Изобретение относится к электротехнике и может быть использовано в системах автоматического управления для регулирования частоты вращения электродвигателя постоянного тока.
Известно устройство, содержащее последовательно соединенные электродвигатель постоянного тока, усилитель мощности, триггер, последовательно соединенные задающий генератор, логический элемент И, управляемый делитель частоты, установочные входы которого соединены с выходами блока совпадения, реверсивный счетчик, датчик скорости, причем выход триггера соединен с вторым входом логического элемента И, два регистра, преобразователь код - число импульсов, два дешифратора, два логических элемента ИЛИ, второй триггер, делитель частоты, три логических элемента И, формирователь, элемент задержки и последовательно соединенные между собой элемент синхронизации, пятый логический элемент И, третий триггер, шестой логический элемент И, второй делитель частоты и третий логический элемент ИЛИ, выход которого подключен к второму входу третьего триггера и к второму входу второго делителя частоты, причем входные шины электропривода соединены с входами преобразователя код - число импульсов, с входами первого дешифратора и первого регистра, выходы которого подключены к установочным входам реверсивного счетчика, выходы реверсивного счетчика соединены с входами второго регистра и второго дешифратора, выход которого подключен к входу первого регистра и к второму входу третьего логического элемента ИЛИ, выходы второго регистра подключены к входам блока совпадения, второй вход которого соединен с выходами элемента задержки, второй выход задающего генератора подключен к первому входу элемента синхронизации, третий выход задающего генератора соединен с вторым входом шестого логического элемента И, к первому выходу задающего генератора подключен вход первого делителя частоты, выход которого соединен с входом первого логического элемента ИЛИ, второй вход первого элемента ИЛИ соединен с выходом второго логического элемента И и с третьим входом третьего логического элемента ИЛИ, выход первого логического элемента ИЛИ подключен к входу первого триггера, второй вход которого соединен с выходом второго элемента ИЛИ, выход управляемого делителя частоты соединен с входом второго элемента ИЛИ, с входом элемента задержки и с входом третьего логического элемента И, второй вход которого подключен к инверсному выходу третьего триггера, а выход - к входу второго регистра и к входу второго триггера, выход второго триггера соединен с вторым входом пятого логического элемента И, выход датчика скорости подключен к второму входу элемента синхронизации и к входу формирователя, выход которого соединен с входом второго логического элемента И, первый вход четвертого логического элемента И подключен к выходу элемента синхронизации, а второй - к выходу третьего триггера, выход четвертого элемента И соединен с вторым входом второго триггера и с входом вычитания реверсивного счетчика, вход сложения которого подключен к выходу преобразователя код - число импульсов, второй вход этого преобразователя соединен с вторым выходом второго делителя частоты, выход первого дешифратора подключен к второму входу второго логического элемента И и к второму входу второго логического элемента ИЛИ [1].
Недостатками известного устройства являются низкая надежность, обусловленная большим количеством элементов схемы, низкая точность, обусловленная тем, что обратная связь замыкается вне задающего устройства, а также отсутствие возможности реверсирования вала электродвигателя.
Наиболее близким по технической сущности к предлагаемому является электропривод, содержащий электродвигатель постоянного тока, импульсный датчик частоты вращения, делитель частоты, блок задания режимов, соединенный через шины адреса, данных, управления и тактовую с блоком измерения частоты и модуляции ширины импульсов, выход которого через усилитель мощности подключен к якорю электродвигателя, а вход соединен с выходом импульсного датчика частоты вращения, где блок измерения частоты и модуляции ширины импульсов выполнен из трех программируемых счетчиков, каждый из которых снабжен тактовым и разрешающим входом и выходом, к тактовым входам первого и второго счетчиков подключена тактовая шина блока задания режимов, а тактовый вход третьего счетчика является входом блока измерения частоты и модуляции ширины импульсов, выход первого счетчика соединен с разрешающим входом второго счетчика и через делитель частоты подключен к разрешающему входу третьего счетчика и к входу "Запрос прерывания" блока задания режимов, выход второго счетчика является выходом блока измерения частоты и модуляции ширины импульсов [2].
В этом устройстве при измерении текущей частоты вращения вала электродвигателя используется метод непосредственной оценки - с помощью подсчета числа импульсов датчика за фиксированный интервал времени измеряется среднее значение скорости, что влечет снижение точности и разрешающей способности в диапазоне малых скоростей. В электроприводе также отсутствует возможность реверсирования вала электродвигателя.
Задача изобретения состоит в повышении точности регулирования частоты вращения вала электродвигателя и расширении функциональных возможностей электропривода.
