Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению.
Известен консольный кран, содержащий опорную колонну, несущую консоль с грузозахватным механизмом и поворотным шарниром, в котором смонтировано тормозное устройство, состоящее из втулки с тормозными дорожками, взаимодействующими с дорожками тормозных элементов, в котором, с целью обеспечения регулирования подтормаживания консоли в зависимости от веса перемещаемого груза, тормозные элементы выполнены в виде колец треугольного сечения, а тормозное устройство снабжено установленными с возможностью рационального перемещения клинообразными толкателями, взаимодействующими с указанными кольцами (SU, авторское свидетельство № 630205. Консольный кран / В.Г.Дедов, С.И.Искрин (СССР). - Заявка № 2488904/29-11; заявлено 18.05.1977; Опубл. 30.10.1978, Бюл. № 40 // Открытия. Изобретения. - 1978. - № 40).
К недостаткам описанного консольного крана, несмотря на наличие "чистого подъема" грузозахватного средства с использованием ручного труда, относятся малая зона обслуживания и стационарность положения опорной колонны.
Наиболее близким аналогом к заявленному объекту относится манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, в котором колонка выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости которых перекрестно сообщены гидравлически между собой, установлены разнонаправлено и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, а основание другого - на дополнительной балке плоского основания (RU, патент № 2158207. С1. МПК7 В60Р 1/54, А01D 90/02. Манипулятор / Н.Г.Кузнецов, А.М.Салдаев, Г.А.Салдаев, А.Ф.Рогачев (RU). - Заявка № 99104419/13; заявлено 09.03.1999; Опубл. 27.10.2000, Бюл. № 30 // Изобретения. - 2000. - №30).
К недостаткам описанного манипулятора, несмотря на увеличение зоны обслуживания, относятся отсутствие "чистого" подъема при выполнении погрузочно-разгрузочных работ. Это приводит к травмам и повреждению товара.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - обеспечение "чистого" подъема и опускания перемещаемого груза стрелой и рукоятью манипулятора.
Технический результат - повышение качества выполнения погрузочно-разгрузочных работ.
Указанный технический результат достигается тем, что в известном манипуляторе, содержащем плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости которых перекрестие сообщены гидравлически между собой, установлены разнонаправлено и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, и основание другого - на дополнительной балке плоского основания, согласно изобретения, грузозахватный крюк с концом рукояти кинематически связан силовым гидроцилиндром и канатом, при этом верхний и нижний концы каната зафиксированы блокираторами с образованием петель, нижняя петля каната установлена с охватом на блоке, размещенном шарнирно на оси над траверсой грузозахватного крюка в Н-образном кронштейне, верхняя петля каната с охватом размещена на основании силового гидроцилиндра и зафиксирована на конце его штока, при этом каждый блокиратор концов каната на его ветви выполнен в виде сопрягаемых резьбовыми участками внешнего и внутреннего дисков с осевыми отверстиями, при этом внутренняя торцевая поверхность внутреннего диска и сопрягаемая с нею внутренняя поверхность внешнего диска образованы вращением ветвей синусоиды, ось абсциссы которой наклонена к оси симметрии дисков, при этом в дополнительной плоскости внутреннего диска на его периферийной части выполнены канавки, глубиной и шириной, равной диаметру каната, осевое отверстие внутреннего диска выполнено резьбовым и сопряжено с концом штока силового гидроцилиндра, параллельно осевому отверстию выполнена пара отверстий под специальный монтажный ключ, а на внешней торцевой части внешнего диска выполнен прилив в виде многогранника под размер рожкового ключа, при этом дугообразная часть верхней петли каната на основании силового гидроцилиндра размещена с помощью направляющей; направляющая и опора верхней части петли каната выполнена в виде двух щек, полукольца и пары цилиндрических штифтов взаимно и с основанием силового гидроцилиндра соединены сварными швами.
Изобретение поясняется чертежами.
На фиг.1 схематично представлен манипулятор, навешенный тягами гидронавесной системы на его шасси и приведенный в рабочее состояние, вид слева.
