Настоящее изобретение относится к роботу-воздухоочистителю и его системе, и в частности - к роботу-воздухоочистителю и его системе, который очищает окружающий воздух при одновременном перемещении в заданном участке.
В общем, робот-воздухоочиститель может определять расстояние до такого препятствия, как мебель, офисное оборудование или стена в заданном участке с помощью датчика расстояния и избегает столкновения с препятствием, выполняя задание.
Робот-воздухоочиститель имеет корпус робота, блок привода для приведения в движение корпуса робота, контроллер для управления блоком привода, запоминающее устройство и приемопередающий блок для ввода и вывода команды.
Задание включает в себя работу по уборке пола в качестве пылесоса, и это задание обычно выполняется по команде от оператора. Хотя в настоящее время имеется много роботов-уборщиков, но почти не имеется робота-воздухоочистителя, который выполнял бы очистку воздуха.
По причине возникших в последнее время опасностей в связи «азиатской пылью» и «острым респираторным синдромом в тяжелой форме» люди стали больше уделять внимания здравоохранению и проблеме более чистого и свежего воздуха.
Поэтому в промышленности имеется пока нерешенная задача обеспечения робота, выполняющего функцию очистки воздуха, который будет содействовать устранению упомянутых проблем.
Сущность изобретения
Настоящее изобретение разработано для устранения указных недостатков соответствующего уровня техники. Соответственно настоящее изобретение направлено на обеспечение робота-воздухоочистителя и его системы, выполненных с возможностью очистки воздуха при одновременном перемещении в заданном участке.
Указанная задача решается за счет обеспечения робота-воздухоочистителя, который выполняет очистку воздуха, при этом перемещаясь в заданном участке. Робот-воздухоочиститель состоит из корпуса робота, приводного блока для привода множества колес, расположенных на нижних частях корпуса робота, и из блока очистки воздуха, который установлен в корпусе робота, втягивает запыленный воздух в обрабатываемом участке, фильтрует воздух и выпускает очищенный воздух. Контроллер установлен в корпусе робота и управляет блоком воздухоочистки и блоком привода. Контроллер управляет блоком привода и блоком воздухоочистки одновременно, и поэтому робот перемещается в заданном участке и одновременно очищает воздух. Блок привода может содержать пару приводных электродвигателей, установленных в корпусе робота и работающих от подаваемой мощности; пару ведущих колес, вращаемых парой приводных электродвигателей; пару ведомых колес, следующих за ведущими колесами; и средство передачи мощности, соединяющее ведущие колеса и ведомые колеса.
Согласно примеру осуществления настоящего изобретения средство передачи мощности имеет зубчатый ремень привода, и корпус робота соединен с крышкой корпуса для формирования внешнего вида робота-воздухоочистителя. Блок воздухоочистки имеет источник привода всасывания, который втягивает запыленный воздух в заданном участке; канал всасывания, соединенный с одной стороной крышки корпуса, и выпускной канал, соединенный с другой стороной крышки корпуса для выпуска очищенного воздуха; канал воздухоочистки, расположенный в корпусе робота и сообщающийся с каналом всасывания и с выпускным каналом. В канале воздухоочистки установлено множество фильтров для фильтрации втягиваемого воздуха. Канал всасывания может находиться на одной стороне передней части крышки корпуса, и он также может находиться на одной стороне верхней части крышки корпуса. Выпускной канал также может находиться на другой стороне передней части крышки корпуса и может находиться на другой стороне верхней части крышки корпуса. Согласно другому осуществлению источник привода всасывания находится внутри канала воздухоочистки и втягивает воздух. Множество фильтров имеет первый фильтр для фильтрации относительно крупных частиц пыли из втянутого воздуха и второй фильтр для удаления более мелких частиц и неприятных запахов.
Указанные выше характеристики обеспечиваются при помощи системы робота-воздухоочистителя, которая включает в себя блок привода для приведения в действие множества колес и контроллер для управления блоком привода. Система робота-воздухоочистителя также содержит блок воздухоочистки, работающий под управлением контроллера; причем система перемещается автоматически в заданном участке, одновременно очищая воздух. Блок воздухоочистки может содержать источник привода всасывания для всасывания запыленного воздуха в заданном участке; канал всасывания, по которому втягивается воздух; и выпускной канал для выпуска очищенного воздуха. Блок воздухоочистки также содержит по меньшей мере один фильтр для фильтрации втягиваемого воздуха. Когда источник привода всасывания приводится в действие контроллером, воздух втягивается через канал всасывания и фильтруется фильтром. Очищенный воздух выпускается через выпускной канал.
