Изобретение относится к транспортному машиностроению, а более конкретно к созданию антиблокировочных тормозных систем.
Известны антиблокировочные тормозные системы, например антиблокировочная система МК II фирмы "Teves", которая осуществляет трехканальное управление и включает четыре датчика угловой скорости колес, гидравлический узел, электронный блок управления и устройство сигнализации.
Гидравлический узел образуют: гидравлический усилитель, главный тормозной цилиндр, обеспечивающий трехконтурное разделение тормозного привода, бачки для тормозной жидкости, насос с электроприводом, модуляторы с электромагнитными клапанами для впуска и выпуска жидкости.
При работе такой системы в главном тормозном цилиндре создаются циклические изменения давления, которые передаются в виде пульсаций на тормозную педаль и она, оставаясь неподвижной, информирует водителя о вступлении АБС в работу. Из сказанного видно, что она работает на "импульсном" способе торможения со всеми вытекающими отсюда недостатками. Основной, из которых низкое использование коэффициента сцепления (ϕx) в продольном направлении. Сама же конструкция сложная и дорогостоящая.
Одной из характеристик процесса торможения является время торможения. На нее, кроме величины коэффициента сцепления (ϕ), скорости начала торможения (V0) оказывают влияние составляющие времени торможения: τн - время запаздывания; τк - время нарастания замедления и τуст - время торможения при установившемся замедлении.
Время запаздывания (τc) в большей мере определяется субъективными "качествами" водителя и зазорами между отдельными деталями в узлах тормозной системы.
В это время тормозная система не работает.
Время нарастания замедления (τн) определяет начало работы тормозной системы. На увеличение этого времени оказывают влияние усилители в тормозной системе. Но вместе с тем многие АТС оборудуются усилителями. На наш взгляд это в некоторой степени справедливо применительно к импульсному способу торможения в АБС, будь-то плунжерно-поршневой способ, или способы с прямой передачей давления, или с обратным нагнетанием жидкости.
Мы предлагаем антиблокировочную тормозную систему, в контурах которой стоят главные цилиндры. В цилиндрах два поршня, между которыми стоит пружина, воздействуя на которую можно менять давление рабочего поля при постоянном объеме в статическом состоянии. В нее включены электромеханический клапан, цилиндр управления, акселерометр и ЭВМ, связанные таким образом, что позволяют фиксировать изменяющееся давление и удерживать его в контурах в процессе торможения на определенном уровне, исключающим блокировку колес.
Изобретение поясняется чертежами и схемами.
Фиг.1 - блок цилиндров с системой управления.
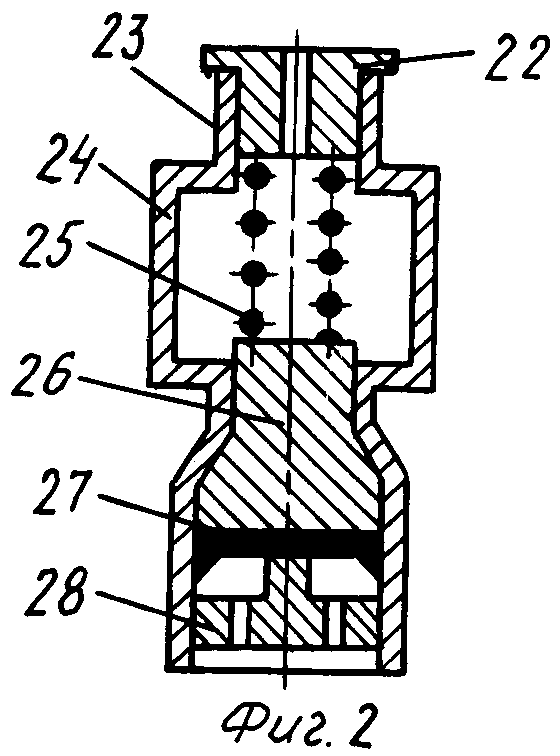
Фиг.2 - клапан запорный механический.