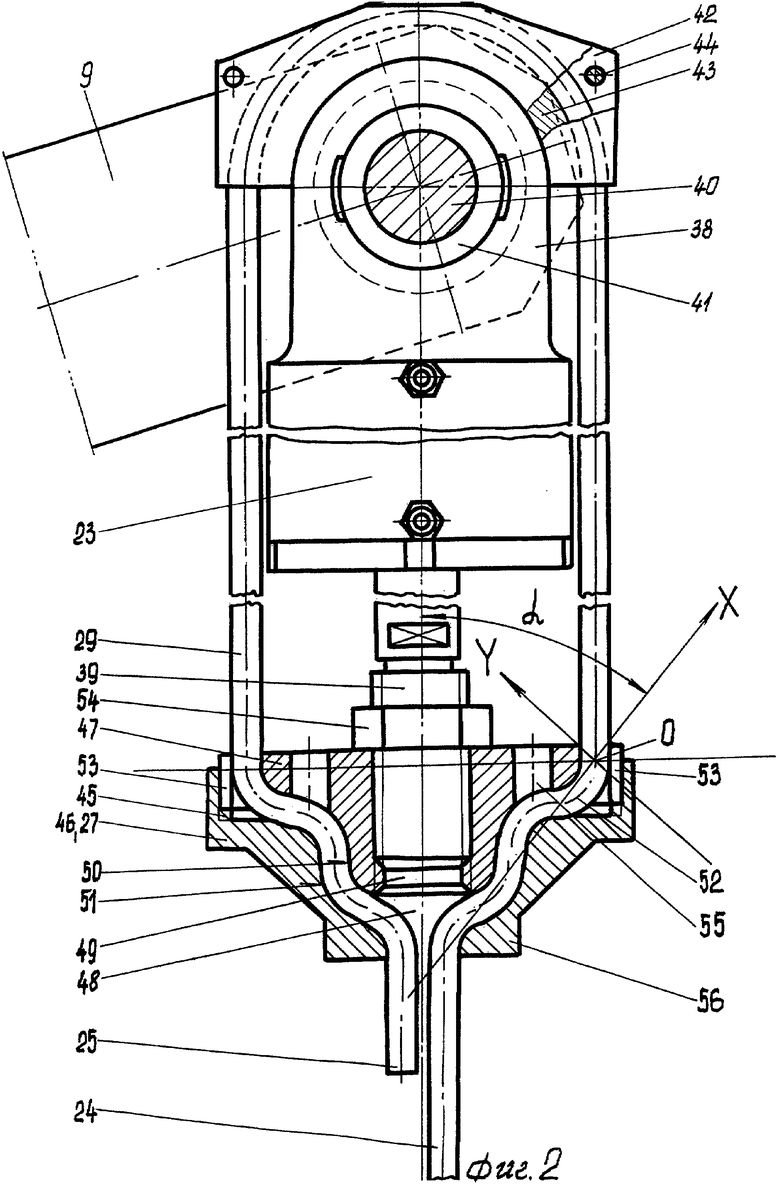
На фиг.2 показан силовой гидроцилиндр, размещенный основанием на конце рукояти манипулятора, и верхняя петля каната, зафиксированная блокиратором на конце штока силового гидроцилиндра.
На фиг.3 изображены грузозахватный крюк на траверсе, блок в Н-образном кронштейне и нижняя петля каната на блоке, концы которого зафиксированы блокиратором.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Манипулятор (см. фиг.1) содержит плоское основание 1 с кронштейнами навески 2, 3 и 4, выдвижными левой и правой опорами 5 и опорно-поворотную колонку 6. Опорно-поворотная колонка 6 закреплена на основании 1 с возможностью поворота вокруг вертикальной оси 7. На опорно-поворотной колонке 6 смонтированы шарнирно стрела 8, рукоять 9, грузозахватный крюк 10, попарно установленные силовые гидроцилиндры 11 и 12 для управления стрелой 8 и рукоятью 9. Основание 1 и опорно-поворотная колонка 6 кинематически связаны дополнительными гидроцилиндрами 13 и 14 механизма поворота опорно-поворотной колонки 6 в виде L-образной балки 15. Горизонтальный брус 16 L-образной балки 15 ориентирован в сторону проушин 17 попарно установленных силовых гидроцилиндров 11 стрелы 8. Нижний срез плоского основания 1 снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов 3 и 4 навески. Удаленные концы горизонтального бруса 16 и дополнительной балки кинематически связаны механизмом поворота колонки 6. Она снабжена двуплечим рычагом 18, ось вращения которого совмещена с вертикальной осью 7 поворота колонки 6. Дополнительные гидроцилиндры 13 и 14, штоковые и бесштоковые полости которых перекрестие гидравлически соединены между собой и параллельно с гидравлической сетью трактора 19, установлены на концах горизонтального бруса 16 и L-образной балки 15 и соединены двуплечим рычагом 18 со штоками. Таким образом, основание дополнительного силового гидроцилиндра 13 посредством шарового шарнира смонтировано на конце горизонтальном брусе 16 L-образной балки 15, а основание силового гидроцилиндра 14 посредством шарового шарнира установлено на дополнительной балке плоского основания 1.
Плоское основание 1 посредством кронштейнов 2, 3, 4 и тяг 20 и 21 навешено на шасси трактора 1 и переводится силовым гидроцилиндром 22 в транспортное положение.
Грузозахватный крюк 10 (см. фиг.1 и 3) с концом рукояти 9 кинематически связан силовым гидроцилиндром 23 и канатом 24. Верхний и нижний концы 25 и 26 каната 24 зафиксированы блокираторами 27 и 28 с образованием петель 29 и 30. Нижняя петля 30 (см. фиг.3) установлена с охватом на блоке 31. Блок 31 размещен шарнирно на оси 32 над траверсой 33 грузозахватного крюка 10 в Н-образном кронштейне 34. Блок 31 на оси 32 смонтирован посредством подшипника скольжения 35. Ось 32 и траверса 33 в Н-образном кронштейне зафиксированы планками 36 и средствами крепления 37. Верхняя петля 29 каната 24 с охватом размещена на основании 38 и на конце штока 39 силового гидроцилиндра 23 (см. фиг.2). Основание 38 силового гидроцилиндра 23 на конце рукояти 9 размещено посредством пальца 40 и сферического шарнира 41.
Дугообразная часть верхней петли 29 каната 24 на основании 38 силового гидроцилиндра 23 размещена с помощью направляющей 42 и опоры 43.
Направляющая 42 и опора 43 верхней дугообразной части ветви верхней тяги 29 каната 24 выполнена в виде двух щек, опоры 43 в виде полукольца и пары цилиндрических штифтов 44. Направляющая 42 и опора 43 соединены сварными швами взаимно и с основанием 38 силового гидроцилиндра 23. Штифты 44 исключают выскальзывание верхней ветви петли 29 из направляющей 42.
Каждый блокиратор 27 (28) концов 25 (26) каната 24 на его вертикальной части ветви выполнен в виде сопрягаемых резьбовыми участками 45 внешнего и внутреннего дисков 46 и 47 с осевыми отверстиями 48 и 49.
Внутренняя торцевая поверхность 50 внутреннего диска 47 и сопрягаемая с нею внутренняя торцевая поверхность 51 внешнего диска 46 блокиратора 27 образованы вращением ветвей синусоиды 52 (см. фиг.2). Ось абсциссы ОХ синусоиды 52 наклонена к вертикальной оси симметрии дисков 46 и 47 под углом α. При сопряжении внешнего и внутреннего дисков 46 и 47 их торцевые поверхности 50 и 51 взаимно и эквидистантно удалены на расстояние, равное диаметру каната 24. В диаметральной плоскости внутреннего диска 47 на его периферийной части выполнены канавки 53, глубиной и шириной, равной диаметру каната 24. Осевое отверстие 49 внутреннего диска 47 выполнено резьбовым и сопряжено с концом штока 39 силового гидроцилиндра 23. Внутренний диск 47 на конце штока 39 зафиксирован контргайкой 54. Параллельно осевому отверстию 49 в диске 47 выполнена пара отверстий 55 под специальный монтажный ключ. На внешней торцевой поверхности внешнего диска 46 выполнен прилив 56 в виде многогранника под размер зева рожкового ключа.
Силовые гидроцилиндры 22, 13, 14, 11, 12 и 23 гидравлически связаны с гидросистемой трактора 19 и управляются гидрозолотниками из кабины трактора 19.
Манипулятор работает следующим образом.
Трактор 19, подъехав к месту погрузочно-разгрузочных работ, силовым гидроцилиндром 22 и тягами 20 и 21 гидронавесной системы трактора 19, опускает плоское основание 1 до соприкосновения левой и правой опор 5 до опорной поверхности площадки. Далее тягой 20 через кронштейн 2 плоское основание 1 устанавливает вертикально в поперечно-вертикальной плоскости симметрии агрегата. Далее, манипулируя спаренными силовыми гидроцилиндрами 11 стрелы 8, гидроцилиндрами 12 рукояти 9 и силовым гидроцилиндром 23 освобождают грузозахватный крюк 10 с транспортного кронштейна на конце L-образной балки 15. Изменяя вылет стрелы 8 и рукояти 9, палец 40 на конце рукояти 40 размещают над поднимаемым грузом. При подаче масла в полость силового гидроцилиндра 23 его шток 39 вместе с канатом 24 опускаются вниз, перемещая вертикально грузозахватный крюк 10, траверсу 33, Н-образный кронштейн 34, ось 32 и блок 31 вместе с нижней петлей 30 каната 24.
Для вертикального подъема груза тракторист подает масло в штоковую полость силового гидроцилиндра 23. При подаче масла шток 39 втягивается в полость силового гидроцилиндра 23, увлекая за собой верхний блокиратор 27 конца 25 каната 24, вместе с канатом 24 перемещается вверх и нижний блокиратор 28, а нижняя петля 30 надежно охватывает блок 31. За счет шарниров, образованных осью 32, траверсой 33 и упорным подшипником в верхней части грузозахватного крюка 10, последний имеет несколько степеней свободы, обеспечивающие "чистый" подъем перемещаемого груза.
При критических нагрузках верхняя петля 29 каната 24 исключает аварийные ситуации при разрыве рукавов высокого давления и трубопроводов в системе подачи масла в силовой гидроцилиндр 23 и обрыв самого штока 39. Аналогичную функцию выполняет нижняя петля 30 на блоке 31. Концы 25 и 26 каната 24 надежно зафиксированы между внутренним диском 47 и внешним диском 46. Канат 24 в местах сопряжении дисков 46 и 47 не перебивается, плавно и многократно огибает сопрягаемые поверхности 50 и 51. Этим достигается высокая степень блокировки концов 25 и 26 каната 24.
Далее, управляя силовыми гидроцилиндрами 13 и 14 механизма поворота, силовыми гидроцилиндрами 11 стрелы 8 и силовыми гидроцилиндрами 12 рукояти 9 перегружаемый груз перемещают в пространстве и строго вертикально вниз опускают в нужном месте. Таким образом, достигается высокое качество выполнения погрузочно-разгрузочных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |

Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению. Манипулятор содержит плоское основание с кронштейнами навески и выдвижными опорами, опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки в виде L-образной балки. Нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески. Удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры установлены разнонаправлено и соединены с ним штоками. Грузозахватный крюк с концом рукояти кинематически связан силовым гидроцилиндром и канатом. Верхний и нижний концы каната зафиксированы блокираторами с образованием петель. Нижняя петля каната установлена с охватом на блоке, размещенном шарнирно на оси над траверсой грузозахватного крюка в Н-образном кронштейне. Верхняя петля каната с охватом размещена на основании и на конце штока силового гидроцилиндра и заблокирована на конце его штока. Каждый блокиратор концов каната на его ветви выполнен в виде сопрягаемых резьбовыми участками внешнего и внутреннего дисков с осевыми отверстиями. Внутренняя торцевая поверхность внутреннего диска и сопрягаемая с нею внутренняя торцевая поверхность внешнего диска образованы вращением ветвей синусоиды, ось абсциссы которой наклонена к оси симметрии дисков. В диаметральной плоскости внутреннего диска на его периферийной части выполнены канавки, глубиной и шириной, равной диаметру каната. Осевое отверстие внутреннего диска выполнено резьбовым и сопряжено с концом штока силового гидроцилиндра. Параллельно осевому отверстию выполнена пара отверстий под специальный монтажный ключ, а на внешней торцевой поверхности внешнего диска выполнен прилив в виде многогранника под размер зева рожкового ключа. Дугообразная часть верхней петли каната на основании силового гидроцилиндра размещена с помощью направляющей и опоры. Достигается повышение качества выполнения погрузочно-разгрузочных работ. 1 з.п. ф-лы, 3 ил.
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| СПОСОБ УПРОЧНЕНИЯ ЗУБЬЕВ ЗУБЧАТОГО КОЛЕСА | 2016 |
|
RU2650263C1 |
| JP 8058462 А, 05.03.1996. | |||