Перечень фигур
Фиг.1 - перспектива робота-воздухоочистителя с блоком воздухоочистки согласно осуществлению настоящего изобретения;
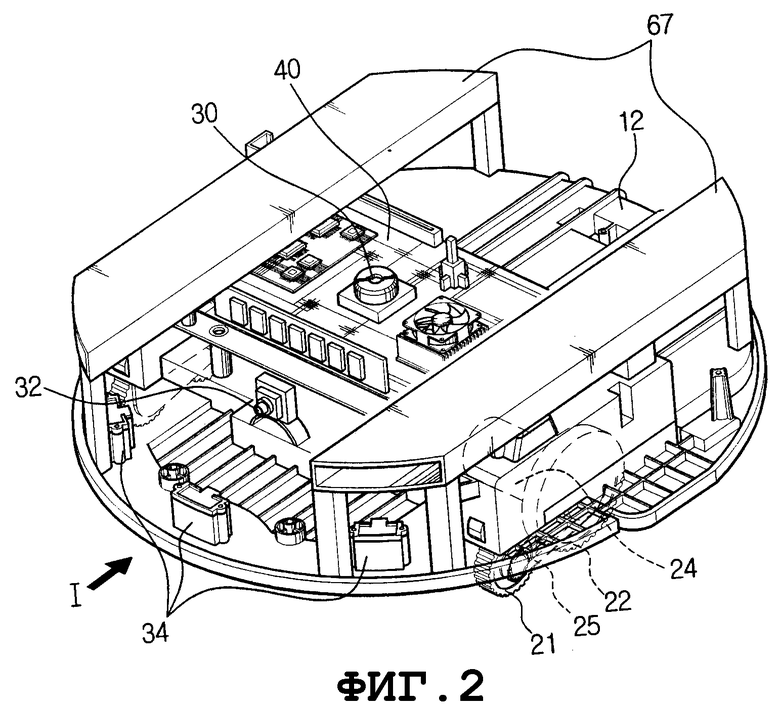
Фиг.2 - перспектива робота-воздухоочистителя, показанного на Фиг.1, в котором верхняя крышка удалена;
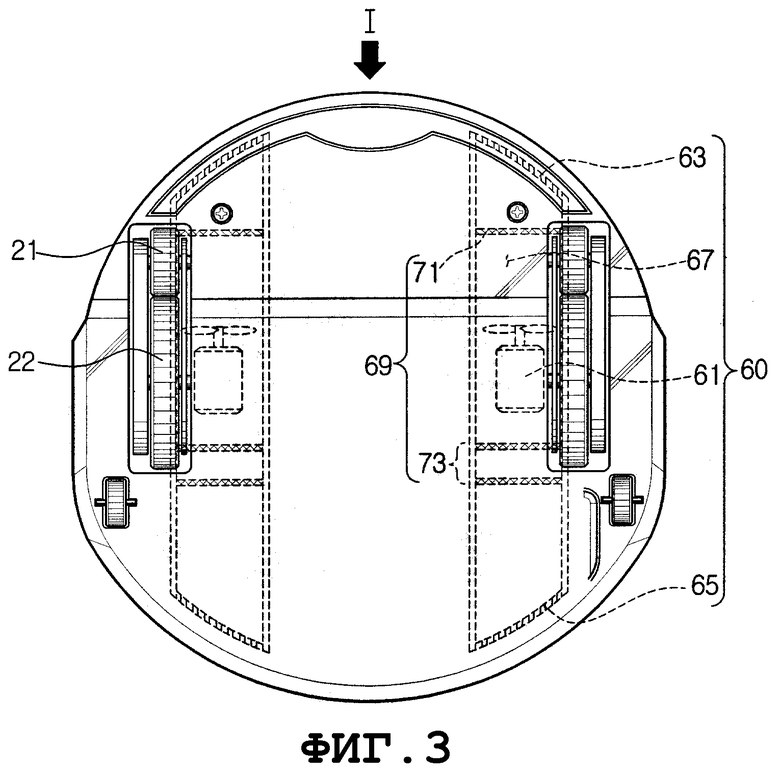
Фиг.3 - вид сверху, показывающий блок воздухоочистки робота-воздухоочистителя, показанного на Фиг.1;
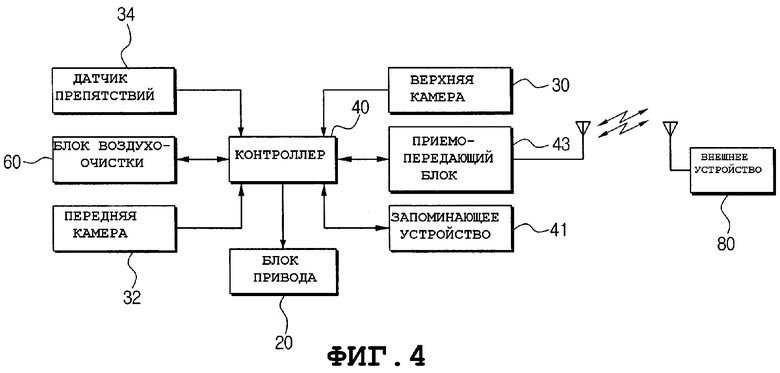
Фиг.4 - блок-схема центрального устройства управления системы робота-воздухоочистителя согласно одному из вариантов осуществления;
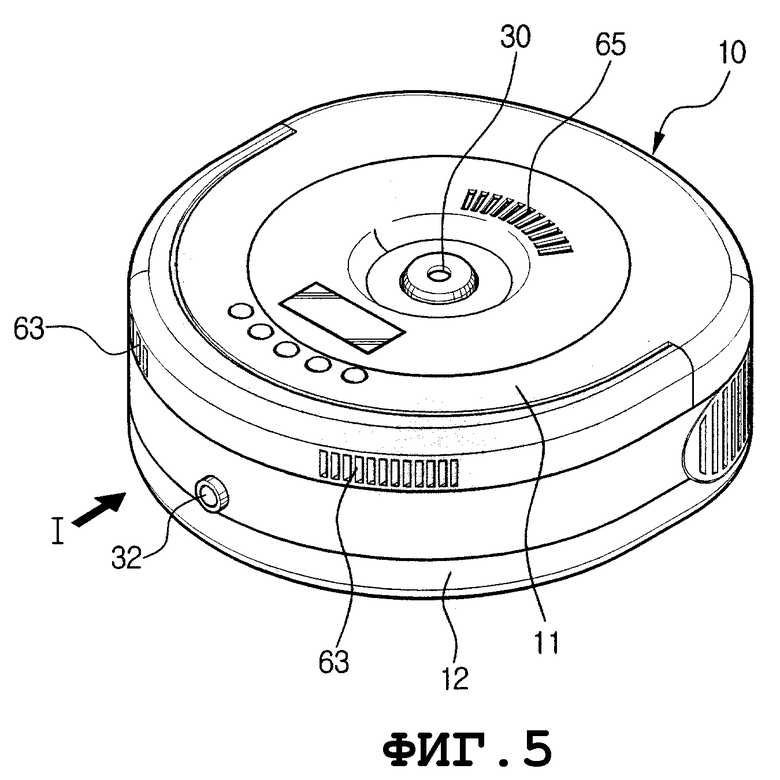
Фиг.5 - перспектива робота-воздухоочистителя, имеющего блок воздухоочистки согласно одному из вариантов осуществления.
Обращаясь к Фиг.1-4: ниже приводится подробное описание робота-воздухоочистителя и его системы согласно одному из вариантов осуществления настоящего изобретения, где обозначение I'' указывает направление движения робота. Обращаясь к Фиг.1-4: робот-воздухоочиститель, в качестве своих главных компонентов, содержит корпус 10, крышку 11 корпуса, соединенную с корпусом 12 и формирующую внешний вид робота-воздухоочистителя; блок привода 20, верхнюю камеру 30, переднюю камеру 32, датчик 34 препятствий, блок 60 воздухоочистки, контроллер 40, запоминающее устройство 41 и приемопередающий блок 43.
Блок привода 20 имеет два ведомых колеса 21, расположенных на обеих сторонах корпуса 11 робота; два ведущих колеса 22 на обеих задних сторонах корпуса 11 робота, пару электродвигателей 24, приводящих во вращение два задних ведущих колеса 22, соответственно; и средство 25 передачи мощности для передачи мощности от задних ведущих колес 22 на передние ведомые колеса 21. Средство 25 передачи мощности имеет зубчатый ремень привода (не показан) или зубчатую передачу (не показана). Блок 20 привода вращает пару электродвигателей 24 независимо по часовой стрелке или против часовой стрелки согласно сигналу управления от контроллера 40. Направление движения робота-воздухоочистителя 10 определяется вращением электродвигателей 24 на соответствующих скоростях оборотов в минуту.
