Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, в частности к механизмам автомата перекоса вертолета, и может быть использовано при создании новых конструкций вертолетов и летательных аппаратов вертикального взлета и посадки.
Уровень техники
Известен несущий винт летательного аппарата, содержащий вал винта, гидравлическую втулку с лопастями для изменения шага винта и автомат перекоса, при этом он снабжен корпусом с двумя или более лопастями, закрепленными на корпусе и несущими на себе по одному или более реактивных двигателей, выполненных с возможностью мгновенного воспламенения их топлива при возникновении неисправности механизмов винта, причем корпус имеет возможность свободного вращения в направлении вращения вала несущего винта (см. пат. RU №2229423, МПК В64С 27/32, В64С 27/08, опубл. 27.05.2004 г.).
Недостатком данного летательного аппарата является сложность конструкции, невысокая надежность.
Известен вертолет с соосными несущими винтами, содержащий фюзеляж, включающий кабину экипажа с органами управления, редуктор с двумя соосными валами противоположного вращения, на каждом из которых смонтированы втулки несущих винтов, два автомата перекоса и кинематически связанные с ними рычажные качалки управления углом установки лопастей, цепи управления каждым из несущих винтов, включающие блок силовых цилиндров и суммирующий рычажный механизм, при этом суммирующий рычажный механизм оснащен двумя соосно расположенными и взаимоподвижными в осевом направлении стаканами, причем один из стаканов установлен на цилиндрической части верхнего корпуса редуктора, а второй стакан установлен концентрично первому, на поверхности второго стакана смонтирован автомат перекоса нижнего несущего винта, а кинематически связанная с ним рычажная качалка закреплена на верхней выступающей поверхности первого стакана, кроме того, каждый из стаканов шарнирно соединен посредством рычагов суммирующего механизма между собой и блоком силовых цилиндров, который жестко установлен на корпусе редуктора, при этом внутренний вал редуктора выполнен съемным в сборе с установленными на нем втулкой верхнего несущего винта, рычажной качалкой, верхним автоматом перекоса и тягами, обеспечивающими их взаимную кинематическую связь (см. пат. RU №2265554, МПК В64С 27/00, В64С 27/32, В64С 27/54, опубл. 10.12.2005 г.).
Недостатком данного вертолета является высокая трудоемкость его эксплуатационного обслуживания.
Наиболее близким по технической сущности и достигаемому положительному эффекту и принятым авторами за прототип является механизм автомата перекоса вертолета, включающий раму, вал, невращающееся и вращающееся кольца, поводок, тарель с вертикальными тягами, рычаги поперечного и продольного управления, штангу с полозом, ручку управления с рычажными качалками и рукоятку шаг-газ (см. Михеев В.Р. Развитие схем винтокрылых летательных аппаратов. М., 1993, стр.54-57).
Недостатком данного механизма автомата перекоса вертолета является сложность изготовления деталей, ограниченный ход, так как механизм автомата перекоса расположен на валу и высокие затраты на изготовление.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка механизма автомата перекоса вертолета, обладающего упрощением и удешевлением его изготовления с одновременным повышением его надежности, увеличением хода от (-21°) до (+35°) угла атаки лопастей за счет введения лифтовых направляющих.
Технический результат, который может быть получен с помощью предлагаемого изобретения, сводится к упрощению и удешевлению изготовления, повышению его надежности, увеличению хода.
Технический результат достигается с помощью механизма автомата перекоса вертолета, содержащего раму, вал, невращающееся и вращающееся кольца, поводок, тарель с вертикальными тягами, рычаги поперечного и продольного управления, штангу с полозом, ручку управления с рычажными качалками и рукоятку шаг-газ, при этом он дополнительно снабжен двумя параллельно расположенными в одной плоскости лифтовыми направляющими и эксцентриками, установленными в нижних частях последних, каждый из которых с помощью штанги соединен с полозом, при этом лифтовые направляющие жестко закреплены на раме, а на полозе установлено невращающееся кольцо, выполненное с возможностью возвратно-поступательного движения по нему, причем невращающееся кольцо соединено полуосью с полозом, который установлен внутри лифтовой направляющей, при этом внутри невращающегося кольца установлено вращающееся кольцо, которое состоит из неподвижной части и впрессованного в последнюю подшипника, а во внутреннюю обойму подшипника жестко установлена тарель с закрепленными на последней вертикальными тягами, которые соединены с лопастями, а рычаги поперечного и продольного управления закреплены к неподвижной части вращающегося кольца, причем рычаг поперечного управления жестко закреплен под 90 градусов по окружности неподвижной части, при этом оба рычага соединены тягами и рычажными качалками с ручкой управления, а рукоятка шаг-газ соединена с эксцентриком.
Краткое описание чертежей
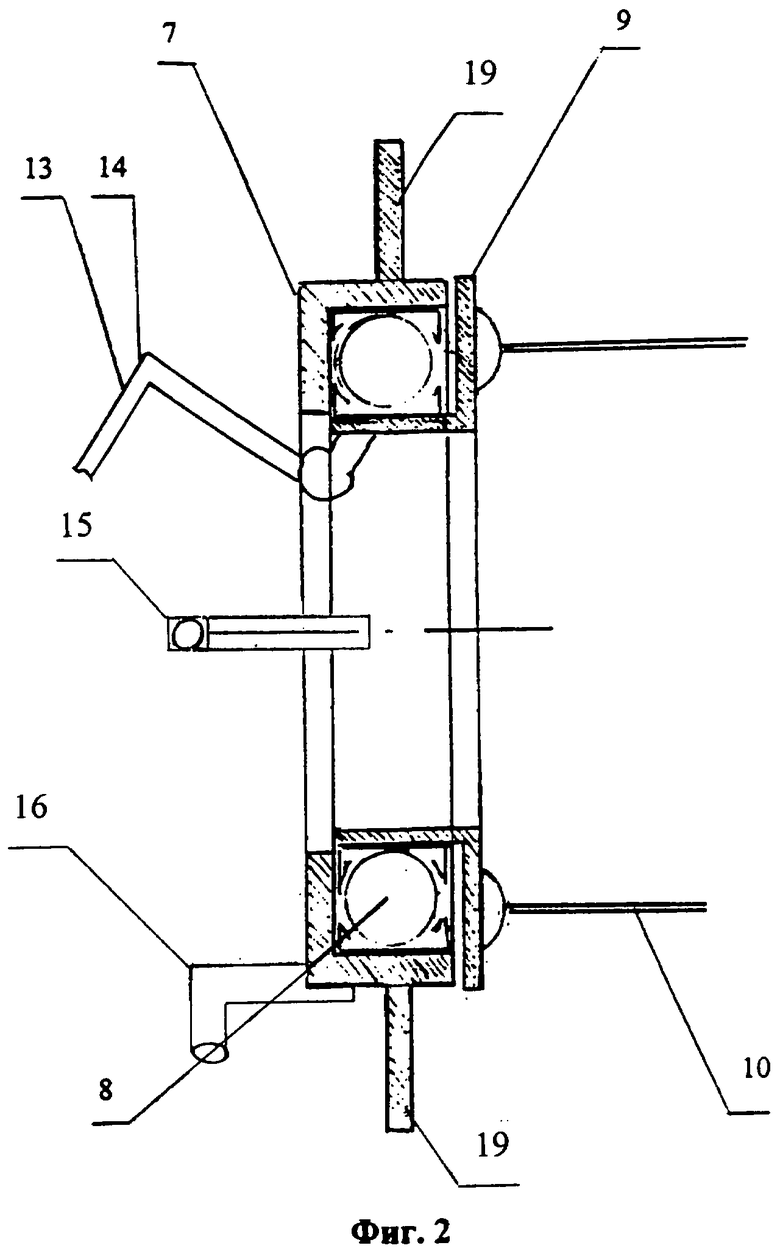
На фиг.1 дан механизм автомата перекоса вертолета, общий вид.
