ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к робототехническому чистящему устройству и способу его функционирования, а более точно к робототехническому чистящему устройству и способу его функционирования, обеспечивающим возможность плавного осуществления операции чистки путем выполнения соответствующего действия, когда чистящее устройство перемещается с отклонением от нормального режима из-за наличия препятствия или т.п. при выполнении чистки в процессе автоматического перемещения.
Описание известного уровня техники
В широком смысле робототехническое чистящее устройство представляет собой машину, которая автоматически обнаруживает зону чистки, препятствие или т.п. без управления, осуществляемого пользователем, осуществляет чистку в процессе автоматического перемещения, автоматически перемещается к зарядной станции для зарядки, когда аккумуляторная батарея разряжается, и возвращается в зону чистки, когда зарядка будет завершена, для осуществления операции чистки.
Традиционное робототехническое чистящее устройство содержит всасывающее устройство, предназначенное для всасывания грязи, находящейся на полу, ведущее колесо, соединенное с приводным электродвигателем и предназначенное для обеспечения перемещения робототехнического чистящего устройства в направлении движения, множество вспомогательных колес, предназначенных для обеспечения опоры для чистящего устройства на полу, навигационный датчик, предназначенный для определения положений чистящего устройства, препятствий и т.п., и блок управления, предназначенный для автоматического управления чистящим устройством. Такое чистящее устройство осуществляет операцию чистки путем перемещения в соответствии с предварительно заданной траекторией, а кодовый датчик, соединенный с ведущим колесом, определяет положение ведущего колеса при вращении, чтобы тем самым определить состояние положения чистящего устройства при перемещении.
Тем не менее, традиционное робототехническое чистящее устройство имеет следующий недостаток.
Даже в том случае, когда обычное робототехническое чистящее устройство не перемещается заданным образом при встрече с препятствием или т.п. в процессе чистки или перемещения, поскольку ведущее колесо вращается на полу с проскальзыванием, кодовый датчик идентифицирует вращение ведущего колеса как нормальное, и управляющее устройство также определяет, что чистящее устройство работает нормально. Соответственно, невозможно осуществить действие, необходимое при аномальном перемещении чистящего устройства, в результате чего операция чистки не будет выполняться заданным образом.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Следовательно, цель настоящего изобретения заключается в обеспечении робототехнического чистящего устройства и способа его функционирования, обеспечивающих возможность плавного осуществления операции чистки путем точного определения состояния (положения) чистящего устройства при его перемещении и выполнения надлежащего действия, когда чистящее устройство не может перемещаться нормальным образом.
Для достижения этих и других преимуществ и в соответствии с целью настоящего изобретения в том виде, как оно реализовано и широко описано здесь, разработано робототехническое чистящее устройство, содержащее всасывающее устройство, смонтированное в корпусе чистящего устройства и предназначенное для всасывания грязи, находящейся на полу, приводное устройство, предназначенное для обеспечения перемещения корпуса чистящего устройства; колесо, смонтированное у нижней части корпуса чистящего устройства с возможностью приведения данного колеса в контакт с полом и приводимое во вращение за счет перемещения корпуса чистящего устройства, детекторное устройство, предназначенное для распознавания того, вращается ли колесо, и блок управления, предназначенное для управления приводным устройством в ответ на сигнал от детекторного устройства.
При этом детекторное устройство содержит:
средство индикации, обеспеченное на колесе, при этом его состояние изменяется, пока колесо вращается; и
средство обнаружения, установленное рядом с колесом и предназначенное для распознавания состояния средства индикации.
Кроме того, средство индикации включает в себя множество покрывающих слоев, выполненных из материалов, которые имеют разный коэффициент поглощения света и которые попеременно нанесены на наружную окружную периферийную поверхность колеса в окружном направлении; и
средство обнаружения включает в себя оптический датчик, предназначенный для излучения света на покрывающий слой и для распознавания изменения отражающей способности света, отражаемого от покрывающего слоя.
Для достижения этих и других преимуществ и в соответствии с целью настоящего изобретения в том виде, как оно реализовано и широко описано здесь, разработан способ работы робототехнического чистящего устройства, включающий в себя первый этап, на котором осуществляется чистка за счет автоматического перемещения и всасывания грязи, находящейся на полу, второй этап, на котором определяется, перемещается ли чистящее устройство нормальным образом, путем определения того, вращается ли колесо, обеспечивающее опору для чистящего устройства на полу и приводимое во вращение за счет перемещения чистящего устройства, и третий этап, на котором осуществляется отвод чистящего устройства из места, где на втором этапе была выявлена остановка вращения колеса.