Передняя камера 32 расположена в корпусе 12 и фотографирует изображения впереди, и выводит сфотографированные изображения в контроллер 40. Верхняя камера 30 расположена в корпусе 12 и фотографирует верхние изображения, и выводит сфотографированные изображения в контроллер 40. Согласно еще одному осуществлению верхняя камера 30 использует сверхширокоугольный объектив (не показан). Поскольку конструкция сверхширокоугольного объектива раскрыта в публикациях заявок Кореи №№1996-7005245, 1997-48669 и 1994-22112 и выпускается многими изготовителями, поэтому его подробное описание не приводится.
Датчики 34 препятствий установлены по периметру корпуса 12 через заданные интервалы и передают сигналы наружу, и принимают отраженный сигнал. Датчик 34 препятствий также может использовать ультразвуковой датчик, испускающий ультразвуковую волну и принимающий отраженную ультразвуковую волну. Датчик 34 препятствий используется для измерения расстояния до препятствия или стены. Датчик расстояния хода (не показан), подключенный к контроллеру 40, может использовать датчик определения вращения (не показан) для определения скорости вращения ведущих колес 22 и ведомых колес 21. В частности, датчик обнаружения вращения использует декодер для определения скорости вращения электродвигателей 24.
Блок 60 воздухоочистки установлен внутри корпуса 12 и втягивает воздух обрабатываемого участка, и отфильтровывает пыль (Фиг.3). Блок 60 воздухоочистки имеет источник 61 привода всасывания, канал 63 всасывания, соединенный с одной стороной крышки 11 корпуса; выпускной канал 65, соединенный с другой стороной крышки 11 корпуса; канал 67 воздухоочистки и множество фильтров 69. Источник 61 привода всасывания создает усилие всасывания для втягивания запыленного воздуха обрабатываемого участка. Источник 61 привода всасывания находится внутри канала 67 воздухоочистки, втягивает воздух и также создает усилие всасывания для блока 60 воздухоочистки в соответствии с работой приводного электродвигателя (не показан), тем самым обеспечивая приводное усилие для блока привода 20 робота-воздухоочистителя. Источник 61 привода всасывания можно выполнить в связи с приводным электродвигателем (не показан) или отдельно, если источник 61 привода всасывания будет обеспечивать усилие всасывания для блока 60 воздухоочистки. Источник 61 привода всасывания может содержать электродвигатель и вентиляторную систему.
Канал 63 всасывания установлен на одной передней стороне или одной верхней стороне крышки 11 корпуса, и выпускной канал 65 выполнен на другой передней стороне или другой верхней стороне крышки 11 корпуса. Согласно Фиг.1: канал 63 всасывания может находиться на одной передней стороне крышки 11 корпуса, при этом выпускной канал 65 может находиться на одной задней стороне крышки 11 корпуса. Таким образом, расположения канала 63 всасывания и выпускного канала 65 могут быть разными. Например, канал 63 всасывания может находиться на одной передней стороне крышки 11 корпуса; при этом выпускной канал 65 может находиться на одной верхней стороне крышки 11 корпуса , как показано на Фиг.5. Также могут быть предусмотрены по меньшей мере два канала 63 всасывания и по меньшей мере два выпускных канала 65. В этом случае каждый канал 63 всасывания и выпускной канал 65 могут располагаться независимо от канала 67 воздухоочистки либо могут соединяться с каналом 67 воздухоочистки.
Канал 67 воздухоочистки посредством текучей среды сообщается с каналом 63 всасывания через выпускной канал 65, и поэтому втянутый воздух через канал 63 всасывания с помощью источника 61 привода всасывания выходит через выпускной канал 65 по каналу 67 воздухоочистки. При наличии сообщения посредством текучей среды с каналом 63 всасывания через выпускной канал 65 линия сообщения может иметь такие разные формы, как прямая линия или искривленная линия.
Фильтры 69 фильтруют воздух, втягиваемый через канал 63 всасывания. Фильтры 69 содержат первый фильтр 71 и второй фильтр 73. Первый фильтр 71 отфильтровывает относительно крупные частицы пыли из воздуха; и при этом второй фильтр 73 отфильтровывает относительно мелкие частицы пыли и неприятные запахи из воздуха, из которого удалены крупные частицы пыли. Согласно другому варианту осуществления второй фильтр 73 использует выпускаемый промышленностью «гепа»-фильтр для отфильтровывания бактерий, вирусов, плесени, бытовой пыли и бактерий животных, которые могут вызывать расстройства дыхательной системы и аллергию у людей. Второй фильтр 73 может использовать выпускаемый промышленностью дезодорирующий фильтр для удаления различных запахов.