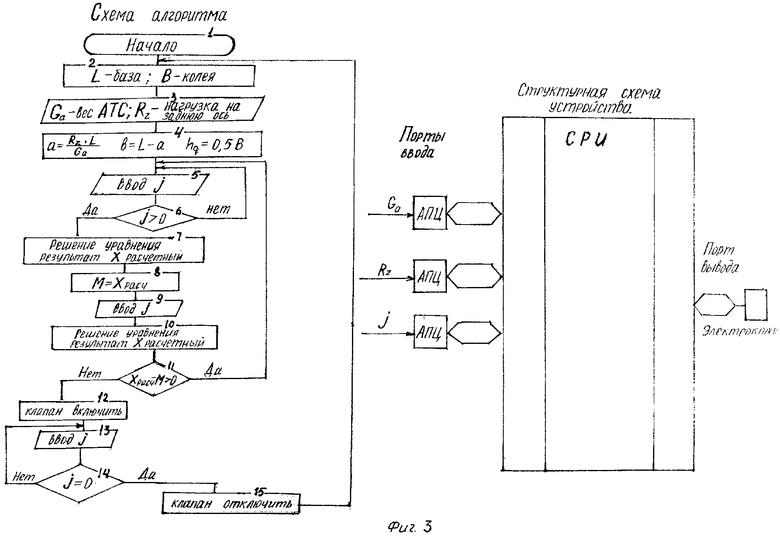
Фиг.3 - структурная схема устройства и схема алгоритма.
На чертежах порядковые номера связаны с названием следующих деталей: 1 - стойка крепления; 2 - рейка зубчатая со штоком; 3 - рычаг специального профиля; 4 - поршень с уплотнением; 5 - цилиндр управления; 6 - пружина; 7 - клапан электромеханический; 8 - емкость для жидкости; 9 - запорный клапан; 10 - трубопровод контура тормозного привода; 11 и 21 - главные цилиндры контуров; 12 - поршень с уплотнением; 13 - пружина; 14 - поршень вспомогательный; 15 - шток; 16 - ось ролика; 17 - ролик; 18 - вал приводной; 19 - шестерня (сектор) рычажного механизма; 20 - корпус блока цилиндров; 22 - пробка с резьбой; 23 - горловина с резьбой; 24 - корпус запорного клапана; 25 - пружина; 26 - направляющая с манжетой; 27 - манжета; 28 - пробка-упор с резьбой. F - усилие на педали; Руд - давление в контурах.
Связь между рейкой со штоком 2, поршнем 4 с уплотнением и пружины 6 с поршнем с уплотнением 4 контактная. Такая же связь между штоком 15, поршнем 4 и пружиной 13.
Суть изобретения в том, что быстродействующая антиблокировочная тормозная система отличается тем, что позволяет исключить из гидравлического блока: усилители, насосы с электроприводом, гидроаккумуляторы, модуляторы с клапанами, электромагнитные клапаны, клапаны для перевода статических цепей контуров в динамические цепи, а использовать подобранные по площади поршни в главных тормозных цилиндрах и цилиндры управления, которые по командам ЭВМ ограничивают и удерживают давление в контурах на необходимом уровне, обеспечивая торможение.
Предлагаемая тормозная система работает в зависимости от изменяющейся величины замедления в процессе торможения с использованием диаграммы ϕ - S.
Наличие пружины 13 между поршнями 12 и 14 позволяет изменять состояние рабочего тела в замкнутом объеме по формуле

где Руд - давление рабочего тела в процессе торможения в контуре; Х - величина сжатия пружины 13; С - жесткость пружины 13; S - площадь поршня 12 в главном цилиндре 11.
Связь величины Х с параметрами транспортного средства и дорожными условиями определяются математической моделью колеса в тормозном режиме (здесь и далее рассматривается одно колесо, один главный тормозной цилиндр, один контур и т.д., так как аналогичные процессы идут и для других колес, меняются только координаты центра тяжести, нагрузки на колеса и профиль рычага 3).
