Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению.
Известен кран-манипулятор, содержащий шасси с установленным на нем опорным устройством, поворотную стрелу с приводом ее подъема и грузозахватный орган, а также пульт управления краном, в котором на шасси дополнительно установлена жестко связанная с опорным устройством траверса, которая шарнирно соединена с механизмом поворота с расположенной на нем с возможностью вращения относительно вертикальной оси устройства колонной, причем колонна шарнирно соединена с последовательно установленными и шарнирно связанной стрелой и коленом с телескопической штангой, на конце которой размещен грузозахватный орган, а опорное устройство состоит из балки и размещенных по ее краям выносных опор, установленных с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях, при этом привод перемещения выносных опор в вертикальной плоскости, привод механизма поворота крана, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги выполнены в виде гидроцилиндров, соединенных гидролиниями с баком и пультом управления в виде гидрораспределителя; выносные опоры выполнены в виде аутригеров (RU, авторское свидетельство № 17526. U1. М. кл.7 В66С 23/04. Кран-манипулятор / Н.Ф.Швец, А.О.Самоухин, С.А.Мозговой, Ю.И.Тюрин, М.Н.Сафонов (RU). - Заявка № 2000131405/20. Заявлено 18.12.2000; Опубл. 10.04.2001, Бюл. № 10 // Изобретения. Полезные модели. - 2001. - № 10).
К недостаткам описанного крана-манипулятора, несмотря на расширение зоны обслуживания, относятся низкая производительность даже при перевалке насыпного груза. Производительность данного крана-манипулятора определяется скоростями гидроцилиндров 16 и 17 управления стрелы 9 и рукояти 10.
Наиболее близким аналогом к заявленному объекту относится манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, в котором колонка выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости, которых перекрестно сообщены гидравлически между собой, установлены разнонаправлено и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, а основание другого - на дополнительной балке плоского основания (RU, патент № 2158207. С1. МПК7 В60Р 1/54, А01D 90/02. Манипулятор / Н.Г.Кузнецов, A.M.Салдаев, Г.А.Салдаев, А.Ф.Рогачев (RU). - Заявка № 99104419/13. Заявлено 09.03.1999. Опубл. 27.10.2000, Бюл. № 30 // Изобретения. - 2000. - № 30).
К недостаткам описанного манипулятора относятся низкая производительность.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - повышение рабочей скорости подъема и опускания грузоподъемного крюка на конце рукояти.
Технический результат - повышение производительности.
Указанный технический результат достигается тем, что в известном манипуляторе, включающем плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, согласно изобретению грузозахватный крюк с концом рукояти связан подвижным канатом, на концах единого куска каната посредством фиксаторов образованы верхняя и нижняя петли, нижняя петля размещена с охватом на блоке установленного в кронштейне над траверсой грузозахватного крюка, верхняя петля смонтирована с охватом на блоке, размещенного на неподвижной оси П-образного кронштейна, сопряженного с передним концом рукояти, а подвижные части ветвей каната размещены на попарно установленных неподвижных и подвижных блоках, при этом вторая подвижная пара блоков смонтирована на подвижной оси, размещенной посредством сферического шарнира на конце штока силового гидроцилиндра, смонтированного основанием посредством сферического шарнира, задней оси и кронштейнов на другом конце рукояти, при этом названные подвижная и задняя оси, снабженные возможностью взаимного перемещения, кинематически связаны тягами; шток силового гидроцилиндра размещен на подвижной оси между смежными блоками; каждая тяга снабжена продольным пазом; осевое перемещение концов тяг на подвижной оси ограничено монтажными втулками, размещенными между подвижными блоками и планками, фиксируемыми на концах тяг и размещенными в пазах на концах подвижной оси; осевое перемещение тяг на задней оси ограничено дисками, фиксируемыми на торцах задней оси; рабочее положение силового гидроцилиндра зафиксировано на рукояти транспортным кронштейном.
Изобретение поясняется чертежами.
На фиг.1 схематично изображен манипулятор с трактором, приведенными в рабочее положение, вид сбоку.