Поставленная задача может быть решена за счет того, что в известном микропроцессорном электроприводе, содержащем электродвигатель постоянного тока, импульсный датчик частоты вращения, блок задания режимов, соединенный через шину адреса, шину данных, шину управления и тактовую шину с блоком измерения частоты и модуляции ширины импульсов, выходы которого через усилитель мощности подключены к якорю электродвигателя, а вход соединен с выходом импульсного датчика частоты вращения, блок измерения частоты и модуляции ширины импульсов включает три программируемых счетчика, каждый из которых снабжен тактовым и разрешающим входами и выходом, к тактовым входам первого и второго программируемых счетчиков подключена тактовая шина, в блок измерения частоты и модуляции ширины импульсов дополнительно введены три программируемых счетчика, каждый из которых снабжен тактовым и разрешающим входами и выходом, D-триггер, два логических элемента И, пять логических элементов НЕ, при этом к тактовым входам третьего, четвертого и пятого программируемых счетчиков подключена тактовая шина, усилитель мощности выполнен в виде мостовой схемы из четырех ключей, выходы первого и третьего программируемых счетчиков являются выходами блока измерения частоты и модуляции ширины импульсов и соединены с первым и четвертым ключами усилителя мощности, а также с входами первого и второго логических элементов НЕ, выходы которых также являются выходами блока измерения частоты и модуляции ширины импульсов и подключены ко второму и третьему ключам усилителя мощности, выход второго программируемого счетчика соединен с синхронизирующим входом D-триггера, инверсный выход которого соединен с его информационным входом, а также с разрешающим входом третьего программируемого счетчика, прямой выход D-триггера соединен с разрешающим входом первого программируемого счетчика, тактовый вход шестого программируемого счетчика является входом блока измерения частоты и модуляции ширины импульса, разрешающие входы второго и пятого программируемых счетчиков соединены с высоким потенциалом (логической "1"), разрешающие входы четвертого и шестого программируемых счетчиков соединены с выходами первого и второго логических элементов И, входы первого логического элемента И соединены с выходом пятого программируемого счетчика и с выходом шестого программируемого счетчика, входы второго элемента И соединены с выходом пятого программируемого счетчика и с выходом третьего логического элемента НЕ, вход которого соединен с выходом четвертого программируемого счетчика и с входом "Запрос прерывания 1" блока задания режимов, выход пятого программируемого счетчика соединен с четвертым логическим элементом НЕ, подключенным к входу "Запрос прерывания 0" блока задания режимов, выход шестого программируемого счетчика соединен с пятым логическим элементом НЕ, подключенным к входу "Запрос прерывания 2" блока задания режимов.
Сущность изобретения поясняется чертежом, где на фиг. 1 изображена функциональная схема микропроцессорного электропривода; на фиг.2 - временные диаграммы, поясняющие работу программируемого таймера 7; на фиг.3 - временные диаграммы, поясняющие работу программируемого таймера 6; на фиг.4 - алгоритм подпрограммы обслуживания запроса на прерывание INT2; на фиг.5 - алгоритм подпрограммы обслуживания запроса на прерывание INT1.
Микропроцессорный электропривод содержит электродвигатель 1 постоянного тока, импульсный датчик 2 частоты вращения, блок 3 задания режимов, соединенный через шину управления, шину адреса, шину данных и тактовую шину с блоком 4 измерения частоты и модуляции ширины импульсов, выходы которого через блок ключевых усилителей мощности 5 соединены с якорем электродвигателя 1, а вход - с импульсным датчиком 2 частоты вращения. Блок 4 измерения частоты вращения и модуляции ширины импульсов содержит два программируемых таймера 6 и 7, выполненных на базе программируемых счетчиков 8-13, один D-триггер 14, два логических элемента И 15 и 16, пять логических элементов НЕ 17-21. Тактовые входы программируемых счетчиков 8-12 соединены с тактовой шиной блока 3. Тактовый вход программируемого счетчика 13 является входом блока 4. Выходы программируемых счетчиков 8 и 10 являются выходами блока 4 и соединены с первым 22 и четвертым 23 ключами блока ключевых усилителей мощности 5, а также с входами первого 17 и второго 18 логических элементов НЕ, выходы которых также являются выходами блока 4, и подключены ко второму 24 и третьему 25 ключам блока 5. Выход программируемого счетчика 9 соединен с синхронизирующим входом D-триггера 14, его инверсный выход соединен с информационным входом, а также с разрешающим входом счетчика 10, прямой выход триггера 14 соединен с разрешающим входом программируемого счетчика 8, а разрешающие входы программируемых счетчиков 9 и 12 соединены с логической "1", разрешающие входы программируемых счетчиков 11 и 13 соединены с выходами первого 15 и второго 16 логических элементов И. Входы первого логического элемента И 15 соединены с выходами программируемых счетчиков 12 и 13, входы второго логического элемента И 16 соединены с выходом программируемого счетчика 12 и через элемент НЕ 19 - с выходом программируемого счетчика 11. Выход программируемого счетчика 12 через логический элемент НЕ 20 подключен к входу "Запрос прерывания 0", выход программируемого счетчика 11 подключен к входу "Запрос прерывания 1", выход программируемого счетчика 13 через логический элемент НЕ 21 подключен к входу "Запрос прерывания 2" блока задания режимов 3.
Микропроцессорный электропривод работает следующим образом.
При инициализации системы блок 3 выполняет следующие операции. Программируемый счетчик 9 (канал 1 программируемого таймера 6) программируется в режим 2 (генератор тактовых сигналов) и в него записывается число N(TКОМ), определяемое по формуле:
N(TКОМ) = FТ•TКОМ,
где TКОМ - период коммутации электродвигателя, значение которого определяется параметрами электродвигателя, в частности величиной электромагнитной постоянной времени обмотки якоря TЯ, и выбирается исходя из допустимой величины пульсаций тока в обмотке якоря, Гц.
Программируемые счетчики 8 и 10 (каналов 0 и 2 программируемого таймера 6) программируются в режим 1 (программируемый ждущий мультивибратор), а значение управляющего кода N, записываемого в программируемые счетчики, определяет длительность паузы между управляющими импульсами, оно зависит от направления вращения вала электродвигателя и описывается соотношением:
где N(TП) - значение кода, определяющего длительность паузы;
N(Tр) - значение кода, определяющего длительность регулирующего воздействия на одном периоде коммутации электродвигателя TКОМ;
UМ - модулированное напряжение определенной полярности, подводимое к якорю электродвигателя.
Программируемый счетчик 11 (канал 0 программируемого таймера 7) программируется в режим 1 (программируемый ждущий мультивибратор) и в него записывается число N(TМАКС), определяемое по формуле:
N(TМАКС) = TМАКС•FТ,
где TМАКС - максимальный интервал времени измерения, после истечения которого текущая скорость полагается равной нулю, выбирается в соответствии с минимальной контролируемой величиной частоты вращения, с.
Программируемый счетчик 12 (канал 1 программируемого таймера 7) программируется в режим 2 (генератор тактовых сигналов) и в него записывается число N(TД), определяемое по формуле:
N(TД) = FТ•TД,
где FТ - величина тактовой частоты блока 3, Гц;
TД - период дискретизации системы, с.
Программируемый счетчик 13 (канал 2 программируемого таймера 7) программируется в режим 2 (генератор тактовых сигналов) и в него записывается число, соответствующее фиксированному количеству импульсов датчика частоты вращения 2, по истечении которых на вход "Запрос прерывания 2" блока 3 поступает соответствующий сигнал для считывания остатка программируемого счетчика 11.
Частота вращения вала электродвигателя, при которой осуществляется переход от одного метода измерения к другому, выбирается исходя из требования обеспечения наименьшей погрешности измерений. При достижении граничной скорости под воздействием управляющей программы блока 3 задания режимов происходит переключение блока 4 из одного метода измерений в другой метод измерений, причем при обоих методах измерений режимы работы программируемых счетчиков 11 и 13 (каналов 0 и 2 программируемого таймера 7) остаются постоянными, изменяются лишь значения величин, записываемые в них:
- в программируемый счетчик 11 (канал 0 программируемого таймера 7) записывается число N(TИЗМ), эквивалентное времени измерения TИЗМ количества импульсов датчика частоты вращения 2, определяемое по формуле:
N(TИЗМ) = TИЗМ•FТ,
где TИЗМ - фиксированный интервал времени измерения, с;
- в программируемый счетчик 13 (канал 2 программируемого таймера 7) записывается число, равное максимальной емкости счетчика: 65535d (OFFFFh), которое декрементируется в течение измерительного интервала.
Поскольку режим работы программируемых счетчиков каналов программируемого таймера остается неизменным на протяжении всего времени функционирования электропривода (изменяется только величина управляющего кода), то их установка в соответствующий режим производится только при инициализации.
Частота вращения при работе в диапазоне низких скоростей подсчитывается по формуле:
n = ST/N(Tk),
где n - частота вращения вала электродвигателя, об/мин;
N(Tk) - количество подсчитанных эталонных импульсов длительностью 1/FТ каждый за время регистрации k - импульсов датчика частоты вращения;
ST - постоянная метода измерений, об/мин, определяется по формуле:
ST = 60•k•FТ/z,
k - количество импульсов датчика частоты вращения, сравниваемых с эталоном;
FТ - величина тактовой частоты блока 3, определяющая длительность эталонных импульсов, Гц;
z - число импульсов датчика частоты вращения на один оборот вала электродвигателя, имп/об.
Количество подсчитанных эталонных импульсов, соответствующих фиксированному числу импульсов датчика частоты вращения, определяется по формуле:
N(Tk) = N(TМАКС) - N(RD0),
где N(RD0) - величина, считанная блоком задания режимов 3 из регистра программируемого счетчика 11 (канал 0 программируемого таймера 7) по сигналу "Запрос прерывания 2" (INT2).
Частота вращения при работе в диапазоне высоких скоростей подсчитывается по формуле:
n = SM•m,
где n - частота вращения вала электродвигателя, об/мин;
m - число подсчитанных импульсов датчика частоты вращения;
SM - постоянная метода измерений, об/мин, определяется по формуле:
SM = 60/TИЗМ•z,
TИЗМ - время измерения, с;
z - число импульсов на один оборот вала электродвигателя, имп/об.
Количество подсчитанных импульсов датчика частоты вращения за фиксированный временной интервал TИЗМ определяется по формуле:
m = 65535 - N(RD2),
где N(RD2) - величина, считанная блоком задания режимов 3 из регистра программируемого счетчика 13 (канал 2 программируемого таймера 7) по сигналу "Запрос прерывания 1" (INT1).
