Изобретение относится к авиационной технике и может быть использовано в вертолетостроении.
Известна соосная несущая система, содержащая редуктор, на валах и картере которого смонтированы втулки несущих винтов, два неподвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей через установленные на ползушках качалки и устройство для изменения общего и дифференциального шага лопастей с помощью подвижных в осевом направлении тяг управления, расположенных внутри полого вала и связанных с ползушками с помощью пальцев, проходящих через сквозные прорези в вале верхнего винта. Наличие сквозных прорезей в вале верхнего винта, необходимых для перемещения ползушек, существенно снижает динамическую прочность вала верхнего винта (см. Вертолет, КА-26, стр.107-110, Москва, издательство "Транспорт", 1982 г.).
Известна другая соосная несущая система, в которой отсутствует указанный недостаток, так как управление несущими винтами осуществляется без применения тяг, проходящих внутри вала верхнего винта и соответственно в валу верхнего винта отсутствуют снижающие прочность прорези (см. заявку на изобретение ОАО "Камов" №2004109704/11 (010601) от 01.04.04 г. Решение о выдаче патента от 2.06.05 г.). Указанная соосная несущая система является наиболее близким прототипом к предложенному техническому решению.
Эта соосная несущая система, содержащая редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей с помощью рычажных качалок, а с управлением общим и дифференциальным шагом через суммирующий рычажный механизм.
Недостатком указанной несущей системы является сложность управления, связанная с наличием в проводке к каждой лопасти работающих на изгиб качалок, а также наличием на качалках требующих технического обслуживания шарниров. Более отрицательно это сказывается на работе верхнего несущего винта, так как цепь управления к нему более длинная и количество шарниров больше.
Технической задачей настоящего изобретения является повышение надежности соосной несущей системы за счет упрощения конструкции, повышения жесткости проводки управления к верхнему винту, снижения трудоемкости обслуживания за счет уменьшения количества кинематических элементов между верхним автоматом перекоса и верхним несущим винтом.
Эта цель достигается тем, что в соосной несущей системе, содержащей редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой общего и дифференциального шага, втулки несущих винтов выполнены двухлопастными с общим горизонтальным шарниром, поводки лопастей втулки нижнего винта связаны с нижним автоматом перекоса через качалки, смонтированные на расположенной под втулкой нижнего винта ползушке, а поводки лопастей втулки верхнего винта соединены тягами непосредственно с верхним автоматом перекоса, при этом радиусы поводков на втулке верхнего винта выполнены большими, чем на втулке нижнего винта, а нижний автомат перекоса и ползушка кинематически связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систему, в которой один рычаг связан одним плечом с управлением дифференциальным шагом, а вторым - с ползушкой, а второй рычаг, шарнирно закрепленный на первом, соединен своими плечами с управлением общим шагом и нижним автоматом перекоса.