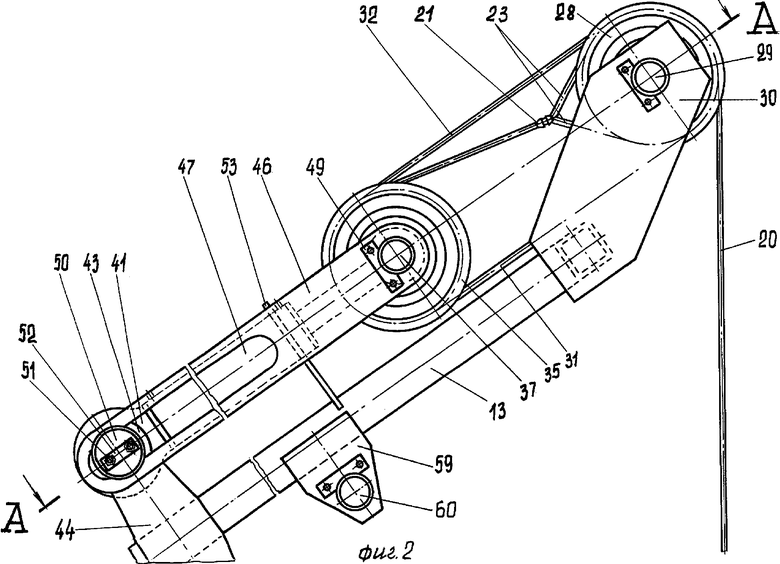
На фиг.2 показана рукоять с силовым гидроцилиндром на одном конце рукояти, неподвижными блоками на оси другого конца рукояти и подвижным блоком с ветвями подвижного каната, вид слева.
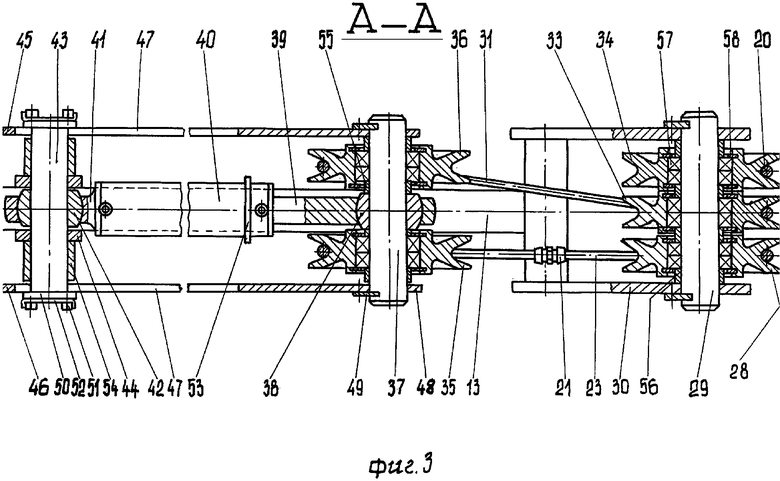
На фиг.3 - сечение А-А на фиг.2.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Манипулятор (см. фиг.1) содержит плоское основание 1 с кронштейнами навески 2, 3 и выдвижными левой и правой опорами 4. Плоское основание 1 посредством кронштейнов навески 2 и 3 и тяг 5 и 6 шарнирно связано с рамой трактора 7. Силовым гидроцилиндром 8 через тяги 5 и 6 гидронавесной системы трактора 7 производится подъем плоского основания 1 в транспортное положение. Опорно-поворотная колонка 9 закреплена с возможностью поворота вокруг осей 10 и 11 основания 1. На опорно-поворотной колонке 9 смонтированы шарнирно стрела 12, рукоять 13 и грузозахватный крюк 14. Дистанционное управление стрелой 12 и рукоятью 13 производится попарно установленными силовыми гидроцилиндрами 15 и 16. Основание 1 и опорно-поворотная колонка 9 связаны шарнирно дополнительными гидроцилиндрами 17 и 18 механизма поворота 19 опорно-поворотной колонки 9.
Грузозахватный крюк 14 с концом рукояти 13 (см. фиг.1-3) связан подвижным канатом 20. На концах единого куска каната 20 посредством фиксаторов 21 и 22 образованы верхняя петля 23 и нижняя петля 24. Нижняя петля 24 размещена с охватом на блок 25 установленного в кронштейне 26 над траверсой 27 грузозахватного крюка 14 (см. фиг.1).
Верхняя петля 23 смонтирована с охватом на блоке 28 (см. фиг.2 и 3). Блок 28 размещен на неподвижной оси 29 П-образного кронштейна 30. П-образный кронштейн в виде двух щек и балки сопряжен с торцом переднего конца рукояти 13 и соединен сварными швами. Подвижные части ветвей 31 и 32 каната 20 размещены на попарно установленных неподвижных на оси 29 и вращающихся на ней блоках 33 и 34 и подвижных блоках 35 и 36. Вторая пара подвижных блоков 35 и 36 смонтирована на подвижной оси 37 с возможностью свободного вращения и поступательного перемещения вдоль рукояти 13.
Таким образом, вертикально ориентированная часть ветви каната 20, на которой свисает грузозахватный крюк 14, укладывается на блок 34, с блока 34 плавно поступает на блок 36, а с блока 36 сходит ветвь 31 каната 20 на смежный блок 33 на оси 29. Далее с блока 33 ветвь 32 каната 20 поступает на блок 35, размещенный на подвижной оси 37 и с блока 35 входит в фиксатор 21 и петлей 23 размещен на блоке 28, который не вращается на оси 29, а лишь качается.
Подвижная ось 37 размещена посредством сферического шарнира 38 на конце штока 39 силового гидроцилиндра 40. Силовой гидроцилиндр 40 основанием 41 и посредством сферического шарнира 42, задней оси 43 и кронштейнов 44 размещен на другом конце рукояти 13. Названные подвижная ось 37 и задняя ось 43, снабженные возможностью взаимного перемещения благодаря силовому гидроцилиндру 40, кинематически связаны тягами 45 и 46. Каждая тяга 45 (46) снабжена продольным пазом 47. Длина паза 47 короче на 5...8 мм, чем длина хода штока 39 силового гидроцилиндра 40.
Осевое перемещение концов тяг 45 и 46 на подвижной оси 37 ограничено с одной стороны монтажными втулками 48, размещенными между подвижными и вращающимися блоками 35 и 36, и планками 49, фиксируемыми на концах тяг 45 и 46 и размещаемыми в пазах на концах подвижной оси 37 (см. фиг.3). Осевое перемещение задних, подвижных на оси 43, тяг 43, размещенных на задней оси 43 в паре кронштейнов 44, ограничено дисками 50. Каждый диск 50 на торце задней оси 43 закреплен средствами крепления 51 и зафиксирован стопором в виде полосы 52.
Рабочее положение силового гидроцилиндра 40 на рукояти 13 зафиксировано транспортным кронштейном 53.
Шток 39 силового гидроцилиндра 40 размещен на подвижной оси 37 между смежными блоками 35 и 36.
Параллельное положение тяг 45 и 46 и их возможное перемещение на задней оси 43 достигнуто дистанционными втулками 54 для оси 43 и распорными втулками 55 на подвижной оси 37. Требуемое положение блоков 28, 33 и 34 на неподвижной оси в П-образном кронштейне 30 достигнуто втулками 56 (см. фиг.3).
Каждый блок 28, 33, 34, 35, 36 на осях 29 и 37 размещен на паре радиальных подшипников 57. Подшипники 57 в ступицах блоков 28, 33-36 зафиксированы опорными кольцами 58. Конструкция блока 25 в кронштейне 26 идентична конструкции блоков 28, 33-36.
Рукоять 13 посредством кронштейна 59 и оси 60 соединена шарнирно со штоком силового гидроцилиндра 16. Стрела 12 с рукоятью 13 посредством оси в кронштейне 44 взаимно шарнирно сопряжены и обеспечивают широкий диапазон вертикальных и радиальных перемещений грузозахватного крюка 14.
Манипулятор работает следующим образом.
После приведения плоского основания 1 в рабочее состояние силовыми гидроцилиндрами 15 проверяют работу стрелы 12, силовыми гидроцилиндрами 16 работу рукояти 13, силовыми гидроцилиндрами 17 и 18 механизма 19 поворота опорно-поворотной колонки 9, а далее включают в работу силовой гидроцилиндр 40 на рукояти 13.
При подаче масла в штоковую полость силового гидроцилиндра 40 его шток 39 плавно втягивается в его полость, а расстояние между задней осью 43 в кронштейнах 44 и подвижной осью 37 уменьшается. Перемещение подвижной оси 37 в направлении задней оси 43 приводит к тому, что блоки 35 и 36 на оси 37 удаляются от блоков 33 и 34 на неподвижной оси 29, смонтированной на П-образном кронштейне 30. Увеличение расстояния между осями 37 и 29 приводит к тому, что ветви 31 и 32 каната 20 перекатываются на блоках 34, 35 и 36, при этом указанные блоки на осях 37 и 29 вращаются в разных направлениях благодаря подшипниковым опорам 57 (см. фиг.3).