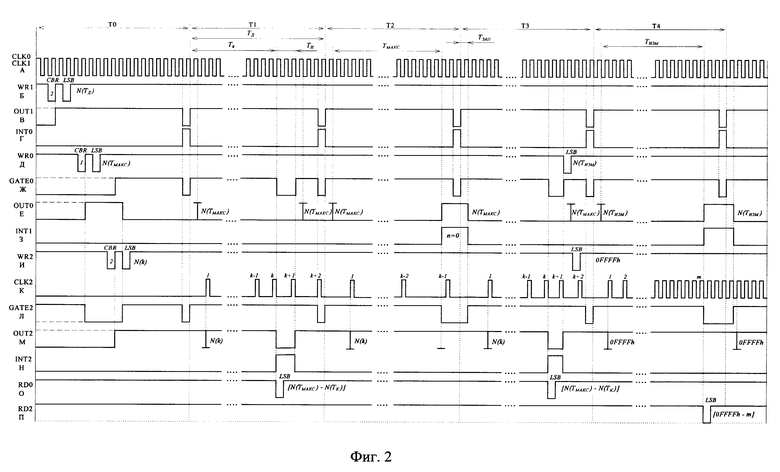
На временной диаграмме работы программируемого таймера 7 (фиг. 2) приняты следующие обозначения:
T0 - временной интервал, соответствующий инициализации системы;
T1, T3 - временные интервалы, соответствующие работе блока 4 в диапазоне низких скоростей;
T2 - участок, соответствующий истечению максимального интервала времени измерения ТМАКС;
T4 - временной интервал, соответствующий работе блока 4 в режиме высоких скоростей;
TД - период дискретизации - участок, величина которого определяет границы измерительных интервалов, осуществляющих выравнивание отсчетов в параллельных счетчиках, может также являться периодом дискретизации всей системы по сигналу "Запрос прерывания 0" (INT0) (фиг. 2Г) при увязке величин: времени измерения ТИЗМ и количества подсчитываемых импульсов k с временем выполнения программы ТПРОГ;
Tk - время регистрации k импульсов датчика частоты вращения;
TИ - время от момента регистрации k-го импульса до прихода k+1-го импульса или время между двумя соседними импульсами датчика частоты вращения 2;
TМАКС - максимальный интервал времени измерения, после истечения которого текущая скорость полагается равной нулю, Tk < TМАКС < TД;
TЗАП - время запуска отсчета или время с момента перехода разрешающего сигнала GATE с низкого уровня на высокий до момента начала отсчета, равно периоду тактовой частоты 1/FТ;
TИЗМ - фиксированный интервал времени измерения, TИ < TИЗМ < TД;
WR - запись управляющего байта в регистр управляющего байта или значения программируемого счетчика в регистр программируемого счетчика;
RD - чтение значения программируемого счетчика из регистра программируемого счетчика;
CBR - запись управляющего байта в регистр управляющего байта;
LSB - запись/чтение последнего байта программируемого счетчика в / из регистр(а) программируемого счетчика соответствующего канала программируемого таймера.
На временном интервале Т0 происходит стандартная загрузка управляющих байтов и значений программируемых счетчиков для каждого из каналов.
Временной интервал Т1 начинается по переднему фронту импульса сигнала OUT 1 с выхода канала 1 программируемого таймера 7 (фиг. 2В) и характеризует его работу в диапазоне низких скоростей.
Импульсы датчика 2, частота следования которых Fос пропорциональна частоте вращения, поступают на тактовый вход CLK 2 канала 2 программируемого таймера 7 (фиг. 2К), на разрешающий вход GATE 2 (фиг.2Л) которого подаются импульсы с частотой следования, определяемой логическим выражением:
где черта сверху означает знак инверсии, в данном случае обеспечивается логическим элементом НЕ 19 (фиг. 1);
знак (∧) - конъюнкция, в данном случае обеспечивается логическим элементом И 16 (фиг. 1);
OUT 0 - сигнал с выхода канала 0 программируемого таймера 7 (фиг.2Е).
По переднему фронту сигнала GATE 2 загружается начальное значение программируемого счетчика N(k) и запускается счет импульсов датчика 2.
За время подсчета k импульсов в программируемом счетчике канала 0 программируемого таймера 7 происходит вычитание каждого импульса, подаваемого на тактовый вход CLK 0 (фиг. 2А), на разрешающий вход GATE 0 (фиг. 2Ж) которого подаются импульсы с частотой следования, определяемой логическим выражением:
где OUT 2 - сигнал с выхода канала 2 программируемого таймера 7 (фиг. 2М);
конъюнкция в данном случае обеспечивается логическим элементом И 15 (фиг. 1).
При регистрации k-го импульса сигнал OUT 2 устанавливается в низкий уровень, формируя передний фронт сигнала INT 2 (фиг. 2Н), поступающего на вход "Запрос прерывания 2" блока 3, а также установку сигнала GATE 0 в низкий уровень, запрещающий счет в канале 0 на время TИ, по окончании которого переводится в высокий уровень, что вызывает изменение сигнала GATE 0 с низкого уровня на высокий и загрузку начального значения N(TМАКС) с последующим началом отсчета при одновременной автоматической загрузке начального значения N(k) и старте отсчета импульсов датчика 2. Каждый раз после регистрации k-го импульса возникает прерывание INT 2, по которому, если оно не маскировано, считывается остаток программируемого счетчика канала 0 программируемого таймера 7 (фиг. 2О). Цикл работы повторяется до окончания интервала TД.
Временной интервал T2 характеризует работу программируемого таймера 7 в случае уменьшения частоты вращения за пределы нижней контролируемой границы. Интервал может начинаться как по переднему фронту импульса сигнала OUT 1 с выхода канала 1 программируемого таймера 7, так и автоматически, как составляющая цикла временного интервала T1.
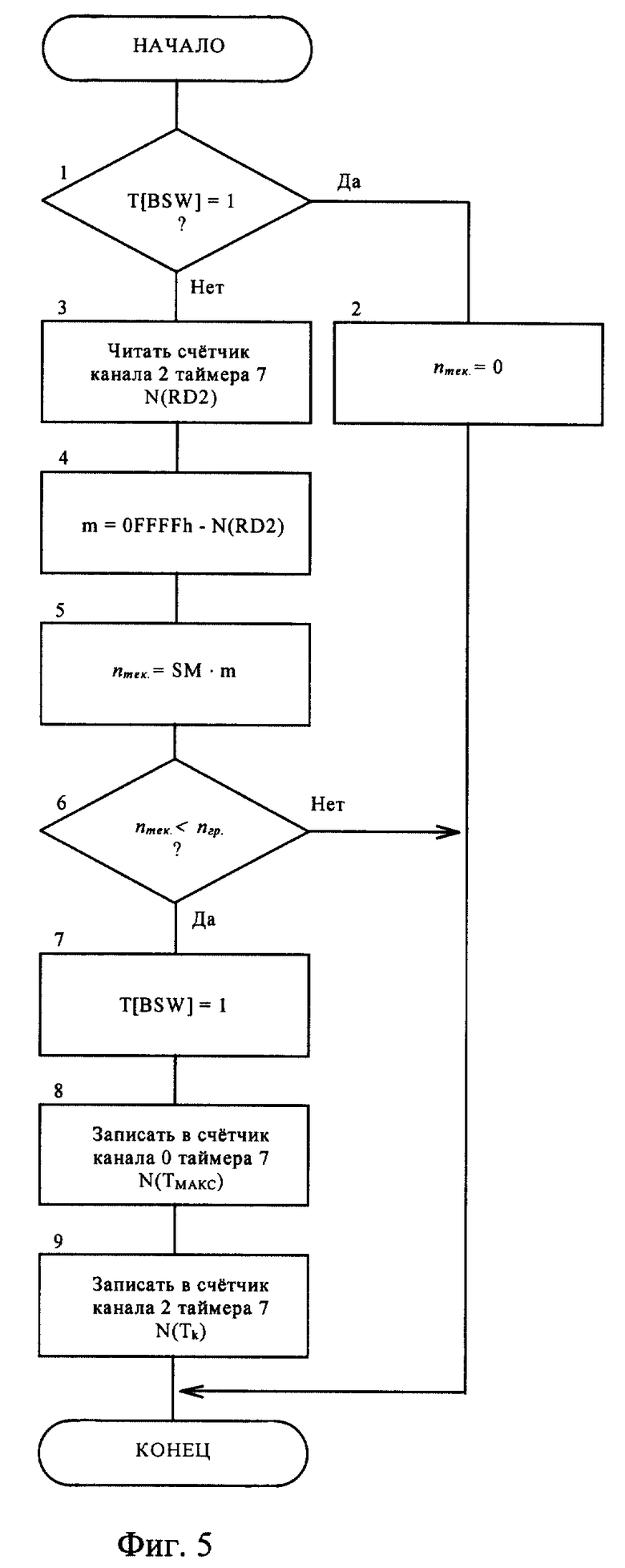
После окончания максимального интервала времени измерения ТМАКС (что возможно, только если на момент завершения ТМАКС в программируемом счетчике канала 2 будет зарегистрировано количество импульсов датчика 2 меньше, чем k) сигнал OUT0 устанавливается в высокий уровень, формируя передний фронт импульса INT1 (фиг. 2З), поступающего на вход "Запрос прерывания 1" блока 3, а также установку сигнала GATE 2 в низкий уровень, запрещающий счет в канале 2. Прерывание INT1, возникшее в диапазоне низких скоростей, определяет значение текущей скорости как нулевое (фиг.5). До окончания текущего периода дискретизации измерений скорости не производится.
Временной интервал T3 начинается по переднему фронту импульса сигнала OUT 1, аналогично интервалу T1, и характеризует работу программируемого таймера 7 в случае увеличения частоты вращения вала электродвигателя до граничного значения диапазона низких скоростей, а также показывает выход из состояния определения нулевой скорости.
Поскольку уровень сигнала OUT 0 - высокий, то до поступления переднего фронта разрешающего сигнала GATE 0, уровень сигнала GATE 2 - низкий, что запрещает счет и удерживает высокий уровень сигнала OUT 2. Передний фронт сигнала OUT 1 загружает начальное значение в счетчик канала 1 и сигнал OUT 0 устанавливается в низкий уровень, что изменяет состояние сигнала GATE 2 с низкого уровня на высокий. По переднему фронту сигнала GATE 2 загружается начальное значение величины N(k) и начинается отсчет импульсов датчика 2 частоты вращения (фиг. 1). После поступления сигнала "Запрос прерывания 2" (INT 2), в случае если значение текущей скорости превышает граничное, в программируемые счетчики каналов записываются величины, соответствующие работе программируемого таймера 7 в диапазоне высоких скоростей.
