Изобретение относится к области ракетной техники, в частности к области разработки систем автоматического управления авиационными средствами поражения (САУ АСП).
При проектировании и испытании сложной САУ АСП широко применяются различные методы моделирования. В частности, математическое моделирование движения авиационного средства поражения (АСП) проводится в целях разработки и отладки алгоритмов системы автоматического управления. Важной проблемой моделирования является обеспечение требуемой точности, повышение достоверности проверки образцов составных частей АСП. Так как основным устройством, обеспечивающим требуемое качество управления АСП, является САУ АСП, как устройство выработки сигналов управления, содержащая измерительные устройства и блок формирования команд отклонения аэродинамическими/газодинамическими органами управления, то первостепенной задачей моделирования является ее проверка. В целях обеспечения ее проверки прибегают к методам полунатурного (или полуфизического) моделирования, при котором математическая модель составных частей АСП заменяется образцами составных частей АСП.
Наиболее близким к заявленному комплексу полунатурного моделирования движения АСП по технической сущности и достигаемому результату является моделирующий комплекс для проверки системы управления беспилотного летательного аппарата (БПЛА) (патент РФ №2432592), содержащий устройство моделирования бокового движения БПЛА и устройство моделирования продольного движения БПЛА, входящие в состав имитатора БПЛА, имитатор рулевых механизмов, имитатор измерителя координат объекта наблюдения, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, имитатор ветровых порывов, имитатор подстилающей поверхности, имитатор радиовысотомера, устройство выработки сигналов управления, устройство управления испытаниями, в состав которого входят пульт управления, задатчик параметров объекта наблюдения и блок формирования серии пусков.
Недостатками прототипа являются невозможность проведения оперативной корректировки алгоритмов работы устройства выработки сигналов управления, недостаточная достоверность моделирования системы автоматического управления БПЛА, заключающаяся в том, что измерительные устройства, обеспечивающие измерение координат объекта наблюдения, угловых скоростей, углов, линейных ускорений не подвергаются проверке, т.к. они заменены имитаторами, и, как следствие, невысокая точность и достоверность испытаний, а также отсутствие контроля и диагностики при проверке функционирования устройства выработки сигналов управления в процессе моделирования.
Целью изобретения является оптимизация процессов отладки, настройки и тестирования САУ АСП.
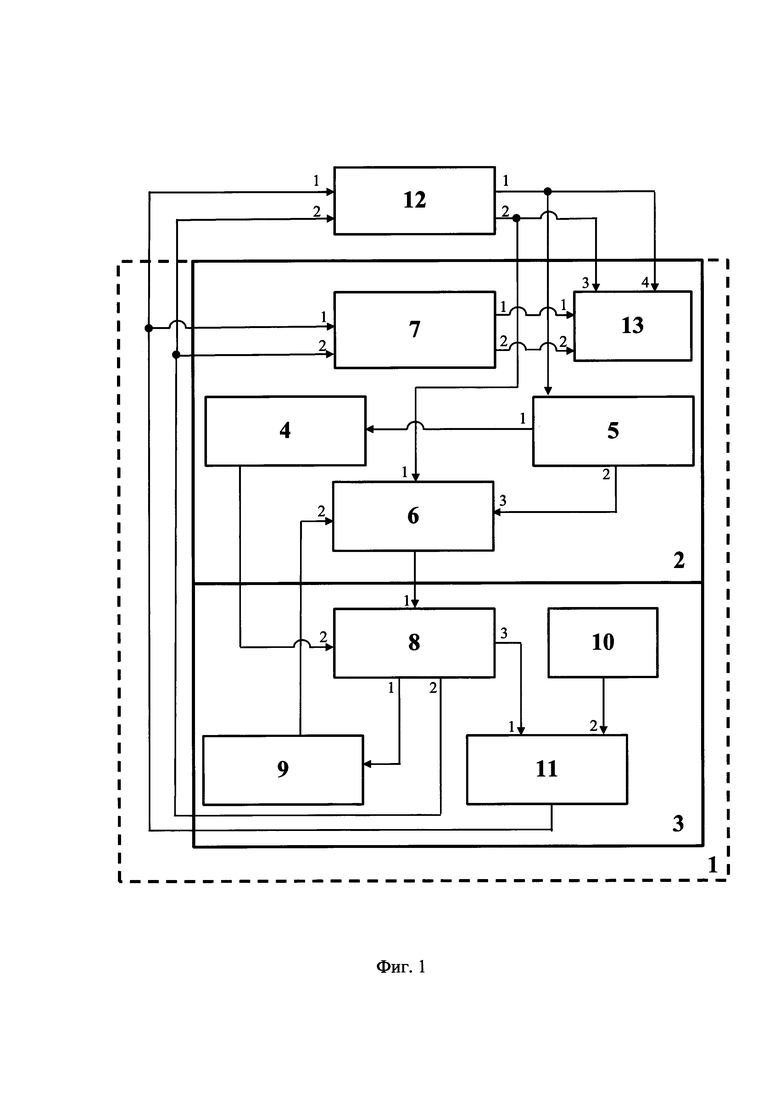
Техническим результатом настоящего изобретения является повышение достоверности моделирования и сокращение сроков разработки САУ АСП. Технический результат достигается за счет того, что в комплексе полунатурного моделирования движения АСП, содержащем устройства моделирования бокового движения АСП и моделирования продольного движения АСП, входящих в состав блока расчета уравнений поступательного и вращательного движения центра масс АСП 8 (см. фиг. 1, где цифры крупного шрифта обозначают блоки, а цифры мелкого шрифта входы и выходы блоков при необходимости), блок расчета движения цели 10, имитаторы ветровых порывов и подстилающей поверхности, входящих в состав блока математического моделирования окружающей среды 9, входящие в состав блока моделирования динамики полета АСП 3, имитаторы рулевых механизмов, образующие блок моделирования исполнительных органов 5, блок регистрации 13, блок расчета эталонной САУ АСП 7, содержащий имитатор измерителя координат цели, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, устройство выработки сигналов управления, входящие в состав блока моделирования АСП 2, дополнительно введены блок расчета кинематических уравнений взаимного движения АСП и цели 11, блок моделирования двигательной установки 4, блок моделирования аэродинамических характеристик 6, исследуемая САУ АСП 12, содержащая реальные устройство измерения координат цели, датчики угловых скоростей, измерители углов, измерители линейных ускорений, устройство выработки сигналов управления, при этом вход блока моделирования двигательной установки 4 соединен с первым выходом блока моделирования исполнительных органов 5, выход блока моделирования двигательной установки 4 соединен со вторым входом блока расчета уравнений поступательного и вращательного движения центра масс АСП 8, вход блока моделирования исполнительных органов 5 соединен с первым выходом САУ АСП 12 и с четвертым входом блока регистрации 13, второй выход блока моделирования исполнительных органов 5 соединен с третьим входом блока моделирования аэродинамических характеристик 6, первый вход блока моделирования аэродинамических характеристик 6 соединен со вторым выходом САУ АСП 12 и с третьим входом блока регистрации 13, второй вход блока моделирования аэродинамических характеристик 6 соединен с выходом блока математического моделирования окружающей среды 9, выход блока моделирования аэродинамических характеристик 6 соединен с первым входом блока расчета уравнений поступательного и вращательного движения центра масс АСП 8, первый выход блока расчета уравнений поступательного и вращательного движения центра масс АСП 8 соединен со входом блока математического моделирования окружающей среды 9, второй выход блока расчета уравнений поступательного и вращательного движения центра масс АСП 8 соединен со вторым входом САУ АСП 12 и со вторым входом блока расчета эталонной САУ АСП 7, третий выход блока расчета уравнений поступательного и вращательного движения центра масс АСП 8 соединен с первым входом блока расчета кинематических уравнений взаимного движения АСП и цели 11, второй вход блока расчета кинематических уравнений взаимного движения АСП и цели 11 соединен с выходом блока расчета движения цели 10, выход блока расчета кинематических уравнений взаимного движения АСП и цели 11 соединен с первым входом САУ АСП 12 и с первым входом блока расчета эталонной САУ АСП 7, первый и второй входы блока регистрации 13 соединены с первым и вторым выходами блока расчета эталонной САУ АСП 7 соответственно.
Таким образом, технический результат достигается за счет введения процедуры контроля соответствия результатов работы исследуемой (САУ АСП 12) с эталонной моделью САУ АСП (блок расчета эталонной САУ АСП 7), введения процедуры контроля качества работоспособности реальных измерительных устройств (блок моделирования АСП 2), обеспечивающие измерение координат объекта наблюдения, угловых скоростей, углов, линейных ускорений, входящих в состав САУ АСП, разделение модели движения АСП (имитатора АСП) на варьируемую часть, зависящую от конкретного АСП (САУ АСП 12) и неизменную (модель движения АСП 1), описывающую физические процессы динамики полета АСП (блок моделирования АСП 2) в атмосфере Земли (блок моделирования динамики полета АСП 3). Предлагаемое изобретение позволяет воспроизводить воздействие на датчиковую аппаратуру, входящую в состав АСП (САУ АСП 12) т.к. имеется связь между блоком расчета уравнений поступательного и вращательного движения центра масс АСП 8 и САУ АСП 12, что повышает достоверность моделирования системы автоматического управления.
Сущность предлагаемых технических решений поясняется графическими материалами:
на Фиг. 1 изображена структурно-функциональная схема комплекса полунатурного моделирования движения АСП.
на Фиг. 2 изображена блок-схема программы модели движения АСП.
на Фиг. 3 изображен вариант технической реализации модели движения АСП.
На фиг. 1 обозначены:
1 - Модель движения АСП;
2 - Блок моделирования АСП;
3 - Блок моделирования динамики полета АСП;
4 - Блок моделирования двигательной установки;
5 - Блок моделирования исполнительных органов;
6 - Блок моделирования аэродинамических характеристик;
7 - Блок расчета эталонной САУ АСП;
8 - Блок расчета уравнений поступательного и вращательного движения центра масс АСП;
9 - Блок математической модели окружающей среды;
10 - Блок расчета движения цели;
11 - Блок расчета кинематических уравнений взаимного движения АСП и цели;
12-САУ АСП;
13 - Блок регистрации.
В соответствии с фиг. 1 модель движения АСП 1 состоит из формализованного описания блока моделирования двигательной установки 4, обеспечивающего расчет и формирование вектора сил и моментов, действующего на центр масс АСП со стороны двигательной установки АСП. Реальное АСП может иметь несколько ступеней двигательной установки, а также двигательная установка может быть управляемой (по уровню тяги, например турбореактивная двигательная установка и/или направлению ориентации вектора тяги относительно корпуса АСП, например, двигательная установка с поворотным соплом), поэтому блок моделирования двигательной установки 4 имеет входной сигнал управления, поступающий с САУ АСП 12 на блок моделирования исполнительных органов 5, а уже потом в блок моделирования двигательной установки 4. Т.к. в двигательной установке АСП происходит процесс сжигания топлива, то формализованное описание блока моделирования двигательной установки 4 обеспечивает также расчет массоцентровочных и инерционных характеристик АСП, а именно: изменение массы АСП со временем; изменение положения центра масс АСП со временем; изменение тензора инерции АСП со временем. Эти данные необходимы для решения уравнений динамики полета в блоке расчета уравнений поступательного и вращательного движения центра масс АСП 8. Блок моделирования исполнительных органов 5 обеспечивает расчет изменения положения исполнительных органов АСП в соответствии с принятой конструктивно-компоновочной схемой АСП в зависимости от поступающих управляющих сигналов с САУ АСП 12. Блок моделирования исполнительных органов 5 обеспечивает расчет отклонения аэродинамических управляющих поверхностей, изменения углового положения поворотного сопла (при наличии), изменения сечения критики двигательной установки (при наличии) и т.д. Формализованное описание блока моделирования аэродинамических характеристик 6 обеспечивает расчет и формирование вектора (из трех элементов) сил и моментов действующих на планер АСП со стороны набегающего потока воздуха (со стороны атмосферы), эти данные необходимы для решения уравнений динамики полета в блоке расчета уравнений поступательного и вращательного движения центра масс АСП 8. Блок расчета уравнений поступательного и вращательного движения центра масс АСП 8 обеспечивает решение уравнений динамики полета АСП, а именно: формирование результирующего вектора сил и моментов, действующих на АСП на основе векторов с блока моделирования двигательной установки 4 и блока моделирования аэродинамических характеристик 6; расчет линейных ускорений и угловых скоростей, действующих на АСП в инерциальном пространстве и являющихся входным воздействием на датчики угловых скоростей и измерителей линейных ускорений; расчет угловой ориентации АСП; расчет линейных скоростей движения АСП в пространстве; расчет координат положения АСП в пространстве по общеизвестным уравнениям сложной динамики движения тела в поле тяготения Земли (см. [1, 2]). Блок математической модели окружающей среды 9 в соответствии с координатами положения АСП производит расчет параметров атмосферы для блока моделирования аэродинамических характеристик 6, а именно: термодинамическая температура, атмосферное давление, плотность атмосферы, скорость звука, число Маха, скоростной напор набегающего потока в соответствии с [3] и законами термодинамики. Формализованное описание блока расчета движения цели 10 обеспечивает расчет для блока расчета кинематических уравнений взаимного движения АСП и цели 11 параметров движения цели, а именно: линейные скорости движения цели; положение цели в пространстве. Блок расчета кинематических уравнений взаимного движения АСП и цели 11 обеспечивает расчет параметров взаимного движения АСП и цели, а именно: углы ориентации линии, соединяющей АСП и цель относительно корпуса АСП; угловые скорости вращения линии, соединяющей АСП и цель, в инерциальном пространстве.
САУ АСП 12 является предметом исследования средствами комплекса полунатурного моделирования движения АСП, обеспечивает формирование команд управления блока моделирования исполнительных органов 5 с целью наведения АСП на цель на основе данных с блока расчета кинематических уравнений взаимного движения АСП и цели 11 и блока расчета уравнений поступательного и вращательного движения центра масс АСП 8.
С целью проверки качества функционирования САУ АСП 12 поступающие на ее вход сигналы также дублируются на входе блока расчета эталонной САУ АСП 7 для последующего сравнения. Сравнение осуществляется путем сопоставления одноименных сигналов блока расчета эталонной САУ АСП 7 и САУ АСП 12 в блоке регистрации 13.
На фиг. 2 приведена укрупненная блок-схема программы, обеспечивающая расчет и совместное функционирование блока моделирования АСП 2 и блока моделирования динамики полета АСП 3. Принцип работы, заложенный в блок-схеме, следующий:
- элемент 14 - включение комплекса полунатурного моделирования движения АСП;
- элемент 15 - начальная выставка и инициализация блока расчета эталонной САУ АСП 7 и САУ АСП 12;
- элемент 16 - инициализация флагов контроля моделирования:
f_PUSK:=0 (флаг пуска АСП),
f_PUSK_0:=0 (значение флага f PUSK с предыдущего такта счета),
f_STOP:=0 (флаг окончания расчета);
- элемент 17 - организация «бесконечного цикла» типа:
while (1==1)
{
…
};
- элемент 18 - вызов процедуры (подпрограммы) чтения шины информационного взаимодействия;
-элемент 19 - расшифровка данных, считанных с шины информационного взаимодействия, в частности флага f_PUSK;
- элемент 20 - анализ изменения флага f_PUSK с низкого логического уровня на высокий, конструкция типа:
if(f_PUSK=1)&(f_PUSK_0==0)
{
…
} else {
…
}
- элемент 21 - в случае истинности условия в элементе 20 происходит присваивание f_PUSK_0:=1 (пуск обнаружен);
- элемент 22 - в случае истинности условия в элементе 20 и после выполнения элемента 21 происходит вызов процедуры (подпрограммы) инициализации исходных данных для расчета динамики полета АСП;
- элемент 23 - проверка условия пуска АСП и не нахождении комплекса полунатурного моделирования в состоянии расчета, конструкция типа
while (f_PUSK_0=1)&(f_STOP==0)
{
…
};
- элемент 24 - в случае истинности условия в элементе 23 происходит вызов процедуры (подпрограммы) расчета блока моделирования АСП 2 и блока моделирования динамики полета АСП 3;
- элемент 25 - в случае истинности условия в элементе 23 и после выполнения элемента 24 происходит вызов процедуры (подпрограммы) чтения/записи шины информационного взаимодействия;
- после выполнения элементов 24 и 25 происходит возврат исполнения к элементу 23;
- элемент 26 - в случае ложности условия в элементе 23 происходит анализ на предмет наступления события «останов расчета», конструкция типа
if(f_STOP=1)
{
…
};
- элемент 27 - в случае истинности условия в элементе 26 происходит инициализация флагов контроля моделирования, аналогичная элементу 16;
- в случае ложности условия в элементе 26 или после выполнения элемента 27 происходит возврат исполнения к элементу 17.
Техническая реализация предлагаемого комплекса полунатурного моделирования представляет собой вычислительную систему, состоящую из следующего оборудования (см. фиг. 3):
- ЭВМ 28, обеспечивающая расчет блоков моделирования АСП 2 и связь, по средствам шины данных CAN 2.0b и сети Ethernet блоков моделирования АСП 2 с блоками моделирования динамики полета АСП 3 и САУ АСП 12;
- ЭВМ 29, обеспечивающая расчет блока моделирования динамики полета АСП 3 и связь, по средствам шины данных CAN 2.0b и сети Ethernet блоков моделирования динамики полета АСП 3 с блоками моделирования АСП 2 и САУ АСП 12;
- консоль KVM 30 - обеспечивающая поочередное отображение процесса функционирования ЭВМ 28 и ЭВМ 29, выступает в качестве устройства отображения видеосигнала (монитора) и устройства управления (манипулятора типа «мышь» и клавиатуры) для соответствующих ЭВМ;
- коммутатор Ethernet 31 - обеспечивает формирование сети Ethernet для связи между ЭВМ 28 и ЭВМ 29.
ЭВМ 28 и ЭВМ 29 имеют следующие технические характеристики:
- тип установленного процессора - Intel Core-i7-4770 Haswell 3.4 ГГц/S1150;
- тип установленной оперативной памяти - модуль памяти DDR3 1600 МГц Non-ECC 8 Гб 4 шт.;
- видеоконтроллер - встроен в процессор;
- тип установленного жесткого диска -3.5". Жесткий диск 2Tб/SATA/7200 об/мин, серверный 2 шт.;
- оптический привод - DVD-RW;
-контролер Ethernet - Intel i217LM 10/100/1000 Мб/с, Intel I210-AT (РХЕ, Wol Teaming support);
- слотов PCI - 4.
Консоль KVM 30 должна обеспечивать возможность подключения не менее четырех ЭВМ одновременно.
Коммутатор Ethernet 31 должен быть коммутатором II уровня для обеспечения возможности одновременного подключения не менее четырех абонентов и иметь скорость обмена не ниже 1 Гб/с.
В качестве операционной системы на ЭВМ 28 и ЭВМ 29 может быть установлена защищенная операционная система реального времени (ЗОСРВ) "Нейтрино" КПДА. 10964-01 или POSIX-совместимая операционная система QNX 6.5.
С целью внесения изменений в исходный код программ на ЭВМ 28 и ЭВМ 29 необходимо задействование дополнительной ЭВМ 32 - управляющей. ЭВМ 32 подключается в сеть Ethernet и по средствам комплекта разработчика для ЗОСРВ «Нейтрино» программист удаленно проводит корректировку кода программ.
ЭВМ 32 используется и для оперативного внесения изменений в алгоритмы работы САУ АСП 12 средствами внутрисхемной отладки и программирования 33, что сокращает срок разработки САУ АСП за счет повышения оперативности корректировки программного кода САУ АСП 12 непосредственно в комплексе полунатурного моделирования движения АСП.
Комплекс полунатурного моделирования движения АСП при проверках САУ АСП 12 обеспечивает высокую точность и достоверность испытаний, возможность многократного увеличения объема испытаний реальной САУ АСП, по сравнению с натурными экспериментами, повышения оперативности корректировки программного кода САУ АСП 12 и получения объемов данных, достаточных для статистической обработки. При этом повышается достоверность проведения наземных испытаний при меньшей трудоемкости.
Источники информации.
1. Дмитриевский А.А. Внешняя баллистика. - М.: «Машиностроение», 1972 г. - 584 с.
2. Лойцянский Л.Г. Теоретическая механика. Ч. 1. Кинематика - Л.; М.: Гос. Техн.-теорет. Изд-во, 1932. - 288 с.
3. Глобальная справочная модель атмосферы на высотах от 0 до 100 километров для баллистического обеспечения ракетно-космической практики / С.В. Карасев. - Министерство обороны Российской Федерации, 2016 г. - 98 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, КОНТРОЛЯ И ДИАГНОСТИКИ МНОГОДВИГАТЕЛЬНЫМИ СИЛОВЫМИ УСТАНОВКАМИ | 2013 |
|
RU2554667C2 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| Способ полунатурных испытаний для обучения и настройки адаптивных систем автоматического управления беспилотных воздушных судов | 2023 |
|
RU2795073C1 |
| СПОСОБ ПОЛУНАТУРНОГО ИССЛЕДОВАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ | 1992 |
|
RU2039963C1 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |


Изобретение относится к области ракетной техники, в частности к области разработки систем автоматического управления авиационными средствами поражения (САУ АСП). Техническим результатом настоящего изобретения является повышение достоверности моделирования и сокращение сроков разработки САУ АСП. Технический результат достигается за счет того, что в заявленном комплексе полунатурного моделирования движения авиационного средства поражения (АСП) реализованы процедуры контроля соответствия результатов работы исследуемой с эталонной моделью САУ АСП, процедуры контроля качества работоспособности реальных измерительных устройств, обеспечивающие измерение координат объекта наблюдения, угловых скоростей, углов, линейных ускорений, входящих в состав САУ АСП, разделение модели движения АСП (имитатора АСП) на варьируемую часть, зависящую от конкретного АСП, и неизменную, описывающую физические процессы динамики полета АСП в атмосфере Земли. Предлагаемое изобретение позволяет воспроизводить воздействие на датчиковую аппаратуру САУ АСП. 3 ил.
Комплекс полунатурного моделирования движения авиационного средства поражения (АСП), содержащий устройство моделирования бокового движения АСП и устройство моделирования продольного движения АСП, входящие в состав блока расчета уравнений поступательного и вращательного движения центра масс АСП, блок расчета движения цели, имитаторы ветровых порывов и подстилающей поверхности, входящие в состав блока математической модели окружающей среды, образующие блок моделирования динамики полета АСП, имитаторы рулевых механизмов, образующие блок моделирования исполнительных органов, блок регистрации, блок расчета эталонной системы автоматического управления (САУ) АСП, содержащий имитатор измерителя координат цели, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, устройство выработки сигналов управления, входящие в состав блока моделирования АСП, отличающийся тем, что он дополнительно содержит блок расчета кинематических уравнений взаимного движения АСП и цели, блок моделирования двигательной установки, блок моделирования аэродинамических характеристик, исследуемую САУ АСП, содержащую реальные устройство измерения координат цели, датчики угловых скоростей, измерители углов, измерители линейных ускорений, устройство выработки сигналов управления, при этом вход блока моделирования двигательной установки соединен с первым выходом блока моделирования исполнительных органов, выход блока моделирования двигательной установки соединен со вторым входом блока расчета уравнений поступательного и вращательного движения центра масс АСП, вход блока моделирования исполнительных органов соединен с первым выходом исследуемой САУ АСП и с четвертым входом блока регистрации, второй выход блока моделирования исполнительных органов соединен с третьим входом блока моделирования аэродинамических характеристик, первый вход блока моделирования аэродинамических характеристик соединен со вторым выходом исследуемой САУ АСП и с третьим входом блока регистрации, второй вход блока моделирования аэродинамических характеристик соединен с выходом блока математического моделирования окружающей среды, выход блока моделирования аэродинамических характеристик соединен с первым входом блока расчета уравнений поступательного и вращательного движения центра масс АСП, первый выход блока расчета уравнений поступательного и вращательного движения центра масс АСП соединен со входом блока математического моделирования окружающей среды, второй выход блока расчета уравнений поступательного и вращательного движения центра масс АСП соединен со вторым входом исследуемой САУ АСП и со вторым входом блока расчета эталонной САУ АСП, третий выход блока расчета уравнений поступательного и вращательного движения центра масс АСП соединен с первым входом блока расчета кинематических уравнений взаимного движения АСП и цели, второй вход блока расчета кинематических уравнений взаимного движения АСП и цели соединен с выходом блока расчета движения цели, выход блока расчета кинематических уравнений взаимного движения АСП и цели соединен с первым входом исследуемой САУ АСП и с первым входом блока расчета эталонной САУ АСП, первый и второй входы блока регистрации соединены с первым и вторым выходами блока расчета эталонной САУ АСП соответственно.
| Способ получения 2-метокси-6, 9-дихлор-7-нитроакридина | 1959 |
|
SU126497A1 |
| KR 102114051 B1, 25.05.2020 | |||
| CN 102830622 A, 19.12.2012 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |

