Предлагаемое изобретение относится к противовоздушной о бороне, в частности к ракетам с самонаведением.
Известно устройство управления зенитной ракетой (Справочник офицера противовоздушной обороны. М.: Военное издательство, 1987 (под ред. маршала авиации Зимина Г.В.), 512 С. (с.176, 191, 194). Устройство используется в системах теленаведения и самонаведения. Бортовая аппаратура управления включает координатор цели и счетно-решающий прибор. Координатор измеряет параметр рассогласования и выдает напряжение соответствующей величины и знака в счетно-решающий прибор, формирующий команду управления. С его выхода команды управления поступают на автопилот для управления рулями ракеты. Напряжение команды поступает на гиропривод устройства обработки рассогласования, управляющее положением антенны. В результате ось ОХ совмещается с направлением на цель и цель оказывается в луче антенны. Устройство формирования команд управления предназначено для выработки электрических сигналов, величина и знак которых соответствуют величине и знаку отклонения ракеты от кинематической траектории. Преобразование команд управления в радиосигналы происходит с помощью частотно-импульсного метода. В результате напряжение команды управления преобразовывается в импульсы напряжения, частота повторения которых изменяется по закону команды управления.
Недостатком известного устройства является сложность конструкции системы управления, низкое быстродействие при отслеживании быстро меняющих курс летательных аппаратов противника.
Наиболее близким техническим решением (прототипом) является "Самонаводящаяся зенитная ракета" (патент РФ 2206057, F 42 D 15/01 F 41 G 7/22). Устройство содержит корпус, четыре фотоэлектронных умножителя системы наведения, включенные в плечи электрического моста, четыре руля-подкрылка, четыре промежуточных реле, четыре электромагнита с подвижным сердечником, четыре возвратных пружины, четыре ограничителя обзора, четыре прибора ночного видения, маршевый двигатель, четыре перьевых хвостовых стабилизатора, бортовой источник электрического питания, четыре усилителя постоянного тока. Когда цель в виде летательного аппарата противника (самолет, ракета, боевой планер, разведывательный воздушный шар, самолет с противорадиолокационным покрытием) выходит за пределы оси траектории полета ракеты, свет попадает на фотоэлектронный умножитель. Изменяется ток электрического моста, который замыкает контакты промежуточного реле, через которые силовой ток подается на электромагнит с подвижным сердечником. Сердечник соединен с рулем-подкрылком. После выполнения маневра цель-тень отходит от фотоэлектронного умножителя, прекращается ток в промежуточном реле, электромагнит обесточивается и возвратная пружина устанавливает руль-подкрылок в исходное положение. Ракета движется прямолинейно на цель, поддерживаемая хвостовым стабилизатором. Аналогично работают остальные фотоумножители, которых всего четыре. Ограничитель обзора позволяет фотоэлектронному умножителю видеть только ту часть неба, на котором находится его сторона.
Недостатком прототипа является то, что устройство не реагирует на степень отклонения ракеты от цели. Это связано с тем, что после срабатывания промежуточного реле и замыкания его контактов на электромагнит подается постоянное напряжение от батареи. Величина этого напряжения не зависит от величины отклонения ракеты от цели. Это напряжение имеет строго постоянную амплитуду. По этой причине руль-подкрылок отклонится на строго постоянную величину. Поэтому как при малом отклонении ракеты от курса, так и при большом отклонении руль-подкрылок выдвигается на одинаковое расстояние от корпуса ракеты. Это может привести к тому, что при резком отклонении ракеты от цели, например при выполнении противоракетного маневра самолетом противника, ракета пролетит мимо цели, т.к. руль выдвинется на такое же расстояние, как и при небольшом отклонении от цели. Вторым недостатком противопоставляемого устройства является его относительно низкое быстродействие. Это связано с тем, что на электромагнит поступает строго постоянное напряжение от бортового источника питания. Поэтому сердечник электромагнита по инерции проходит установившееся состояние и возвращается на некоторую величину, совершая колебательные действия. Такие колебания пропорциональны массе сердечника и руля. Поэтому ракета ложится на новый курс не сразу, а спустя некоторое время, необходимое для успокоения ракеты. Иными словами, при переходе на новый курс ракета производит рыскающие движения и в это время может пройти мимо цели.
