Изобретение относится к области технической кибернетики, а именно к микропроцессорным цифровым системам автоматического управления объектами с электроприводами постоянного тока, и может быть использовано преимущественно в системах управления оптико-электронными обзорными системами.
Микропроцессорные цифровые системы автоматического управления объектами с электроприводами постоянного тока широко известны в технической и патентной литературе.
Известна монография «Микропроцессорные системы автоматического управления» под общей редакцией В.А.Бесекерского, Ленинград, «Машиностроение», 1988 г., где рассмотрены основные принципы создания и представлены типовые структуры цифровых систем автоматического управления (САУ) на базе микропроцессорной техники. Структурные схемы таких микропроцессорных САУ содержат цифровое управляющее устройство (ЦУУ), объект управления (ОУ), исполнительные устройства (ИУ), аналого-цифровые преобразователи (АЦП), цифроаналоговые преобразователи (ЦАП) и источники входных аналоговых сигналов, которые также подвергаются преобразованию с помощью АЦП цифрового управляющего устройства.
Такие схемы обладают потенциально высокими точностными характеристиками благодаря применению микропроцессорной техники.
Недостатками их являются, во-первых, наличие аналого-цифровых (АЦП) и цифро-аналоговых (ЦАП) преобразователей, работающих при слабых токах до 1 мА и малых напряжениях постоянного тока. В то время, как для электроприводов постоянного тока с якорным управлением требуются относительно высокие напряжения с токами до 10А и более, поэтому входные или выходные напряжения АЦП и ЦАП необходимо усиливать с помощью многокаскадных усилителей постоянного тока, имеющих большой коэффициент усиления.
К тому же, как правило, преобразователи ЦАП и АЦП конструктивно размещают в цифровом управляющем устройстве (ЦУУ) и преобразуемые сигналы подводятся к ним по длинным проводам, подвергаясь влиянию наводок силовых цепей, при этом входные и выходные аналоговые сигналы обычно содержат наведенные шумы случайного характера, которые в результате усиления являются источниками погрешности цифровой системы. К ним добавляются шумы квантования и «дрейф нуля» усилителей постоянного тока ЦАП и АЦП.
Во-вторых, усилитель мощности постоянного тока обладает низким коэффициентом полезного действия, что приводит к повышенному тепловыделению и нарушению теплового режима информационных приборов (телевизор, тепловизор), которые размещаются обычно в замкнутых конструктивных объемах.
В третьих, указанные микропроцессорные системы являются монофункциональными, в то время как для управления оптико-электронными обзорными системами требуется расширение функциональных возможностей путем кибернетизации цифровых САУ с обеспечением многорежимности управления при единой аппаратурной реализации.
Из практики разработки и эксплуатации оптико-электронных обзорных систем известно, что наблюдение производится в различных режимах: при общем обзоре панорамы перемещение оптической линии визирования происходит со средней скоростью; при перебросах линии визирования требуется максимальная скорость; при обнаружении и распознавании объекта наблюдения обычно требуется весьма медленная и плавная скорость перемещения.
При этом известны различные дискретные системы автоматического регулирования: импульсные системы с амплитудной модуляцией, системы с широтно-импульсной модуляцией, релейные системы и цифровые.
Аналоговая САУ не обеспечивает плавного перемещения объекта при весьма медленном перемещении. Преодоление сухого трения в редукторе и других механических сопряжениях происходит неравномерно, с некоторыми рывками, что затрудняет процесс наблюдения и распознавания.
Импульсные системы обеспечивают на малой скорости плавное перемещение линии визирования при равномерном преодолении сухого трения. Однако импульсные системы имеют пониженное быстродействие в целом, что является их недостатком.
Системы с широтно-импульсной модуляцией более экономичны в потреблении электроэнергии, обусловливают минимальное тепловыделение, однако при работе в области нуля управляющие сигналы становятся весьма короткими, а процесс управления неэффективным.
Релейные системы обеспечивают максимальные воздействия на объект управления при необходимости быстрых перемещений. Структурно релейные системы наиболее просты, но динамика режима управления очень затруднительна.
Перечисленные дискретные системы схемно и конструктивно имеют различную аппаратурную реализацию. Поэтому исключается возможность их агрегатирования с целью обеспечения функционирования в различных режимах автоматического управления объектом управления.
Все это обусловливает в совокупности значительное ограничение потенциально высокой точности цифровой системы, усложняет структуру и аппаратурную реализацию, снижает эксплуатационную надежность обзорных систем в целом.
Наиболее близким по технической сущности является «Блок сервопривода» по заявке РСТ (WO) №84/03572, МКИ G 05 D 3/12, Н 02 Р 5/34, опубл. 13.09.84 г., приор. 04.03.83 г. (IP), который позволяет использовать общее аппаратное обеспечение при различных режимах управления путем изменения программы, управляющей процессом в соответствии с заданным режимом управления.
Данная САУ содержит ЦУУ с процессором, ОУ с электроприводом постоянного тока, цифровой датчик угла, пульт управления, релейный усилитель мощности, АЦП, счетчик, таймер и программные средства управления.
Процессор в ЦУУ считывает различные программы управления из запоминающего устройства по командам со схемы интерфейса и подготавливает команды управления релейным усилителем мощности по входному сигналу тока якоря с аналого-цифрового преобразователя и входному сигналу угла поворота со счетчика.
Команда управления усилителем мощности через порт ввода-вывода поступает на таймер и управляет усилителем мощности. Таким образом изменяют ток электропривода и тем самым определяют режим работы электропривода с ОУ.
Данное техническое решение выбрано за прототип и использует принцип многорежимного управления, обеспеченный программными средствами при использовании общего аппаратного обеспечения.
К недостаткам прототипа относится содержание аналого-цифрового преобразователя (АЦП) и несовершенство режима управления электроприводом за счет использования релейного усилителя мощности путем изменения тока якорной цепи, что дает невысокую точность управления.
Заявляемое изобретение направлено на решение имеющейся в теории и практике автоматического управления технической проблемы по созданию кибернетической микропроцессорной цифровой системы с многофункциональным режимом управления.
Заявляемое техническое решение представляет собой кибернетическую микропроцессорную цифровую систему, содержащую цифровое управляющее устройство, объект управления с электроприводом постоянного тока, цифровые датчики угла, цифровой пульт управления и цифровой усилитель мощности, при этом цифровой усилитель мощности содержит входной регистр, выводы которого в параллельном коде подключены к двум буферным регистрам, каждый их которых подключен к усилителям-преобразователям уровня напряжения с нагрузочными резисторами с двоичным весом, соединенными с суммирующим масштабным резистором, подключенным к высокому потенциалу источника питания, образующими два делителя напряжения, выходные напряжения которых подключены к транзисторному мосту, содержащему четное число пар транзисторов, одна группа которых включена в режим эмиттерного повторителя, а другая группа транзисторов - в ключевой режим.
Такая кибернетическая цифровая система имеет прямое микропроцессорное управление электроприводами постоянного тока и обеспечивает все перечисленные виды режимов работ: квазинепрерывный, импульсный с амплитудной модуляцией, импульсный с широтно-импульсной модуляцией и релейный при единой схемной и конструктивной аппаратурной реализации, при этом исключено использование ЦАП и АЦП.
Исключение ЦАП и АЦП совместно с усилителями постоянного тока возможно благодаря примененному цифровому усилителю мощности, который реализует их функции и непосредственно управляет цифровыми сигналами микропроцессора, обеспечивая формирование всех видов управляющих сигналов для электроприводов постоянного тока: цифровых, импульсных и релейных. При этом усиление и формирование всех видов управляющих сигналов происходит непосредственно в цифровом усилителе мощности, но уже в области высоких напряжений и сильных токов, много больших уровней шумов и помех.
Предварительное усиление происходит в ключевом режиме с использованием сильноточных многоразрядных ключей, выходы которых подключены к разрядным резисторам с двоичным весом, которые совместно с масштабным резистором образуют дискретно управляемый делитель напряжения.
Предлагаемая кибернетическая цифровая система иллюстрируется структурными схемами, представленными на фиг.1-2.
На фиг.1 представлена структурная схема кибернетической микропроцессорной цифровой системы.
На фиг.2 представлена функционально-структурная схема цифрового усилителя мощности.
Кибернетическая микропроцессорная цифровая система работает следующим образом.
Цифровое управляющее устройство (ЦУУ) (фиг.1) с периодом квантования по времени Т производит сбор цифровой информации с пульта цифрового управления (ПЦУ) и цифровых датчиков угла (ЦДУ), вычисляет рассогласования и в соответствии с полученными данными формирует управляющие цифровые сигналы Ni, Nj, Nn.
Сформированные управляющие цифровые сигналы поступают с временным разделением в соответствующие цифровые усилители мощности (УМЦi, УМЦj, УМЦn) по цифровому интерфейсу в последовательном или параллельном коде, где кратковременно фиксируются на входном регистре RG1 (фиг.2) и затем на время периода Т - в одном из буферных регистров RG2 или RG3 в зависимости от знака сигнала, поступающего, по Вх.2 или Вх.3.
Далее цифровые сигналы с буферных регистров поступают в параллельном коде на соответствующие две группы микросхемных ключей типа 169АА1, к выходам которых подсоединены резисторы с двоичным весом, образующие совместно с масштабными резисторами R0 и R10 два делителя напряжения.
Выходные напряжения делителей поступают на базы транзисторов VT1 и VT2 моста, в диагональ которого подключен электропривод постоянного тока. Оригинальность транзисторного моста, в отличие от известных, заключается в том, что два транзистора VT1 и VT2 включены в режим эмиттерного повторителя, а два других транзистора VT3 и VT4 работают в ключевом режиме. Плечи моста работают так, что одна пара транзисторов, например VT1 и VT4, находится в активном режиме, т.е. в открытом состоянии, и проводят ток через электропривод, а вторая пара транзисторов VT2 и VT3 находятся в пассивном состоянии, т.е. закрыты.
При смене полярности управляющего цифрового сигнала транзисторы меняют свое состояние на противоположное, и при этом происходит реверс электропривода. Благодаря такой схеме цифрового усилителя мощности транзисторный мост запитывается однополярным напряжением вместо двухполярного. При этом характер управления электроприводом относится к квазилинейному виду.
При импульсном управлении электроприводом процесс происходит аналогично вышеописанному, при этом амплитудная модуляция осуществляется изменением величины управляющего цифрового сигнала при постоянной длительности его воздействия τ<Т.
Длительность воздействия цифрового сигнала элементарно реализуется микропроцессором путем замены по окончании τ на нулевой цифровой сигнал.
Импульсное управление с широтно-импульсной модуляцией реализуется при постоянной величине цифрового сигнала, а длительность его воздействия регулируется варьированием величины τ программными средствами.
Релейный режим может быть модифицирован путем ступенчатого выбора цифровых сигналов при разгоне и остановке электродвигателя.
Таким образом, из изложенного следует, что режимы управления реализуются весьма несложными программными средствами микропроцессора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| МИКРОПРОЦЕССОРНОЕ РЕЛЕЙНОЕ УСТРОЙСТВО ИМПУЛЬСНОЙ СИГНАЛИЗАЦИИ | 2000 |
|
RU2195707C2 |
| КОНТРОЛЛЕР УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ С ПОМОЩЬЮ ВНЕШНИХ ЭЛЕКТРОННЫХ И МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2021 |
|
RU2772927C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ | 2000 |
|
RU2173924C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2222083C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТОКА В ФАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1991 |
|
RU2022442C1 |
| МИКРОПРОЦЕССОРНОЕ МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО РЕЛЕ ЧАСТОТЫ | 2000 |
|
RU2171475C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |

Изобретение относится к технической кибернетике для атоматического управления объектами с электроприводами постоянного тока, преимущественно в оптико-электронных обзорных системах. Технический результат заключается в повышении точности управления. Система содержит (фиг.1) цифровое управляющее устройство (ЦУУ) с процессором, пульт цифрового управления (ПЦУ), объект управления (ОУ) с электродвигателями постоянного тока (ДПТ), цифровые датчики угла (не показано), цифровой пульт управления (ЦПУ) и цифровой усилитель мощности (ЦУМ). ЦУУ с периодом кванотования Т производит сбор цифровой информации с ПЦУ и ЦДУ, вычисляет рассогласования и формирует управляющие цифровые сигналы, поступающие по цифровому интерфейсу в ЦУМ. 2 ил.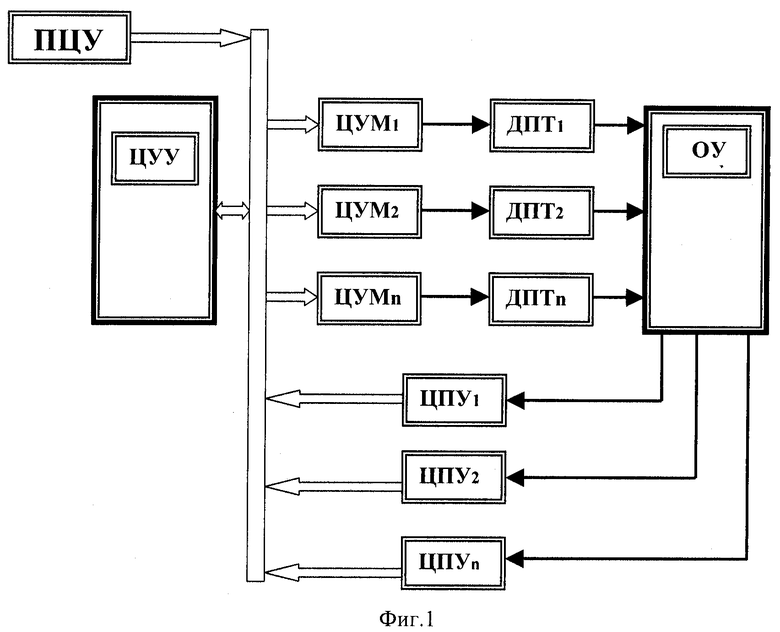
Кибернетическая микропроцессорная цифровая система автоматического управления, содержащая цифровое управляющее устройство с процессором, которое производит сбор цифровой информации с цифрового пульта управления и цифровых датчиков угла, формируя управляющие цифровые сигналы, которые поступают по цифровому интерфейсу в соответствующие цифровые усилители мощности, при этом цифровой усилитель мощности содержит входной регистр, где управляющие цифровые сигналы кратковременно фиксируются, выводы которого подключены к двум буферным регистрам, в одном из которых управляющие цифровые сигналы кратковременно фиксируются в зависимости от знака сигнала, каждый из буферных регистров подключен к группам ключей соответствующих усилителей-преобразователей уровня напряжения с нагрузочными разрядными резисторами с двоичным весом, образующие совместно с суммирующими масштабными резисторами, подключенными к высокому потенциалу однополярного источника питания транзисторного моста, два делителя напряжения, выходы которых подключены к транзисторному мосту, в диагональ которого включен электродвигатель постоянного тока объекта управления, при этом два транзистора моста включены в режим эмиттерного повторителя, а два других транзистора моста работают в ключевом режиме, причем реверс электродвигателя постоянного тока происходит при смене полярности управляющего цифрового сигнала.
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| US 5631605 A, 20.05.1997 | |||
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |

