Изобретение относится к автоматике и может быть использовано для высокоточного автоматического регулирования движения осей оптических телескопов и лидарных станций обнаружения и сопровождения космических объектов.
Известны цифровые электроприводы (патент США №4235072, МПК G04C 3/00, опубл. 25 ноября 1980; авт. св. СССР №1830598, МПК H02K 29/06, опубл. 25 июля 1990; патент (полезная модель) РФ № 2071164, МПК Н02Р 05/06, G05B 11/16, опубл. 27 декабря 1996), содержащие задающее устройство, цифровой регулятор, усилитель мощности, исполнительный двигатель и объект регулирования. Известные устройства характеризуются низкой динамической точностью в связи с низким порядком астатизма систем управления и низкой точностью измерения положения.
Наиболее близким к заявляемому изобретению является цифровой электропривод, выбранный авторами за прототип (авт. св. СССР №1308982, МПК G05B 11/26, опубл. 07 мая 1987), содержащий задающее устройство, регулятор положения, подчиненный ему регулятор скорости, которому подчинен регулятор тока, совмещенный с усилителем мощности, исполнительный двигатель, объект регулирования, механически связанный с ним цифровой датчик положения, формирователь кода положения, кроме того, в состав известного устройства входят блоки формирования и переключения поддиапазонов и сравнения частот, анализатор знака скорости, формирователи импульсов и периода измерения, ключ и счетное устройство, образующие формирователь кода скорости. Известное устройство обладает следующим недостатком: невысокая точность измерения углового положения исполнительной оси привода, обусловленная низкой разрядностью датчика положения, не позволяет приводу работать в диапазоне инфранизких скоростей.
Задача, решаемая заявляемым изобретением, заключается в расширении скоростного диапазона электропривода в сторону инфранизких скоростей за счет повышении точности измерения углового положения исполнительной оси привода с целью управления движением оси телескопа в режимах слежения за естественными космическими объектами.
Поставленная задача решается за счет того, что в цифровой привод, содержащий задающее устройство, последовательно соединенные регулятор положения, регулятор скорости, регулятор тока, второй вход которого соединен с измерительным выходом исполнительного двигателя, вал которого через редуктор механически связан с объектом управления, широтно-импульсный модулятор (ШИМ), выход которого соединен с усилителем мощности, дополнительно введены генератор опорного напряжения, датчики положения грубого и точного отсчетов, преобразователь угол-код, датчик скорости, причем датчики скорости и положения жестко укреплены на исполнительной оси электропривода за редуктором, управляющие входы датчиков положения соединены с выходом генератора опорного напряжения, а выходы датчиков положения соединены с преобразователем угол-код, выход которого соединен со вторым входом регулятора положения, выход датчика скорости соединен со вторым входом регулятора скорости.
Кроме того, преобразователь угол-код может быть выполнен из аналого-цифровых преобразователей (АЦП) грубого и точного отсчетов, трех логических элементов, двух сумматоров, трех регистров, микроконтроллера и CAN интерфейса, при этом преобразователь грубого отсчета первым выходом соединен с первым входом первого сумматора, а вторым выходом - с первым входом второго сумматора, второй вход которого соединен со вторым выходом первого сумматора, преобразователь точного отсчета, первым выходом через упомянутые последовательно соединенные логические элементы соединен со вторым входом первого сумматора, а вторым и третьим выходом соединен через второй и третий регистры соответственно со вторым и третьим входами микроконтроллера, первый вход которого соединен с выходом первого регистра, первый вход которого соединен с первым выходом сумматора, а второй вход - с выходом второго сумматора, выход микроконтроллера через CAN интерфейс соединен со вторым входом регулятора положения.
В основе предлагаемого технического решения лежит применение преобразования следящего типа для сигналов датчика углового положения, реализованное с применением микроконтроллера и цифровых микросборок, не используемых в прототипе.
Заявляемое изобретение поясняется чертежами.