Задачей изобретения является разработка самонаводящейся ракеты.
Техническим результатом предлагаемой самонаводящейся ракеты является повышение быстродействия наведения ракеты на цель и гашение рыскающих движений ракеты при переходе на новый курс, а также повышение точности наведения и надежности поражения цели.
Технический результат достигается тем, что самонаводящаяся ракета содержит корпус, соединенный с четырьмя пружинами возврата, каждая из которых соединена с соответствующей ей рулем-подкрылком, маршевый двигатель, четыре перьевых хвостовых стабилизатора, бортовой источник питания, четыре канала управления, каждый из которых содержит фотоэлектронный умножитель, включенный в плечо электрического моста, выход которого соединен со входом усилителя постоянного тока, выход которого соединен с промежуточным реле, электромагнит, подвижный сердечник которого соединен с рулем-подкрылком, причем каждый канал управления содержит прибор ночного видения для фотоэлектронного умножителя и ограничитель обзора для фотоэлектронного умножителя, при этом в каждый из каналов управления введены аналого-импульсный преобразователь и блок управления, состоящий из сумматора, трехзвенного интегрирующего устройства, инвертора, причем выход усилителя постоянного тока соединен с входом аналого-импульсного преобразователя, выход которого через нормально разомкнутый контакт промежуточного реле соединен с одним из входов сумматора, выход которого через трехзвенное интегрирующее устройство соединен с электромагнитом и через инвертор со вторым входом сумматора.
Самонаводящаяся ракета выполнена в виде электрического демпфирующего устройства, скопированного у живой природы. Неизбежные колебательно-затухающие движения массивного сердечника и руля при быстром перемещении за счет подачи на электромагнит постоянного напряжения заменены на плавное, но быстрое выдвижение руля за счет введения демпфирующего блока управления. Сигнал управления специальной формы, вырабатываемый блоком управления, оказывает демпфирующее влияние на перемещение массивного сердечника и руля. Блок управления состоит из сумматора, охваченного отрицательной обратной связью, трехзвенного интегрирующего устройства и инвертора. Сигнал управления, вырабатываемый трехзвенным интегрирующим устройством, имеет колебательно-затухающую форму. Благодаря введению инвертора и отрицательной обратной связи этот сигнал поступает на второй вход сумматора в отрицательной полярности. Следовательно, линейный закон управления прототипа заменен на колебательно-затухающий закон управления в противофазном исполнении по отношению к траектории перемещения сердечника и руля. Поэтому движение руля происходит плавно, но с максимальным быстродействием. Таким образом, сигнал управления оказывает демпфирующее влияние на движение руля и как следствие этого существенно повышает быстродействие. Надежность наведения на цель достигается тем, что на электромагнит подается не постоянное напряжение, а напряжение, зависящее от величины отклонения ракеты от цели, вырабатываемое аналого-импульсным преобразователем. Аналого-импульсный преобразователь формирует серию импульсов, частота которых зависит от напряжения разбалансировки электрического моста, а следовательно, и от степени удаленности ракеты от цели. Таким образом, введение аналого-импульсного преобразователя позволило повысить точность наведения ракеты на цель и исключить возможность ухода цели от ракеты при выполнении противоракетных маневров.
Таким образом, совокупность существенных признаков, изложенных в формуле изобретения, позволяет достичь желаемый технический результат.