Вышеуказанные и другие цели, признаки, особенности и преимущества настоящего изобретения станут более очевидными из нижеприведенного подробного описания настоящего изобретения при рассмотрении его совместно с сопровождающими чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи, которые включены для обеспечения лучшего понимания изобретения, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для разъяснения принципов изобретения.
Фиг.1 представлен вид, показывающий переднюю сторону робототехнического чистящего устройства в соответствии с настоящим изобретением;
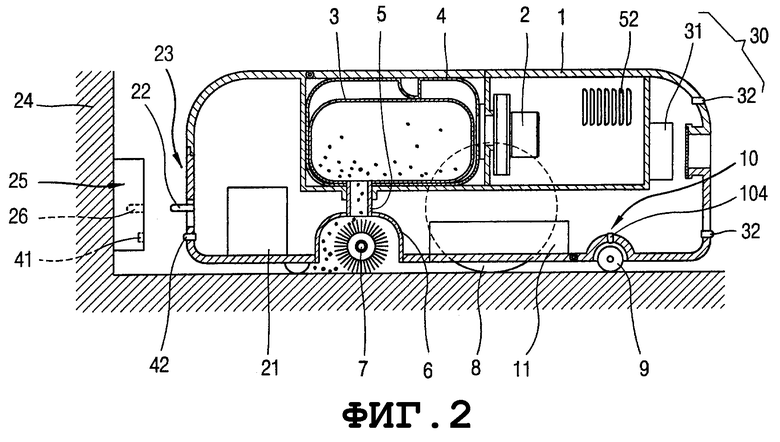
На фиг.2 - сечение, показывающее робототехническое чистящее устройство в соответствии с настоящим изобретением;
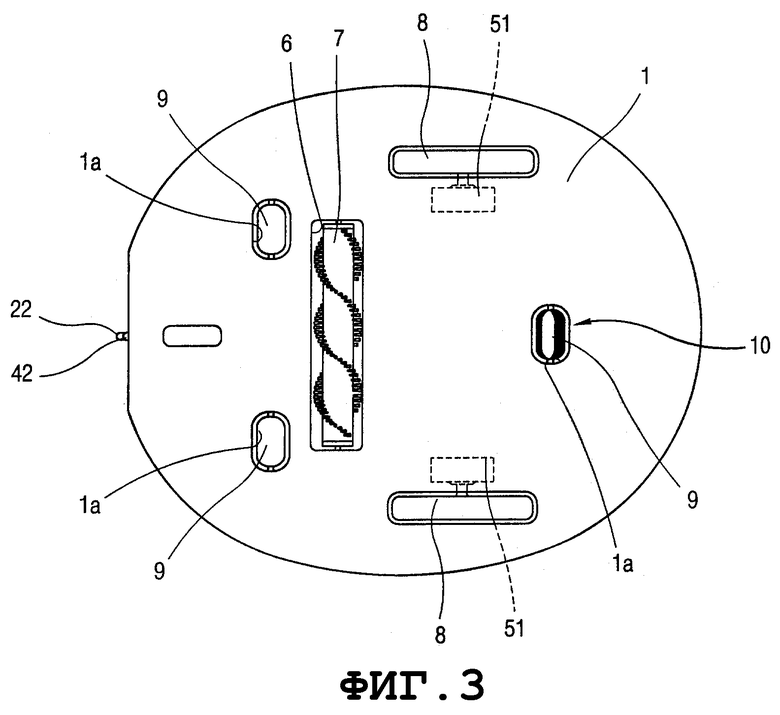
На фиг.3 - вид, показывающий нижнюю часть робототехнического чистящего устройства в соответствии с настоящим изобретением;
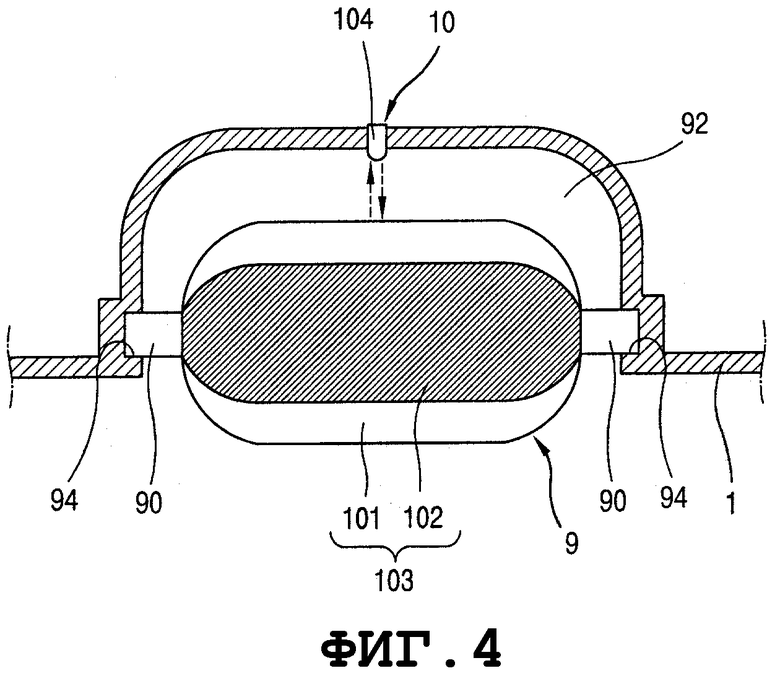
На фиг.4 - частичный разрез, показывающий детекторное устройство, предусмотренное в робототехническом чистящем устройстве в соответствии с настоящим изобретением; и
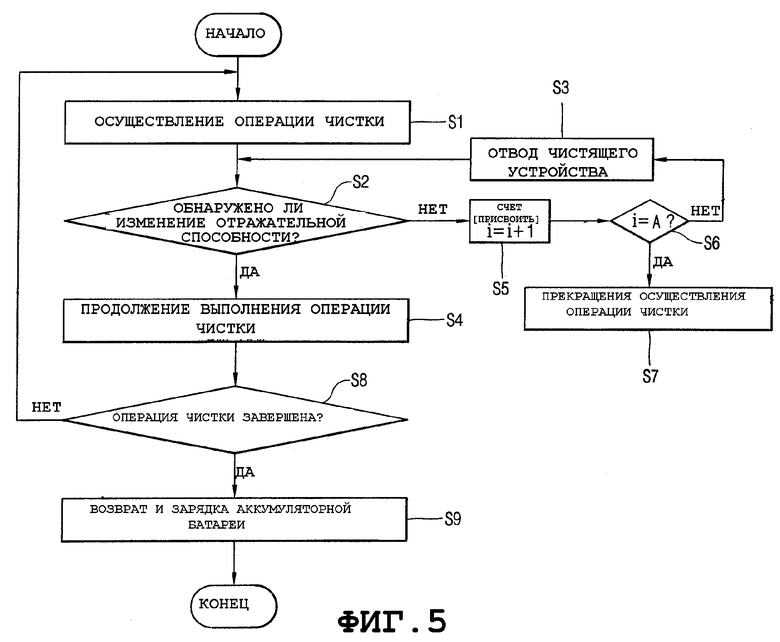
На фиг.5 - блок-схема, иллюстрирующая последовательность работы робототехнического чистящего устройства в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее приведено подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы на сопровождающих чертежах.
Как показано на фиг.1-3, робототехническое чистящее устройство в соответствии с настоящим изобретением включает в себя: вентиляторный электродвигатель 2, смонтированный внутри корпуса 1 чистящего устройства и предназначенный для создания всасывающей силы; контейнер 4 с фильтром, имеющий фильтр 3, установленный вблизи вентиляторного электродвигателя 2 и обеспечивающий отфильтровывание грязи, всосанной посредством вентиляторного электродвигателя 2; всасывающую головку 6, которая предусмотрена у нижней части корпуса, соединенную с контейнером 4 с фильтром посредством соединительной трубы 5 и через которую всасывается грязь, находящаяся на полу; щетку 7, установленную с возможностью вращения во всасывающей головке 6 и предназначенную для удаления грязи, прилипшей к полу; выпускное отверстие 52, которое образовано на одной боковой стороне корпуса 1 и через которое выпускается воздух, подвергшийся фильтрации; по меньшей мере, один навигационный датчик 30, установленный на одной стороне корпуса чистящего устройства и предназначенный для определения положения чистящего устройства и положения препятствия или т.п.; ведущее колесо 8, смонтированное с возможностью вращения в корпусе 1; приводной двигатель 51, предназначенный для приведения ведущего колеса 8 во вращение; по меньшей мере, одно вспомогательное колесо 9, смонтированное у нижней части корпуса 1 чистящего устройства для обеспечения опоры для корпуса чистящего устройства на полу и вращающееся вхолостую за счет перемещения корпуса 1 чистящего устройства; детекторное устройство 10, предназначенное для распознавания того, вращается ли вспомогательное колесо 9, чтобы тем самым определить состояние чистящего устройства при перемещении, и блок 11 управления, предназначенный для управления работой каждого элемента, а также для управления приводным двигателем при получении сигнала от детекторного устройства 10.
Кроме того, перезаряжаемая аккумуляторная батарея 21 установлена внутри корпуса 1 чистящего устройства. Устройство 23 с выводом для зарядки предусмотрено на задней поверхности корпуса 1 и включает в себя вывод 22 для зарядки, соединяемый с зажимом 26 терминального блока 25 питания, смонтированного на стене 24 помещения и предназначенного для зарядки аккумуляторной батареи 21. Кроме того, светоизлучающее устройство 41 смонтировано в нижней части терминального блока 25 питания и выдает оптический сигнал для обеспечения направления корпуса 1 чистящего устройства к терминальному блоку 25 питания. Светопринимающее устройство 42 смонтировано в нижней части устройства 23 с выводом для зарядки и принимает оптический сигнал, выданный светоизлучающим устройством 41.
Навигационный датчик 30 включает в себя устройство 31 для распространения ультразвуковых волн, смонтированное в передней центральной части корпуса 1 чистящего устройства и предназначенное для распространения ультразвуковых волн; и устройства 32 для приема ультразвуковых волн, соответственно установленные сверху и снизу по отношению к устройству 31 для распространения ультразвуковых волн и предназначенные для восприятия ультразвуковых волн, отраженных препятствием или т.п.
Как показано на фиг.4, вспомогательное колесо 9 выполнено в виде стержня с круглым сечением и установлено с возможностью вращения у корпуса 1 чистящего устройства таким образом, что его заданная часть будет вставлена в выемку 92, созданную путем образования углубления в нижней стороне корпуса 1, выступающие части 90, выступающие от обоих концов вспомогательного колеса 9, будут вставлены в принимающие канавки 94, образованные соответственно на обеих сторонах внутренней периферийной поверхности выемки 92. Соответственно, вспомогательное колесо 9 вращается в состоянии, когда оно находится в контакте с полом, всегда при перемещении чистящего устройства. При этом форма или способ установки вспомогательного колеса 9 не ограничены указанной формой или способом, но вспомогательное колесо может быть выполнено и установлено различными способами.
Детекторное устройство 10 включает в себя средство 103 индикации, образованное из материалов, имеющих разную оптическую отражательную способность (коэффициент отражения света) или разный коэффициент поглощения света, которые последовательно нанесены на наружную окружную периферийную поверхность вспомогательного колеса 9 в окружном направлении, и оптический датчик 104, установленный с одной стороны от вспомогательного колеса 9, излучающий свет в направлении средства 103 индикации, затем воспринимающий отраженный свет и выдающий сигнал считывания управляющему устройству 11. Средство 103 индикации состоит из белого покрывающего слоя 101 и черного покрывающего слоя 102, попеременно нанесенных на наружную окружную периферийную поверхность вспомогательного колеса 9.
Детекторное устройство 10 может быть установлено не только у вспомогательного колеса 9, предназначенного для обеспечения опоры для корпуса чистящего устройства, как в вышеописанном случае, но и у средства качения, которое выполнено отдельно и приводится во вращение с проскальзыванием на полу за счет перемещения корпуса 1 чистящего устройства.
Поскольку вспомогательное колесо 9 приводится во вращение, когда чистящее устройство перемещается заданным образом, оптический датчик 104 детекторного устройства 10 распознает изменение отраженного света, попеременно отражаемого от белого покрывающего слоя 101 и черного покрывающего слоя 102, и в этом случае блок 11 управления определяет, что чистящее устройство перемещается заданным образом. Кроме того, поскольку ведущее колесо 8 вращается с проскальзыванием на полу или вспомогательное колесо 9 не вращается в том случае, когда чистящее устройство перемещается аномальным образом, оптический датчик распознает, что отраженный свет, отраженный от белого покрывающего слоя 101 и черного покрывающего слоя 102, не изменился. В этом случае блок 11 управления сравнивает сигнал считывания (измерительный сигнал) с предварительно заданной величиной, определяет, что чистящее устройство перемещается аномальным образом, и выдает сигнал для выполнения соответствующего действия.
Когда робототехническое чистящее устройство в соответствии с настоящим изобретением, имеющее описанную выше конструкцию, приводится в действие пользователем, управляющее устройство 11 и навигационный датчик 30 приводятся в действие, и ведущее колесо 8, соединенное с приводным двигателем 51, приводится во вращение. После этого чистящее устройство перемещается по зоне чистки вдоль заданной траектории, и одновременно приводится в действие вентиляторный электродвигатель 2. Соответственно, операция чистки осуществляется путем всасывания грязи, находящейся на полу, в фильтр 3 через всасывающую головку 6 и по соединительной трубе 5 и последующего отфильтровывания введенной грязи.
Однако в том случае, если чистящее устройство не может нормально перемещаться из-за "удерживания" его препятствием, которое не было распознано ранее при перемещении, детекторное устройство 10 определяет, вращается ли вспомогательное колесо 9, и, следовательно, определяет состояние чистящего устройства, остановленного препятствием. При этом блок 11 управления получает сигнал от детекторного устройства 10 и осуществляет соответствующее управление приводным двигателем 51 для обеспечения автоматического отвода чистящего устройства из зоны с препятствием.
Далее последовательная работа робототехнического чистящего устройства, подобного описанному выше, будет описана по этапам со ссылкой на фиг.5. На чертеже буква 'S' обозначает каждый этап (шаг).
Сначала, когда пользователь приводит в действие выключатель чистящего устройства, чистящее устройство перемещается по зоне чистки вдоль заданной траектории, осуществляя операцию чистки (S1).
Когда чистящее устройство осуществляет операцию чистки в зоне чистки, детекторное устройство 10 определяет, вращается ли вспомогательное колесо 9. То есть оптический датчик 104 детекторного устройства 10 распознает изменение количества света, отраженного от средства 103 индикации (S2).
Если в этот момент будет иметь место изменение оптической отражательной способности, воспринимаемое оптическим датчиком 104, это означает, что корпус 1 чистящего устройства перемещается. Следовательно, обеспечивается продолжение осуществления этапа чистки (S4).
С другой стороны, если не будет зарегистрировано изменение оптической отражательной способности оптическим датчиком 104, то это означает, что препятствие вызвало останов чистящего устройства. Следовательно, выполняется операция отвода чистящего устройства из текущего положения. То есть предпринимается попытка вывести чистящее устройство от места, где чистящее устройство не может перемещаться из-за препятствия, путем приведения ведущего колеса 8, соединенного с приводным двигателем 51, во вращение в обратном направлении в течение заданного времени (S3).
После осуществления операции отвода чистящего устройства детекторное устройство 10 определяет, вращается ли вспомогательное колесо 9. Если в этот момент оптический датчик распознает изменение оптической отражательной способности, операция чистки будет выполняться снова. Но если оптический датчик не распознает никакого изменения оптической отражательной способности, операция отвода чистящего устройства выполняется снова. В данном случае всякий раз, когда выполняется операция отвода чистящего устройства, число случаев выполнения операции подсчитывается (S5). Подсчитанная величина сравнивается с предварительно заданной величиной (А) (S6). Если в данном случае число случаев выполнения операции отвода чистящего устройства не будет равно заданной величине (А), этап отвода чистящего устройства осуществляется, а если данное число будет равно заданной величине (А), функционирование чистящего устройства прекращается (S7). То есть в том случае, если чистящее устройство не выведено из зоны, где чистящее устройство не может продолжать перемещаться из-за препятствия, даже несмотря на то, что операция отвода чистящего устройства из этой зоны выполнялась несколько раз, работа чистящего устройства прекращается, в результате чего предотвращается ненужное потребление энергии и "излишнее" функционирование элементов.
С другой стороны, после выполнения операции чистки без прекращения перемещения чистящего устройства блок 11 управления определяет, завершена ли операция чистки, выполняемая чистящим устройством (S8). Если операция чистки не завершена, операция чистки выполняется снова. Если операция чистки завершена, чистящее устройство возвращается к терминальному блоку 25 питания, и аккумуляторная батарея 21 заряжается (S9).
Как описано выше, робототехническое устройство в соответствии с настоящим изобретением может плавно и непрерывно осуществлять операцию чистки даже в том случае, если робототехническое чистящее устройство будет остановлено при отклонении от нормального режима работы из-за препятствия, которое ранее не было распознано при перемещении.
Поскольку настоящее изобретение может быть реализовано в нескольких вариантах, не отходя от его существа или существенных отличительных признаков, также следует понимать, что описанные выше варианты осуществления не ограничены какими-либо из деталей вышеприведенного описания, если не указано иное, но изобретение следует толковать широко в пределах его существа и объема, определяемых приложенной формулой изобретения, и поэтому все изменения и модификации, которые находятся в пределах формулы изобретения или эквивалентов, должны охватываться приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКОЕ ЧИСТЯЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ ЧИСТКИ С ПОМОЩЬЮ ТАКОГО ЧИСТЯЩЕГО УСТРОЙСТВА | 2004 |
|
RU2262881C1 |
| ЧИСТЯЩИЙ АВТОМАТ, РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЧИСТЯЩЕГО АВТОМАТА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2002 |
|
RU2236814C2 |
| РОБОТ-ЧИСТИТЕЛЬ, ОСНАЩЕННЫЙ ГЕНЕРАТОРОМ ОТРИЦАТЕЛЬНЫХ ИОНОВ | 2004 |
|
RU2279244C2 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ РОБОТА-ПЫЛЕСОСА | 2004 |
|
RU2267977C1 |
| ОЧИСТИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2006 |
|
RU2333717C1 |
| УСТРОЙСТВО ДЛЯ ГЛУБОКОЙ ЧИСТКИ СО СЪЕМНЫМ МОДУЛЕМ | 2012 |
|
RU2583899C2 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2601931C2 |
| РОБОТ-ПЫЛЕСОС | 2013 |
|
RU2560319C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| УСТРОЙСТВО ОБРАБОТКИ ДОКУМЕНТОВ | 2007 |
|
RU2447007C2 |
Робототехническое чистящее устройство содержит всасывающее устройство, смонтированное в корпусе чистящего устройства и предназначенное для всасывания грязи, находящейся на полу; приводное устройство, предназначенное для обеспечения перемещения корпуса чистящего устройства; колесо, смонтированное у нижней части корпуса чистящего устройства с возможностью приведения данного колеса в контакт с полом и приводимое во вращение за счет перемещения корпуса чистящего устройства; детекторное устройство, предназначенное для распознавания того, вращается ли колесо; и блок управления, предназначенный для управления приводным устройством в ответ на сигнал от детекторного устройства. Робототехническое чистящее устройство может плавно и непрерывно осуществлять операцию чистки даже в том случае, если оно будет остановлено при отклонении от заданного режима работы из-за препятствия, которое ранее не было распознано при перемещении, что позволяет более эффективно производить операцию чистки в соответствии с предварительно заданной траекторией. 3 н. и 9 з.п. ф-лы, 5 ил.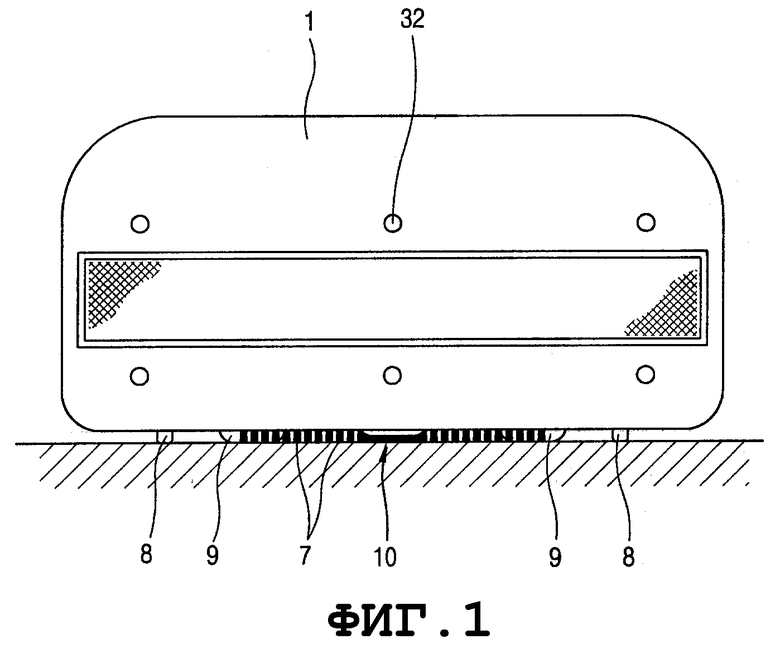
| ЧИСТЯЩИЙ РОБОТ, СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО И СПОСОБ ВОЗВРАЩЕНИЯ ЧИСТЯЩЕГО РОБОТА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2001 |
|
RU2218859C2 |
| JP 7047044 A, 21.02.1995 | |||
| DE 4218172 C1, 25.11.1993 | |||
| US 4977639 A, 18.12.1990. | |||

