Настоящее изобретение относится к робототехническому чистящему устройству и способу его работы и, более конкретно, к робототехническому чистящему устройству и способу его работы, обеспечивающим возможность повышения эффективности чистки путем регулирования всасывающей силы в зависимости от расстояния между чистящим устройством и полом.
В широком смысле робототехническое чистящее устройство представляет собой устройство, которое автоматически обнаруживает зону чистки, препятствие или т.п. без участия пользователя, выполняет чистку в процессе автоматического перемещения, автоматически перемещается к зарядной станции для зарядки, когда аккумуляторная батарея разряжается, и возвращается в зону чистки, когда зарядка будет завершена, для выполнения чистки.
Обычное робототехническое чистящее устройство содержит всасывающее устройство, предназначенное для всасывания грязи, находящейся на полу, ведущее колесо, соединенное с приводным электродвигателем и предназначенное для обеспечения перемещения робототехнического чистящего устройства, навигационный датчик, предназначенный для определения положения чистящего устройства и положения препятствия или т.п., и управляющее устройство, предназначенное для автоматического управления чистящим устройством. Робототехническое чистящее устройство выполняет операцию чистки путем перемещения по заданной траектории, и кодовый датчик, соединенный с ведущим колесом, определяет положение ведущего колеса при вращении, чтобы тем самым задать положение чистящего устройства при перемещении.
Тем не менее, обычное робототехническое чистящее устройство имеет следующие недостатки.
Обычное робототехническое чистящее устройство всасывает грязь с одинаковой всасывающей силой во время операции чистки. По этой причине грязь не может быть всосана должным образом на вогнутом участке, где расстояние между нижней частью чистящего устройства и самой грязью относительно большое. Кроме того, избыточная всасывающая сила, которая превышает нужную всасывающую силу, будет приложена на выпуклом участке, где расстояние между нижней частью чистящего устройства и самой грязью сравнительное небольшое, в результате чего снижается эффективность работы чистящего устройства.
Следовательно, техническая задача настоящего изобретения заключается в создании робототехнического чистящего устройства и способа чистки с его помощью, обеспечивающих возможность повышения эффективности чистки путем регулирования всасывающей силы, необходимой для всасывания грязи, находящейся на полу, в зависимости от расстояния между чистящим устройством и полом.
Для решения этой задачи в соответствии с настоящим изобретением разработано робототехническое чистящее устройство, содержащее всасывающее устройство, смонтированное в корпусе чистящего устройства и предназначенное для всасывания грязи, находящейся на полу; приводное устройство, предназначенное для обеспечения перемещения корпуса чистящего устройства; детекторное устройство, установленное в корпусе чистящего устройства и предназначенное для определения расстояния между днищем корпуса чистящего устройства и полом; и управляющее устройство, управляющее всасывающим устройством по сигналу от детекторного устройства для регулирования всасывающей силы всасывающего устройства в зависимости от расстояния между днищем корпуса чистящего устройства и полом.
Предпочтительно детекторное устройство содержит колесо, установленное на днище корпуса устройства с возможностью ввода данного колеса в контакт с полом и с возможностью смещения в вертикальном направлении в зависимости от неровности пола; и измерительное устройство, предназначенное для определения величины смещения колеса в вертикальном направлении.
Предпочтительно измерительное устройство содержит соединительное звено, шарнирно соединенное с осью вращения колеса и соединенное с возможностью поворота с осью поворота, зафиксированной в корпусе чистящего устройства, для обеспечения возможности поворота относительно оси поворота при смещении колеса в вертикальном направлении; поворачивающуюся пластину, установленную на одном конце соединительного звена и имеющую прорези, образованные в том направлении, в котором поворачивается соединительное звено; и оптический датчик, включающий излучатель света, предназначенный для излучения света в направлении поворачивающейся пластины, и приемник световых лучей, предназначенный для приема световых лучей, проходящих через прорезь поворачивающейся пластины.
Предпочтительно на соединительном звене смонтирован упругий элемент, один конец которого прикреплен к корпусу чистящего устройства и обеспечивает приложение упругой силы к соединительному звену.
Предпочтительно детекторное устройство установлено перед всасывающей головкой всасывающего устройства по направлению перемещения корпуса чистящего устройства.
