Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля для определения местоположения наземных источников радиоизлучения коротковолнового и ультракоротковолнового диапазона, в частности, в условиях города.
Известные способы определения местоположения радиопередатчика мобильной станцией радиоконтроля включают прием радиоизлучения радиопередатчика, периодическое измерение линии положения радиопередатчика и собственных координат мобильной станции радиоконтроля, накопление результатов измерений за время движения и их функциональное преобразование в координаты радиопередатчика.
Известен способ определения местоположения источника излучения маневрирующим пеленгатором, в котором на участке равномерного движения измеряют скорость, курсовой угол пеленгатора и, в трех точках пространства, пеленги на источник излучения, а его положение относительно пеленгатора рассчитывают, решая уравнения взаимосвязи результатов измерений и координат источника излучения [1. Шаров С.Н. Оценка точности измерения параметров движения источника излучения маневрирующим пеленгатором. Информационно-управляющие системы, 2005, №2, с.39-46].
Область применения данного способа ограничена условием равномерного движения пеленгатора и нерасположения источника излучения на линии движения, когда линии пеленгов не пересекаются. К недостаткам способа следует отнести также низкую точность, обусловленную, во-первых, погрешностями измерений собственных координат пеленгатора через измерения скорости и курсового угла, во-вторых, низкой помехозащищенностью функционального преобразования на основе решения уравнений взаимосвязи измеряемых параметров и координат источника излучения.
Известен способ определения местоположения источника радиоизлучения, включающий прием радиосигнала в N≥3 пространственно разнесенных пунктах приема с известными координатами Хn, Yn, измерение эффективного значения напряжения принятых радиосигналов  с последующей передачей на центральный пункт, преобразование результатов измерений на центральном пункте с учетом расстояния
с последующей передачей на центральный пункт, преобразование результатов измерений на центральном пункте с учетом расстояния  от точки пространства с координатами (х, у) до n-й точки приема в функцию пространственной неопределенности
от точки пространства с координатами (х, у) до n-й точки приема в функцию пространственной неопределенности  , по положению максимума которой определяют местоположение источника радиоизлучения, при этом прием радиосигнала выполняют с помощью антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли [2. Патент РФ №2263928, G01S 5/00, 2005].
, по положению максимума которой определяют местоположение источника радиоизлучения, при этом прием радиосигнала выполняют с помощью антенн, всенаправленных в горизонтальной плоскости с одинаковыми высотами поднятия над поверхностью Земли [2. Патент РФ №2263928, G01S 5/00, 2005].
В данном способе учитывают обратную квадратичную зависимость напряженности поля источника от расстояния до него, линии положения источника представляют собой окружности с центрами на линии движения. При соответствующей модернизации, связанной с определением собственных координат, накоплением результатов измерений и их интерпретацией, как результатов многопозиционных измерений, способ может быть использован для определения местоположения радиопередатчика мобильной станцией радиоконтроля. Недостатками способа являются: неоднозначность определения координат при движении по прямой линии (слева-справа относительно этой линии), а также низкая точность определения координат источника радиоизлучения в городских условиях, когда значительны флуктуации напряженности электромагнитного поля.
Наиболее близким к предлагаемому способу по технической сущности является способ определения местоположения радиопередатчика мобильной станцией радиоконтроля, включающий периодическое измерение курсового угла и собственных координат мобильной станции радиоконтроля, синхронно с этим прием радиоизлучения радиопередатчика и измерение пеленга на него с учетом курсового угла, расчет пеленга относительно места нахождения мобильной станции радиоконтроля на каждую точку пространства, задаваемую с шагом квантования возможных значений координат радиопередатчика, определение и накопление по совокупности всех периодов измерения для каждой точки пространства разности измеренных и расчетных значений пеленга, после не менее двух периодов измерений оценивание дисперсии разностей измеренных и расчетных значений пеленга для каждой точки пространства [3. Ашихмин А.В., Жуков А.А., Козьмин В.А., Шадрин И.А. Локализация источников радиоизлучений и измерение напряженности поля с помощью мобильной станции радиоконтроля. Спецтехника, 2003. Специальный выпуск, с.14].
В данном способе линейную зависимость фазы электромагнитного поля от расстояния используют для измерения пеленга. Линия положения радиопередатчика представляет собой луч в декартовой системе координат.