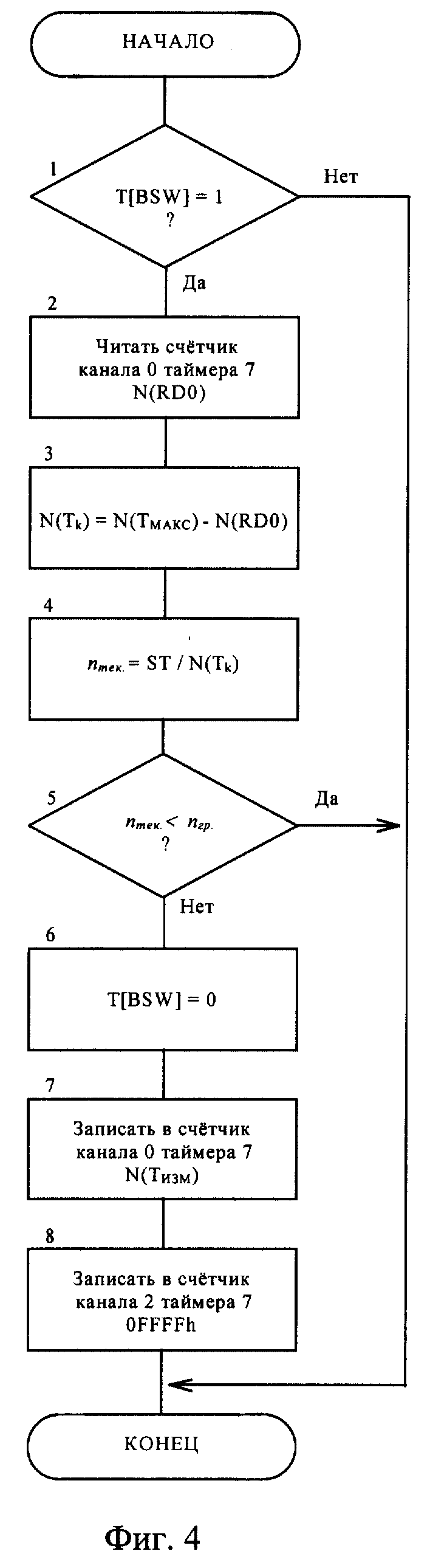
При приближении частоты вращения к верхней границе низких скоростей возникает значительная разность величин Tk и TД, поэтому на одном периоде может появиться несколько циклов измерений при вероятности уменьшения ширины импульса TИ до величины, исключающей возможность записи в счетчики новых параметров, следовательно первый измерительный интервал после переключения может не соответствовать новому методу измерений, что вызовет возникновение сигнала "Запрос прерывания 2" (INT 2), но в диапазоне высоких скоростей происходит выход из соответствующего алгоритма (фиг.4).
Временной интервал T4 характеризует работу программируемого таймера 7 в диапазоне высоких скоростей. Интервал может начинаться как по переднему фронту импульса сигнала OUT 1 с выхода канала 1 программируемого таймера 7, так и автоматически, как составляющая цикла временного интервала T3.
За время действия измерительного интервала TИЗМ в программируемом счетчике канала 2 происходит вычитание каждого импульса, подаваемого на тактовый вход CLK 2 (фиг. 2К) с выхода датчика 2 частоты вращения (фиг. 1). После окончания времени измерения сигнал OUT 0 (фиг. 2E) переходит в высокий уровень, устанавливая сигнал GATE 2 (фиг. 2Л) в низкий уровень, запрещающий счет в канале 2. Сигнал INT1, поступающий на вход "Запрос прерывания 1" (INT 1), в диапазоне высоких скоростей вызывает соответствующую подпрограмму определения текущей частоты вращения. До окончания текущего периода дискретизации измерений скорости не производится.
Каждый раз после окончания измерительного интервала TИЗМ возникает прерывание INT 1, по которому, если оно не маскировано, считывается остаток программируемого счетчика канала 2 программируемого таймера 7 (фиг.2П). Цикл работы повторяется со следующего такта дискретизации, при этом процесс запуска параллельных счетчиков аналогичен началу временного интервала T3. Ширина импульса, определяемого разностью величин TД и TИЗМ, не должна исключать возможности чтения текущей скорости и записи необходимых параметров при переходе в диапазон низких скоростей.
Таким образом, на основании точного определения текущей скорости и заданной информации о требуемой ее величине вычисляется необходимое управляющее воздействие, алгоритм которого может быть реализован с применением известных законов автоматического регулирования.