Канат 20 последовательно огибает неподвижные блоки 34 и 33 оси 29 и подвижные блоки 36 и 35 на оси 37. Усилие, развиваемое силовым гидроцилиндром 40 на его штоке 39, передается ветвями 31 и 32 на канат 20, свисающий вертикально с крайнего блока 34. Усилие подъема вертикально ориентированной ветвью каната 20 и, следовательно, грузозахватным крюком 14 на его нижнем конце примерно в четыре раза больше, развиваемого на конце штока 39 силового гидроцилиндра 40, за минусом сил трения и наклона отдельных ветвей каната 20. При этом путь оси 37 вдоль рукояти 13 примерно в четыре раза меньше, чем вертикальное перемещение грузозахватного крюка 14. Таким образом, скорость подъема груза крюком 14 в четыре раза больше скорости перемещения штока 39 в силовом цилиндре 40.
Петли 23 и 24 на блоках 28 и 25 обеспечивают плавное сопряжение ветвей каната 20 на них, а фиксаторы 21 и 22 - надежное фиксирование концов каната 20, что обеспечивает высокую эксплуатационную надежность запасовки концов каната 20.
Пазы 47 на тягах 45 и 46 обеспечивают свободное перемещение подвижной оси 37 с блоками 35 и 36 на ней, а сами тяги 45 и 46 исключают аварийные ситуации в гидроприводе грузозахватного крюка 14.
Транспортный кронштейн 53 удерживает силовой гидроцилиндр 40, его шток 39, ось 37 с блоками 35 и 36 в заданном положении и обеспечивает нормальную работу ветвей 31 и 32 каната 20 при подъеме и опускании грузозахватного крюка 14 с грузом и при холостых перемещениях.
Представленная совокупность конструктивных решений обеспечивают четырехкратное повышение рабочей скорости подъема перемещаемых грузов и тем самым производительность манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению. Манипулятор содержит плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки. Грузозахватный крюк с концом рукояти связан подвижным канатом. На концах единого куска каната посредством фиксаторов образованы верхняя и нижняя петли. Нижняя петля размещена с охватом на блоке установленного в кронштейне над траверсой грузозахватного крюка. Верхняя петля смонтирована с охватом на блоке размещенного на неподвижной оси П-образного кронштейна, сопряженного с передним концом рукояти. Подвижные части ветвей каната размещены на попарно установленных неподвижных и подвижных блоках. Вторая подвижная пара блоков смонтирована на подвижной оси, размещенной посредством сферического шарнира на конце штока силового гидроцилиндра, смонтированного основанием посредством сферического шарнира, задней оси и кронштейнов на другом конце рукояти. Подвижная ось и задняя ось, снабженные возможностью взаимного перемещения, кинематически связаны тягами. Достигается повышение производительности. 5 з.п. ф-лы, 3 ил.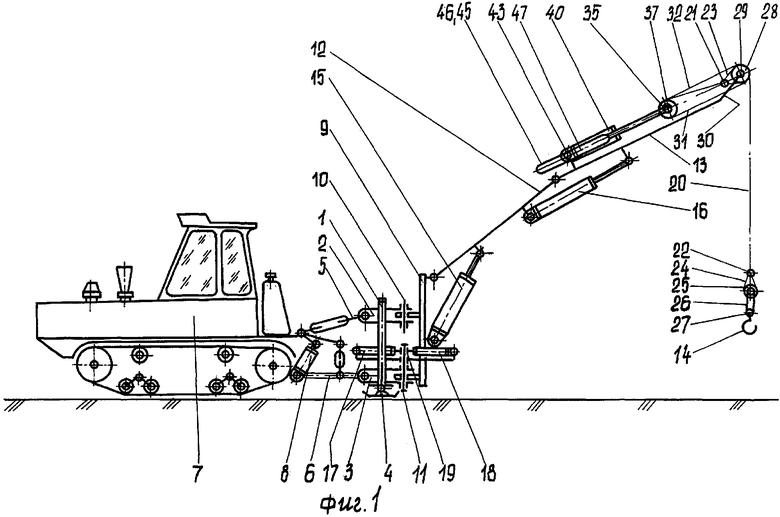
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВЫХ | 0 |
|
SU175628A1 |
| WO 8504386 А1, 10.10.1985 | |||
| JP 11123978 А, 11.05.1999. | |||