Ближайшему аналогу присущи следующие недостатки. Первый - область применения способа ограничена условием нерасположения радиопередатчика на линии и вблизи линии движения мобильной станции радиоконтроля, когда линии пеленгов на радиопередатчик не пересекаются или пересекаются под очень острым углом, соответственно возникают аномально большие ошибки определения местоположения радиопередатчика. Такое ограничение особенно существенно на начальном этапе работы при выборе дальнейшего маршрута движения мобильной станции радиоконтроля. Второй - низкая точность определения местоположения радиопередатчика в городских условиях, когда значительны погрешности пеленгования вследствие переизлучений от окружающих предметов, прежде всего зданий. Третий недостаток обусловлен определением только дисперсии разностей измеренных и расчетных значений пеленга как среднего арифметического квадратов их значений, что справедливо только при центрированном (с нулевым средним значением) распределении случайных величин. Так как пеленг величина циклическая, определен в границах интервала (±π), условие центрированности зачастую не выполняется, что ограничивает область применения способа, по крайней мере, зоной пространства, не содержащей пеленгов, вблизи указанных границ [4. Глазнев А.А, Козьмин В.А., Литвинов Г.В., Шадрин И.А. Многостанционные системы радиоконтроля и определения местоположения источников радиоизлучения. Спецтехника, 2002. Специальный выпуск, с.26].
Задачей данного изобретения является расширение функциональных возможностей, обеспечение области применимости способа на зоны пространства вблизи линии движения мобильной станции и вблизи границ интервала определения пеленга.
Технический результат, который может быть получен при осуществлении изобретения, - повышение помехозащищенности и точности определения местоположения радиопередатчика, увеличение рабочей зоны.
Поставленная задача и технический результат достигаются за счет того, что в известном способе определения местоположения радиопередатчика мобильной станцией радиоконтроля, включающем периодическое измерение курсового угла и собственных координат мобильной станции радиоконтроля, синхронно с этим прием радиоизлучения радиопередатчика, измерение пеленга на него по зависимости фазы принятого радиоизлучения от расстояния, как угла между опорным направлением и направлением на радиопередатчик с учетом курсового угла и с привязкой к опорному направлению, расчет пеленга относительно места нахождения мобильной станции радиоконтроля на каждую точку пространства, задаваемую с шагом квантования возможных значений координат радиопередатчика, определение и накопление по совокупности всех периодов измерения для каждой точки пространства разности измеренных и расчетных значений пеленга, после не менее двух периодов измерений определение дисперсии разностей измеренных и расчетных значений пеленга для каждой точки пространства, согласно изобретению одновременно с измерениями пеленга на радиопередатчик дополнительно измеряют амплитуду принятого радиоизлучения радиопередатчика, которую нормируют на квадрат расстояния от каждой точки пространства до места нахождения мобильной станции радиоконтроля и накапливают по совокупности всех периодов измерений, после не менее двух периодов измерений определяют дисперсию нормированных значений амплитуды для каждой точки пространства, которую умножают на дисперсию разности измеренных и расчетных значений пеленга, получая произведение дисперсий, а местоположение радиопередатчика определяют как положение минимума этого произведения дисперсий по совокупности всех точек пространства.
Возможен дополнительный вариант осуществления способа, в котором целесообразно, чтобы прием радиоизлучения радиопередатчика выполняли с помощью антенн, образующих кольцевую антенную решетку, и многоканального приемного устройства, амплитуду принятого радиоизлучения и пеленг на радиопередатчик измеряют путем преобразования радиосигналов с выходов многоканального приемного устройства в угловой спектр и определения соответственно значения и положения его максимума, а дисперсию разностей измеренных и расчетных значений пеленга определяют как учетверенное среднее арифметическое значение квадрата синуса их половинных значений.
Предложенный способ отличается от известного наличием новых действий над радиосигналами, условиями и порядком их выполнения, а именно:
- одновременно с измерением пеленга на радиопередатчик дополнительно измеряют амплитуду принятого радиоизлучения, которую нормируют на квадрат расстояния от каждой точки пространства до места нахождения мобильной станции радиоконтроля и накапливают по совокупности всех периодов измерения;
- после не менее двух периодов измерений оценивают дисперсию нормированных значений амплитуды для каждой точки пространства;
- умножают дисперсию нормированных значений амплитуды на дисперсию разности измеренных и расчетных значений пеленга,
- местоположение радиопередатчика определяют как положение минимума произведения дисперсий.