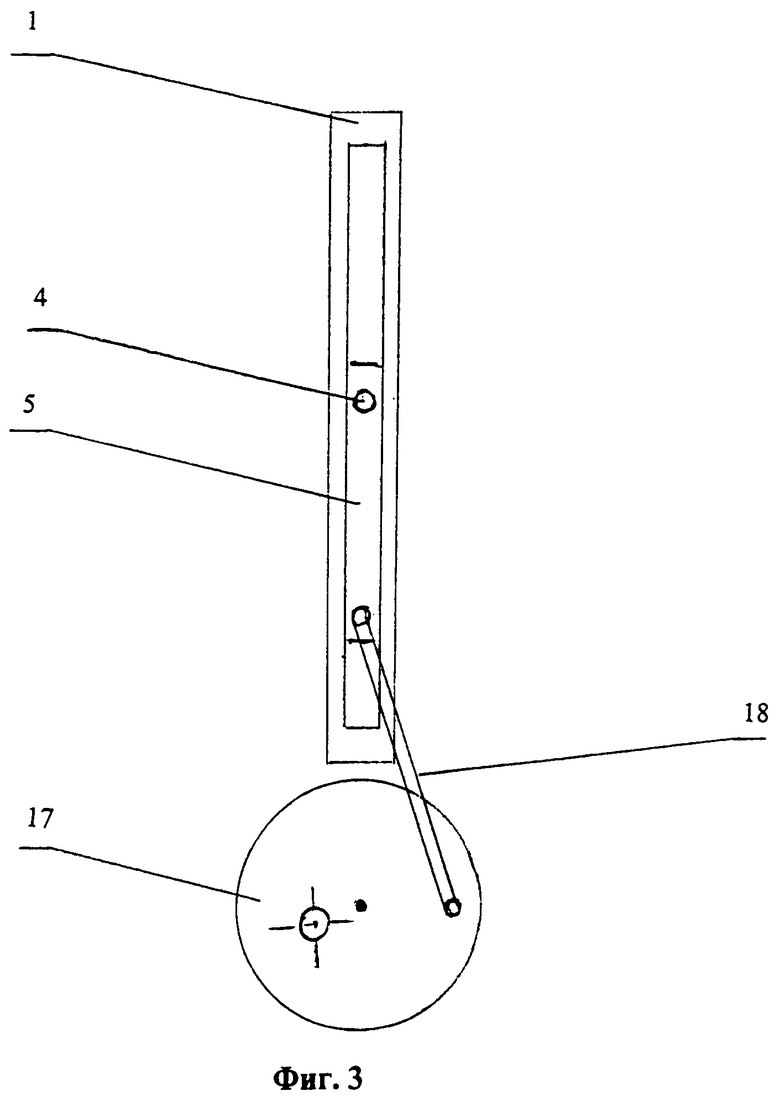
На фиг.2 - то же, тарель с вертикальными тягами.
На фиг.3 - то же, эксцентрик, соединенный с полозом.
Осуществление изобретения
Механизм автомата перекоса вертолета состоит из двух параллельно расположенных в одной плоскости лифтовых направляющих 1, выполненных с возможностью увеличения хода от (-21°) до (+35°) угла атаки лопастей (на фиг. не показаны) и жестко закрепленных на раме 2 вертолета (на фиг. не показан), также содержит невращающееся кольцо 3, выполненное с возможностью возвратно-поступательного движения, причем невращающееся кольцо 3 соединено полуосью 4 с полозом 5, который установлен внутри лифтовой направляющей 1, и на полозе 5 установлено невращающееся кольцо 3, выполненное с возможностью возвратно-поступательного движения по нему, при этом внутри невращающегося кольца 3 установлено вращающееся кольцо 6, которое состоит из неподвижной части 7 и впрессованного в последнюю подшипника 8, а во внутреннюю обойму подшипника 8 впрессована тарель 9, которая является подвижным элементом с закрепленными на последней вертикальными тягами 10, с помощью которых происходит изменение угла атаки лопастей, соединенными с валом 11 вертолета горизонтальным шарниром 12, причем с механизмом автомата перекоса кинематически связаны рычажные качалки (на фиг. не показаны), а тарель 9 соединена поводком 13 через шлиц-шарнир 14 с валом 11 вертолета, который приводит во вращение тарель 9, при этом к неподвижной части 7 закреплен рычаг 15 для поперечного управления и рычаг 16 для продольного управления, а в нижних частях лифтовых направляющих 1 установлены эксцентрики 17, каждый из которых с помощью штанги 18 соединен с полозом 5, причем к неподвижной части 7 вращающегося кольца 6 под полуосью 19 жестко закреплен рычаг 16 для продольного управления, а под 90 градусов по окружности неподвижной части 7 также жестко закреплен рычаг 15 для поперечного управления, при этом оба рычага 15 и 16 для поперечного и продольного управления, соответственно, соединены тягами и рычажными качалками с ручкой управления (на фиг. не показана) в кабине вертолета, а рукоятка шаг-газ (на фиг. не показана) соединена с эксцентриком 17.
Механизм автомата перекоса работает следующим образом.
Ручка управления циклического шага в кабине (на фиг. не показана) пилота через горизонтальные тяги (на фиг. не показаны) и рычажные качалки соединена с вращающимся кольцом 6 через рычаги 15, 16 поперечного и продольного управления, соответственно, а рукоятка шаг-газ соединена с эксцентриками 17, таким образом невращающееся кольцо 3, соединенное полуосью 4 с полозом 5 вращающегося кольца 6, при действии ручки управления вертолетом может наклоняться вперед, назад, вбок одновременно относительно любой оси, лежащей в горизонтальной плоскости, при этом так как вращающееся кольцо 6 вертикальными тягами 10 связано с лопастями, то наклон плоскости вращения этого вращающегося кольца 6 вызывает циклический поворот лопастей относительно их продольных осей, а при действии на рукоятку шаг-газ происходит поворот эксцентрика 17, и через штангу 18 движение передается на полоз 5, при этом происходит возвратно-поступательное движение полоза 5 по лифтовым направляющим 1 от (-21°) до (+35°), которые жестко закреплены на раме 2, и так как ось вала 11 вертолета совмещена с центром обоих колец невращающимся 3 и вращающимся 6, оба полоза 5, находящихся в лифтовых направляющих 1, и оба эксцентрика 17 в движении синхронны, при этом к обоим полозам 5 присоединено невращающееся кольцо 3, в результате этого воздействия происходит изменение угла атаки лопастей винта (на фиг. не показан) вертолета, причем механизм автомата перекоса дает помимо положительного угла атаки лопасти винта, также отрицательный, при этом вал 11 вертолета, соединенный с лопастями с помощью горизонтального шарнира 12, раскручивает тарель 9, которая является подвижным элементом, впрессована во внутреннюю обойму подшипника 8, причем последний, в свою очередь, впрессован в неподвижную часть 7, при этом тарель 9 соединена поводком 13 через шлиц-шарнир 14 с валом 11, причем к неподвижной части 7 вращающегося кольца 6 под полуосью 19 жестко закреплен рычаг 16 для продольного управления, под 90 градусов по окружности неподвижной части 7 также жестко закреплен рычаг 15 для поперечного управления, при этом оба рычага 15, 16 соединены тягами и рычажными качалками с ручкой управления в кабине вертолета, а рукоятка шаг-газ соединена с эксцентриком 17. Таким образом, происходит управление вертолетом.
