Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля для выявления корреспондентов симплексных радиосетей коротковолнового и ультракоротковолнового диапазона, в частности в условиях города.
Известны две разновидности способов определения структуры симплексной радиосети с применением многопозиционного пеленгования, различающиеся принципами обработки сигналов. В основе первой группы способов - определение координат источников излучения, накопление засечек координат в зоне возможного нахождения передатчиков за все время наблюдения с последующим анализом результатов накопления. Суть способов второй группы состоит в регистрации моментов излучений, накоплении в течение длительности каждого излучения результатов многопозиционного пеленгования с последующим определением координат источников каждого излучения и идентификацией излучений по координатам источников.
Известен способ локализации источников радиоизлучений, включающий периодическое измерение собственных координат мобильной станции радиоконтроля, синхронно с этим прием радиоизлучения радиопередатчика и измерение пеленга на него, расчет пеленга из места нахождения мобильной станции радиоконтроля на каждую точку пространства, задаваемую с шагом квантования возможных значений координат радиопередатчика, определение и накопление по совокупности всех периодов измерения для каждой точки пространства квадрата разности измеренных и расчетных значений пеленга с образованием поля неопределенности, анализ поля неопределенности с локализацией изолированных областей как числа источников радиосети и определением координат их центров в качестве координат источников. [1. Ашихмин А.В., Жуков А.А., Козьмин В.А., Шадрин И.А. Локализация источников радиоизлучений и измерение напряженности поля с помощью мобильной станции радиоконтроля. Спецтехника, 2003. Специальный выпуск, с.14].
Область применения данного способа ограничена условием примерно одинаковой интенсивности выхода в эфир источников радиосети и наличия между ними значительного пространственного разноса, превышающего зоны разброса засечек координат отдельных источников. К недостаткам способа следует отнести также сложность автоматизации процесса анализа поля неопределенности, имеющего вследствие погрешностей измерений сложную многопиковую структуру с неизвестным и непостоянным уровнем фона.
Наиболее близким к предлагаемому способу по технической сущности является способ определения структуры систем связи, включающий периодическое измерение собственных координат мобильного пеленгатора, синхронно с этим прием сигналов с помощью антенн, образующих антенную решетку, и многоканального приемного устройства, обнаружение моментов излучения и измерение энергии принятых сигналов, преобразование обнаруженных радиосигналов в угловой спектр с определением по нему пеленгов и затем координат передатчиков триангуляционным способом с учетом собственных координат мобильного пеленгатора, идентификацию последовательно обнаруженных радиосигналов по координатам передатчиков, и в случае несовпадения координат передатчиков принятие решения о принадлежности излучений корреспондентам симплексной радиосети. [2. Патент РФ №2151406, G01S 5/04, 5/14, Н04В 17/00, опубл. 1999].
Ближайшему аналогу присущи следующие недостатки. Область применения способа ограничена условием наличия между пунктами приема значительного удаления, обеспечивающего определение координат передатчиков в каждом сеансе радиосвязи с точностью, достаточной для надежной пространственной идентификации. Очевидно, что в связи с этим данный способ практически не применим в мобильных пеленгаторах при кратковременных сеансах радиосвязи, когда точки пеленгования удалены на сравнительно небольшое (десятки-сотни метров) расстояние, линии пеленгов при этом практически не пересекаются. Другим недостатком является статистическая неустойчивость результатов идентификации при неопределенности о точности пеленгования, особенно в городских условиях. Основная причина при этом - неопределенность и неточность установки порогов принятия решения в связи с нестационарностью сигнально-помеховой обстановки. Это приводит как к ошибкам определения координат передатчиков, так и в целом состава радиосети.
Задачей данного изобретения является расширение функциональных возможностей, обеспечение применимости способа в мобильных пеленгаторах с повышением достоверности определения состава симплексной радиосети и местоположения ее передатчиков.
Технический результат, который может быть получен при осуществлении изобретения, - увеличение точности пеленгования, повышение достоверности определения состава симплексной радиосети и местоположения ее передатчиков.
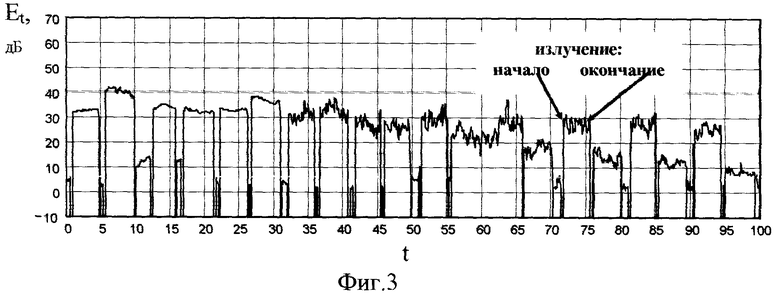
Поставленная задача и технический результат достигается за счет того, что в известном способе определения структуры симплексной радиосети мобильным пеленгатором, включающем периодическое измерение собственных координат мобильного пеленгатора, синхронно с этим прием сигналов с помощью антенн, образующих антенную решетку, и многоканального приемного устройства, обнаружение излучения, измерение энергии и преобразование принятых сигналов в угловой спектр, согласно изобретению угловой спектр нормируют на энергию принятых сигналов и преобразуют в мгновенный пространственный спектр, который накапливают в течение длительности каждого излучения с образованием текущего пространственного спектра и регистрацией его же по окончании первого излучения как первого эталона, по окончании последующих излучений эталоны корректируют при заданном ограничении количества, для чего оценивают меру близости между эталонами и текущим пространственным спектром и его минимальное значение, которую сравнивают с порогом идентификации, при превышении которого и выполнении ограничения количества измерений регистрируют очередной эталон, иначе к эталону с минимальной мерой близости прибавляют текущий пространственный спектр, после чего эталоны ранжируют в порядке убывания максимумов и, используя их как текущий пространственный спектр, пошагово преобразуют во вторичные эталоны, при этом корректируют эти эталоны при последовательном увеличении ограничения количества от одного до общего числа зарегистрированных эталонов, на каждом шаге определяют максимумы, сумму максимумов и приращение суммы максимумов вторичных эталонов относительно предыдущего шага, полученные приращения сравнивают с порогом разделения, при первом превышении которого процесс преобразования эталонов завершают, причем меру близости между эталоном и текущим пространственным спектром оценивают путем их суммирования, определения максимума суммарного спектра, его слагаемых и разности суммы максимумов слагаемых суммарного спектра и его максимума, число и координаты передатчиков радиосети определяют как число и координаты максимумов вторичных эталонов в момент завершения процесса преобразования эталонов, а мгновенный пространственный спектр определяют с учетом местоположения мобильного пеленгатора по формуле  , где
, где
Е - энергия принятых сигналов,
(X,Y) - собственные координаты мобильного пеленгатора в декартовой системе, (х,у) - координаты возможного местоположения передатчиков радиосети,
q(θ) - угловой спектр,
θ - направление на точки возможного местоположения передатчиков из местоположения мобильного пеленгатора.
При изучении других известных технических решений в данной области техники предлагаемая совокупность признаков, отличающая изобретение от ближайшего аналога, не выявлена.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
Фиг.1 изображает структурную схему мобильного пеленгатора для реализации заявленного способа;
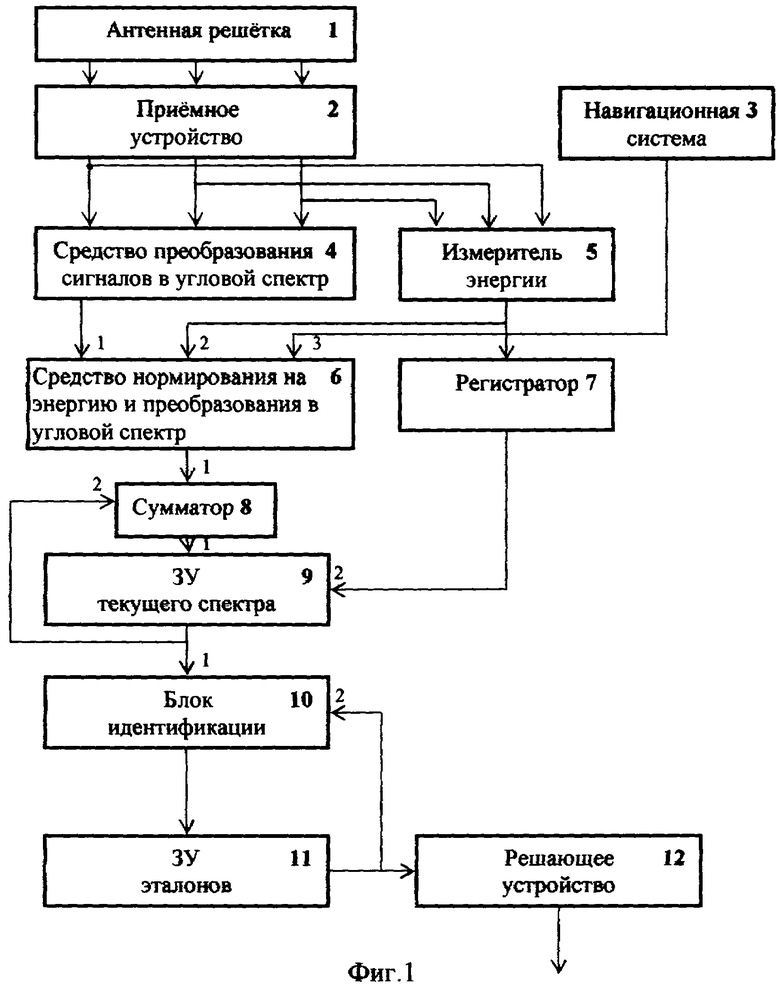
Фиг.2 - вид мгновенного пространственного спектра в декартовых координатах с линиями уровня;
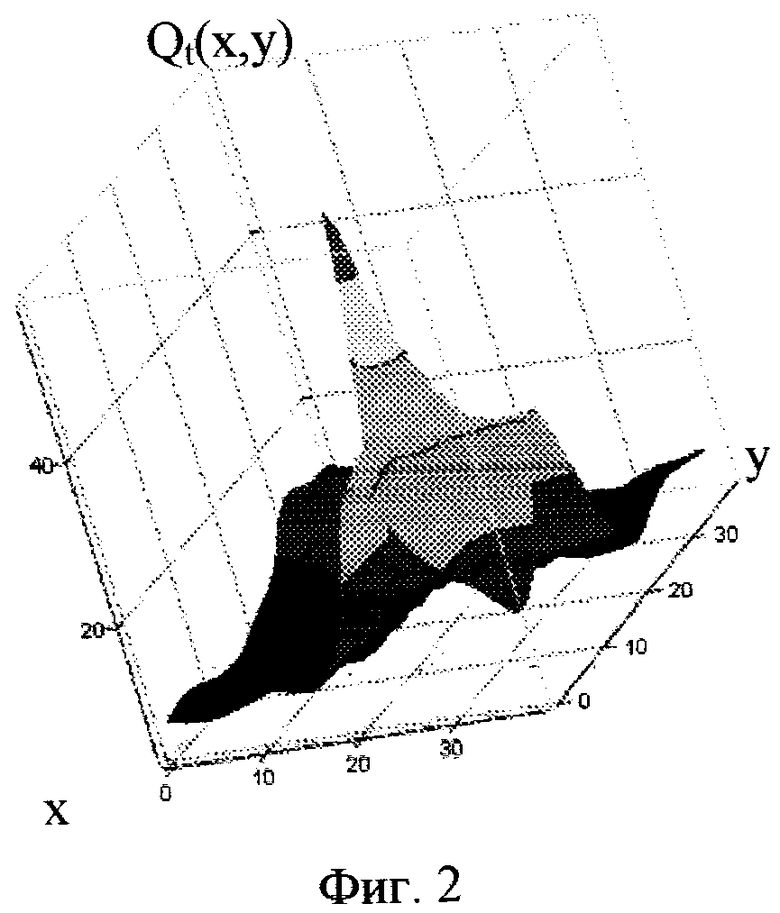
Фиг.3 - диаграмма радиообмена в виде зависимости энергии принятых сигналов от времени;
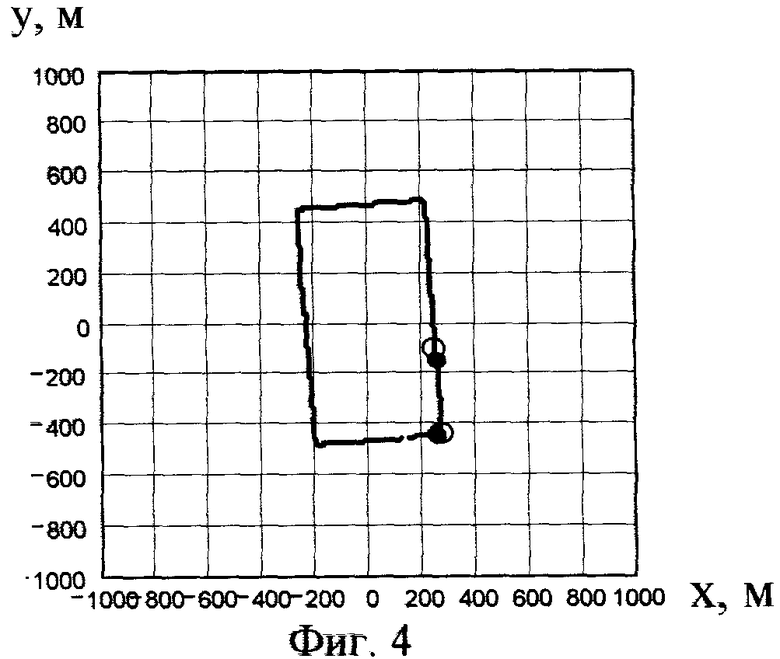
Фиг.4 - маршрут движения мобильного пеленгатора с результатами наблюдения.
Идея решения поставленной технической задачи состоит в переходе к одноэтапной обработке сигналов с получением, накоплением и использованием дополнительной информации о распределении радиоизлучений и помех во всей области возможного местоположения передатчиков, а не только в точке их оценочных координат, как это принято в ближайшем аналоге [2]. Соответственно изменяются признаки идентификации излучений (не координаты источников, а пространственный спектр излучений), операции и порядок обработки сигналов в обеспечение этого процесса.
Для этого в предлагаемом способе используют преобразование углового спектра в пространственный спектр. Предварительной нормировкой углового спектра на энергию, то есть делением всех его значений на максимально возможное значение (энергию), достигается инвариантность к мощности передатчиков радиосети. Поскольку угловой спектр зависит от места, где он измеряется, преобразование в пространственный спектр выполняют с учетом местоположения мобильного пеленгатора. Для этого в соответствии с определенным математическим выражением определяют направление из местоположения пеленгатора на каждую точку пространства (плоскости), после чего определяют соответствующее этому направлению значение нормированного углового спектра, а затем логарифмируют остаток от вычитания из единицы найденного значения нормированного углового спектра.