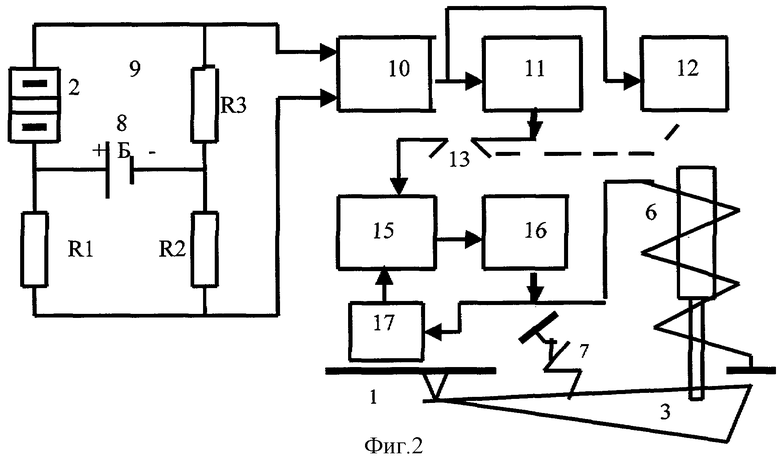
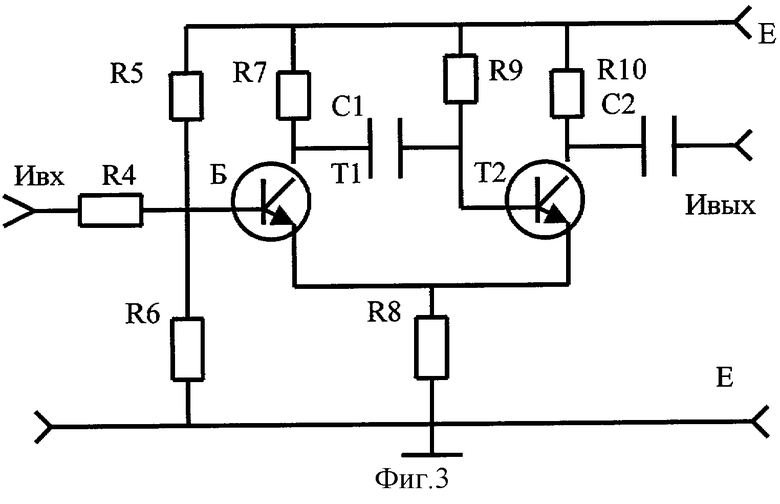
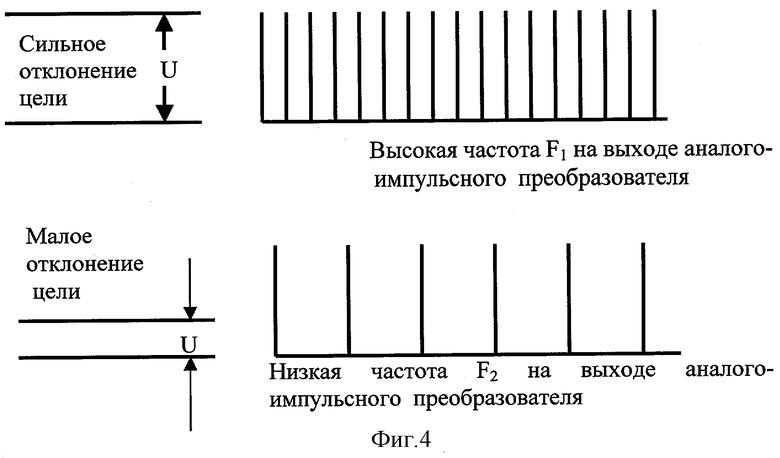
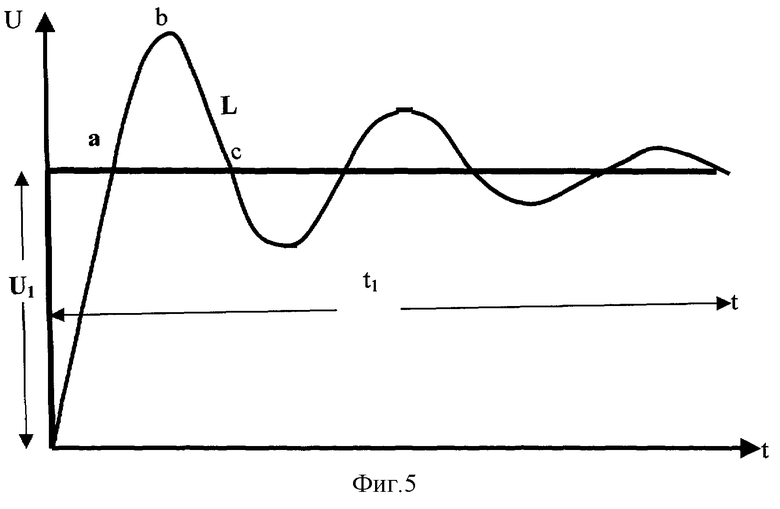
На фиг.1 схематически показано размещение основных узлов ракеты (слева - вид сбоку, справа - показана хвостовая часть ракеты); на фиг.2 представлена структурная схема бионической системы управления самонаводящейся ракетой; на фиг.3 представлена схема аналого-импульсного преобразователя; на фиг.4 показано преобразование аналогового сигнала в импульсы различной частоты; на фиг.5 показан график перемещения руля при выполнении маневра ракеты с обычным сигналом управления; на фиг.6 показан процесс демпфирования колебательных движений ракеты при выполнении маневра за счет подачи сигнала управления специальной формы; на фиг.7 показан график движения руля после демпфирования.