Предлагаемое изобретение по сравнению с прототипом и другими известными техническими решениями имеет следующие преимущества:
- упрощение и удешевление деталей изготовления механизма автомата перекоса вертолета;
- повышение надежности;
- снижение трудозатрат по обслуживанию вертолета;
- увеличение хода от (-21°) до (+35°) угла атаки лопастей за счет введения лифтовых направляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2662621C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| ВЕРТОЛЕТ | 2004 |
|
RU2263607C1 |
Изобретение относится к авиационной технике, в частности к механизмам автомата перекоса вертолета. Механизм автомата перекоса вертолета состоит из двух параллельно расположенных в одной плоскости лифтовых направляющих (1), жестко закрепленных на раме (2) вертолета, невращающегося кольца (3), вращающегося кольца (6). На нижних частях лифтовых направляющих установлены эксцентрики (17), соединенные штангами (18) с полозами (5). Невращающееся кольцо (3) соединено полуосями (4) с полозами (5), которые установлены внутри лифтовой направляющей (1). Внутри невращающегося кольца (3) установлено вращающееся кольцо (6) с тарелью (9), к которой крепятся тяги (10), с помощью которых происходит изменение угла атаки лопастей. Рычаги (15) и (16) для поперечного и продольного управления соединены тягами и рычажными качалками с ручкой управления в кабине вертолета, а рукоятка шаг-газ соединена с эксцентриками 17. Достигается увеличение хода углов атаки лопастей. 3 ил.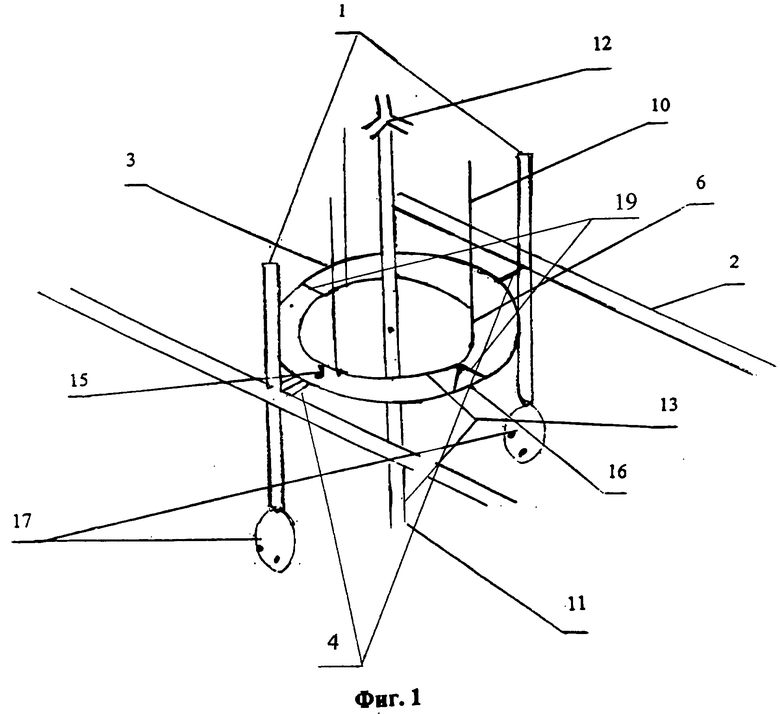
Механизм автомата перекоса вертолета, содержащий раму, вал, невращающесся и вращающееся кольца, поводок, тарель с вертикальными тягами, рычаги поперечного и продольного управления, штангу с полозом, ручку управления с рычажными качалками и рукоятку шаг-газ, отличающийся тем, что он дополнительно снабжен двумя параллельно расположенными в одной плоскости лифтовыми направляющими и эксцентриками, установленными в нижних частях последних, каждый из которых с помощью штанги соединен с полозом, при этом лифтовые направляющие жестко закреплены на раме, а на полозе установлено невращающееся кольцо, которое соединено полуосью с полозом с возможностью поворота на полуосях, при этом полоз установлен внутри лифтовой направляющей, причем внутри иевращающегося кольца установлено вращающееся кольцо с впрессованным в последнюю подшипником, а во внутреннюю обойму подшипника жестко установлена тарель с закрепленными на последней вертикальными тягами, которые соединены с лопастями, при этом рычаги поперечного и продольного управления соединены тягами и рычажными качалками с ручкой управления, а рукоятка шаг-газ соединена с обоими эксцентриками.
| Способ приклеивания резиновой подошвы к верху обуви | 1949 |
|
SU84341A1 |
| Устройство управления несущим винтом модели вертолета | 1986 |
|
SU1397375A1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1988 |
|
SU1828001A1 |
| СПОСОБ, УСТРОЙСТВО И ОБОРУДОВАНИЕ ДЛЯ РАСПОЗНАВАНИЯ ПРЕПЯТСТВИЙ ИЛИ ЗЕМЛИ И УПРАВЛЕНИЯ ПОЛЕТОМ, И НОСИТЕЛЬ ДАННЫХ | 2019 |
|
RU2768997C1 |
| Аналого-цифровой преобразователь | 1981 |
|
SU1046929A1 |