Независимость пространственного спектра от положения пеленгатора с максимумом в точке истинных координат передатчиков позволяет проводить его накопление во времени не допустимое для угловых спектров. Накопление выполняют в течение всей длительности каждого излучения (или заданного интервала времени) и по совокупности всех зарегистрированных излучений, что повышает точность измерений координат, достоверность определения состава радиосетей и непосредственно местоположения передатчиков. Особенность конкретно предложенного преобразования состоит в применении операции логарифмирования, что позволяет статистически оптимально накапливать пространственный спектр в условиях не стационарности сигнально-помеховой обстановки и использовать результаты накопления как эталонное описание последовательно обнаруживаемых излучений.
При этом определяют меру близости между эталонами и идентифицируемым пространственным спектром как разность максимальных значений пространственных спектров в предположении принадлежности излучений одному или различным источникам. Для определения такой меры близости сравниваемые спектры суммируют, полагая, что они получены по излучениям одного источника, и определяют максимум такого суммарного спектра. А также определяют максимумы каждого из сравниваемых спектров в предположении принадлежности их разным источникам. После чего определяют меру близости между эталоном и текущим спектром как разность суммы максимумов сравниваемых спектров и максимума суммарного объединенного спектра. Указанными действиями достигается статистическая устойчивость решений в широком диапазоне изменения отношения сигнал/помеха.
Согласно предлагаемому способу процесс непосредственно принятия решений о числе и координатах источников имеет двухступенчатый характер. Первоначально формируют эталонное описание передатчиков радиосети при ограничении их числа, то есть в предположении, что число передатчиков радиосети не более заданного. Первый эталон регистрируют как мгновенный пространственный спектр непосредственно по окончании первого излучения. В последующем в зависимости от результатов идентификации регистрируют очередной эталон или к эталону с минимальной мерой близости прибавляют текущий пространственный спектр. На втором этапе оценивают число передатчиков и их координаты путем повторной идентификации и преобразования зарегистрированных эталонов во вторичные эталоны при последовательном увеличении ограничения количества эталонов. Указанным действием достигается устранение возможных дроблений эталонов при действии помех.
Таким образом, переход к одноэтапной обработке сигналов с получением, накоплением и использованием дополнительной информации о распределении радиоизлучений во всей области возможного местоположения передатчиков в соответствии с предложенными новыми действиями над сигналами, условиями и порядком их выполнения позволяет расширить область применимости способа, обеспечивает применимость способа в мобильных пеленгаторах и повышает достоверность определения состава симплексной радиосети и местоположения ее передатчиков.
Поскольку заявленный способ может быть реализован при использовании соответствующего мобильного пеленгатора, то далее описывается характерный состав функциональных элементов такого пеленгатора.
Мобильный пеленгатор (фиг.1), реализующий предложенный способ, содержит антенную решетку 1, приемное устройство 2, навигационную систему 3, средство 4 преобразования сигналов в угловой спектр, измеритель 5 энергии, средство 6 нормирования на энергию и преобразования в угловой спектр, регистратор 7, сумматор 8, запоминающее устройство 9 (ЗУ) текущего спектра, блок идентификации 10, ЗУ 11 эталонов, решающее устройство 12. Выходы антенной решетки 1 через приемное устройство 2, средство 4 преобразования сигналов в угловой спектр, первые входы средства 6 нормирования на энергию и преобразования в угловой спектр, сумматора 8, ЗУ 9 текущего спектра, блока 10 идентификации, вход ЗУ 11 эталонов, его первый выход и решающее устройство 12 соединены последовательно. Выходы приемного устройства 2 подключены к входу измерителя 5 энергии и через его выход к входу регистратора 7 и второму входу средства 6 нормирования на энергию и преобразования в угловой спектр, к третьему входу которого подключен выход навигационной системы 3. Регистратор 7 выходом соединен со вторым входом ЗУ 9 текущего спектра, выход которого соединен со вторым входом сумматора 8. Выход ЗУ 11 эталонов подключен ко второму входу блока 10 идентификации. Выходом мобильного пеленгатора является выход решающего устройства 12.
Указанные элементы содержатся, например, в составе мобильного пеленгатора «Аргумент» [3. Глазнев А.А, Козьмин В.А., Литвинов Г.В., Шадрин И.А. Многостанционные системы радиоконтроля и определения местоположения источников радиоизлучения. Спецтехника, 2002, с.9-11]: антенная решетка 1, приемное устройство 2, навигационная система 3 - непосредственно, а другие элементы могут быть введены в состав блока аналого-цифровой обработки сигналов и вычислительной системы станции.
Прием радиосигналов передатчиков радиосети выполняют с помощью идентичных антенн типа вертикальный вибратор, образующих кольцевую антенную решетку 1, и многоканального приемного устройства 2 с числом каналов не меньше двух, предпочтительнее с числом каналов, равным числу антенн. Антенная решетка 1 содержит M≥3 антенн с номерами m=0, 1, …, М-1. Антенна с номером m=0 ориентирована по курсу движения, нумерация других антенн по часовой стрелке в порядке возрастания номеров. С выхода навигационной системы 3 снимают значения собственных координат мобильного пеленгатора. Прием сигналов передатчиков радиосети и измерения в навигационной системе 3 выполняют синхронно. Период измерений определяется быстродействием данных блоков и системы последующей обработки, типовое его значение 1 секунда. В приемном устройстве осуществляют фильтрацию принятых сигналов на частоте радиосети и квадратурную обработку с цифровым представлением сигналов в виде квадратурных составляющих, например, по варианту, приведенному в [4. Побережский К.С. Цифровые радиоприемные устройства. M., Радио и связь, 1987, с.67-68, рис.3.14]. Средство 4 обеспечивает преобразование принятых сигналов в угловой спектр, а измеритель 5 производит измерение их суммарной по совокупности антенн энергии. Нормировка на энергию и преобразование углового спектра в мгновенный пространственный спектр выполняют в средстве 6 с учетом местоположения пеленгатора, определяемого навигационной системой 3. С помощью сумматора 8 и запоминающего устройства 9 проводят накопление мгновенного спектра в течение длительности каждого излучения. Процесс накопления в ЗУ 9 управляется сигналами регистратора 7, обеспечивающими обнаружение излучения с фиксацией моментов его начала и окончания таким образом, что в момент регистрации окончания излучения на выходе ЗУ 9 образуется текущий пространственный спектр. Объем ЗУ 9 определяется шагом квантования возможной зоны нахождения передатчиков радиосети. Координаты точек пространства определяют аналогично принятому в [1] путем равномерного квантования рабочей зоны, то есть зоны пространства возможного нахождения передатчиков радиосети. Шаг квантования определяют, исходя из обеспечения однозначности регистрации основного пика текущего пространственного спектра. Максимальное значение шага квантования практически не должно превышать величины 50 м. В типовых условиях применения мобильного пеленгатора общее число точек пространства в зоне 10×10 км составит порядка 4·104, соответственно и объем запоминающего устройства 9 должен быть не менее этой величины. В исходном состоянии и при регистрации отсутствия излучений в ЗУ 9 осуществляют запись нулевых значений спектра. Запоминающее устройство 11 предназначено для хранения эталонов. Его объем определяют, исходя из максимального числа передатчиков в составе радиосети, обычно не более пяти. Блок 10 идентификации реализует операции определения меры близости спектров, их минимума, сравнения с порогом идентификации, корректировки эталонов. Решающее устройство 12 обеспечивает ранжирование и преобразование эталонов с определением числа и координат передатчиков радиосети.