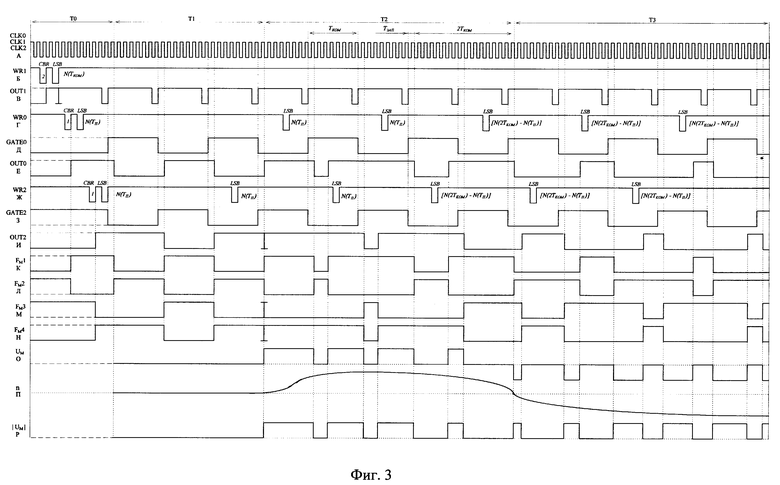
На временной диаграмме работы программируемого таймера 6 (фиг. 3) приняты следующие обозначения:
T0 - временной интервал, соответствующий инициализации системы;
T1 - временной интервал, соответствующий нулевой скорости;
T2 - временной интервал, соответствующий вращению вала электродвигателя по часовой стрелке;
T3 - временной интервал, соответствующий вращению вала электродвигателя против часовой стрелки;
TЗАП - время запуска отсчета или время с момента перехода разрешающего сигнала GATE с низкого уровня на высокий до момента начала отсчета, равно периоду тактовой частоты 1/FТ;
FМ1 - FМ4 - выходные сигналы блока 4, обеспечивающие переключение ключевых усилителей мощности 22 - 25 блока 5 в соответствии с поочередным законом коммутации (фиг.3К-Н);
UМ - выходной сигнал блока 5, поступающий в виде модулированного напряжения на якорь электродвигателя 1 (фиг.3О);
|Uм| - абсолютная величина напряжения на якоре электродвигателя 1 (фиг. 3Р);
n - частота вращения вала электродвигателя (фиг.3П);
На временном интервале T0 происходит стандартная загрузка управляющих байтов и значений программируемых счетчиков для каждого из каналов.
Временной интервал T1 показывает формирование нулевой скорости путем записи в программируемые счетчики каналов 0 и 2 таймера 6 кода N, равного коду N(TКОМ), аналогично получаем максимальную скорость, записав в счетчики нулевой код.
Запись управляющих кодов, определяющих продолжительность импульсов на выходах каналов 0 и 2 программируемого таймера 6 (фиг.3Г, Ж), может производиться во время счета, поскольку не приводит к изменению их текущих значений. Счет с нового значения в каждом из каналов начинается только при изменении состояния сигнала GATE с низкого уровня на высокий.
Изменение частоты коммутации якоря электродвигателя осуществляется записью соответствующего кода в канал 1 программируемого таймера 6 (фиг. 3Б).
Регулирование напряжения, подводимого к якорю электродвигателя, осуществляется импульсным методом с использованием поочередного закона коммутации, для реализации которого D-триггер 14 (фиг.1) формирует две последовательности импульсов, подаваемых на входы GATE 0, GATE 2 блока 6 (фиг. 1), сдвинутые относительно друг друга на угол π/2. На синхронизирующий вход D-триггера 14 с выхода OUT 1 (фиг.3В) блока 6 (фиг.1) поступают импульсы с частотой коммутации FКОМ. D-триггер 14 (фиг.1) включен таким образом, что при поступлении на его синхронизирующий вход каждого очередного сигнала он переходит в противоположное состояние, то есть работает как T-триггер, причем его прямой выход соединен со входом GATE 0, а инверсный - со входом GATE 2 блока 6 (фиг. 1). По запускающим импульсам GATE 0 (фиг.3Д) и GATE 2 (фиг. 3З) на выходах OUT 0 (фиг.3Е) и OUT 2 (фиг.3И) формируется низкий уровень сигнала длительностью, определяемой кодом задания N.
Ключи 22 и 24 (как и ключи 23 и 25) блока 5 работают в противофазе, что обеспечивается двумя логическими элементами НЕ - 17 и 18 (фиг.1). В результате на выходе блока 4 получаем следующие управляющие сигналы:
В алгоритме (фиг. 4, 5) приняты следующие обозначения:
nтех - текущая частота вращения вала электродвигателя;
nгр - граничная скорость переключения диапазонов работы электропривода;
T[BSW] - однобитовый переключатель слова состояния электропривода, определяющий текущий диапазон работы в соответствии с соотношением:
Таким образом, устройство позволяет повысить точность регулирования частоты вращения вала электродвигателя за счет повышения точности измерений скорости вращения вала электродвигателя, что обеспечивается переключением блока измерения частоты и модуляции ширины импульсов из режима непосредственной оценки в режим сравнения с мерой при достижении граничного значения угловой скорости, а также расширить функциональные возможности электропривода за счет введения реверсирования вала электродвигателя и может быть использовано в различных электроприводах с различными типами электродвигателей постоянного тока.
Источники информации, принятые во внимание:
1. Авторское свидетельство СССР N 1003282, М. кл. H 02 P 5/06.
2. Авторское свидетельство СССР N 1607068, М. кл. H 02 P 5/06.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости вращения | 1984 |
|
SU1262385A1 |
| Устройство для измерения скольжения | 1988 |
|
SU1658098A1 |
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ И СОДЕРЖАНИЯ ПЧЕЛИНЫХ СЕМЕЙ | 1995 |
|
RU2096952C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ СЛУЧАЙНОГО ПРОЦЕССА | 2000 |
|
RU2174706C1 |
| МНОГОКАНАЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 1999 |
|
RU2177637C2 |
| ПАРАЛЛЕЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 1999 |
|
RU2174705C2 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 2000 |
|
RU2182358C2 |
| Устройство для измерения скольжения | 1988 |
|
SU1615617A1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 2000 |
|
RU2182724C2 |
Изобретение относится к электротехнике и может быть использовано в системах автоматического управления для регулирования частоты вращения электродвигателя постоянного тока. Техническим результатом является повышение точности регулирования частоты вращения вала электродвигателя и расширение функциональных возможностей за счет обеспечения реверсирования вала электропривода. Указанный результат достигается тем, что микропроцессорный электропривод содержит электродвигатель постоянного тока, импульсный датчик частоты вращения, блок задания режимов, шины адреса, данных, управления и тактовую, блок измерения частоты и модуляции ширины импульсов. 5 ил.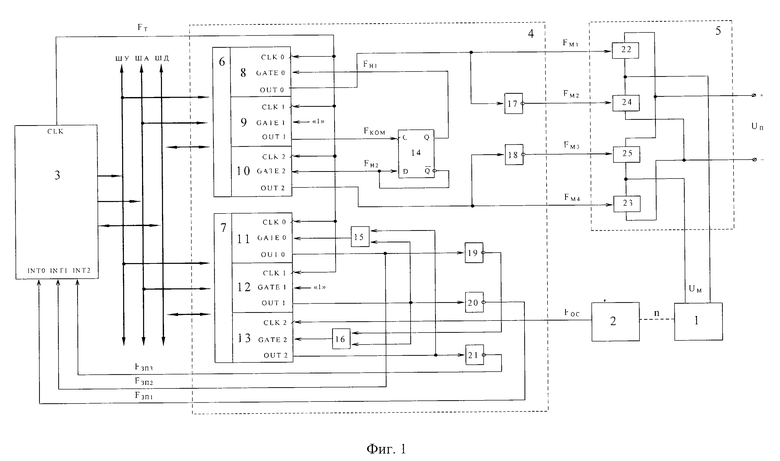
Микропроцессорный электропривод, содержащий электродвигатель постоянного тока, импульсный датчик частоты вращения, блок задания режимов, соединенный через шину адреса, шину данных, шину управления и тактовую шину с блоком измерения частоты и модуляции ширины импульсов, выходы которого через усилитель мощности подключены к якорю электродвигателя, а вход соединен с выходом импульсного датчика частоты вращения, блок измерения частоты и модуляции ширины импульсов включает три программируемых счетчика, каждый из которых снабжен тактовым и разрешающим входами и выходом, к тактовым входам первого и второго программируемых счетчиков подключена тактовая шина, отличающийся тем, что в блок измерения частоты и модуляции ширины импульсов дополнительно введены три программируемых счетчика, каждый из которых снабжен тактовым и разрешающим входами и выходом, D-триггер, два логических элемента И, пять логических элементов НЕ, при этом к тактовым входам третьего, четвертого и пятого программируемых счетчиков подключена тактовая шина, усилитель мощности выполнен в виде мостовой схемы из четырех ключей, выходы первого и третьего программируемых счетчиков являются выходами блока измерения частоты и модуляции ширины импульсов и соединены с первым и четвертым ключами усилителя мощности, а также с входами первого и второго логических элементов НЕ, выходы которых также являются выходами блока измерения частоты и модуляции ширины импульсов и подключены ко второму и третьему ключам усилителя мощности, выход второго программируемого счетчика соединен с синхронизирующим входом D-триггера, инверсный выход которого соединен с его информационным входом, а также с разрешающим входом третьего программируемого счетчика, прямой выход D-триггера соединен с разрешающим входом первого программируемого счетчика, тактовый вход шестого программируемого счетчика является входом блока измерения частоты и модуляции ширины импульсов, разрешающие входы второго и пятого программируемых счетчиков соединены с высоким потенциалом (логической "1"), разрешающие входы четвертого и шестого программируемых счетчиков соединены с выходами первого и второго логических элементов И, входы первого логического элемента И соединены с выходом пятого программируемого счетчика и с выходом шестого программируемого счетчика, входы второго элемента И соединены с выходом пятого программируемого счетчика и с выходом третьего логического элемента НЕ, вход которого соединен с выходом четвертого программируемого счетчика, и с входом "Запрос прерывания 1" блока задания режимов, выход пятого программируемого счетчика соединен с четвертым логическим элементом НЕ, подключенным к входу "Запрос прерывания 0" блока задания режимов, выход шестого программируемого счетчика соединен с пятым логическим элементом НЕ, подключенным к входу "Запрос прерывания 2" блока задания режимов.
| Электропривод | 1988 |
|
SU1607068A1 |
| Цифровой электропривод постоянного тока | 1981 |
|
SU1003282A1 |
| Устройство для управления электроприводом | 1981 |
|
SU1004977A1 |
| RU 2071164 C1, 27.12.96 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