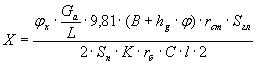
зависимость относится к колесу передней оси, где ϕx=j/q, a j - линейное замедление АТС; q - ускорение свободно падающего тела; Ga - масса, приходящаяся на колесо; L - база транспортного средства; В - координата центра тяжести от оси задних колес; hg - вертикальная координата центра тяжести; rст - радиус статический для переднего колеса; Sгл - площадь поршня 12 цилиндра 11; Sn - площадь поршня рабочего цилиндра тормозного механизма; K - коэффициент трения контртел; rб - радиус барабана тормозного механизма; С - жесткость пружины в главном цилиндре контура передних колес; l - внутреннее передаточное число в тормозном механизме.
Первая двойка учитывает число площадей в цилиндре 1, вторая - распределяет осевую нагрузку на колеса.
Обратимся к исходной формуле Руд·S=Х·С, из нее видно, что быстродействие тормозной системы в значительной мере, кроме других факторов, зависит от величины X. Прикладывая усилие на педаль (F), мы сжимаем пружину на эту величину и чем больше величина X, тем больше время τн.
Теоретические подсчеты показали: чтобы поднять удельное давление до 58,8 кгс/см2 в контуре для передних колес автомобиля М - 2140 при его полной массе 1480 кг при торможении на дороге с коэффициентом ϕ=0,7 при жесткости пружины С=30 кгс/см и площади поршня 4,44 см2, надо пружину сжать на 8,7 см (58,8=(8,7·30)/4,44).
Если уменьшить площадь поршня в 2 раза, т.е. до 2,22, тогда следует уменьшить и Х в 2 раза, т.е. до 4,35.
Исполним расчет по правилам арифметики получим тот же результат (58,8=(4,35·30)/2,22).
Обратимся к критериям оценки эффективности торможения, одним из которых является время торможения (Т) и ее составляющая τн - время нарастания замедления. Если воспользоваться данными, приведенными в учебном пособии "Автоматизация агрегатов и систем автомобиля. Тормозное управление". М., 1996, МАДИ (ТУ), авторы: Юрчевский А.А., Еникеев Б.Ф., Попов А.И., то можно найти, что при обычном гидровакуумном усилении тормозная система автомобиля "Волга" обеспечивает время нарастания замедления τн=0,2÷0,25 с.
Воспользуемся этой величиной и применим ее к тормозной системе М-2140 и будем считать все другие факторы, влияющие на время τн - одинаковые, а изменяется только ход (X) сжатия пружины. Поскольку ход (X) уменьшился в 2 раза, то и время τн уменьшится в два раза и станет τн=(0,1÷0,125) с. Уменьшив площадь поршня в три раза, уменьшим ход поршня в три раза. Ход станет Х=2,9 см, а время τн=(0,07÷0,08) с.
Проведя такие операции десять раз, мы получим таблицу
Из таблицы следует, что усилие на педали снизилось до 26 кгс, а время до τн=(0,02÷0,025)c.
Изменяя площадь поршня цилиндра, можно изменять и жесткость пружины, добиваясь наиболее выгодных величин жесткости и хода сжатия пружины.
Воспользуемся формулой теоретического определения тормозного пути (Sm) с использованием тормозной диаграммы полного экстренного торможения:

где V0 - скорость начала торможения, V0=80 км/ч=22,2 м/с;
jуст - установившееся замедление при торможении jуст=ϕ·9,81, при ϕ=0,7, jуст=6,867 м/с2.
При торможении штатной тормозной системой τc=0,11 c, a τн=0,225 c, при предлагаемой тормозной системой время τс=0,11 с, а τн=0,075 с. Подставив приведенные данные получим тормозной путь  при штатной тормозной системе
при штатной тормозной системе  а при предлагаемой системе тормозной путь
а при предлагаемой системе тормозной путь  будет равен
будет равен  Разница
Разница 
Работа предлагаемой тормозной системы.