Принцип последующего функционирования мобильного пеленгатора, в котором реализуется предложенный способ, состоит в следующем.
В процессе движения с помощью навигационной системы 3 периодически измеряют собственные координаты мобильного пеленгатора Zt=Yt+i·Xt, где t=1, 2, … - номер периода измерения, i - мнимая единица. Координаты пеленгатора представлены в декартовой системе в комплексном виде.
Одновременно с этим с помощью антенной решетки 1 и приемного устройства 2 принимают сигналы передатчиков с их квадратурным преобразованием и представлением в комплексном виде St,m, где m - номер антенны. В измерителе 5 определяют энергию сигналов, принятых всеми антеннами путем квадратичного детектирования и суммирования

Одновременно с этим принятые сигналы в средстве 6 преобразуют в угловой спектр путем компенсации фазовых набегов когерентного сложения и детектирования

где |θ|≤π - направление на точку пространства из местоположения мобильного пеленгатора, R - радиус антенной решетки, λ - длина волны излучения.
В случае применения двухканального приемного устройства с поочередным подключением антенн относительно опорной антенны [3] преобразования (1), (2) не изменяются, но предварительно выполняют комплексное перемножение и нормировку  , где стрелка указывает на операцию изменения величины слева от нее на значение в правой части формулы, черта над величиной обозначает операцию комплексного сопряжения; в правой части без штриха указаны данные коммутируемого канала, а со штрихом - опорного канала.
, где стрелка указывает на операцию изменения величины слева от нее на значение в правой части формулы, черта над величиной обозначает операцию комплексного сопряжения; в правой части без штриха указаны данные коммутируемого канала, а со штрихом - опорного канала.
Угловой спектр (2) характеризует распределение мощности принятых сигналов по возможным направлениям на излучатель, его максимальное значение не превосходит значения энергии (1). Так как направление на источник определяют из места расположения пеленгатора, очевидно, что угловой спектр зависит не только от положения излучателя, но и момента измерения при движении пеленгатора. Поэтому для проведения в последующем накопления информации в единой системе координат в средстве 6 осуществляют нормирование на энергию и преобразование углового спектра (2) в мгновенный пространственный спектр Qt(x, y) с учетом собственных координат мобильного пеленгатора

где (х,у) и (Xt,Yt) - возможные (квантованные с заданным шагом квантования) значения координат передатчиков радиосети в декартовой системе и собственные координаты мобильного пеленгатора в момент времени t.
В соответствии с формулой (3) преобразование углового спектра в мгновенный пространственный спектр выполняют следующим образом. Во-первых, определяют направление из местоположения пеленгатора на каждую точку пространства  . Во-вторых, определяют соответствующее найденному направлению значение нормированного углового спектра
. Во-вторых, определяют соответствующее найденному направлению значение нормированного углового спектра  . Нормировкой углового спектра на энергию, то есть делением каждого из значений спектра на общее максимально возможное значение достигается ограничение его диапазона изменения. Наконец, в-третьих, на завершающей стадии преобразования логарифмируют остаток от вычитания из единицы найденного значения нормированного углового спектра. В данном конкретном исполнении, когда координаты представлены дискретными значениями с заданным шагом квантования рабочей зоны, пространственный спектр будет двумерной функцией двух дискретных квантованных переменных (х,у).
. Нормировкой углового спектра на энергию, то есть делением каждого из значений спектра на общее максимально возможное значение достигается ограничение его диапазона изменения. Наконец, в-третьих, на завершающей стадии преобразования логарифмируют остаток от вычитания из единицы найденного значения нормированного углового спектра. В данном конкретном исполнении, когда координаты представлены дискретными значениями с заданным шагом квантования рабочей зоны, пространственный спектр будет двумерной функцией двух дискретных квантованных переменных (х,у).
Необходимые для преобразования (3) входные данные поступают на средство 6 со средства 4 преобразования сигналов в угловой спектр по входу 1, с измерителя 5 энергии по входу 2 и с навигационной системы по входу 3. Типичный вид пространственного спектра (3) в декартовых координатах приведен на фиг.2, максимум спектра расположен в точке истинных координат излучения, а его значение в этой точке характеризует отношение сигнал/помеха в момент измерений.
По результатам измерения энергии (1) регистратор 7 выполняет обнаружение излучения с фиксацией моментов его начала и окончания, как это показано стрелками для одного из сеансов связи на диаграмме радиообмена фиг.3. При этом для регистрации факта наличия сигнала значение энергии сравнивают с порогом обнаружения, а для фиксации моментов начала/окончания излучения используют известный [2] принцип сравнения результатов обнаружения сигнала в текущем и предыдущем периоде измерений. При этом началу излучения соответствует ситуация отсутствия сигнала в предыдущем периоде и наличия его в текущем, а окончанию излучения - наличие сигнала в предыдущем периоде и отсутствие его в текущем периоде измерения. В случае излучений большой длительности и потребности определения координат источника до физического окончания излучения фиксация моментов времени начала-окончания излучений может выполняться принудительно с заданным темпом.
Таким образом, на выходе регистратора 7 формируется сигнал управления в виде логической единице в течение длительности излучения, который управляет работой ЗУ 9 по второму его входу, где мгновенные пространственные спектры накапливают в течение длительности Т каждого излучения. Процесс накопления состоит в следующем. По окончании каждого периода измерений на первый вход сумматора 8 поступает очередной мгновенный пространственный спектр, а на второй вход результат предыдущего накопления с выхода ЗУ 9. Вновь образованная сумма с выхода сумматора 8 поступает на первый вход ЗУ 9 и запоминается с образованием в момент окончания излучения текущего пространственного спектра, как результата суммирования всех полученных в течение длительности излучения мгновенных спектров

В момент начала очередного излучения по переднему фронту сигнала регистратора 7, то есть при переходе от нуля к единице, ЗУ 9 обнуляется, с его выхода на вход сумматора 8 поступает ноль, и очередной мгновенный пространственный спектр, складываясь с нулем, заносится в ЗУ 9. После чего процесс накопления продолжается описанным выше образом до окончания очередного излучения.
В момент окончания каждого излучения текущий пространственный спектр (4) с выхода ЗУ 9 подают на первый вход блока 10, где проводят идентификацию этого спектра с имеющимися в ЗУ 11 эталонами. Причем по окончании первого излучения в силу тривиальности задачи идентификации (единственного излучения) текущий пространственный спектр непосредственно выдают на выход блока 10 и регистрируют его в ЗУ 11 как первый эталон:  , где k=1, 2 … - номер эталона, в данном случае k=1.
, где k=1, 2 … - номер эталона, в данном случае k=1.
По окончании второго и последующих излучений в блоке 10 идентификации эталоны корректируют при заданном ограничении количества (пять). Результатом корректировки в зависимости от принимаемого решения может быть или регистрация очередного эталона или уточнение уже имеющегося.
Для выполнения корректировки осуществляют преобразование между каждым из эталонов, зарегистрированных в ЗУ 11, и очередным текущим пространственным спектром. Для этого сравниваемые спектры (один из запомненных как эталон Gk(x,y) и очередной текущий пространственный спектр  в предположении принадлежности сравниваемых спектров одному источнику излучения суммируют и определяют максимум по возможным координатам (х,у) суммарного спектра, то есть
в предположении принадлежности сравниваемых спектров одному источнику излучения суммируют и определяют максимум по возможным координатам (х,у) суммарного спектра, то есть  . Аналогично в предположении принадлежности спектров разным источникам определяют максимумы каждого из сравниваемых спектров, то есть
. Аналогично в предположении принадлежности спектров разным источникам определяют максимумы каждого из сравниваемых спектров, то есть  и
и  . Затем определяют разность суммы максимумов слагаемых суммарного спектра (эталона и текущего спектра) и его максимума
. Затем определяют разность суммы максимумов слагаемых суммарного спектра (эталона и текущего спектра) и его максимума

Так как сумма максимумов частей всегда больше максимума суммы (целого), то результат преобразования (5) есть величина положительная и стремится к нулю при принадлежности текущего пространственного спектра и эталона одному источнику излучения. Поэтому осуществленное преобразование (5) действительно является мерой близости сравниваемых пространственных спектров. Характерной особенностью при этом является весьма слабая зависимость меры близости при идентификации спектров одного объекта как от конкретных координат объекта, так и от отношения сигнал-помеха, числа накоплений спектров.
После проведенных преобразований определения в соответствии с выражением (5) находят среди них минимум между текущим пространственным спектром и эталонами

тем самым определяют и ближайший по мере близости эталон.
Затем минимальное значение ρmin сравнивают с порогом идентификации и при его превышении и выполнении ограничения количества (заданного объема ЗУ 11) регистрируют очередной эталон. В противном случае к эталону с минимальным значением ρmin, то есть с номером 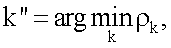 прибавляют текущий пространственный спектр
прибавляют текущий пространственный спектр

Стрелка по-прежнему указывает на операцию замены, в данном случае эталона на сумму эталона и текущего пространственного спектра излучения.
При поступлении данных о ранее зарегистрированном излучении (повторном выходе в эфир одного и того же корреспондента радиосети) преобразование (5) в сочетании с преобразованием (3) обеспечивает инвариантность статистических свойств меры близости в широком диапазоне изменения отношения сигнал/помеха. Это позволяет независимо от числа накоплений и отношения сигнал/шум устанавливать фиксированный порог идентификации, рекомендуемое значение которого - 1,5. Данное значение порога соответствует вероятности правильной идентификации, то есть не превышения порога идентификации при повторном выходе в эфир одного и того же корреспондента, равной 0,9. Таким образом, с достаточно высокой вероятностью - 0,9 при повторном выходе корреспондента в эфир произойдет уточнение (7) эталона.
Однако воздействие помех приводит к искажениям принимаемых сигналов и погрешностям идентификации, в частности ложного дробления эталонов при излучении одного источника. Для снижения этих погрешностей в решающем устройстве 12 эталоны ранжируют в порядке убывания максимумов и, используя их как последовательные значения текущего пространственного спектра (4), то есть, осуществляя замену  , где Gk(x,y) - ранжированные эталоны, пошагово, для k=1, 2 и далее, преобразуют во вторичные эталоны с повторным выполнением операций (5)-(7). Процесс преобразования совокупности эталонов во вторичные эталоны основан на проверке статистических гипотез о числе передатчиков радиосети. Особенность процесса преобразования состоит в том, что вторичные эталоны корректируют при последовательном увеличении ограничения их количества от одного до общего числа зарегистрированных эталонов. В результате на первом шаге процесса преобразования эталонов получают один вторичный эталон (как сумму всех эталонов при ограничении на число вторичных эталонов на данном шаге, равном 1), на втором шаге - два вторичных эталона и так далее до общего количества зарегистрированных эталонов. На каждом шаге (при каждом ограничении) определяют максимумы каждого вторичного эталона и сумму максимумов вторичных эталонов, полученных на этом шаге, а также приращение суммы максимумов вторичных эталонов относительно предыдущего ограничения (шага процесса преобразования эталонов). В силу указанного ранее свойства максимумов целого и частей приращение суммы максимумов всегда положительно, причем, начиная с шага, соответствующего истинному числу передатчиков, значение приращения быстро убывает до помехового уровня. Поэтому полученные приращения на каждом шаге сравнивают с порогом разделения и при первом превышении порога разделения процесс преобразования эталонов завершают. При этом число и координаты передатчиков радиосети определяют как число и координаты максимумов вторичных эталонов на момент завершения процесса преобразования эталонов. Процесс преобразования эталонов осуществляют в естественных граничных условиях. В частности, сумма максимумов вторичных эталонов в исходном состоянии (на нулевом шаге, предшествующем началу процесса) равна нулю, процесс завершают на шаге, не превышающем общее число зарегистрированных эталонов, даже если не происходит останова процесса по условию сравнения с порогом разделения. В последнем случае число передатчиков равно номеру финального шага, то есть числу зарегистрированных эталонов. Порог разделения устанавливают, исходя из задаваемого значения суммы максимумов вторичных эталонов на текущем шаге, рекомендуемое значение 0,1 от суммы максимумов. По мере движения пеленгатора и проведения новых измерений описанный процесс обработки циклически повторяют. При этом операции преобразования во вторичные эталоны и вывода результатов могут выполняться не постоянно, а, например, по требованию оператора, что снижает затраты ресурсов и времени на их выполнение.
, где Gk(x,y) - ранжированные эталоны, пошагово, для k=1, 2 и далее, преобразуют во вторичные эталоны с повторным выполнением операций (5)-(7). Процесс преобразования совокупности эталонов во вторичные эталоны основан на проверке статистических гипотез о числе передатчиков радиосети. Особенность процесса преобразования состоит в том, что вторичные эталоны корректируют при последовательном увеличении ограничения их количества от одного до общего числа зарегистрированных эталонов. В результате на первом шаге процесса преобразования эталонов получают один вторичный эталон (как сумму всех эталонов при ограничении на число вторичных эталонов на данном шаге, равном 1), на втором шаге - два вторичных эталона и так далее до общего количества зарегистрированных эталонов. На каждом шаге (при каждом ограничении) определяют максимумы каждого вторичного эталона и сумму максимумов вторичных эталонов, полученных на этом шаге, а также приращение суммы максимумов вторичных эталонов относительно предыдущего ограничения (шага процесса преобразования эталонов). В силу указанного ранее свойства максимумов целого и частей приращение суммы максимумов всегда положительно, причем, начиная с шага, соответствующего истинному числу передатчиков, значение приращения быстро убывает до помехового уровня. Поэтому полученные приращения на каждом шаге сравнивают с порогом разделения и при первом превышении порога разделения процесс преобразования эталонов завершают. При этом число и координаты передатчиков радиосети определяют как число и координаты максимумов вторичных эталонов на момент завершения процесса преобразования эталонов. Процесс преобразования эталонов осуществляют в естественных граничных условиях. В частности, сумма максимумов вторичных эталонов в исходном состоянии (на нулевом шаге, предшествующем началу процесса) равна нулю, процесс завершают на шаге, не превышающем общее число зарегистрированных эталонов, даже если не происходит останова процесса по условию сравнения с порогом разделения. В последнем случае число передатчиков равно номеру финального шага, то есть числу зарегистрированных эталонов. Порог разделения устанавливают, исходя из задаваемого значения суммы максимумов вторичных эталонов на текущем шаге, рекомендуемое значение 0,1 от суммы максимумов. По мере движения пеленгатора и проведения новых измерений описанный процесс обработки циклически повторяют. При этом операции преобразования во вторичные эталоны и вывода результатов могут выполняться не постоянно, а, например, по требованию оператора, что снижает затраты ресурсов и времени на их выполнение.
Эффективность изобретения выражается в расширении функциональных возможностей, обеспечении применимости способа в мобильных пеленгаторах с повышением достоверности определения состава симплексной радиосети и местоположения ее передатчиков.
Количественная оценка выполнена с применением мобильного пеленгатора «Аргумент» [3], антенная решетка которого состоит из 9 антенн. Радиус решетки равен 0,66 м. Контролируемая радиосеть включала два пространственно разнесенных передатчика с мощностью излучения 0,1 Вт и длиной волны 0,644 м, которые поочередно выходили в эфир примерно на 4 с, что отражено на диаграмме радиообмена фиг.3. Период измерений соответствовал темпу выдачи данных GPS навигационной системы и составлял 1 с. Движение пеленгатора осуществлялось в городских кварталах по маршруту в виде прямоугольника, выделенного на фиг.4 замкнутой линией. При обработке возможная зона нахождения передатчиков радиосети ограничивалась участком пространства 2000×2000 м, шаг квантования пространства 50 м, принятое максимальное число передатчиков в составе радиосети и, соответственно, ограничение количества регистрируемых спектров излучений - 5. Особенность мобильного пеленгатора состоит в применении двухканального приемного устройства с поочередным подключением антенн относительно опорной антенны с номером 0. При этом энергия и угловой спектр определялись в соответствии с формулами (1), (2) и оговоренной для этого случая нормировкой.
По результатам приема и обработки сигналов за время движения пеленгатора зарегистрировано два передатчика радиосети, что соответствует истинному значению, а их измеренные координаты, указанные жирными точками на фиг.4, соответствуют истинным координатам (кружки на фиг.4) с погрешностью не более 75 м.
