно выше, чем это необходимо для состыковки с лотком 42. Если положение для входа в отверстие 46 лотка 42 недостаточно высокое, то палец 74 проскочит мимо и не зацепит предмет 48с. Поскольку необходимо выгрузить предмет 48с с механизма 4 для обслуживания полок, палец 74 должен четко попасть в просвет желоба 64 для того, чтобы встретиться с предметом 48с.Продвигаясь дальше влево, как показывает фиг.11, предмет 48с извлекается из желоба 64, чтобы попасть через выдачной наклонный желоб 94 на ведущий дальше транспортер, который не показан.
Принцип действия всей конструкции так изображен на фигурах 6-11, как будто лоток 42 находится в левом выдвижном блоке 17а. По такому же принципу, но в зеркальном отображении может двигаться и работать лоток 42 в правом выдвижном блоке 17b. Для этого палец 74 приводится в те же положения, как это показано на фигурах 6-11, но в зеркальном отображении. Поскольку каждый лоток 42 вблизи обоих торцов снабжен двумя выемками 46, то захват лотка 42 пальцем 74 не представляет трудности и в отношении лотков правого выдвижного блока 17b, не требуя переставления пальца 74 параллельно выходному валу 73. Палец всегда находится в щели 65 в одинаковом положении, как это хорошо видно на фиг.4.
Выше было описано, как предмет 48с может попадать на выдачной наклонный желоб 94. Если необходимо достать не продукт 48с, а продукт 48а, то, отклоняясь от изображения на фиг.8, держатель 93 остается опущенным до тех пор, пока предмет 48а не окажется в желобе 64 механизма для обслуживания полок. Далее палец 74 возвращается обратно в положение, показанное на фиг.10, механизм 4 для обслуживания полок подойдет к выдачному наклонному желобу 94 и как только это место достигнуто аналогично изображению на фиг.11 с помощью пальца 74 будет продвигать лежащие друг за другом предметы 48а, 48b и 48с до тех пор, пока предмет 48а не выпадет из желоба 64 механизма 4 для обслуживания полок на выдачной наклонный желоб 94.
После того как это произошло продвижение пальца 74 останавливается. На основании размеров предметов 48а, 48b и 48с и их положения на желобе 64 вследствие фиксации держателем 93, центральное управление знает, в какой позиции находился палец 74, когда предмет 48а покинул желоб 64.
Механизм для обслуживания полок возвращается теперь обратно к полке 35, в которой находится лоток 42, с которого были извлечены предметы 48а, 48b и 48с. Механизм для обслуживания полок приводится в такое положение, когда желоб 64 находится немного выше, чем желоб 47, образованный лотком 42, а затем приостановленное продвижение вперед пальца 74 продолжается. Оставшиеся еще на механизме для обслуживания полок предметы 48b и 48с задвигаются обратно в свободный лоток 42 до тех пор, пока продукт 48с не займет положение согласно фиг.6.
Подобным образом поступают и со средним предметом 48b, когда он должен быть выгружен. В этом случае лоток 42, после того как он обратно возвращается в соответствующую полку 35, сначала еще нес бы только предмет 48а, и после выдачи продукта 48b продукт 48с, оставшийся в желобе 64, обратно возвращается в лоток 42.
Складской стеллаж 1 содержит полки 35, которые в качестве основания 41 имеют V-образный желоб. В каждом желобе 35 размещен лоток 42, который также имеет форму V-образного желоба. Механизм 4 для обслуживания полок, с помощью которого загружаются и разгружаются предметы 48, имеет в свою очередь также в верхней части V-образный желоб 64, на котором находится либо лоток 42 с предметами 48, или только один, подлежащий выдаче предмет 48. С помощью пальца 74, который может подниматься вверх через щель 65 в желобе 64 механизма 4 для обслуживания полок, лоток 42 может перемещаться туда и обратно между полкой 35 и механизмом 4 для обслуживания полок, таким же образом перемещается упаковка 48, находящаяся на механизме 4 для обслуживания полок вне лотка 42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ПОЛУЧЕНИЯ ЖЕЛЕЗНОЙ ОПРАВЫ ДЛЯ КИСТИ | 2015 |
|
RU2677899C2 |
| МАГАЗИН БЫСТРОГО ОБСЛУЖИВАНИЯ ПОКУПАТЕЛЕЙ НА АВТОМОБИЛЯХ | 2017 |
|
RU2665991C1 |
| Многоярусный стеллаж | 1979 |
|
SU796089A1 |
| УСИЛЕННЫЕ ЭЛЕМЕНТЫ ЖЕСТКОСТИ И СПОСОБ ИХ ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2514747C2 |
| Полка стеллажная для демонстрации небольших упаковок с продуктами, особенно пачек сигарет | 2020 |
|
RU2758324C2 |
| УСТРОЙСТВО ПОДАЧИ ПОТОКА НАКЛАДНОГО СТЕКЛА | 2000 |
|
RU2258048C2 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ НАПИТКА | 1999 |
|
RU2162818C1 |
| ГОРИЗОНТАЛЬНЫЙ РЕАКТОР С ПОДВИЖНЫМ СЛОЕМ (ВАРИАНТЫ) | 1998 |
|
RU2201284C2 |
| УГЛОВОЕ КРЕПЛЕНИЕ ДЛЯ ЗАКРЕПЛЕНИЯ ПРЕДМЕТОВ НА ТРАНСПОРТИРОВОЧНОМ И/ИЛИ СКЛАДСКОМ СТЕЛЛАЖЕ | 2006 |
|
RU2390485C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОВОРОТНОЙ ЛОПАТКОЙ В НАПРАВЛЯЮЩЕМ АППАРАТЕ КОМПРЕССОРА, СНАБЖЕННОЕ ЗАЖИМНЫМИ СРЕДСТВАМИ | 2003 |
|
RU2304234C2 |



Изобретение относится к области хранения предметов на стеллажах. Складской стеллаж содержит полки в виде приемных желобов. В каждом желобе расположен лоток, который также имеет форму V-образного желоба. Указанный желоб, проходящий по всей длине лотка, имеет открытые торцевые стороны. Механизм для обслуживания полок предусматривает приводной палец для захвата лотка, который имеет возможность перемещения лотка в продольном направлении, а также держатели, расположенные рядом с торцами желоба механизма для обслуживания полок и установленные с возможностью поворота в просвет открытого сверху приемного желоба лотка для взаимодействия с предметом, расположенным в этом приемном желобе при перемещении лотка в обратном направлении в сторону соответствующей полки. Изобретение позволяет обеспечить доступ к любому предмету, расположенному в лотке. 24 з.п. ф-лы, 11 ил.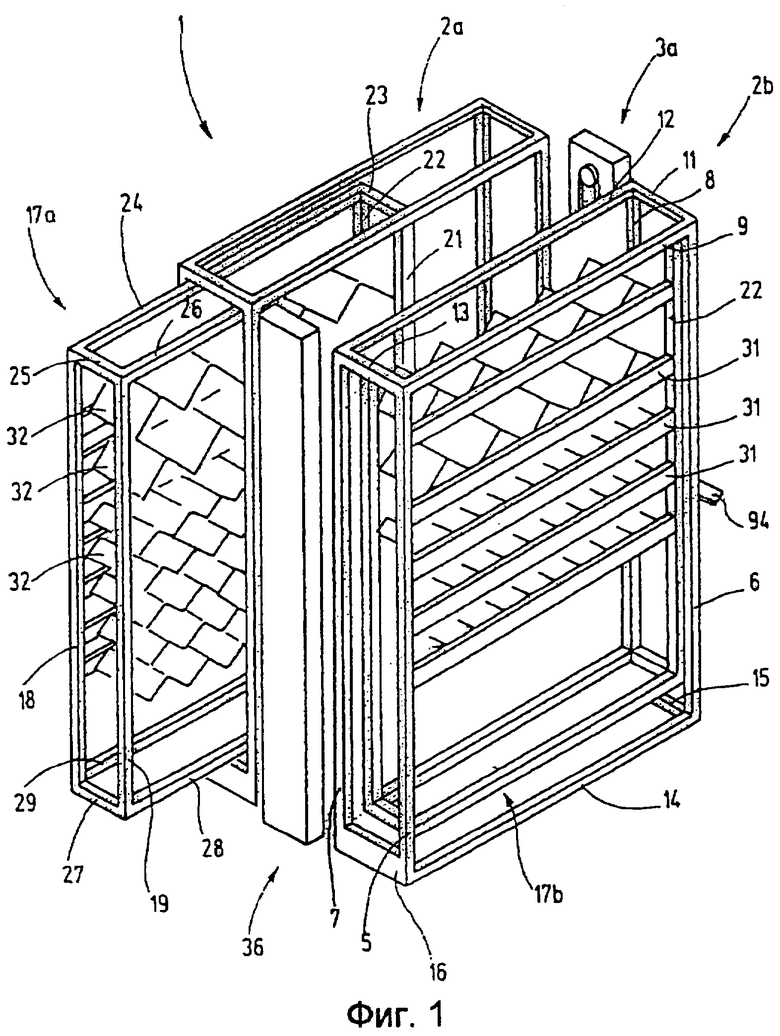
| DE 19741670 А, 25.03.1999 | |||
| Атомная станция | 1990 |
|
SU1811635A3 |
| DE 4343631 A1, 22.06.1995 | |||
| Способ механизированного комплектования изделий на поддоне | 1972 |
|
SU442067A1 |

