Изобретение относится к авиационной технике и может быть применено при создании новых конструкций вертолетов с соосными несущими винтами.
Известно множество типов вертолетов с соосными несущими винтами, но наиболее широко известными и надежно показавшими в эксплуатации являются вертолеты Открытого Акционерного Общества "Камов" (см. журнал "Вертолет" №3 (18) за 2002 год, ЗАО "Периодика", г.Казань).
Опыт эксплуатации вертолетов с соосными несущими винтами показывает, что в техническом обслуживании наиболее трудоемкими являются работы, связанные:
- с обслуживанием системы управления несущими винтами;
- с подготовкой вертолета к его транспортировке наземным или воздушным транспортом и последующей подготовкой вертолета к полетам.
В первом случае повышенная эксплуатационная трудоемкость обусловлена размещением отдельных механизмов и тяг управления соосными несущими винтами как в зоне, экранированной нижним корпусом редуктора, так и расположением отдельных элементов управления внутри полости вала верхнего несущего винта (см. патент SU №1826422 А1 от 27.11.89 г. кл. В 64 С 27/54).
Во втором случае из-за больших размеров вертолета по высоте трудоемкость подготовки вертолета к транспортировке возрастает в связи с необходимостью демонтажа не только лопастей несущих винтов, но и редуктора со смонтированными на его валах агрегатами управления несущими винтами с предварительным демонтажем отдельных элементов каркаса и капотов отсека трансмиссии. А также работ, связанных с последующей сборкой и регулировкой системы управления при подготовке вертолета к эксплуатации.
Наиболее близким аналогом, в решении которого предпринята попытка частичного устранения этих проблем, является система двух соосных несущих винтов летательного аппарата, описанная в патенте RU №2155702 С1, кл. В 64 С 27/10, 27/32 от 15.04.1999 г.
В этом техническом решении вал верхнего несущего винта выполнен с возможностью осевого перемещения относительно опор редуктора, а управление несущими винтами выполнено таким образом, что в пространстве между ними отсутствуют какие-либо элементы конструкции. Автомат перекоса верхнего несущего винта размещен под нижним корпусом редуктора и связан тягами с быстроразъемными соединениями с нижней качалкой, которая в свою очередь соединена тягами с верхней качалкой управления лопастями верхнего несущего винта, а сами тяги, соединяющие обе качалки, расположены внутри полости вала верхнего несущего винта.
Уменьшение габаритов вертолета по высоте осуществляется за счет осевого перемещения вниз вала верхнего несущего винта с предварительным отсоединением тяг, связывающих автомат перекоса верхнего несущего винта с нижней качалкой.
Недостатком описанного выше решения является не только отсутствие заметного снижения трудоемкости эксплуатационного обслуживания вертолета за счет переноса автомата перекоса в практически недоступную для оперативного контроля зону осмотра, но также приводит к другим негативным факторам, как усложнение конструкции системы управления несущими винтами и самого редуктора, увеличения их размеров и веса.
Технической задачей настоящего изобретения является снижение трудозатрат по обслуживанию вертолета с соосными несущими винтами как в процессе плановой его эксплуатации, так и при работах по уменьшению габаритов вертолета по высоте для обеспечения транспортировки, в частности, воздушным транспортом. Последнее наиболее актуально для легких вертолетов.
Решение технической задачи обеспечивается тем, что вертолет, содержащий фюзеляж, включающий кабину экипажа с органами управления, редуктор с двумя соосными валами противоположного вращения, на каждом из которых смонтированы втулки несущих винтов, два автомата перекоса и кинематически связанные с ними две рычажные качалки управления углом установки лопастей, цепи управления, каждым из несущих винтов, включающие блок силовых цилиндров и суммирующий рычажный механизм, который оснащен двумя соосно расположенными и взаимно подвижными в осевом направлении стаканами, причем один из стаканов установлен на цилиндрической части верхнего корпуса редуктора, а второй стакан установлен концентрично первому, на поверхности второго стакана смонтирован автомат перекоса нижнего несущего вина, а кинематически связанная с ним рычажная качалка закреплена на верхней выступающей поверхности первого стакана, кроме того, каждый из стаканов шарнирно соединен посредством рычагов суммирующего механизма между собой и блоком силовых цилиндров, который жестко установлен на корпусе редуктора, при этом внутренний вал редуктора выполнен съемным в сборе с установленными на нем втулкой верхнего несущего винта, рычажной качалкой, верхним автоматом перекоса и тягами, обеспечивающими их взаимную кинематическую связь.
Предлагаемое изобретение поясняется чертежами, где:
на фиг.1 показан вертолет с соосными несущими винтами в комплектации основных агрегатов и систем, поясняющих суть изобретения;
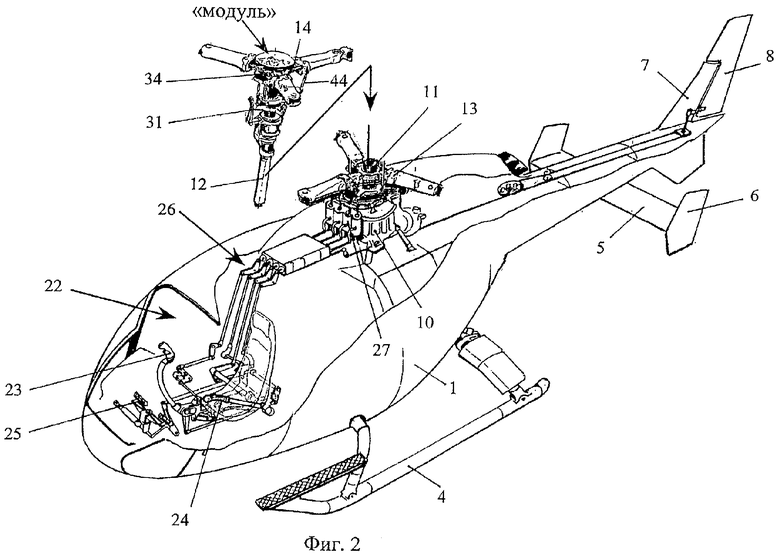
на фиг.2 - вертолет, подготовленный к транспортировке, со съемным "модулем" верхнего несущего винта;
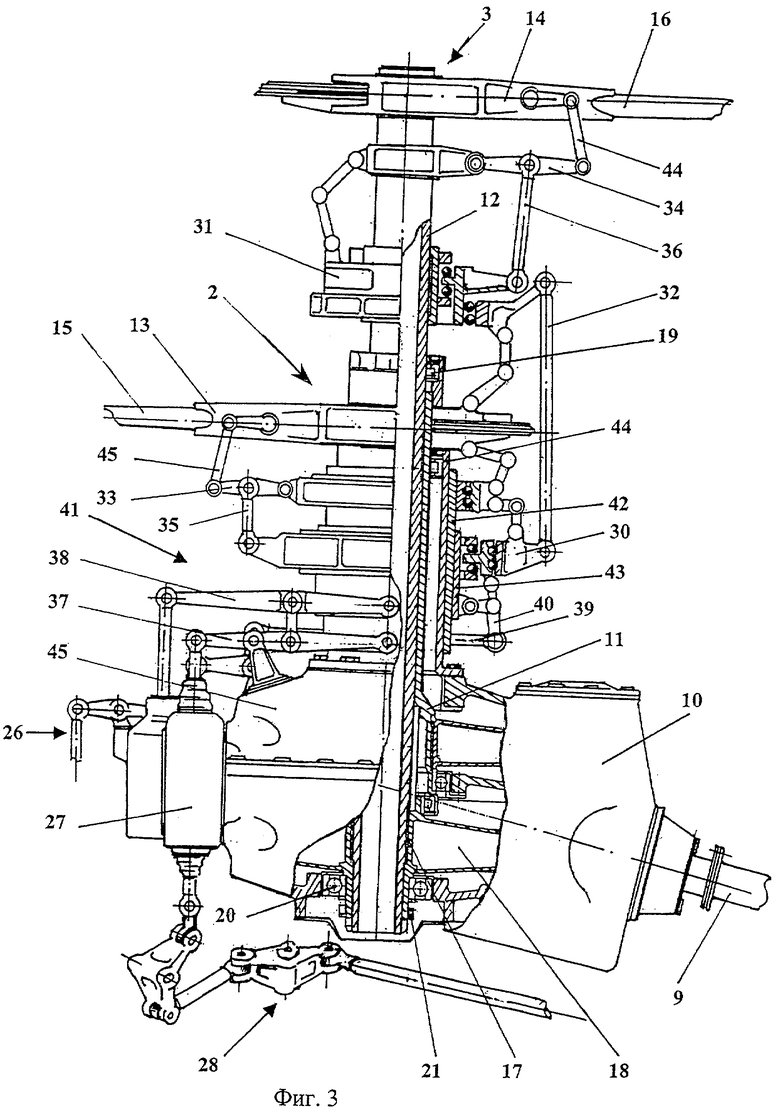
на фиг.3 - конструктивное решение системы управления соосными несущими винтами, обеспечивающее эксплуатацию ее по техническому состоянию и фрагмент редуктора с узлом, обеспечивающим демонтаж "модуля".
Вертолет содержит фюзеляж 1, два соосных несущих винта 2 и 3 противоположного вращения, шасси 4, развитое хвостовое оперение, включающее стабилизатор 5 с неподвижно установленными на нем килями 6, центральный киль 7 с рулем направления 8.
Передача мощности на несущие винты 2 и 3 от двигателя (не показан) осуществляется трансмиссионным валом 9 через редуктор 10, на валах 11 и 12 которого установлены втулки 13 и 14 с закрепленными на них лопастями 15 и 16.
Вал 12 выполнен съемным и установлен с подвижной посадкой и шлицевым соединением 17 со ступицей 18 ведущей шестерни редуктора 10. Опорами вала 12 служат подшипники 19 и 20. От осевого перемещения вниз вал 12 фиксируется торцевым упором в шлицевом соединении 17, а от перемещения вверх - затяжной гайкой 21 на нижнем свободном конце вала 12. Здесь же на валах 11, 12 редуктора 10 смонтирована система управления несущими винтами 2 и 3.
Управление вертолетом осуществляется из кабины экипажа 22 соответственно рычагами: продольно-поперечного управления 23, общего шага 24 и педалей 25 путевого управления.
Управление от рычагов 23, 24 и педалей 25 по кинематической цепи 26 передается на соответствующий канал блока 27 силовых цилиндров, а по кинематической цепи 28 - на управление рулем направления 8. Сам же блок 27 жестко закреплен на корпусе редуктора 10.
В кинематической цепи 26 предусмотрен блок 29 с электрораздвижными тягами в случае установки в систему управления вертолетом автопилота.
Система управления несущими винтами 2 и 3 содержит два автомата перекоса 30 и 31, кинематически соединенных между собой тягами 32 с быстроразъемными фиксаторами (не показан) две рычажные качалки 33 и 34, каждая из которых кинематически соединена тягами 35 и соответственно 36 с соответствующими автоматами перекоса, и систему рычагов 37, 38, тяг 39 и качалок 40, объединенных в суммирующий рычажный механизм 41.
Суммирующий рычажный механизм 41 снабжен двумя соосно расположенными и взаимоподвижными в осевом направлении стаканами 42 и 43, причем стакан 42 установлен на цилиндрической части 44 верхнего корпуса 45 редуктора 10, а стакан 43 установлен концентрично стакану 42. Автомат перекоса 30 смонтирован на поверхности стакана 43, а кинематически связанная с автоматом перекоса 30 рычажная качалка 33 закреплена на верхней выступающей поверхности стакана 42.
Каждый из стаканов 42, 43 шарнирно соединен посредством соответствующих рычагов 37, 38 друг с другом и с соответствующими штоками блока 27 силовых цилиндров.
Рычажная качалка 34 жестко закреплена на валу 12 и поводком 44 соединена с втулкой 14 верхнего несущего винта 3, а рычажная качалка 33 посредством поводка 45 соединена с втулкой 13 нижнего несущего винта 2.
Управление вертолетом осуществляется следующим образом.
Перемещение рычага 23 продольно-поперечного управления из кабины экипажа 22 через соответствующий канал кинематической цепи 26 передается на ответный этому каналу шток блока 27 силовых цилиндров и далее тягой 39 через качалку 40 на автомат перекоса 30, который тягами 32 соединен с автоматом перекоса 31, обеспечивая этим одинаковые угловые перемещения обоих автоматов перекоса и соответственно через рычажные качалки 33 и 34 - одинаковое изменение углов установки лопастей по азимуту на нижнем 2 и верхнем 3 несущих винтах.
Управление общим шагом лопастей несущих винтов осуществляется перемещением рычага 24 в кабине экипажа 22, которое через соответствующий канал кинематической цепи 26 передается на ответный шток блока 27 силовых цилиндров и далее на рычаг 38 суммирующего рычажного механизма 41, который перемещает автомат перекоса 30 и соответственно автомат перекоса 31 одновременно на одинаковую величину и через качалки 33 и 34, имеющие одинаковое передаточное отношение, приводит к одновременному и одинаковому увеличению или уменьшению углов установки лопастей 15, 16 верхнего и нижнего несущих винтов 2, 3.
Перемещением педалей 25 в кабине экипажа 22 через соответствующий канал кинематической цепи 26 и ответный шток блока 27 силовых цилиндров перемещение передается на рычаг 37 и соответственно на установленный на нем рычаг 38 суммирующего рычажного механизма 41, обеспечивая этим дифференциальное управление несущими винтами, т.е. увеличение углов установки лопастей одного из несущих винтов при одновременном уменьшении на ту же величину угла установки лопастей другого несущего винта.
Рычаги 37 и 38 перемещают автомат перекоса и рычажную качалку 33 вдоль оси вала редуктора в одну сторону, но на разные величины ходов.
Подбором плеч рычагов 37 и 38 достигается опережающее перемещение рычажной качалки 33 и за счет этого обеспечивается одновременное и одинаковое по величине, но разное по направлению перемещение поводков 44 и 45 и, соответственно, происходит одинаковое изменение по величине взаимопротивоположных углов установки лопастей на нижнем и верхнем несущих винтах.
Предлагаемое выполнение конструкции системы управления соосными несущими винтами исключает необходимость проводки управления внутри полости вала 12 верхнего несущего винта и в зоне нижнего корпуса редуктора 10, что обеспечивает снижение трудозатрат эксплуатационного обслуживания системы управления соосными несущими винтами без усложнения ее конструкции, переводя плановые эксплуатационные работы в разряд обслуживания по техническому состоянию.
В случае необходимости транспортировки вертолета и уменьшения с этой целью его габаритов по высоте в конструкции редуктора 10 предусмотрена возможность оперативного демонтажа с вертолета вала 12 в сборе с установленными на нем втулкой 14 верхнего несущего винта 3, рычажной качалкой 34, автоматом перекоса 31 с соответствующими тягами 36 и поводками 44, обеспечивающими кинематическую связь вышеуказанных агрегатов.
Подготовка вертолета к транспортировке происходит следующим образом.
Отсоединяются тяги между автоматами перекоса 30 и 31, рассоединяется шлиц-шарнир кинематической связи внешнего кольца автомата перекоса 31 с втулкой нижнего несущего винта 13 (не показан), и система управления несущими винтами готова к демонтажу вала 12. Следующим шагом освобождается гайка 21, фиксирующая вал 12 от осевого перемещения вверх, и специальным приспособлением вал 12 отжимается с посадочных мест в подшипниках 19 и 20 и шлицевого соединения 17, и затем так называемый "модуль" верхнего несущего винта - вал 12 со смонтированными на нем агрегатами втулки 14, автоматом перекоса 31 и рычажной качалкой 34 демонтируется с вертолета.
Монтаж "модуля" и приведение системы управления несущими винтами в рабочее положение осуществляется в обратной последовательности.
Уменьшение габаритов соосного вертолета по высоте по предлагаемому изобретению позволяет снизить время подготовки вертолета к транспортировке и последующему восстановлению его к полетам без усложнения конструкции и существующей технологии изготовления редуктора и агрегатов системы управления в производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| ВЕРТОЛЕТ | 2004 |
|
RU2263607C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2005 |
|
RU2307766C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
Изобретение относится к авиационной технике и может быть применено при создании новых конструкций вертолетов с соосными несущими винтами. Последнее наиболее актуально для легких вертолетов. Вертолет содержит фюзеляж, включающий кабину экипажа с органами управления, редуктор с двумя соосными валами противоположного вращения, на каждом из которых смонтированы втулки несущих винтов, два автомата перекоса и кинематически связанные с ними две рычажные качалки управления углом установки лопастей, цепи управления каждым из несущих винтов, включающие блок силовых цилиндров и суммирующий рычажный механизм, который оснащен двумя соосно расположенными и взаимоподвижными в осевом направлении стаканами. Один из стаканов установлен на цилиндрической части верхнего корпуса редуктора, а второй стакан установлен концентрично первому. На поверхности второго стакана смонтирован автомат перекоса нижнего несущего винта, а кинематически связанная с ним рычажная качалка закреплена на верхней выступающей поверхности первого стакана. Каждый из стаканов шарнирно соединен посредством рычагов суммирующего механизма между собой и блоком силовых цилиндров, который жестко установлен на корпусе редуктора. Внутренний вал редуктора выполнен съемным в сборе с установленными на нем втулкой верхнего несущего винта, рычажной качалкой, верхним автоматом перекоса и тягами, обеспечивающими их взаимную кинематическую связь. Технический результат - снижение трудозатрат по обслуживанию вертолета с соосными несущими винтами как в процессе плановой его эксплуатации, так и при работах по уменьшению габаритов вертолета по высоте для обеспечения транспортировки. 3 ил.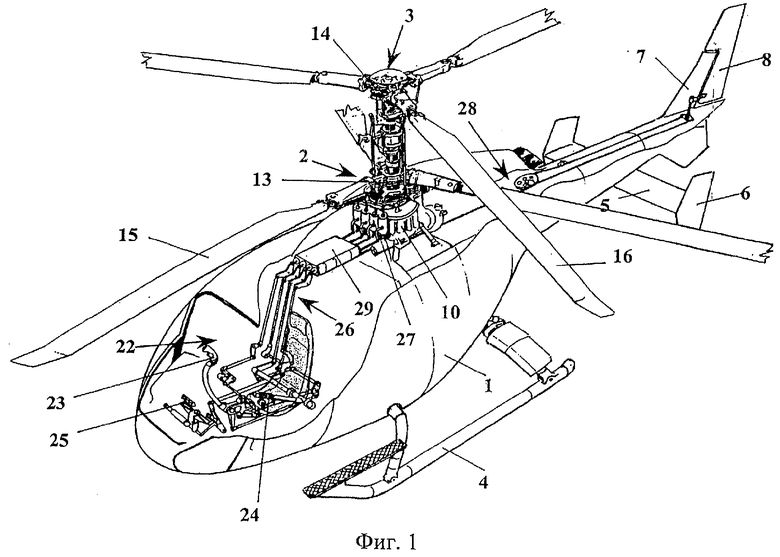
Вертолет с соосными несущими винтами, содержащий фюзеляж, включающий кабину экипажа с органами управления, редуктор с двумя соосными валами противоположного вращения, на каждом из которых смонтированы втулки несущих винтов, два автомата перекоса и кинематически связанные с ними две рычажные качалки управления углом установки лопастей, цепи управления каждым из несущих винтов, включающие блок силовых цилиндров и суммирующий рычажный механизм, отличающийся тем, что суммирующий рычажный механизм оснащен двумя соосно расположенными и взаимоподвижными в осевом направлении стаканами, причем один из стаканов установлен на цилиндрической части верхнего корпуса редуктора, а второй стакан установлен концентрично первому, на поверхности второго стакана смонтирован автомат перекоса нижнего несущего винта, а кинематически связанная с ним рычажная качалка закреплена на верхней выступающей поверхности первого стакана, кроме того, каждый из стаканов шарнирно соединен посредством рычагов суммирующего механизма между собой и блоком силовых цилиндров, который жестко установлен на корпусе редуктора, при этом внутренний вал редуктора выполнен съемным в сборе с установленными на нем втулкой верхнего несущего винта, рычажной качалкой, верхним автоматом перекоса и тягами, обеспечивающими их взаимную кинематическую связь.
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |