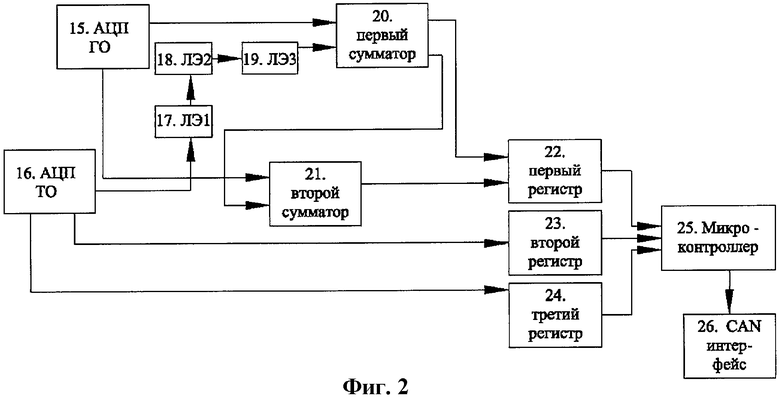
На фиг.1 представлена структурная схема заявляемого электропривода.
На схеме изображены задающее устройство 1, последовательно соединенные регулятор положения 2, регулятор скорости 3, регулятор тока 4, широтно-импульсный модулятор 5, выход которого соединен с усилителем мощности 6, исполнительный двигатель 7, измерительный выход которого через датчик тока 8 соединен с регулятором тока, редуктор 9, жестко укрепленный на исполнительной оси датчик скорости 10, генератор опорного напряжения 11, выход которого соединен с управляющими входами датчиков положения 12 грубого и точного отсчетов, а выходы через преобразователь угол-код 13 соединены с регулятором положения, объект управления - исполнительная ось электропривода 14.
На фиг.2 представлена структурная схема преобразователя угол-код. На схеме изображены АЦП грубого отсчета 15, АЦП точного отсчета 16, первый выход которого через последовательно соединенные логические элементы 17-19 соединен со вторым входом первого сумматора 20, первый вход которого соединен с первым выходом АЦП грубого отсчета 15, второй сумматор 21, входы которого соединены со вторым выходом АЦП грубого отсчета 15 и вторым выходом первого сумматора 20, первый регистр 22, входы которого соединены с выходами первого 20 и второго 21 сумматоров, второй 23 и третий 24 регистры, входы которых соединены со вторым и третьим выходами АЦП точного отсчета 16, и микроконтроллер 25, входы которого соединены с выходами регистров 22, 23, 24, а выход - с входом блока CAN интерфейса 26.
В качестве задающего устройства 1 в электроприводе используется управляющий компьютер, в функции которого входят задание требуемого положения исполнительной оси, задание различных режимов работы, визуализация текущего состояния электропривода. В режиме программного наведения координатная траектория движения хранится в памяти управляющего компьютера и формируется в виде цифрового сигнала задания на входе контура регулирования положения с частотой не менее 1000 Гц.
В качестве регуляторов тока 4, угловой скорости 3 и углового положения 2 используются цифровые пропорционально интегрально дифференциальные (ПИД) регуляторы, реализованные на базе цифрового сигнального процессора TMS320F2808 со встроенным формирователем широтно-модулированных сигналов (ШИМ) 5 управления транзисторными ключами усилителя мощности 6.
Усилитель мощности 6 реализован по мостовой схеме широтно-импульсного преобразователя (ШИП) на транзисторах VT1-VT4 (HEXFET IRFP260N). В диагональ моста подсоединяется якорь исполнительного двигателя постоянного тока 7 типа ДВИ, на который подается ШИМ - напряжение частотой 20 кГц. В качестве драйверов транзисторов (на фиг.1 не показаны) взяты микросхемы IR2127. Сигналы управления транзисторами моста подаются с ШИМ выходов сигнального процессора на драйверы ключей через оптронные развязки (на фиг.1 не показаны) AOD-130.
Датчик тока 8 реализован на основе НХ 05-Р и установлен последовательно с якорной обмоткой двигателя 7. На выходе датчика тока 8 установлен фильтр низкой частоты Салена-Ки и масштабирующий усилитель (на фиг.1 не показаны), реализованные на микросхеме LM258.
В качестве датчика скорости 10 используется тахогенератор постоянного тока с возбуждением от постоянных магнитов ТГП-5, сопряженный с валом двигателя, установленный на выходе понижающего редуктора 9. Сигнал тахогенератора двигателя фильтруется с помощью входных фильтрующих цепей микросхемы AD622 (на фиг.1 не показаны), представляющей собой инструментальный усилитель, используемый для устранения синфазной помехи.
Преобразователь угол-код 13 осуществляет преобразование выходных сигналов 2-фазных датчиков положения 12 грубого (ДУ ГО) и точного отсчетов (ДУ ТО), статоры и роторы которых установлены в согласованные угловые положения, в 22-разрядный параллельный двоичный код. В качестве ДУ ГО используется серийный датчик типа 5БВТ-Д, а в качестве ДУ ТО - специализированный датчик индукционный БК2.329.110. Генератор опорного напряжения 11 реализован на двух трансформаторах ТПП-253-220-400, преобразующих предварительно усиленный гармонический сигнал, поступающий с микроконтроллера 25 ADUC7026BST в напряжения питающие обмотки возбуждения датчиков положения.
АЦП сигналов ДУ ГО 15, осуществляемое входящей гибридной микросборкой 2602ПВ1ВП, обеспечивает формирование 7-разрядного кода грубого отсчета. АЦП сигналов ДУ ТО 16, осуществляемое микросборкой 2602ПВ1АП, обеспечивает формирование 16-разрядного кода точного отсчета. Предварительно выходные напряжения ДУ ТО синхронно уменьшаются по амплитуде с помощью резисторной матрицы типа 301 НР7 гр. 1В и двух операционных усилителей типа 153УД6С (на фиг.2 не показаны).
С помощью логических элементов 17, 18, 19 типа 1526ЛН2 и 1526ЛА7, а также двух сумматоров 20, 21 типа 1526 осуществляется стыковка указанных кодов грубого и точного отсчетов, обеспечивающая формирование 22 логических уровней напряжения. Эти уровни в следящем режиме представляют текущее значение преобразуемого углового положения оси. Сигналы с указанными уровнями поступают на соответствующие входы трех 8-разрядных выходных регистров 22, 23, 24 типа 1533ИР22, на выходах которых образуется требуемый 22-разрядный код.
С помощью логических элементов 1526ЛН2, 1526ЛА7 (на фиг.2 не показаны) и электронного ключа типа 590КН4 (на фиг.2 не показан) реализуется управляемый с внешней стороны алгоритм передачи 22-разрядного выходного кода в микроконтроллер.
Микроконтроллер 25 преобразователя угла ADUC7026BST предназначен для перевода цифрового сигнала положения оси из параллельного кода в последовательный с последующей передачей его по CAN-интерфейсу 26 в цифровой сигнальный процессор.
Заявляемое устройство работает следующим образом: сигнал задания, сформированный задающим устройством 1, поступает на вход трехконтурной подчиненной системы управления, в состав которой в соответствии с фиг.1 входят контур регулирования тока якоря исполнительного двигателя 7, включающий в себя ПИД регулятор тока 4 и датчик тока 8, контур регулирования угловой скорости вращения исполнительной оси электропривода 14, включающий в себя датчик скорости 10 и ПИД регулятор скорости 3 и контур регулирования углового положения исполнительной оси 14, включающий соответственно датчик положения 12, преобразователь угол-код 13 и ПИД регулятор положения 2. Сигнал управления, поступающий с задающего устройства 1 на вход контура регулирования углового положения, сравнивается в контуре регулирования с сигналом, поступающим с аналогового датчика углового положения 12, преобразованного в преобразователе угол-код 13 в 22 разрядный цифровой код. Полученный сигнал ошибки, преобразованный регулятором углового положения 2, является входным по отношению к контуру регулирования скорости, в котором сигнал ошибки по скорости, полученный сравнением входного сигнала контура с сигналом, поступающим с датчика скорости 10, после преобразования его ПИД регулятором скорости 3 поступает на вход контура регулирования тока якоря двигателя 7, осуществляющего аналогичную контурам положения и скорости процедуру. Трехконтурная подчиненная система управления, обеспечивающая регулирование углового положения исполнительной оси привода с астатизмом второго порядка, синтезирует сигнал управления, поступающий через широтно-импульсный модулятор 5 на усилитель мощности 6, формирующий питание исполнительного двигателя 7, который через понижающий редуктор 9 передает указанное задающим устройством движение на исполнительную ось привода 14, соединенную с исполнительным механизмом - осью телескопа. Измерение углового положения исполнительной оси электропривода, проиллюстрированное на фиг.2, состоит в следующем: на исполнительной оси электропривода 14 установлены два абсолютных аналоговых датчика 12 для грубого и точного измерения типа вращающийся трансформатор, на обмотки возбуждения которых подаются сигналы опорного напряжения с генератора 11. После аналого-цифрового преобразования 15, 16 сигналов обоих датчиков в зависимости от величин рассогласования заданного и реального углового положения оси посредством логических элементов 17-19 и сумматоров 20 и 21 на вход первого регистра 22 поступает информация о положении исполнительной оси с соответствующей точностью измерения ГО и ТО. На второй и третий регистры 23, 24 поступает информация с датчика точного отсчета. Полученная с трех регистров последовательность 22 бит, отражающая текущее положение исполнительной оси электропривода, переводится в последовательный код микроконтроллером 25 и передается по CAN интерфейсу 26 для дальнейшего использования в трехконтурной системе управления в качестве сигнала обратной связи по угловому положению исполнительной оси электропривода.
По сравнению с известным устройством предлагаемое устройство обладает расширенным диапазоном регулирования скорости в область инфранизких скоростей, как следствие увеличения точности измерения положения исполнительной оси привода, которое в цифровой системе управления достигается за счет увеличения разрядности измерения положения путем сшивания кодов датчиков положения точного и грубого отсчетов в преобразователе угол-код, а также увеличением производительности цифровой системы управления электропривода за счет реализации ее с применением микроконтроллера. Таким образом, разрешающая способность измерения положения повышена до 22 разрядов и обеспечивает погрешность измерения угла поворота на уровне I".
Предлагаемое устройство обеспечивает позиционирование с точностью ±1 дискрета измерения положения и слежение, сопровождающееся вращением следящей оси с инфранизкими скоростями до 10 угловых секунд за секунду при значительных величинах моментов статического сопротивления и маховых масс на валу двигателя, что делает возможным применение цифрового электропривода для управления движением осей телескопов в режимах слежения за естественными космическими объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2520351C1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| Следящее устройство для бесконтактного измерения параметров углового движения объекта | 1988 |
|
SU1562702A1 |
Изобретение относится к области электротехники и может быть использовано в оптических телескопах и лидарных станциях обнаружения и сопровождения космических объектов. Техническим результатом является расширение скоростного диапазона электропривода в сторону инфранизких скоростей за счет повышении точности измерения углового положения исполнительной оси привода. В цифровой эектропривод, содержащий задающее устройство, последовательно соединенные регулятор положения, регулятор скорости, регулятор тока, второй вход которого соединен с измерительным выходом исполнительного двигателя, вал которого через редуктор механически связан с объектом управления, широтно-импульсный модулятор (ШИМ), выход которого соединен с усилителем мощности, дополнительно введены генератор опорного напряжения, датчики положения грубого и точного отсчетов, преобразователь угол-код, датчик скорости, причем датчики скорости и положения жестко укреплены на исполнительной оси электропривода за редуктором, управляющие входы датчиков положения соединены с выходом генератора опорного напряжения, а выходы датчиков положения соединены с преобразователем угол-код, выход которого соединен со вторым входом регулятора положения, выход датчика скорости соединен со вторым входом регулятора скорости. 1 з.п ф-лы, 2 ил.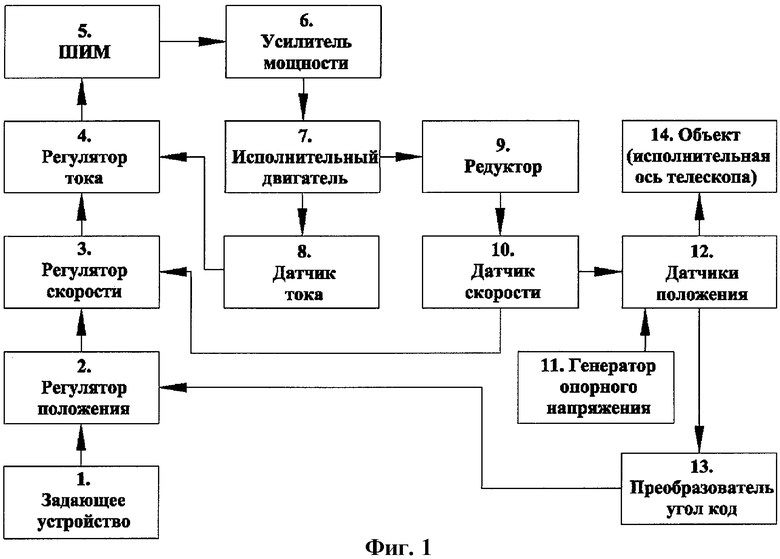
1. Цифровой электропривод, содержащий задающее устройство, последовательно соединенные регулятор положения, регулятор скорости, регулятор тока, второй вход которого через датчик тока соединен с измерительным выходом исполнительного двигателя, вал которого через редуктор механически связан с объектом управления, широтно-импульсный модулятор, выход которого соединен с усилителем мощности, отличающийся тем, что в него введены генератор опорного напряжения, датчики положения грубого и точного отсчетов, преобразователь угол-код, датчик скорости, причем датчики скорости и положения жестко укреплены на исполнительной оси электропривода за редуктором, управляющие входы датчиков положения соединены с выходом генератора опорного напряжения, а выходы датчиков положения соединены с преобразователем угол-код, выход которого соединен со вторым входом регулятора положения, выход датчика скорости соединен со вторым входом регулятора скорости.
2. Цифровой электропривод по п.1, отличающийся тем, что преобразователь угол-код выполнен из аналого-цифровых преобразователей грубого и точного отсчетов, трех логических элементов, двух сумматоров, трех регистров, микроконтроллера и CAN интерфейса, при этом преобразователь грубого отсчета первым выходом соединен с первым входом первого сумматора, а вторым выходом - с первым входом второго сумматора, второй вход которого соединен со вторым выходом первого сумматора, преобразователь точного отсчета первым выходом через упомянутые последовательно соединенные логические элементы соединен со вторым входом первого сумматора, а вторым и третьим выходом соединен через второй и третий регистры соответственно со вторым и третьим входами микроконтроллера, первый вход которого соединен с выходом первого регистра, первый вход которого соединен с первым выходом сумматора, а второй вход - с выходом второго сумматора, выход микроконтроллера через CAN интерфейс соединен со вторым входом регулятора положения.
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2280315C2 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| US 4254367 A, 03.03.1981 | |||
| US 4235072 A, 25.11.1980 | |||
| Способ определения относительной диэлектрической проницаемости материалов с потерями | 2022 |
|
RU2787650C1 |
| WO 8002780 A1, 11.12.1980 | |||
| KR 940004953 В1, 07.06.1994. | |||

