Изобретение относится к авиационной технике, в частности, к конструкции вертолета с соосными несущими винтами и системе управления этими винтами.
Известны вертолеты с соосными несущими винтами и конструктивные решения управления этими винтами (см. стр.14-18, журнал «Вертолет» №3(18), 2002 г., Казань).
В известных решениях элементы управления смонтированы как на внешней поверхности валов редуктора, на которых установлены несущие винты, так и внутри вала верхнего несущего винта. Причем обвязка валов редуктора элементами управления настолько плотная, что как показывает практика, не позволяет разместить отдельные виды оборудования, например радиолокационную антенну, над плоскостью вращения соосного несущего винта, в отличие от вертолета с одиночным несущим винтом и рулевым винтом.
Этот недостаток системы управления ограничивает решения отдельных задач эксплуатационного применения соосного вертолета. Главным препятствием для размещения оборудования над соосными несущими винтами является проводка управления общим и дифференциальным шагом лопастей.
Как следует из описания системы управления вертолета Ка-26, типичной для большинства соосных вертолетов (см. стр. 108-109 и 128-130, «Вертолет Ка-26», Н.Ф.Суриков, Г.И.Иоффе, А.А.Дмитриев, Е.Г.Пак - М.: Транспорт, 1982 г.), это связано с тем, что элементы проводки управления выполнены в виде двух концентрично установленных, подвижных в осевом направлении и вращающихся вместе с валом тяг, которые полностью занимают внутреннюю полость вала верхнего несущего винта.
Кроме того, механизм управления общим и дифференциальным шагом лопастей, выполненный в виде двух резьбовых стаканов, концентрично и подвижно размещенных в едином корпусе, установлен под нижним картером редуктора по оси вала верхнего несущего винта, а резьбовые стаканы состыкованы с указанными выше тягами. В дополнении к этому, каждый вал несущего винта имеет сквозную прорезь, через которую тяги посредством болтового соединения связаны с элементами управления, выполненными в виде ползушек и установленными на внешней поверхности соответствующих валов.
Другим из известных технических решений (прототипом) является система управления соосным вертолетом по патенту SU №1826422 А1, В 64 С 27/54 от 27.11.89 г., по которому проводка управления общим и дифференциальным шагом лопастей выполнена раздельной, а механизм управления - рычажным. По этому патенту внутри вала верхнего несущего винта расположена подвижная в осевом направлении невращающаяся тяга управления дифференциальным шагом лопастей, которая одним концом соединена с рычажным механизмом, а другим кинематически связана с качалками, размещенными над верхним несущим винтом, и тягами, соединенными с поводками лопастей.
Однако и это техническое решение не позволяет решить задачу размещения оборудования над соосными несущими винтами, т.к. кинематическая связь тяги с качалками, расположенными над верхним несущим винтом, выполнена в виде дифференциального автомата перекоса с дополнительными управляющей качалкой и тягами.
Возникает определенного рода техническое противоречие, с одной стороны, между расположенной внутри вала верхнего несущего винта проводкой управления и соответствующей кинематической связи ее с вращающимися элементами управления (качалками и подводками лопастей) верхним несущим винтом, а, с другой стороны, необходимостью размещения опоры над плоскостью вращения верхнего несущего винта для установки соответствующего оборудования, как, например, радиолокационной антенны, и обеспечение неподвижности и жесткости этой опоры, не нарушая кинематики системы управления.
На устранение этого противоречия и направлено предлагаемое изобретение, в котором решение технической задачи достигается тем, что вертолет, содержащий фюзеляж, силовую установку с трансмиссией и редуктором, на валах которого смонтирован соосный несущий винт, систему управления, в которой дифференциальное управление шагом лопастей выполнено в виде рычажного механизма с расположенной внутри вала верхнего несущего винта подвижной в осевом направлении невращающейся тягой, кинематически связанной с качалками, установленными над верхним несущим винтом и соединенными с поводками лопастей, снабжен полой неподвижной опорой, расположенной внутри вала верхнего несущего винта, которая нижним концом жестко закреплена к корпусу редуктора, а на верхнем конце опоры выполнены сквозные диаметрально расположенные пазы и узлы для установки оборудования, причем тяга рычажного механизма размещена внутри опоры, а кинематическая связь выполнена в виде ползуна, состоящего из двух концентрично охватывающих друг друга втулок, внешняя из которых вращающаяся, при этом ползун установлен на внешней поверхности выступающей из верхнего вала части неподвижной опоры и через сквозные пазы соединен с тягой, а к вращающейся втулке ползуна шарнирно закреплены качалки.
Сущность предлагаемого технического решения поясняется чертежами, где
на фиг.1 представлен общий вид вертолета с оборудованием, размещенным над соосным несущим винтом;
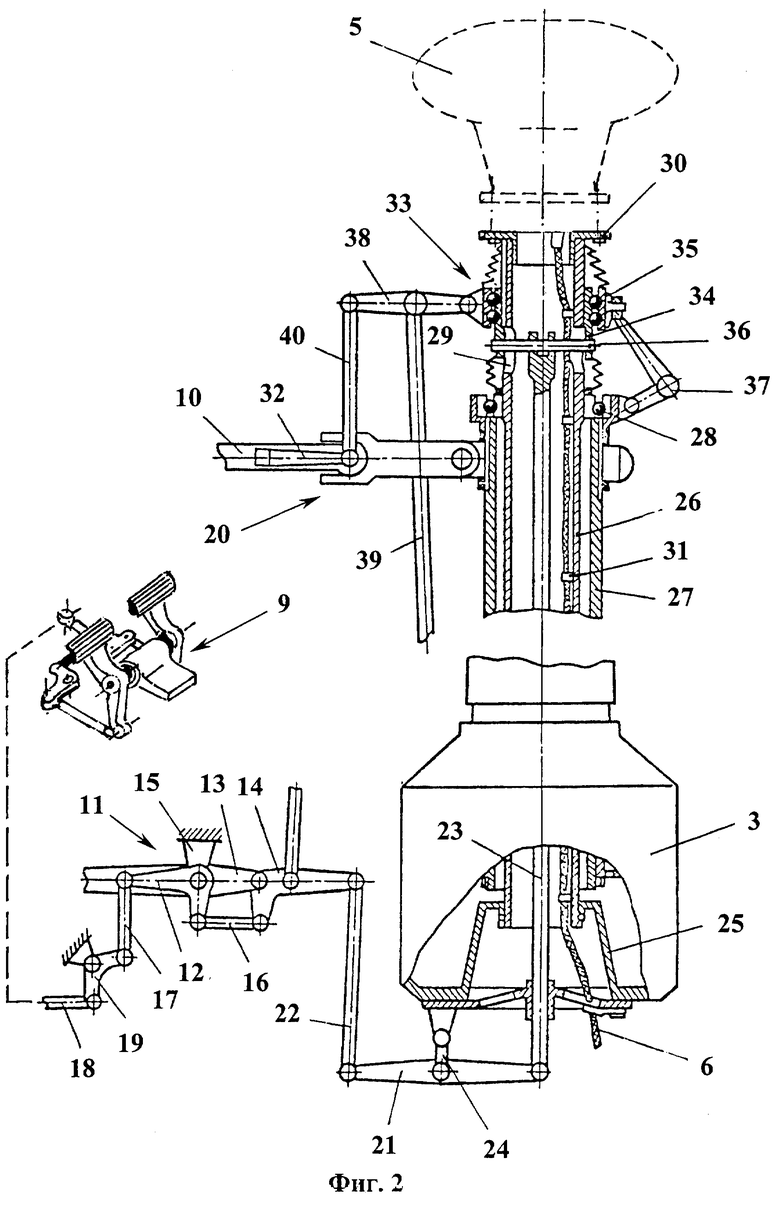
на фиг.2 показано управление дифференциальным шагом лопастей, позволяющее обеспечить размещение оборудования над соосным несущим винтом.
Вертолет содержит фюзеляж 1 с размещенными в нем силовой установкой 2, трансмиссией с редуктором 3, на валах которого смонтирован соосный несущий винт 4 с элементами его управления, оборудование 5, установленное над плоскостью вращения соосного несущего винта и соединенное соответствующими коммуникационными каналами 6 с ответной его частью 7, размещенной в кабине экипажа 8 и/или в фюзеляже.
Система управления соосным вертолетом, в частности канал путевого управления, содержит педали 9, которые связаны с дифференциальным изменением шага лопастей 10 посредством рычажного механизма 11. Рычажный механизм 11 состоит из рычагов 12, 13, 14, два из которых - рычаги 12 и 13 установлены на общей оси, закрепленной посредством кронштейна 15 к конструкции вертолета, а рычаг 14 смонтирован на плече рычага 13. Плечи рычагов 12, 14 соединены тягой 16 и совместно с плечом рычага 13, на котором смонтирован рычаг 14, образуют параллелограммный механизм. Проводка управления от рычажного механизма 11 к педалям 9 путевого управления состоит из тяг 17, 18 и качалки 19. Проводка управления от рычажного механизма 11 к вращающимся элементам управления лопастями 10 верхнего несущего винта 20 включает двуплечий рычаг 21 и тяги 22 и 23. Рычаг 21 посредством промежуточного звена 24 закреплен к корпусу 25 редуктора 3 и одним плечом посредством тяги 22 соединен с рычажным механизмом 11 (рычагом 14), а другим плечом - с тягой 23.
Для обеспечения установки оборудования 5 над плоскостью вращения верхнего несущего винта 20 вертолет снабжен полой неподвижной опорой 26. Опора 26 установлена соосно внутри вала 27 верхнего несущего винта 20, жестко закреплена своим нижним концом к корпусу 25 редуктора 3, а верхним сцентрирована относительно вала 27 при помощи подшипникового узла 28. На выступающей из вала 27 верхней части опоры 26 имеются сквозные диаметрально расположенные пазы 29, а по торцу опоры - узлы 30 для крепления оборудования 5. По внутренней поверхности опоры 26 установлены ложементы 31 для соответствующих коммуникаций 6. Тяга 23 проводки управления от рычажного механизма 11 размещена внутри опоры 26.
Кинематическая связь тяги 23 с поводками 32 управления дифференциальным шагом лопастей 10 выполнена в виде ползуна 33, содержащего две концентрично охватывающие друг друга втулки 34, 35. Ползун 33 установлен на выступающей из вала 27 верхней части опоры 26, причем внутренняя втулка 34 ползуна 33 охватывает опору 26 и имеет шлицевое соединение с опорой, а с помощью штифта (болта) 36, проходящего через сквозные пазы 29 в опоре, соединена с тягой 23. Внешняя втулка 35 выполнена вращающейся относительно внутренней, соединена шлиц-шарниром 37 с валом 27 и к ней шарнирно прикреплены качалки 38 в соответствии с количеством лопастей. Каждая из качалок связана тягой 39 с автоматом перекоса (на чертеже не показан) и тягой 40 соединена с поводком 32 лопасти 10 верхнего несущего винта.
Вертолет, оборудованный выносным над плоскостью вращения соосного несущего винта оборудованием, работает следующим образом.
Например, при установке над плоскостью вращения соосного несущего винта радиолокационной антенны прием информации, передача энергопитания и команд управления осуществляется из кабины экипажа 8 вертолета ответной бортовой частью оборудования 7 через соответствующие коммутационные каналы 6. Размещение выносного оборудования 5 и его коммуникационных каналов 6 по предлагаемому техническому решению не влияет на работу системы управления вертолетом, сохраняя ее эффективность в полном объеме, что характерно для соосного вертолета.
Так, в частности, управление дифференциальным шагом лопастей при путевом управлении вертолетом, при перемещении педалей 9 осуществляется так. При перемещении педалей 9 посредством тяг 17,18 и качалки 19 через параллелограммный механизм поворачивается рычаг 14 рычажного механизма 11, который по кинематической цепи тяга 22, рычаг 21, тяга 23 перемещает ползун 33 (его внутреннюю втулку 34) в ту или иную сторону, при этом вращающаяся втулка 35 ползуна 33 и связанная с ней качалка 38 также перемещаются и в зависимости от состояния автомата перекоса, с которым качалка 38 соединена тягой 39, перемещает через тягу 40 поводок 32, изменяя этим самым угол установки (шаг) лопасти 10.
Система управления общим и циклическим шагом лопастей идентична прототипу и поэтому не описана в материалах заявки.
Техническим результатом, достигаемым при реализации заявленного изобретения, является решение соосным вертолетом качественно новых эксплуатационных задач как в сфере гражданского, так и военного применения. Например, использование вертолета в качестве радиолокационного или телевизионного ретранслятора с круговой панорамой или в качестве разведывательного вертолета с функциями целеуказания при оснащении его соответствующей оптико-электронной прицельной системой, вынесенной над плоскостью вращения соосного несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2005 |
|
RU2307766C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2662621C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
Изобретение относится к авиационной технике, в частности к конструкции вертолета с соосными несущими винтами и системе управления этими винтами. Вертолет содержит фюзеляж, силовую установку с трансмиссией и редуктором, на валах которого смонтирован соосный несущий винт, систему управления, в которой дифференциальное управление шагом лопастей выполнено в виде рычажного механизма с расположенной внутри вала верхнего несущего винта подвижной в осевом направлении невращающейся тягой, кинематически связанной с качалками, установленными над верхним несущим винтом и соединенными с поводками лопастей. Вертолет снабжен полой неподвижной опорой, расположенной внутри вала верхнего несущего винта, которая нижним концом жестко закреплена к корпусу редуктора, а на верхнем конце опоры выполнены сквозные диаметрально расположенные пазы и узлы для установки оборудования. Тяга рычажного механизма размещена внутри опоры, а кинематическая связь выполнена в виде ползуна, состоящего из двух концентрично охватывающих друг друга втулок, внешняя из которых вращающаяся. Ползун установлен на внешней поверхности выступающей из верхнего вала части неподвижной опоры и через сквозные пазы соединен с тягой, а к вращающейся втулке ползуна шарнирно закреплены качалки. Технический результат - размещение оборудования над соосными несущими винтами. 2 ил.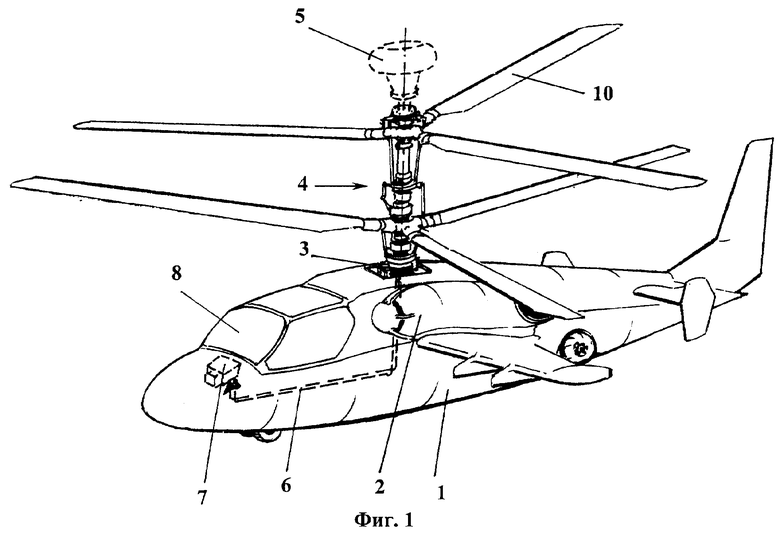
Вертолет, содержащий фюзеляж, силовую установку с трансмиссией и редуктором, на валах которого смонтирована система управления, в которой дифференциальное управление шагом лопастей выполнено в виде рычажного механизма с расположенной внутри вала верхнего несущего винта подвижной в осевом направлении невращающейся тягой, кинематически связанной с качалками, установленными над верхним несущим винтом и соединенными с подводками лопастей, отличающийся тем, что он снабжен полой неподвижной опорой, расположенной внутри вала верхнего несущего винта, которая нижним концом жестко закреплена к корпусу редуктора, а на верхнем конце опоры выполнены сквозные диаметрально расположенные пазы и узлы для установки оборудования, причем тяга рычажного механизма размещена внутри опоры, а кинематическая связь выполнена в виде ползуна, состоящего из двух концентрично охватывающих друг друга втулок, внешняя из которых вращающаяся, при этом ползун установлен на внешней поверхности выступающей из верхнего вала части неподвижной опоры и через сквозные пазы соединен с тягой, а к вращающейся втулке ползуна шарнирно закреплены качалки.
| SU 1826422 A1, 27.04.1996.SU 1504937 A1, 20.07.1997.GB 2280412 A, 01.02.1995. |