Техническая задача также решается за счет того, что создано робототехническое чистящее устройство, содержащее всасывающее устройство, предусмотренное в корпусе чистящего устройства и предназначенное для всасывания грязи, находящейся на полу; ведущее колесо, смонтированное в корпусе чистящего устройства и приводимое во вращение посредством приводного двигателя для обеспечения перемещения корпуса чистящего устройства; по меньшей мере, одно вспомогательное колесо, установленное у нижней части корпуса чистящего устройства, служащее опорой корпусу чистящего устройства на полу в положении, когда вспомогательное колесо находится в контакте с полом, и приводимое во вращение за счет перемещения корпуса чистящего устройства; и детекторное устройство, предназначенное для определения величины смещения вспомогательного колеса в вертикальном направлении.
Предпочтительно детекторное устройство содержит соединительное звено, шарнирно соединенное с осью вращения вспомогательного колеса и соединенное с возможностью поворота с корпусом чистящего устройства для обеспечения возможности поворота в соответствии с неровностью пола; и измерительное устройство, предназначенное для определения величины поворота соединительного звена.
Предпочтительно измерительное устройство включает в себя: поворачивающуюся пластину, установленную на одном конце соединительного звена и имеющую прорези; и оптический датчик, включающий излучатель света, предназначенный для излучения света, и приемник световых лучей, предназначенный для приема световых лучей, проходящих через прорезь поворачивающейся пластины.
Предпочтительно детекторное устройство установлено перед всасывающей головкой всасывающего устройства по направлению перемещения корпуса чистящего устройства.
Предпочтительно робототехническое чистящее устройство дополнительно включает упругий элемент, выполненный с возможностью приложения упругой силы к вспомогательному колесу.
Техническая задача также решается за счет того, что разработан способ чистки с помощью робототехнического чистящего устройства, при котором на первом этапе выполняют чистку за счет автоматического перемещения и всасывания грязи, находящейся на полу; на втором этапе определяют расстояние между днищем чистящего устройства и полом; и на третьем этапе осуществляют регулирование всасывающей силы для всасывания грязи, находящейся на полу, в зависимости от расстояния между нижней частью чистящего устройства и полом.
Предпочтительно на втором этапе выполняют измерение вертикального смещения колеса, которое установлено на днище чистящего устройства, приводится во вращение за счет перемещения чистящего устройства и смещается в вертикальном направлении в соответствии с неровностью пола.
Предпочтительно на третьем этапе увеличивают всасывающую силу при увеличении расстояния между днищем чистящего устройства и полом и уменьшают всасывающую силу при уменьшении расстояния между днищем чистящего устройства и полом.
Вышеуказанные признаки, особенности и преимущества настоящего изобретения станут более понятны из нижеприведенного подробного описания настоящего изобретения при рассмотрении его совместно с прилагаемыми чертежами.
Прилагаемые чертежи, которые включены для обеспечения лучшего понимания изобретения и составляют часть данного описания, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для разъяснения принципов изобретения.
На чертежах:
фиг.1 - изображение, показывающее переднюю сторону робототехнического чистящего устройства в соответствии с настоящим изобретением;
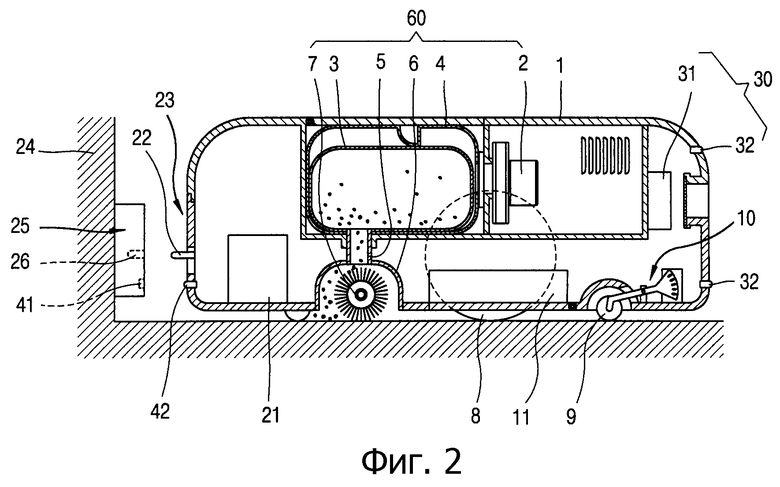
фиг.2 - продольное сечение, показывающее робототехническое чистящее устройство в соответствии с настоящим изобретением;
фиг.3 - изображение, показывающее днище робототехнического чистящего устройства в соответствии с настоящим изобретением;
фиг.4 - местный разрез, показывающий детекторное устройство, имеющееся в робототехническом чистящем устройстве в соответствии с настоящим изобретением;
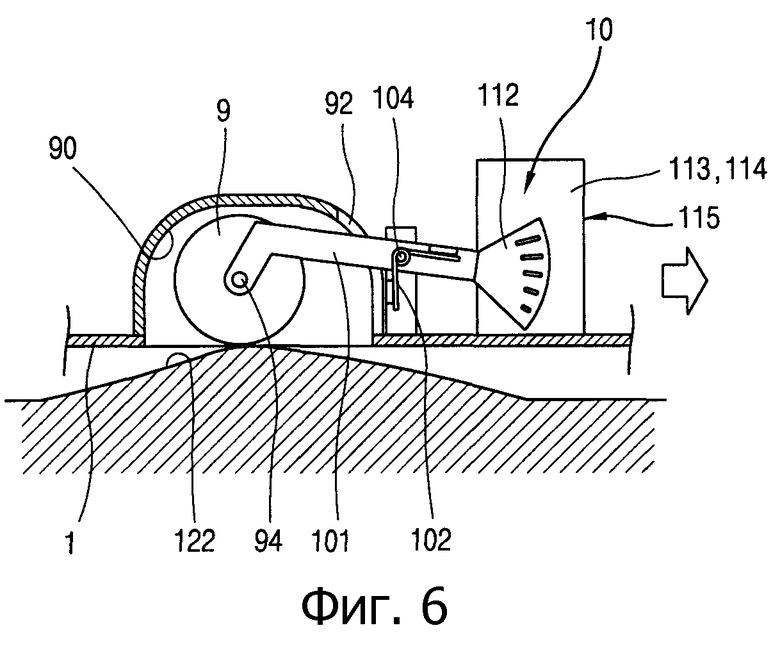
фиг.5 и 6 - изображения, показывающие рабочие состояния детекторного устройства, имеющегося в робототехническом чистящем устройстве в соответствии с настоящим изобретением;
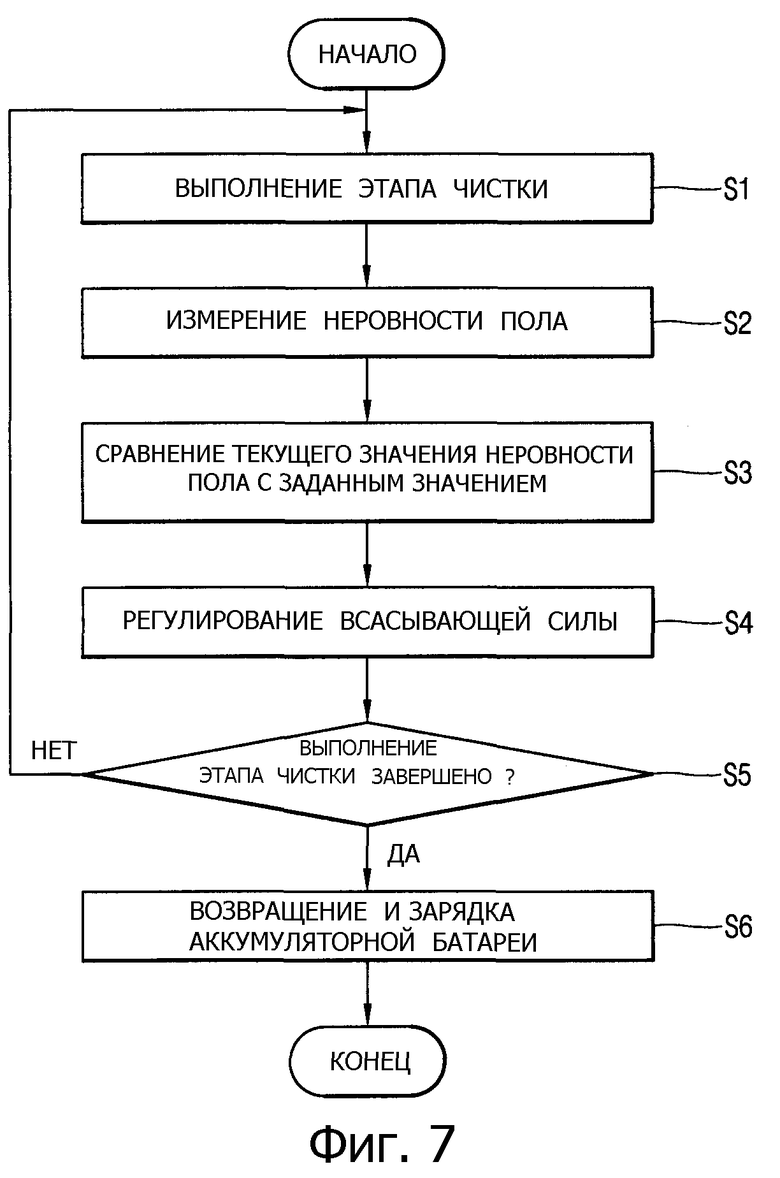
фиг.7 - блок-схема, иллюстрирующая последовательность работы робототехнического чистящего устройства в соответствии с настоящим изобретением.