Кроме того, прием радиоизлучения радиопередатчика выполняют с помощью специальных средств: антенн, образующих кольцевую антенную решетку, и многоканального приемного устройства;
- амплитуду принятого радиоизлучения и пеленг на радиопередатчик измеряют совместно путем преобразования радиосигналов с выходов многоканального приемного устройства в угловой спектр и определения соответственно значения и положения его максимума;
- дисперсию разностей измеренных и расчетных значений пеленга определяют с учетом циклического характера этих величин как учетверенное среднее арифметическое значение квадрата синуса их половинных значений.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от ближайшего аналога, не выявлена.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые чертежи.
Фиг.1 изображает структурную схему мобильной станции радиоконтроля для реализации заявленного способа;
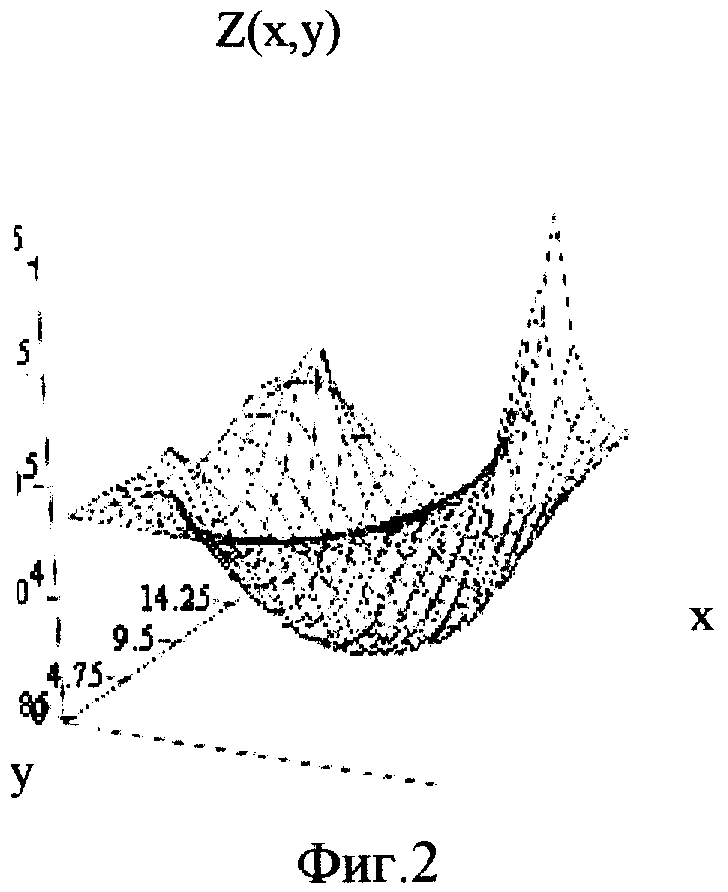
Фиг.2 - пример функции пространственной неопределенности;
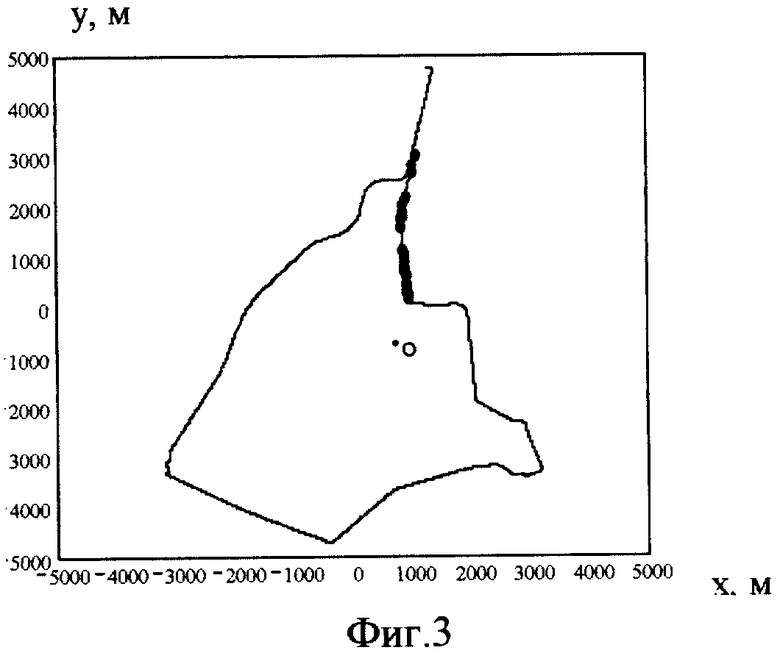
Фиг.3 - результаты контрольного определения координат радиопередатчика в городе. Крупными точками на фиг.3 показаны места расположения мобильной станции радиоконтроля, кружком - истинное местоположение радиопередатчика, точкой - оценка местоположения радиопередатчика, тонкой линией - общий маршрут движения мобильной станции радиоконтроля.
Идея решения поставленной технической задачи состоит в учете совокупности параметров электромагнитного поля, различным образом зависящих от расстояния до радиопередатчика: линейной зависимости фазы и обратной квадратичной зависимости амплитуды. При этом раздельное определение местоположения радиопередатчика известными [2, 3] способами, учитывающими каждый только одну из указанных закономерностей, и объединение результатов, например, путем усреднения оценок, не устраняет имеющегося технического противоречия. Более того, возникают дополнительные трудности, связанные с установкой весовых коэффициентов при усреднении оценок координат, получаемых различными способами. Эти коэффициенты сложным образом зависят от положения радиопередатчика, погрешностей измерений параметров радиосигналов.
В предлагаемом способе, как и в ближайшем аналоге [3], линейная зависимость фазы используется для измерения пеленга на радиопередатчик (путем преобразования радиосигналов с выходов многоканального приемного устройства в угловой спектр и определения положения его максимума). Но не только. Эта же закономерность используется для одновременного измерения амплитуды принятого радиоизлучения (значение максимума углового спектра). Таким образом, операция "измерение амплитуды принятого радиоизлучения" выполняется в заявленном способе в направлении на радиопередатчик. Эта операция существенно отличается от аналогичной, реализуемой, например, в способе [2], в котором производят "измерение эффективного значения напряжения принятых радиосигналов". Принят и иной вариант нормировки измеренных значений на квадрат расстояния: путем умножения, а не деления, как в [2]. Операция "измерение эффективного значения напряжения принятых радиосигналов" принципиально осуществляется в ближайшем аналоге с применением всенаправленного приема. Предлагаемое же в заявленном способе использование направленного приема при измерении амплитуды принятого радиоизлучения, например, с использованием кольцевой антенной решетки повышает помехозащищенность и точность измерений, особенно в условиях многолучевого распространения радиоволн.
Амплитуда принятого радиоизлучения обратно пропорциональна квадрату расстояния до радиопередатчика. Тогда нормировка (умножение) амплитуды на квадрат расстояния в отсутствии погрешностей измерений обеспечивает в точке истинных координат радиопередатчика постоянство нормированных значений амплитуды, измеренных в различных местах нахождения мобильной станции радиоконтроля. Следовательно, в точке пространства, соответствующей местоположению радиопередатчика, дисперсия нормированных значений амплитуды (постоянной величины) равна нулю, как и дисперсия разностей измеренных и расчетных значений пеленга. Соответственно и произведение дисперсий имеет минимум в точке истинных координат. Необходимость определения интегрального показателя эффективности в виде произведения дисперсий подтверждается и результатами статистического синтеза для модели неизвестных значений дисперсии, некоррелированных погрешностей измерений пеленгов и амплитуд. Отметим, что в способе-аналоге [2] определяется максимум "функции пространственной неопределенности", что противоречит результатам синтеза и не позволяет использовать результат максимизации в предлагаемом способе. При определении дисперсии разности истинного и измеренного значения пеленга цикличность пеленга учитывается тригонометрическим преобразованием (синус полуразности), что устраняет смещенность соответствующих оценок и снимает ограничение на применение способа вблизи границ интервала определения пеленга.
По причине различия физических факторов, обуславливающих недостатки известных способов, интегральный учет совокупности параметров электромагнитного поля, различным образом зависящих от расстояния, в соответствии с предложенными новыми действиями над радиосигналами, условиями и порядком их выполнения, позволяет расширить область применимости способа и повысить точность определения местоположения радиопередатчика.
Поскольку заявленный способ может быть реализован при использовании соответствующей мобильной станции, то далее описывается характерный состав функциональных элементов такой станции.
Мобильная станция радиоконтроля (фиг.1), реализующая предложенный спосо6, содержит пеленгатор 1, навигационную систему 2, запоминающее устройство 3, вычитатель 4, блок нормировки 5, блок преобразования координат 6, блок оценки дисперсии пеленга 7, блок оценки дисперсии амплитуды 8, умножитель 9 и блок определения минимума 10.
Первый выход пеленгатора 1, вычитатель 2 через первый вход, блок оценки дисперсии пеленга 7, умножитель 9 через первый вход и блок определения минимума 10 соединены последовательно. С входом пеленгатора 1 соединен первый выход навигационной системы 2, второй выход которой подключен к первому входу блока преобразования координат 6, второй вход которого соединен с выходом запоминающего устройства 3. Второй выход пеленгатора 1 подключен к первому входу блока нормировки, второй вход которого соединен со вторым выходом блока преобразования координат 6, первый выход которого подключен ко второму входу вычитателя 4. Выход блока нормировки 5 соединен с входом блока оценки дисперсии амплитуды 8, выход которого подключен ко второму входу умножителя 9. Выходом мобильной станции радиоконтроля является выход блока определения минимума 10.
Указанные элементы содержатся, например, в составе мобильной станции радиоконтроля "Аргумент" [3. с.9-11]: пеленгатор 1 и навигационная система 2 - непосредственно, а другие элементы могут быть введены в составе вычислительной системы станции. Прием радиоизлучения радиопередатчика выполняют с помощью девяти антенн пеленгатора 1, образующих кольцевую эквидистантную антенную решетку, и многоканального приемного устройства. Амплитуду принятого радиоизлучения и пеленг на радиопередатчик измеряют путем преобразования радиосигналов с выходов многоканального приемного устройства в угловой спектр и определения соответственно значения и положения его максимума. При приеме радиоизлучения с направления на радиопередатчик в результате фазирования радиосигналов антенн и последующего суммирования при преобразовании в угловой спектр амплитуда принятого радиоизлучения относительно одиночного приема увеличивается пропорционально числу антенн, ослабляясь в других направлениях приема в зависимости от углового расстояния, соотношения длины волны и радиуса антенной решетки, что повышает помехозащищенность и точность измерений.
С первого выхода пеленгатора 1 поступают измеренные значения пеленга, а со второго - амплитуды принятого радиоизлучения. Пеленг, как угол между опорным направлением и направлением на радиопередатчик, измеряют с учетом курсового угла, с привязкой к опорному направлению (например, на Север). Отсчет пеленга осуществляют от оси ординат (у) декартовой системы координат по часовой стрелке. Значения пеленга определяют с учетом курсового угла мобильной станции радиоконтроля, поступающего с первого выхода навигационной системы 2, по ее второму выходу снимают значения собственных координат мобильной станции радиоконтроля. Измерения в пеленгаторе 1 и навигационной системе 2 выполняют синхронно, период измерений определяется быстродействием данных блоков. Перед началом работы в запоминающее устройство 3 заносят координаты точек пространства в пределах возможной зоны нахождения радиопередатчика. Координаты точек пространства определяют аналогично принятому в [2], то есть путем квантования возможных значений координат радиопередатчика, с шагом, определяемым допустимой погрешностью определения местоположения. С учетом крутизны последующих преобразований (см. фиг.2) максимальное значение шага квантования практически не должно превышать величины 0,5 км. В типовых условиях применения мобильной станции радиоконтроля общее число точек пространства в зоне 10×10 км и допустимой погрешности 100 м составляет порядка 104.
Принцип последующего функционирования мобильной станции радиоконтроля, в которой реализуется предложенный способ, состоит в следующем.
В процессе движения с помощью навигационной системы 2 периодически измеряют курсовой угол и собственные координаты мобильной станции радиоконтроля (Хn, Yn), где n=1, 2, ..., N - номер периода измерений, N - общее число периодов измерений. Одновременно радиоизлучение радиопередатчика принимают с помощью антенн и приемных устройств пеленгатора 1, измеряют пеленг на источник  и амплитуду принятого радиоизлучения
и амплитуду принятого радиоизлучения  . Для однозначного определения местоположения радиопередатчика на плоскости количество измерений должно быть не менее двух в точках с различными собственными координатами мобильной станции радиоконтроля.
. Для однозначного определения местоположения радиопередатчика на плоскости количество измерений должно быть не менее двух в точках с различными собственными координатами мобильной станции радиоконтроля.
Амплитуду принятого радиоизлучения и пеленг на радиопередатчик измеряют совместно путем преобразования радиосигналов с выходов многоканального приемного устройства в угловой спектр и определения соответственно значения и положения его максимума. Угловой спектр характеризует распределение уровня радиоизлучения радиопередатчика в точке приема по возможным направлениям на радиопередатчик. Преобразование радиосигналов с выходов многоканального приемного устройства в угловой спектр осуществляют путем компенсирующего изменения их фаз на величину набегов фаз от каждого возможного местоположения радиопередатчика (точки пространства с координатами (х, у)) до соответствующей антенны, последующего когерентного суммирования и определения амплитуды суммарного радиосигнала. По совокупности измеренных значений амплитуды суммарного радиосигнала определяют максимальное значение (измеренная амплитуда принятого радиоизлучения) и направление на соответствующую точку пространства (измеренный пеленг на радиопередатчик),
Измерения сопровождаются погрешностями. При проведении замеров через расстояние, превышающее половину длины волны излучения радиопередатчика, измеренные значения амплитуды являются случайными независимыми величинами, а их среднее значение обратно пропорционально квадрату расстояния  от радиопередатчика до мобильной станции радиоконтроля
от радиопередатчика до мобильной станции радиоконтроля

где х0, у0 - истинные координаты радиопередатчика.
Параметр μ определяется совокупностью в том числе случайных факторов: мощностью радиопередатчика, углом наклона, действующей высотой и высотой поднятия его антенны, высотой, на которой производится прием радиоизлучения от радиопередатчика, длиной волны излучения радиопередатчика, параметрами подстилающей поверхности и затенений на трассе распространения радиоволн. Дисперсия измеренных значений амплитуды зависит от дисперсии  этого случайного параметра
этого случайного параметра

Измеренные значения пеленга также случайны, плотность вероятности их распределения можно аппроксимировать циклическим аналогом нормального закона распределения

где π=3,14..., θ0n - истинное значение пеленга на радиопередатчик из n-й точки расположения мобильной станции радиоконтроля,  - дисперсия измерений пеленга.
- дисперсия измерений пеленга.
При неизвестных среднем значении и дисперсии параметра μ, а также дисперсии измеренных пеленгов статистически оптимальная обработка совокупности независимых результатов измерений включает операции оценки неизвестной дисперсии соответствующих измерений, получение функции пространственной неопределенности в виде произведения этих оценок с последующим определением положения ее минимума. Указанные операции реализуются следующим образом.
Результаты измерения собственных координат мобильной станции радиоконтроля со второго выхода навигационной системы 2 поступают на первый вход блока преобразования координат 6. В блоке 6 рассчитывают пеленг θn из места нахождения станции (Хn, Yn) на каждую точку пространства с координатами (х, у), поступающими с выхода запоминающего устройства 3, и квадрат расстояния от мобильной станции радиоконтроля до точки пространства


В вычитателе 4 по результатам каждого измерения пеленга для каждой точки пространства определяют разности измеренного и расчетных значений пеленга

Одновременно в блоке нормировки 5 измеренную амплитуду принятого радиоизлучения нормируют на квадрат расстояния от каждой точки пространства до места нахождения мобильной станции радиоконтроля

Полученные (6), (7) результаты поступают на блоки оценки дисперсии пеленга 7 и амплитуды 8 соответственно, где их накапливают.
В блоке 7 оценки дисперсии пеленга для каждой точки пространства определяют квадрат синуса половинных значений измеренного и расчетных значений пеленга, результаты преобразования накапливают рекуррентным методом

где S1N-1(х, у), S1N(х, у) - соответственно результаты накопления разности измеренных и расчетных значений пеленга на предшествующем (N-1) и текущем (N) периоде измерения для точки пространства с координатами (х, у).
Аналогично в блоке 8 оценки дисперсии амплитуды накапливают нормированные значения амплитуды в первой степени и их квадраты


где S2N-1(х, у), S2N(х, у) и S3N-1(х, у), S3N(х, у) - соответственно результаты накопления нормированных значений амплитуды и их квадратов на предшествующем (N-1) и текущем (N) периоде измерения для точки пространства с координатами (х, у).
Операции (8)-(10) накопления выполняют при нулевых начальных условиях, то есть S10(х, у)=S20(х, у)=S30(х, у)=0. Для хранения результатов накопления в каждой из 104 точек пространства достаточен объем запоминающих устройств 3·104, что не вызывает затруднений при практической реализации на современной цифровой элементной базе.
После второго и последующих периодов измерений и завершения операций накопления для каждой точки пространства с координатами (х, у), в предположении, что радиопередатчик находится в этой точке пространства, по совокупности для этой точки пространства всех разностей измеренных и расчетных значений пеленга определяют дисперсию этих разностей

и дисперсию нормированных значений амплитуды

Формулы (11), (12) в математическом плане эквивалентны следующим:


Однако для получения оценок дисперсии (11), (12) рекуррентным методом не требуется хранить все предшествующие значения разности измеренных и расчетных значений пеленга  и нормированной амплитуды Un(х, у), достаточно добавить вновь поступившие результаты измерений к ранее накопленным значениям согласно формулам (8)-(10), что не требует увеличения вычислительного ресурса, прежде всего емкости запоминающих устройств, и упрощает техническую реализацию предлагаемого способа.
и нормированной амплитуды Un(х, у), достаточно добавить вновь поступившие результаты измерений к ранее накопленным значениям согласно формулам (8)-(10), что не требует увеличения вычислительного ресурса, прежде всего емкости запоминающих устройств, и упрощает техническую реализацию предлагаемого способа.
Таким образом, дисперсию разностей измеренных и расчетных значений пеленга определяют как учетверенное среднее арифметическое значение квадрата синуса их половинных значений (13), а дисперсию нормированных значений амплитуды как среднее арифметическое квадрата их центрированных значений (14) по совокупности соответственно всех разностей измеренных и расчетных значений пеленга и нормированных значений амплитуды в каждой точке пространства.
В умножителе 9 дисперсии (13), (14) для каждой точки пространства перемножают с получением функции пространственной неопределенности вида

Пример такой функции пространственной неопределенности приведен на фиг.2, ее минимум находится в окрестности истинных координат радиопередатчика. Для определения местоположения радиопередатчика на заключительной стадии в блоке 10 определяют положение минимума функции пространственной неопределенности (произведения оценки дисперсии нормированных значений амплитуды на оценку дисперсии разности измеренных и расчетных значений пеленга), то есть такую точку, в которой

При поступлении данных очередного измерения указанные операции циклически повторяют, таким образом, в процессе движения мобильной станции радиоконтроля непрерывно уточняют местоположение радиопередатчика.
Эффективность изобретения выражается в расширении области применимости способа и повышении точности определения местоположения источника радиоизлучения.
Количественная оценка выполнена на основе прямых измерений в условиях города при движении по маршруту, показанному на фиг.3 тонкой линией. Измерения выполнены с применением комплекта аппаратуры мобильной станции радиоконтроля "Аргумент". Контрольный радиопередатчик мощностью 5 ватт располагался в комнате на пятом этаже восьмиэтажного административного здания. Несущая частота излучения варьировалась в диапазоне 100-450 МГц. Измерения производились с периодичностью 0,1 с. В результате исследований установлено следующее. Применение предлагаемого способа обеспечивает определение местоположения радиопередатчика в областях пространства вблизи линии движения мобильной станции радиоконтроля и вблизи границ интервала определения пеленга. Приведенный на фиг.3 пример соответствует варианту начала движения, когда измерения (места измерений выделены крупными точками) выполнены при расположении мобильной станции радиоконтроля примерно на прямой линии, вне зоны применимости способа, реализованного в ближайшем аналоге. Тем не менее, измеренные значения координат предлагаемым способом достаточно близки к истинному положению радиопередатчика. Наибольший эффект от применения предлагаемого способа наблюдается на участках, когда мобильная станция радиоконтроля перемещается вблизи источника радиоизлучения и в районах со сложными условиями распространения радиоволн, например, на перекрестках улиц с контактными электросетями, когда устойчивое пеленгование затруднено. Интегральное, по совокупности точек всего маршрута, повышение точности определения координат составило величину около 20% относительно способа, реализованного в ближайшем аналоге, при увеличении на 35% площади зоны, в пределах которой линейная средняя квадратичная погрешность определения местоположения радиопередатчика не превышает 100 м. Наивысшие точности естественно достигаются при движении мобильной станции вокруг радиопередатчика примерно по окружности.
Наиболее успешно заявленный способ определения местоположения радиопередатчика мобильной станцией радиоконтроля промышленно применим для нахождения местоположения наземных источников радиоизлучения коротковолнового и ультракоротковолнового диапазона в городских условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИМПЛЕКСНОЙ РАДИОСЕТИ МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2008 |
|
RU2383031C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2014 |
|
RU2560098C1 |
| Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучения | 2016 |
|
RU2668566C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2319169C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
| ОДНОПОЗИЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2657237C1 |
Изобретение может быть использовано в системах радиоконтроля для определения местоположения наземных источников радиоизлучения коротковолнового и ультракоротковолнового диапазона. Местоположение радиопередатчика определяют как положение минимума, по совокупности всех точек пространства, произведения дисперсии нормированных значений амплитуды для каждой точки пространства и дисперсии разности измеренных и расчетных значений пеленга. Достигаемым техническим результатом является повышение помехозащищенности и точности определения местоположения радиопередатчика, а также увеличение рабочей зоны. 1 з.п. ф-лы, 3 ил.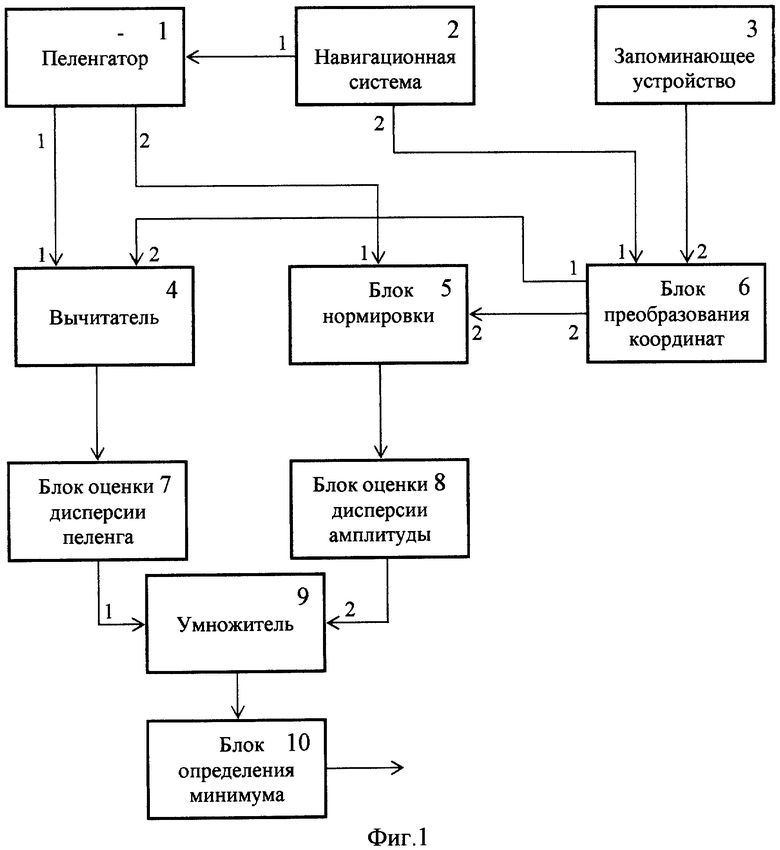
| АШИХМИН А.В | |||
| и др | |||
| Локализация источников радиоизлучений и измерение напряженности поля с помощью мобильной станции радиоконтроля | |||
| Спецтехника, 2003, специальный выпуск, с.14 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ РАДИОПЕРЕДАТЧИКОВ | 1995 |
|
RU2154836C2 |
| WO 2006024298 А1, 09.03.2006 | |||
| ТЯНУЩАЯ КЛЕТЬ'CCi.:u?i!v-J : ййтеит*)0--тг j^.L^«_J^«?'^^^- ^--^ | 0 |
|
SU235252A1 |
| US 2002033769 А1, 21.03.2002. | |||