Устройство содержит корпус 1, четыре фотоэлектронных умножителя 2, руль-подкрылок 3, четыре прибора ночного видения 4, четыре ограничителя обзора 5 для фотоэлектронных умножителей 2, четыре электромагнита с подвижным сердечником 6, четыре пружины возврата 7, бортовой источник электропитания 8, электрический мост 9, усилитель постоянного тока 10, аналого-импульсный преобразователь 11, промежуточное реле 12, контакты промежуточного реле 13, четыре перьевых хвостовых стабилизатора 14, сумматор 15, трехзвенное интегрирующее устройство 16, инвертор 17.
В головной части корпуса ракеты 1 установлены четыре фотоэлектронных умножителя 2 между перьевыми хвостовыми стабилизаторами 14 (фиг.1 и 2). В момент отклонения ракеты от цели при маневре летательного аппарата цель попадает в поле зрения одного из четырех фотоэлектронных умножителей 2 в зависимости от направления полета цели. Происходит разбалансировка электрического моста 9 и с его диагонали снимается постоянное напряжение, пропорциональное величине отклонения цели от курса ракеты. Напряжение поступает на усилитель постоянного тока 10. Усиленное постоянное напряжение поступает одновременно на блок аналого-импульсного преобразователя 11 и промежуточного реле 12. Аналого-импульсный преобразователь 11 (фиг.3) преобразовывает аналоговое напряжение в серию импульсов (фиг.4). Причем частота посылок импульсов F пропорциональна величине постоянного напряжения, поступающего на блок аналого-импульсного преобразователя 11. После срабатывания промежуточного реле 12 импульсы поступают через замкнутые контакты 13 на первый вход сумматора 15. С выхода сумматора 15 импульсы подаются на блок 16 - трехзвенное интегрирующее устройство - в качестве накопительного элемента. В этом блоке происходит преобразование импульсных сигналов в напряжение постоянной величины и формирование сигнала управления, который по цепи обратной связи через инвертор 17 вводится на второй вход сумматора 15, замыкая канал отрицательной обратной связи. Напряжение управления нарастает по колебательно-затухающему закону.
На выходе трехзвенного интегрирующего устройства формируется сигнал с колебательно-затухающим режимом положительной полярности, который поступает на электромагнит с подвижным сердечником 6. Инвертор 17 меняет полярность этого сигнала и замыкает цепь отрицательной обратной связи.
У прототипа напряжение управления U1 имеет скачкообразную форму (фиг.5, жирная линия). Поэтому подвижный сердечник электромагнита 6 вместе с рулем-подкрылком 3 разгоняется и проходит точку остановки а и по инерции движется дальше до точки b, а затем возвращается в точку с, совершая колебательные движения, как показано на кривой L фигуры 5. Время установления стационарного состояния t1 велико.
В предлагаемом устройстве сигнал управления U2 имеет колебательно-затухающую форму (фиг.6). Причем в момент подхода руля-подкрылка 3 к установившемуся состоянию в точке b напряжение управления меняет знак на отрицательный в точке с. Поэтому инерционное движение руля-подкрылка 3 замедляется. Точка b и точка с имеют противоположные полярности. Поэтому движение руля-подкрылка 3 будет проходить по траектории, показанной на фиг.7. Время t2 движения руля подкрылка 3 будет минимальным.