Далее приведено подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах.
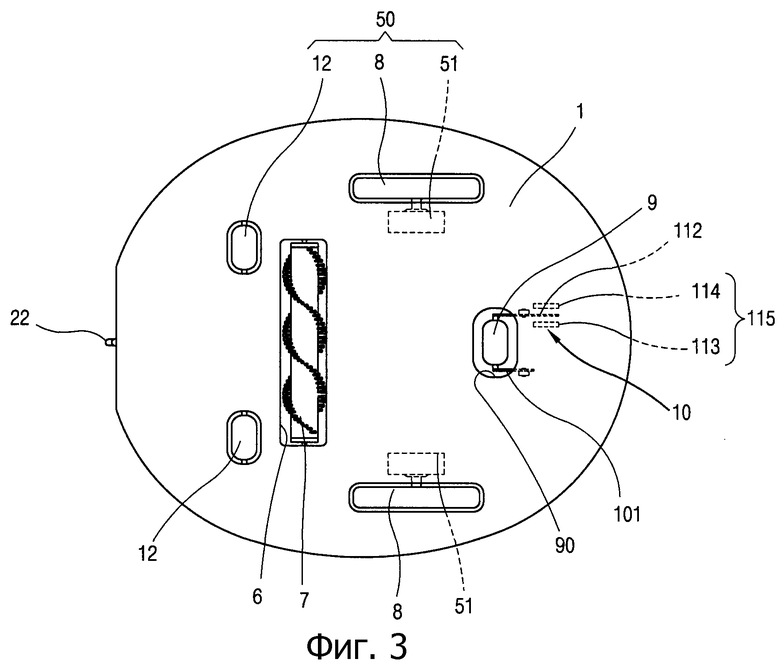
Как показано на фиг.1-3, робототехническое чистящее устройство в соответствии с настоящим изобретением включает в себя всасывающее устройство 60, смонтированное внутри корпуса 1 чистящего устройства и предназначенное для всасывания грязи, находящейся на полу; приводное устройство 50, предназначенное для обеспечения перемещения корпуса 1 чистящего устройства; по меньшей мере, один навигационный датчик 30, установленный на одной стороне корпуса 1 чистящего устройства и предназначенный для определения положения препятствия; детекторное устройство 10, установленное в корпусе 1 чистящего устройства и предназначенное для определения расстояния между днищем корпуса 1 чистящего устройства и полом; и управляющее устройство 11, предназначенное для управления каждым из указанных элементов и управления всасывающим устройством 60 по сигналу от детекторного устройства 10, в результате чего обеспечивается регулирование всасывающей силы всасывающего устройства 60.
Всасывающее устройство 60 содержит вентиляторный электродвигатель 2, смонтированный внутри корпуса 1 чистящего устройства и создающий всасывающее усилие для всасывания грязи, находящейся на полу; контейнер 4 с фильтром, установленный вблизи от вентиляторного электродвигателя 2 и имеющий фильтр 3 для отфильтровывания грязи, всосанной посредством вентиляторного электродвигателя 2; всасывающую головку 6, через которую всасывается грязь, находящаяся на полу, при этом всасывающая головка 6 выполнена на днище корпуса 1 чистящего устройства и соединена с контейнером 4 с фильтром посредством соединительной трубы 5; и щетку 7, установленную с возможностью вращения во всасывающей головке и предназначенную для удаления грязи, прилипшей к полу.