В процессе торможения за время запаздывания (τс) - торможения еще нет, так как реакция водителя, зазоры между взаимодействующими деталями, позволяют в некоторой мере меняться объему, но как только зазоры будут выбраны, объем замкнется и наступит время нарастания замедления.
В силу сказанного выше, это время может быть очень малым и наступит время τуст, но учитывая быстродействие ЭВМ, когда операции в ЭВМ совершаются за миллионные доли секунды, срабатывание электромеханического клапана 7 в цилиндре управления 5 наступит раньше и блокировки колес не будет.
При больших скоростях движения ЭВМ должна быть включена.
а) Служебное торможение
При таком торможении усилие на педали и темп его нарастания не высокий. Штатный акселерометр фиксирует возникшее замедление и величина его поступает в ЭВМ. Начинается работа ЭВМ. При малом замедлении коэффициент скольжения S и соответствующий ему коэффициент сцепления мал и будет изменяться в пределах от нуля до величин, соответствующих зоне перегиба по кривой диаграммы ϕ - S, меньших ϕmax с определенной погрешностью.
Для удобства, будем рассматривать колеса одной оси, например передней оси.
На поступающие величины замедления при торможении ЭВМ будет выдавать расчетные значения X1расч=M и фиксировать в памяти. При поступлении других возросших значений Х2расч ЭВМ должна сравнить их по зависимости  и пока будет выдерживаться это неравенство ЭВМ команды на закрытие клапана 17 подавать не будет. Идет служебное торможение.
и пока будет выдерживаться это неравенство ЭВМ команды на закрытие клапана 17 подавать не будет. Идет служебное торможение.
Дальше наступит такой момент, когда коэффициент сцепления ϕх достигнет почти максимальной величины (точка перегиба кривой ϕ по диаграмме ϕ-S) и соответственно линейное замедление (j) достигнет максимума. Начнется экстренное (аварийное) торможение.
Экстренное (аварийное) торможение.
При достижении равенства с некоторой погрешностью  ЭВМ подаст команду на замыкание контактов клапана 7. Клапан перекроет проход жидкости из цилиндра 11 в емкость 8. Объем жидкости в цилиндре замкнется и штоки 15 и 1 остановятся. Торможение будет идти при максимально допустимом замедлении или до полной остановки АТС или с каким-то замедлением для служебного торможения.
ЭВМ подаст команду на замыкание контактов клапана 7. Клапан перекроет проход жидкости из цилиндра 11 в емкость 8. Объем жидкости в цилиндре замкнется и штоки 15 и 1 остановятся. Торможение будет идти при максимально допустимом замедлении или до полной остановки АТС или с каким-то замедлением для служебного торможения.
При аварийном торможении, когда величины Храсч и Руд достигли экстремальных значений, возможна блокировка колес, так как торможение идет на грани блокирования колес. Этого допускать нельзя. Для этого в процессе теоретических расчетов следует предусмотреть в тормозном механизме уменьшенные размеры радиусов барабанов колес или диаметров рабочих цилиндров. Эти величины входят в значения тормозного момента на барабане и позволяют выполнить неравенство Mб<Мк и таким образом исключить блокировку колес. При этом можно задаться допустимыми величинами ϕx и ϕy.
Контактная связь между поршнем-упором 4, пружиной 6 и штоком 2 делает механизм управления предлагаемой тормозной системы таким, что при любой неисправности в электронном блоке тормозная система способна обеспечивать процесс торможения обычным способом. Кроме того, предлагаемая тормозная система позволяет максимально использовать коэффициент сцепления, будь он большим или малым.
Как известно, коэффициент продольного сцепления ϕx меняется от покрытий, их состояния, от изношенности протектора шин, от скорости движения, от толщины водяной пленки в контакте колеса, от различных углов бокового увода, но характерной чертой этих зависимостей является то, что максимум их значений приходится на величину коэффициента скольжения (S) в зоне S=0,15÷0,25. Эта особенность делает предлагаемую тормозную систему максимально универсальной.
Изобретение относится к транспортному машиностроению, а именно к антиблокировочным тормозным системам транспортных средств. Антиблокировочная тормозная система содержит главные цилиндры контуров, каждый из которых содержит вспомогательный поршень, пружину, расположенную между вспомогательным поршнем и поршнем с уплотнением, а также электромеханический клапан, связанный с цилиндром управления и выполненный с возможностью перекрытия подачи жидкости из главного цилиндра соответствующего контура. Также антиблокировочная тормозная система содержит акселерометр, выполненный с возможностью фиксации изменения замедления процесса торможения, связанный с ЭВМ, которая связана с цилиндром управления, а площади поршней в главных цилиндрах контуров и цилиндре управления подобранные таким образом, что обеспечивают возможность цилиндру управления ограничивать давление в контурах в процессе торможения на определенном уровне. Техническим результатом является улучшение технических характеристик антиблокировочной тормозной системы. 3 ил.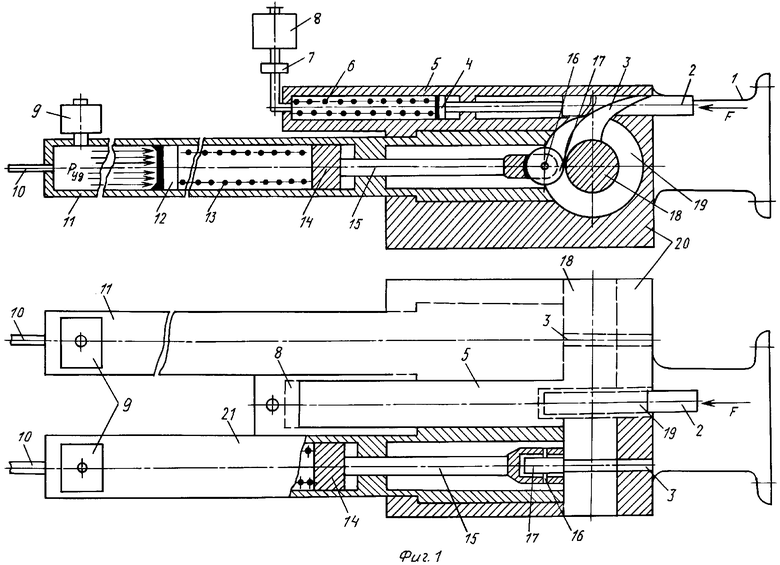
Антиблокировочная тормозная система автотранспортного средства, содержащая главные цилиндры контуров, каждый из которых содержит вспомогательный поршень, пружину, расположенную между вспомогательным поршнем и поршнем с уплотнением, а также электромеханический клапан, связанный с цилиндром управления и выполненный с возможностью перекрытия подачи жидкости из главного цилиндра соответствующего контура, отличающаяся тем, что она содержит акселерометр, выполненный с возможностью фиксации изменения замедления процесса торможения, связанный с ЭВМ, которая связана с цилиндром управления, а площади поршней в главных цилиндрах контуров и цилиндре управления подобранны таким образом, что обеспечивают возможность цилиндру управления ограничивать давление в контурах в процессе торможения на определенном уровне.
| Гидравлическая антиблокировочная тормозная система для транспортных средств | 1986 |
|
SU1484290A3 |
| Гидравлическая антиблокировочная тормозная система транспортного средства | 1985 |
|
SU1449003A3 |
| Антиблокировочная тормозная система колеса транспортного средства | 1987 |
|
SU1463577A1 |
| СПОСОБ УСТРАНЕНИЯ ЗАГРЯЗНЕНИЯ ВОДЫ И ПОЧВЫ МАСЛОМ И МАСЛЯНЫЙ АДСОРБЕР | 1992 |
|
RU2069640C1 |