Следовательно, сигнал управления специальной формы выполняет роль демпфирующего устройства, предотвращая рыскающие движения ракеты, и повышает быстродействие установления ракеты на требуемый курс.
При незначительном отклонении ракеты от цели на аналого-импульсный преобразователь 11 от фотоэлектронного умножителя 2 поступает небольшой величины напряжение. Поэтому с аналого-импульсного преобразователя 11 снимаются импульсы небольшой частоты F (фиг.4, внизу) и сигнал управления будет иметь апериодический режим. Такой сигнал плавно установит ракету на требуемый курс.
Таким образом, при небольшом отклонении ракеты от цели сигнал управления имеет апериодическую форму, а при больших отклонениях ракеты от цели во время резкого противоракетного маневра цели сигнал управления имеет колебательно-затухающую форму, что способствует быстрому повороту ракеты. В результате ракета быстро ляжет на требуемый курс и настигнет цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАВОДЯЩАЯСЯ ЗЕНИТНАЯ РАКЕТА | 2001 |
|
RU2206057C1 |
| БИОНИЧЕСКИЙ СТАБИЛИЗАТОР ДАВЛЕНИЯ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2003 |
|
RU2250487C1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| Устройство для фотопечатания | 1982 |
|
SU1030762A1 |
Изобретение относится к противовоздушной обороне, в частности к ракетам с самонаведением. Технический результат - повышение быстродействия наведения ракеты на цель. Согласно изобретению, ракета содержит корпус, соединенный с четырьмя пружинами возврата, каждая из которых соединена с соответствующей ей рулем-подкрылком, маршевый двигатель, четыре фотоэлектронных умножителя системы наведения, включенные в плечи электрического моста, четыре руля-подкрылка, соединенные через промежуточные реле с электромагнитами с подвижным сердечником, четыре прибора ночного видения для фотоэлектронных умножителей, четыре ограничителя обзора для фотоэлектронных умножителей, четыре усилителя постоянного тока для фотоэлектронных умножителей, бортовой источник электрического питания, четыре перьевых хвостовых стабилизатора, аналого-импульсный преобразователь, блок управления, состоящий из сумматора, трехзвенного интегрирующего устройства, инвертора. Причем фотоэлектронные умножители каждого из четырех каналов соединены через усилитель постоянного тока с аналого-импульсным преобразователем, промежуточным реле, сумматором, инвертором и трехзвенным интегрирующим устройством. 7 ил.
Самонаводящаяся ракета, содержащая корпус, соединенный с четырьмя пружинами возврата, каждая из которых соединена с соответствующей ей рулем-подкрылком, маршевый двигатель, четыре перьевых хвостовых стабилизатора, бортовой источник питания, четыре канала управления, каждый из которых содержит фотоэлектронный умножитель, включенный в плечо электрического моста, выход которого соединен со входом усилителя постоянного тока, выход которого соединен с промежуточным реле, электромагнит, подвижный сердечник которого соединен с рулем-подкрылком, причем каждый канал управления содержит прибор ночного видения для фотоэлектронного умножителя и ограничитель обзора для фотоэлектронного умножителя, отличающаяся тем, что в каждый из каналов управления введены аналого-импульсный преобразователь и блок управления, состоящий из сумматора, трехзвенного интегрирующего устройства, инвертора, причем выход усилителя постоянного тока соединен с входом аналого-импульсного преобразователя, выход которого через нормально разомкнутый контакт промежуточного реле соединен с одним из входов сумматора, выход которого через трехзвенное интегрирующее устройство соединен с электромагнитом и через инвертор - со вторым входом сумматора.
| САМОНАВОДЯЩАЯСЯ ЗЕНИТНАЯ РАКЕТА | 2001 |
|
RU2206057C1 |
| US 4949917 А, 21.08.1990 | |||
| US 5323987 А, 28.06.1994 | |||
| US 4318515 А, 09.03.1982 | |||
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |