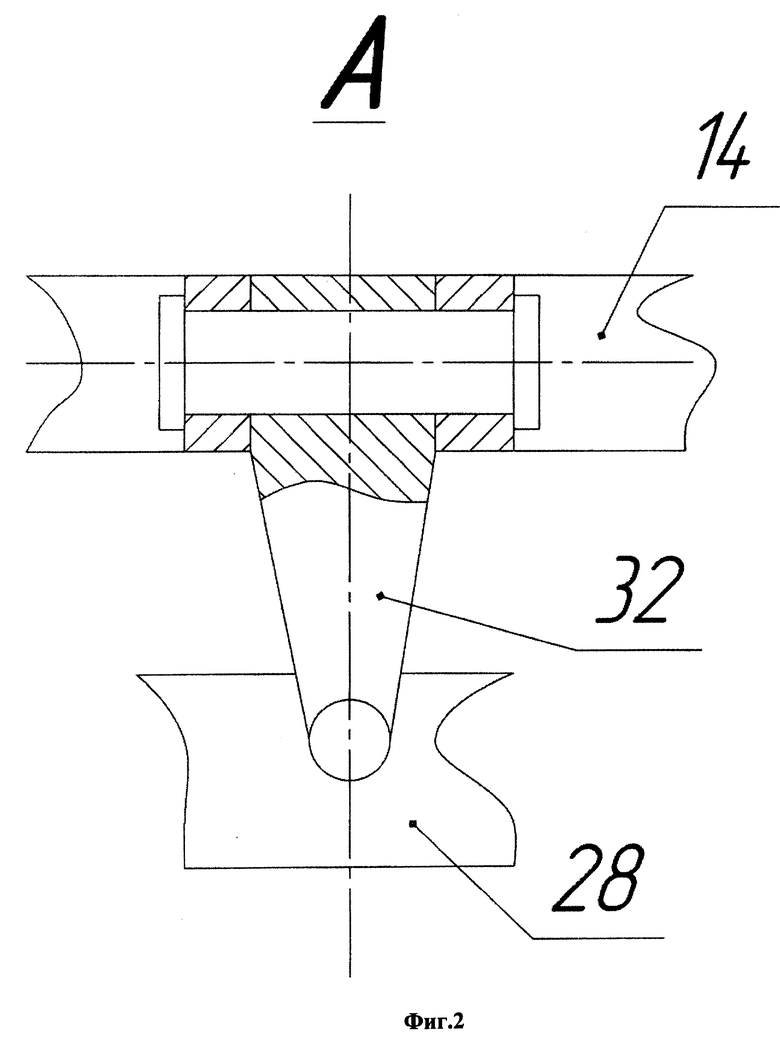
Изобретение поясняется чертежами, где на фиг.1 схематически изображена предлагаемая соосная несущая система, а на фиг.2 - вид А.
Соосная несущая система состоит из редуктора 1 с двумя валами 2 и 3 противоположного вращения, на которых смонтированы втулки несущих винтов 4 и 5, на которые устанавливаются лопасти.
Втулки несущих винтов 4 и 5 выполнены двухлопастными с общими горизонтальными шарнирами 6 и 7, которые не нагружены центробежной силой.
Такие винты выполняются также без вертикальных шарниров, что значительно упрощает конструкцию втулок несущих винтов.
Система управления несущими винтами содержит два соединенных между собой тягами 8 и подвижных в осевом направлении автоматов перекоса 9 и 10.
Поводки лопастей 11 втулки нижнего винта 5 связаны с нижним автоматом перекоса 9 тягами 12, 13 через качалки 14, смонтированные на ползушке 15, установленной на стакане 16 редуктора 1.
Поводки лопастей 17 втулки верхнего винта 4 соединены тягами 18 непосредственно с верхним автоматом перекоса.
Одинаковые величины передаточных отношений между осевыми шарнирами 19 и 20 втулок несущих винтов 4 и 5 и автоматами перекоса 9 и 10 обеспечиваются выполнением радиусов поводков 17 на втулке верхнего винта большими, чем на поводках 11 на втулке нижнего винта. Это значит, что кинематика системы управления подбирается таким образом, чтобы при даче общего, дифференциального или циклического шага изменение углов установки на верхнем и на нижнем винте происходило на одинаковые величины.
Нижний автомат перекоса 9 и ползушка 15 связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систему 21, она содержит рычаг 22, шарнирно установленный на носке редуктора 1 и с одной стороны связанный с ползуном 23 ползушки 15, а с другой стороны - с тягой 24, идущей к управлению дифференциальным шагом.
На рычаге 22 шарнирно установлен рычаг 25. Одним своим плечом он соединен с ползуном 26 нижнего автомата перекоса, а вторым - с тягой 27, идущей к управлению общим шагом.
Наружные кольца автоматов перекоса 28 и 29 соединены шлиц-шарнирами 30 и 31 с корпусом втулки нижнего винта.
Тяга 12 снабжена на концах шарнирными (сферическими) подшипниками, в то время как вторая тяга, соединяющая вторую качалку 14 с наружным кольцом 28 автомата перекоса 9, выполнена в виде поводка 32, способного передавать усилие в плоскости вращения от наружного кольца нижнего автомата перекоса на качалку 14 (см. Вид А).
Внутреннее кольцо 33 автомата перекоса 10 связано с шлиц-шарниром 34 с валом 3.
С системой управления циклическим шагом автомат перекоса 9 соединен тягой 35.
При работе валы 2 и 3 редуктора 1 с установленными на них несущими винтами вращаются в разные стороны, при этом наружные кольца 28 и 29 автоматов перекоса через шлиц-шарниры 30, 31, а качалки 14 ползушки 15 через поводок 32 связаны с нижним несущим винтом и вращаются с ним в одну сторону, например против часовой стрелки, а внутреннее кольцо 33 автомата перекоса 10, будучи связано шлиц-шарниром 34 с валом 3, вращается с этим валом и верхним несущим винтом в противоположную сторону, т.е. по часовой стрелке.
Управление циклическим шагом осуществляется путем наклона автоматов перекоса тягой 35 от системы управления циклическим шагом, при этом циклическое изменение углов установки лопастей нижнего винта 5 производится тягами 12, 13 и поводком 32 через качалки 14 от автомата перекоса 9, а изменение углов установки на верхнем винте 4 от автомата перекоса 10 непосредственно тягами 18, а так как величины передаточных отношений между осевыми шарнирами и автоматами перекоса выбраны одинаковыми, то циклические изменения углов установки на одинаковых азимутах обеих винтов будут одинаковыми.
Управление общим шагом осуществляется от тяги 27, которая поворачивает рычаг 25 суммирующей рычажной системы 21, при этом движение передается на ползун 26 автомата перекоса 9, и оба автомата перекоса, связанные друг с другом соединительными тягами 8, одновременно перемещаются на одну и ту же величину. Так как передаточные отношения между автоматами перекоса и осевыми шарнирами подобраны одинаковыми, то при осевом перемещении автоматов перекоса происходит одновременное увеличение или уменьшение углов установки на лопастях верхнего и нижнего винтов на одинаковую величину.
Управление дифференциальным шагом, т.е. увеличение углов установки (шага) лопастей одного из несущих винтов при одновременном уменьшении на ту же величину шага другого несущего винта, осуществляется следующим образом.
Перемещением тяги 24 от системы управления дифференциальным шагом поворачивается рычаг 22 суммирующей рычажной системы 21, при этом происходит также поворот рычага 25 вокруг шарнира 36, что приводит к одновременному перемещению автоматов перекоса 9 и 10 и ползушки 15 в разные стороны, при этом необходимое изменение углов установки на верхнем винте достигается за счет осевого перемещения автоматов перекоса, в то же время как на нижнем винте изменение угла установки в противоположную сторону и на тот же угол достигается за счет большей скорости перемещения ползушки относительно автоматов перекоса.
Эта разница в скоростях обеспечивается за счет подбора плеч рычагов 22, 25.
Предложенная соосная несущая система позволяет выполнить втулки несущих винтов и систему управления более простой и надежной, а уменьшение количества конструктивных элементов повышает жесткость проводки управления и снижает трудозатраты на обслуживание.
| название | год | авторы | номер документа |
|---|---|---|---|
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2662621C1 |
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
Изобретение относится к авиационной технике и может быть использовано в вертолетостроении. Соосная несущая система содержит редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов. Два соединенных между собой и подвижных в осевом направлении автомата перекоса кинематически связаны с поводками лопастей и суммирующей рычажной системой общего и дифференциального шага. Втулки несущих винтов выполнены двухлопастными с общими горизонтальными шарнирами, поводки лопастей втулки нижнего винта связаны с нижним автоматом перекоса через качалки, смонтированные на расположенной под втулкой нижнего винта ползушке. Поводки лопастей втулки верхнего винта соединены тягами непосредственно с верхним автоматом перекоса. Радиусы поводков на втулке верхнего винта выполнены большими, чем на втулке нижнего винта. Нижний автомат перекоса и ползушка кинематически связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систему, в которой один рычаг связан одним плечом с управлением дифференциальным шагом, а вторым с ползушкой. Второй рычаг, шарнирно закрепленный на первом, соединен своими плечами с управлением общим шагом и с ползуном нижнего автомата перекоса. Достигается повышение надежности соосной несущей системы. 2 ил.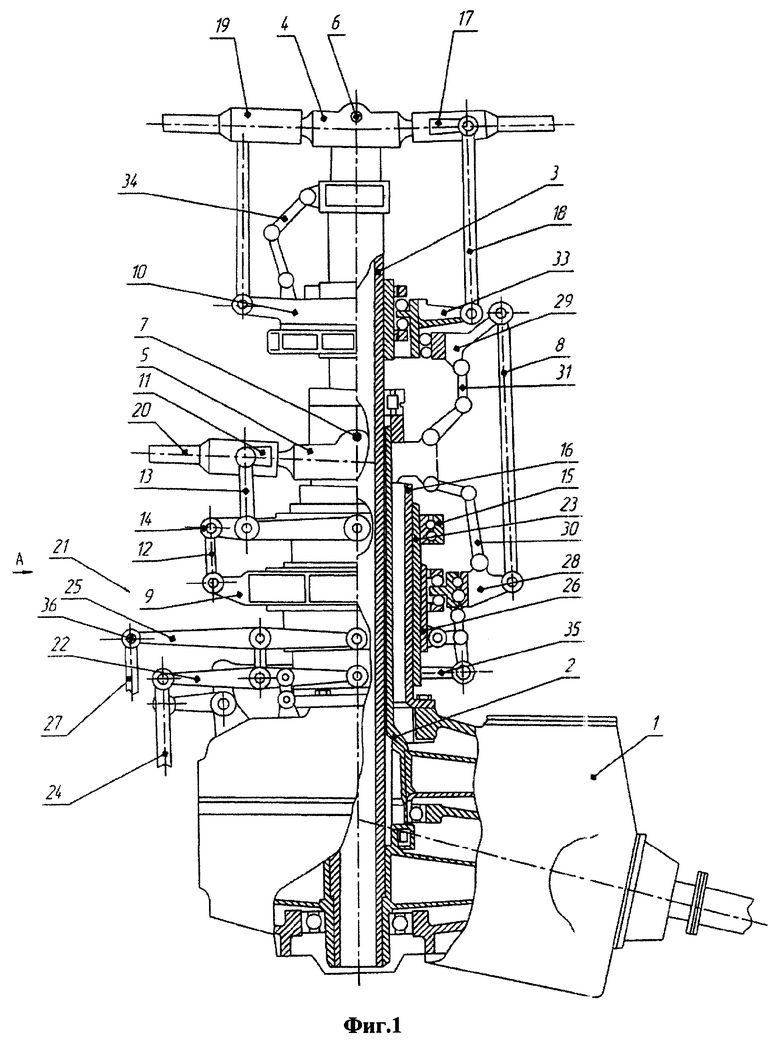
Соосная несущая система, содержащая редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой общего и дифференциального шага, отличающаяся тем, что втулки несущих винтов выполнены двухлопастными с общими горизонтальными шарнирами, поводки лопастей втулки нижнего винта связаны с нижним автоматом перекоса через качалки, смонтированные на расположенной под втулкой нижнего винта ползушке, а поводки лопастей втулки верхнего винта соединены тягами непосредственно с верхним автоматом перекоса, при этом радиусы поводков на втулке верхнего винта выполнены большими, чем на втулке нижнего винта, а нижний автомат перекоса и ползушка кинематически связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систему, в которой один рычаг связан одним плечом с управлением дифференциальным шагом, а вторым - с ползушкой, а второй рычаг, шарнирно закрепленный на первом, соединен своими плечами с управлением общим шагом и с ползуном нижнего автомата перекоса.
| ВАХИТОВ А.В | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| - М.: ТРАНСПОРТ, 1973, с.58-65 | |||
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| GB 1188345 А, 15.04.1970. | |||