Наибольший эффект от применения предлагаемого способа наблюдается на начальном участке пути при применении в радиосетях кратковременных сообщений, когда ближайший аналог практически не применим из-за малого пройденного пути, соответственно, малого значения пеленгаторной базы, не обеспечивающего надежного разделения излучений по координатам. При наблюдениях сигналов большой длительности предлагаемый способ обеспечивает повышение достоверности определения состава симплексной радиосети и местоположения ее передатчиков прежде всего за счет получения, накопления и использования информации о распределении радиоизлучений во всей области возможного местоположения передатчиков. В частности, только за счет обеспечения возможности накопления данных увеличение точности, пропорциональное корню квадратному из числа накоплений, может достигать десяти раз.
Наиболее успешно заявленный способ определения структуры симплексной радиосети мобильным пеленгатором промышленно применим для нахождения местоположения корреспондентов и определения состава радиосетей коротковолнового и ультракоротковолнового диапазона в городских условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ БАЗОВОЙ СТАНЦИИ | 2011 |
|
RU2454000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТНОГО СДВИГА МЕЖДУ РАДИОСИГНАЛАМИ | 2017 |
|
RU2668342C2 |
| СПОСОБ АМПЛИТУДНОГО ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2686113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2697428C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
Изобретение может быть использовано в системах радиоконтроля. Достигаемым техническим результатом является повышение точности и достоверности пеленгования. Указанный результат достигается тем, что измеряют собственные координаты мобильного пеленгатора и синхронно принимают сигналы с помощью антенной решетки и многоканального приемного устройства. Измеряют энергию излучения и преобразуют в угловой спектр. Угловой спектр нормируют на энергию принятых сигналов и преобразуют в мгновенный пространственный спектр, который накапливают в течение длительности каждого излучения с образованием текущего пространственного спектра и регистрацией его по окончании первого излучения как первого эталона. По окончании последующих излучений эталоны корректируют при заданном ограничении их количества, ранжируют в порядке убывания максимумов и, используя их как текущий пространственный спектр, пошагово преобразуют во вторичные эталоны, при этом корректируют эти эталоны при последовательном увеличении ограничения количества от одного до общего числа зарегистрированных эталонов. На каждом шаге определяют приращение суммы максимумов вторичных эталонов относительно предыдущего шага, полученные приращения сравнивают с порогом разделения, при первом превышении которого процесс преобразования эталонов завершают.Число и координаты передатчиков радиосети определяют как число и координаты максимумов вторичных эталонов в момент завершения процесса преобразования эталонов, а мгновенный пространственный спектр определяют с учетом местоположения мобильного пеленгатора по указанной формуле. 4 ил.
Способ определения структуры симплексной радиосети мобильным пеленгатором, включающий периодическое измерение собственных координат мобильного пеленгатора, синхронно с этим прием сигналов с помощью антенн, образующих антенную решетку, и многоканального приемного устройства, обнаружение излучения, измерение энергии и преобразование принятых сигналов в угловой спектр, отличающийся тем, что угловой спектр нормируют на энергию принятых сигналов и преобразуют в мгновенный пространственный спектр, который накапливают в течение длительности каждого излучения с образованием текущего пространственного спектра и регистрацией его же по окончании первого излучения как первого эталона, по окончании последующих излучений эталоны корректируют при заданном ограничении количества, для чего оценивают меру близости между эталонами и текущим пространственным спектром и ее минимальное значение, которую сравнивают с порогом идентификации, значение которого устанавливают фиксированным, исходя из задаваемой вероятности не превышения его при повторном выходе в эфир одного и того же корреспондента, при превышении которого и выполнении ограничения количества измерений регистрируют очередной эталон, иначе к эталону с минимальной мерой близости прибавляют текущий пространственный спектр, после чего эталоны ранжируют в порядке убывания максимумов и, используя их как текущий пространственный спектр, пошагово преобразуют во вторичные эталоны, при этом корректируют эти эталоны при последовательном увеличении ограничения количества от одного до общего числа зарегистрированных эталонов, на каждом шаге определяют максимумы, сумму максимумов и приращение суммы максимумов вторичных эталонов относительно предыдущего шага, полученные приращения сравнивают с порогом разделения, устанавливаемым исходя из задаваемого значения от суммы максимумов вторичных эталонов на текущем шаге, при первом превышении которого процесс преобразования эталонов завершают, причем меру близости между эталоном и текущим пространственным спектром оценивают путем их суммирования, определения максимума суммарного спектра, его слагаемых и разности суммы максимумов слагаемых суммарного спектра и его максимума, число и координаты передатчиков радиосети определяют как число и координаты максимумов вторичных эталонов в момент завершения процесса преобразования эталонов, а мгновенный пространственный спектр определяют с учетом местоположения мобильного пеленгатора по формуле
,
где E - энергия принятых сигналов;
(X,Y) - собственные координаты мобильного пеленгатора в декартовой системе;
(х,у) - координаты возможного местоположения передатчиков радиосети;
q(θ) - угловой спектр;
θ - направление на точки возможного местоположения передатчиков из местоположения мобильного пеленгатора.
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИСТЕМ СВЯЗИ | 1999 |
|
RU2151406C1 |
| СПОСОБ ПОИСКА ПЕРЕДАТЧИКОВ СЛОЖНЫХ СИГНАЛОВ | 2006 |
|
RU2319976C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| US 7268728 В1, 11.09.2007 | |||
| Способ получения суррогата резины | 1928 |
|
SU15041A1 |
| JP 3068100 A, 25.03.1991. | |||