Приводное устройство 50 включает в себя ведущее колесо 8, смонтированное с возможностью вращения в корпусе 1 чистящего устройства; приводной двигатель 51, соединенный с ведущим колесом 8 и предназначенный для приведения ведущего колеса 8 во вращение; по меньшей мере, одно опорное колесо 12, смонтированное на днище корпуса 1 чистящего устройства с возможностью приведения данного колеса во вращение за счет перемещения корпуса 1 чистящего устройства и предназначенное для обеспечения опоры для корпуса 1 чистящего устройства на полу.
Навигационный датчик 30 включает в себя излучатель 31 ультразвуковых волн, смонтированный в передней центральной части корпуса 1 чистящего устройства и предназначенный для излучения ультразвуковых волн; и устройства 32 для приема ультразвуковых волн, соответственно установленные сверху и снизу относительно излучателя 31 ультразвуковых волн и предназначенные для восприятия ультразвуковых волн, отраженных препятствиями, и для выдачи сигналов для управляющего устройства 11.
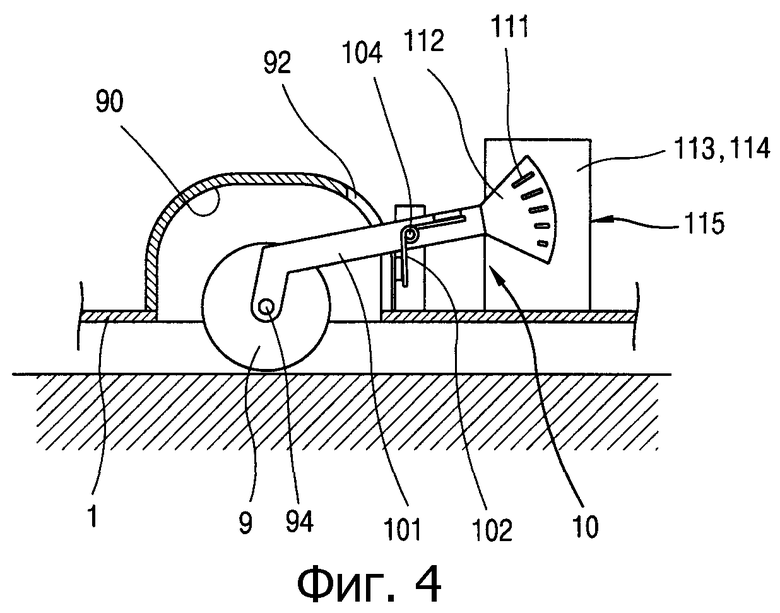
Как показано на фиг.4, детекторное устройство 10 включает в себя вспомогательное колесо 9, имеющее цилиндрическую форму, вставленное в выемку 90 в днище корпуса устройства с возможностью ввода данного колеса 9 в контакт с полом и приводимое во вращение за счет перемещения корпуса 1 чистящего устройства; соединительное звено 101, которое шарнирно соединено с осью 94 шарнира, выступающей из обоих концов вспомогательного колеса 9, проходит через сквозное отверстие 92 в выемке и соединено с возможностью поворота с осью 104 поворота, зафиксированной в корпусе 1 чистящего устройства; и измерительное устройство 15, расположенное вблизи от одного конца соединительного звена 101 и предназначенное для определения величины поворота соединительного звена 101 и измерения величины смещения колеса в вертикальном направлении.
Вспомогательное колесо 9 и соединительное звено 101 смещаются в вертикальном направлении в зависимости от неровности пола под действием их собственного веса. В данном случае для обеспечения плавного перемещения и смещения вспомогательного колеса 9 и соединительного звена 101 предпочтительно имеется упругий элемент 102, один конец которого прикреплен к корпусу 1, а другой конец прикреплен к соединительному звену 101, так что к соединительному звену 101 и к вспомогательному колесу 9 будет приложена заданная упругая сила.
Упругий элемент 102 может представлять собой цилиндрическую винтовую пружину, но может быть выполнен не только в виде цилиндрической винтовой пружины. В качестве упругого элемента 102 могут быть использованы различные элементы, такие как торсионный валик или т.п. За счет наличия такого упругого элемента 102 вспомогательное колесо 9 всегда будет находиться в контакте с полом, и корпус 1 чистящего устройства будет сохранять горизонтальное положение.
Измерительное устройство 15 включает поворачивающуюся пластину 112, выполненную на конце соединительного звена 101 и имеющую прорези 111, формы которых отличаются друг от друга; и оптический датчик 115, включающий в себя излучатель 113 света, предназначенный для излучения света в направлении поворачивающейся пластины 112, и приемник 144 световых лучей, предназначенный для приема световых лучей, проходящих через прорези 111 поворачивающейся пластины 112. Предпочтительно детекторное устройство 10 установлено перед всасывающей головкой 6 по направлению перемещения корпуса 1 чистящего устройства с тем, чтобы обеспечить определение расстояния между днищем корпуса 1 чистящего устройства и полом путем измерения этого расстояния.
Кроме того, в корпусе 1 чистящего устройства установлена аккумуляторная батарея 21. Устройство 23 с выводом для зарядки предусмотрено на задней поверхности корпуса 1 и включает в себя вывод 22 для зарядки, соединяемый с зажимом 26 терминального блока 25 питания, смонтированного на поверхности 24 стены помещения и предназначенного для зарядки аккумуляторной батареи 21. Дополнительно светоизлучающее устройство 41 установлено на нижней части терминального блока 25 питания и выдает оптический сигнал для направления корпуса 1 чистящего устройства к терминальному блоку 25 питания, и светопринимающее устройство 42 установлено на нижней части устройства 23 с выводом для зарядки и принимает оптический сигнал, излучаемый светоизлучающим устройством 41.
Когда пользователь приводит в действие робототехническое чистящее устройство в соответствии с настоящим изобретением, имеющее описанную выше конструкцию, управляющее устройство 11 и навигационный датчик 30 приводятся в действие, и ведущее колесо 8, соединенное с приводным двигателем 51, приводится во вращение. Таким образом, робототехническое чистящее устройство перемещается по зоне чистки по заданной траектории, и одновременно приводится в действие вентиляторный электродвигатель 2. Соответственно, операция чистки выполняется путем всасывания грязи, находящейся на полу, в фильтр 3 через всасывающую головку 6 и по соединительной трубе 5 и путем отфильтровывания всосанной грязи.
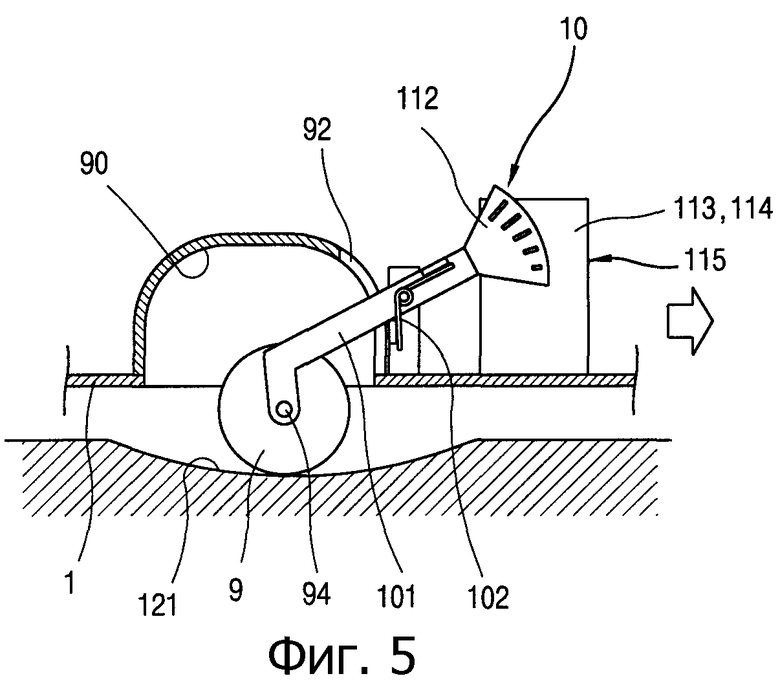
Как показано на фиг.5 и 6, когда корпус 1 чистящего устройства выполняет операцию чистки и перемещается по вогнутому участку 121 или выпуклому участку, корпус 1 чистящего устройства, в особенности всасывающая головка 6, не перемещается по криволинейной поверхности вогнутого участка 121 или выпуклого участка 122, а всегда перемещается при сохранении его горизонтального положения. Соответственно, расстояние между днищем корпуса 1 чистящего устройства и полом изменяется. Следовательно, детекторное устройство 10 обеспечивает измерение расстояния между днищем корпуса 1 чистящего устройства и полом, и в зависимости от соответствующего участка будет прикладываться разная всасывающая сила.
То есть, как показано на фиг.5, когда чистящее устройство перемещается по вогнутому участку 121 в зоне ниже ровного основания, вспомогательное колесо 9 поджимается в направлении вниз под действием упругой силы упругого элемента 102 или собственного веса вспомогательного колеса 9. Соответственно, соединительное звено 101 и поворачивающаяся пластина 112 поворачиваются относительно оси 104 поворота (против часовой стрелки на фиг.5), при этом оптический датчик 115 определяет величину смещения поворачивающейся пластины 112. Кроме того, величина смещения поворачивающейся пластины 112, определенная оптическим датчиком 115, вводится в управляющее устройство 11, и управляющее устройство 11 обеспечивает увеличение вращающей силы вентиляторного электродвигателя 2 в соответствии с введенной величиной, чтобы тем самым увеличить всасывающую силу для обеспечения мощности всасывания грязи, находящейся на вогнутом участке 121.
Кроме того, как показано на фиг.6, когда чистящее устройство перемещается по выпуклому участку 122, выпуклый участок 122 вызывает поджим вспомогательного колеса 9 в направлении вверх. Соответственно, соединительное звено 101 и поворачивающаяся пластина 112 поворачиваются относительно оси 104 поворота (по часовой стрелке на фиг.6), и при этом оптический датчик 115 определяет величину смещения поворачивающейся пластины 112. Кроме того, величина смещения поворачивающейся пластины 112, определенная оптическим датчиком 115, вводится в управляющее устройство 11, и управляющее устройство 11 обеспечивает уменьшение вращающей силы вентиляторного электродвигателя 2 в соответствии с введенной величиной, так что грязь будет всасываться с относительно небольшой всасывающей силой.
Далее операции чистки с помощью робототехнического чистящего устройства в соответствии с настоящим изобретением будут описаны со ссылкой на фиг.7. Буква 'S' на чертеже обозначает каждый этап чистки.
Сначала, когда пользователь приводит в действие выключатель чистящего устройства, чистящее устройство перемещается в зоне чистки в соответствии с заранее заданной траекторией и выполняет этап чистки (S1).
Когда чистящее устройство перемещается по неровному участку пола при одновременном выполнении этапа чистки в зоне чистки, детекторное устройство 10 определяет величину смещения вспомогательного колеса 9 в вертикальном направлении (этап S2). То есть, приемник 114 световых лучей обеспечивает измерение того, сколько света, излученного светоизлучающим устройством 113 оптического датчика 115, проходит через прорези, образованные в поворачивающейся пластине, и величина, представляющая собой результат данного измерения, передается на управляющее устройство 11.
Управляющее устройство 11 выполняет операцию сравнения измеренного значения смещения вспомогательного колеса 9 в вертикальном направлении и заданного опорного значения (этап S3).
Если после сравнения значения смещения вспомогательного колеса 9 в вертикальном направлении и заданного опорного значения будет установлено, что чистящее устройство перемещается по вогнутому участку 121 ниже ровного основания, обеспечивается увеличение вращающей силы вентиляторного электродвигателя 2, в результате чего увеличивается всасывающая сила для всасывания грязи. Если будет установлено, что чистящее устройство перемещается по выпуклому участку 122 выше ровного основания, то обеспечивается уменьшение вращающей силы вентиляторного электродвигателя 2, в результате чего уменьшается всасывающая сила для всасывания грязи. Кроме того, если пол ровный или неровность пола очень незначительная, обеспечивается регулировка всасывающей силы таким образом, чтобы она была равна всасывающей силе, заданной на ранней стадии (этап S4).
После этого управляющее устройство 11 определяет, завершено ли выполнение операции чистки чистящим устройством (этап S5). Если выполнение операции чистки не завершено, чистка выполняется снова. Если выполнение операции чистки завершено, чистящее устройство возвращается к терминальному блоку 25 питания, и осуществляется зарядка аккумуляторной батареи 21 (этап S6).
Как было описано выше, робототехническое чистящее устройство в соответствии с настоящим изобретением распознает неровность пола и обеспечивает регулирование всасывающей силы в зависимости от неровности пола, в результате чего эффективность чистки может быть повышена.
Поскольку настоящее изобретение может быть реализовано в нескольких вариантах, не отходя от его существа или существенных отличительных признаков, также следует понимать, что описанные выше варианты осуществления не ограничены какими-либо из деталей вышеприведенного описания, если не указано иное, но изобретение следует толковать широко в пределах его существа и объема, определяемых приложенной формулой изобретения, и поэтому все изменения и модификации, которые находятся в пределах [объема притязаний] формулы изобретения или эквивалентов таких пределов, должны охватываться приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКОЕ ЧИСТЯЩЕЕ УСТРОЙСТВО И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2004 |
|
RU2263461C1 |
| ЧИСТЯЩИЙ АВТОМАТ, РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЧИСТЯЩЕГО АВТОМАТА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2002 |
|
RU2236814C2 |
| ВЕНТИЛЯТОР ДВИГАТЕЛЯ ДЛЯ ЧИСТЯЩЕГО УСТРОЙСТВА (ВАРИАНТЫ) | 1997 |
|
RU2145182C1 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2534916C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2531263C2 |
| ЧИСТЯЩАЯ НАСАДКА ДЛЯ ПЫЛЕСОСА | 2002 |
|
RU2281682C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2530795C2 |
| УСТРОЙСТВО ДЛЯ ГЛУБОКОЙ ЧИСТКИ СО СЪЕМНЫМ МОДУЛЕМ | 2012 |
|
RU2583899C2 |
| НАСАДОЧНОЕ ВСАСЫВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЧИСТЯЩЕГО АППАРАТА И ЧИСТЯЩИЙ АППАРАТ | 2013 |
|
RU2647234C2 |
| АВТОНОМНОЕ МОБИЛЬНОЕ ЧИСТЯЩЕЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ ТАКОВОГО | 2013 |
|
RU2533676C2 |
Робототехническое чистящее устройство содержит всасывающее устройство, установленное в корпусе чистящего устройства и предназначенное для всасывания грязи, находящейся на полу; приводное устройство, предназначенное для обеспечения перемещения корпуса чистящего устройства; детекторное устройство, закрепленное в корпусе чистящего устройства и предназначенное для определения расстояния между днищем корпуса чистящего устройства и полом; и управляющее устройство, управляющее всасывающим устройством по сигналу от детекторного устройства для регулирования всасывающей силы всасывающего устройства. Эффективность чистки, обеспечиваемая данным робототехническим чистящим устройством, повышена за счет регулирования всасывающей силы, необходимой для всасывания грязи, в соответствии с неровностью пола. 3 н. и 10 з.п. ф-лы, 7 ил.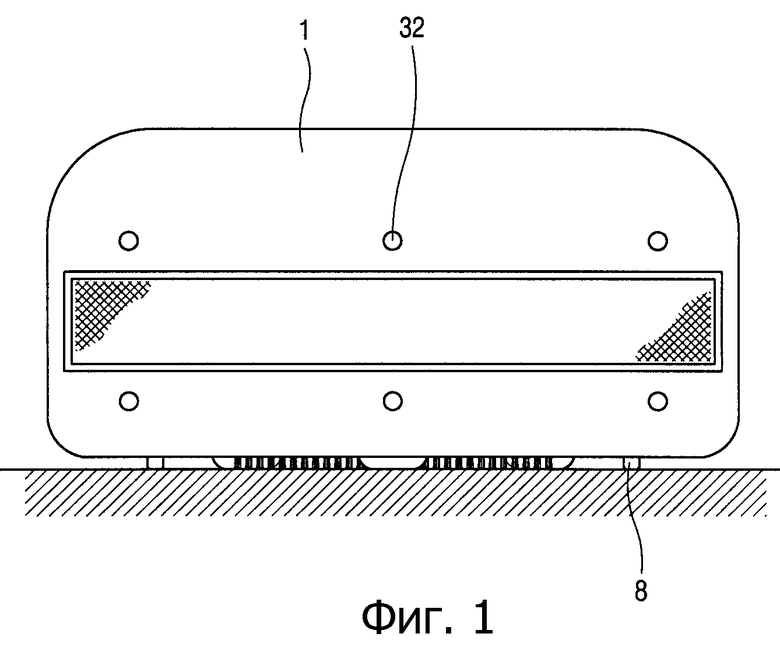
| US 5109566 А, 05.05.1992 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ЧИСТЯЩИЙ РОБОТ, СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО И СПОСОБ ВОЗВРАЩЕНИЯ ЧИСТЯЩЕГО РОБОТА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2001 |
|
RU2218859C2 |
| US 4977639 А, 18.12.1990. | |||