Контроллер 40 обрабатывает сигналы, принимаемые приемопередающим блоком 43, и управляет соответствующими компонентами робота. Робот-воздухоочиститель может также содержать клавиатуру ввода (не показана). При этом клавиатура ввода (не показана) выполнена в корпусе 12 и имеет клавиши для задания функций робота-воздухоочистителя 10, и контроллер 40 обрабатывает сигнал клавиши, вводимый клавиатурой (не показана).
Контроллер 40 управляет блоком 20 привода и блоком 60 воздухоочистки одновременно, в результате чего робот-воздухоочиститель 10 выполняет очистку воздуха, при этом перемещаясь в заданном участке. Запоминающее устройство 41 запоминает верхние изображения, фотографируемые верхней камерой 30, и помогает контроллеру 40 вычислять информацию о местоположении и перемещении.
Приемопередающий блок 43 передает данные на внешнее устройство 80 по антенне 42 и также передает сигналы, принимаемые от внешнего устройства 80, по антенне в контроллер 40. Внешнее устройство 80 имеет радиоретранслятор (не показан) и дистанционный контроллер (не показан), с помощью которых осуществляется ввод и вывод данных. В этом осуществлении внешнее устройство 80 является дистанционным контроллером.
Контроллер 40 управляет приводным блоком 20, чтобы перемещать робот-воздухоочиститель в рабочем участке согласно маршруту хода; создает карту изображений в отношении верхнего участка из верхних изображений, сфотографированных верхней камерой 30, и запоминает созданную карту изображений в запоминающем устройстве 41. Либо при получении команды по радиосигналу от клавиатуры или извне контроллер 40 распознает данное местоположение по созданной карте изображений во время работы. То есть, когда сигнал команды о выполнении работы или задания вводится радиосигналом через клавиатуру или извне, контроллер 40 распознает текущее местоположение путем сравнения текущего изображения, введенного из верхней камеры 30 или передней камеры 32, с запомненной картой изображений и дает команду приводному блоку 20 идти по маршруту от текущего местоположения в нужное местоположение. Сигнал команды о выполнении работы включает в себя команды о выполнении очистки или о контролировании с помощью камер 31, 32.
Когда робот-воздухоочиститель 10 идет по маршруту в нужное местоположение, блоку 20 привода дается команда вычислять ошибку хода, используя расстояние хода, измеренное датчиком положения, и текущее местоположение, распознанное путем сравнения сфотографированного сейчас изображения с запомненной картой изображений; и компенсировать ошибку, тем самым прослеживая маршрут хода к нужному местоположению. Во время движения робота-воздухоочистителя контроллер 40 дает команду блоку 60 воздухоочистки работать согласно сигналу команды о выполнении работы. Во время работы источника 61 привода всасывания под управлением контроллера 40: воздух втягивается через канал 63, фильтруется фильтрами 69 в блоке 60 воздухоочистки; и очищенный воздух выпускается из выпускного канала 65. Соответственно робот-воздухоочиститель 10 очищает воздух, при этом перемещаясь в заданном участке.
Когда пользователь с помощью внешнего устройства 80 вводит сигнал остановки работы блока 20 привода, робот-воздухоочиститель 10 останавливается в заданном положении, но продолжает очищать воздух. Когда пользователь с помощью внешнего устройства вводит сигнал остановки работы, очистка воздуха прекращается, контроллер 40 останавливает очистку воздуха и возвращает робот-воздухоочиститель 10 в исходное положение.
Приведенный выше пример осуществления и преимущества описаны только в качестве примера, и их не следует считать ограничивающими настоящее изобретение. Описание настоящего изобретения предназначено для пояснения, а не для ограничения объема притязаний. Многие альтернативы, модификации и варианты будут очевидны специалистам данной области техники. В формуле изобретения пункты «средство-плюс-функция» включают в себя описываемые здесь конструкции как выполняющие указываемые функции, и не только структурные эквиваленты, но также и эквивалентные конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ОЧИСТКИ ВОЗДУХА И ЕГО СИСТЕМА | 2004 |
|
RU2267975C1 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ УВЛАЖНИТЕЛЬ ВОЗДУХА | 2005 |
|
RU2322644C2 |
| РОБОТ-ЧИСТИТЕЛЬ, ОСНАЩЕННЫЙ ГЕНЕРАТОРОМ ОТРИЦАТЕЛЬНЫХ ИОНОВ | 2004 |
|
RU2279244C2 |
| КОМПАКТНЫЙ РОБОТ-ПЫЛЕСОС | 2006 |
|
RU2337603C2 |
| ПЫЛЕСБОРНИК РОБОТА-ПЫЛЕСОСА | 2004 |
|
RU2277372C2 |
| РОБОТ-УБОРЩИК С ФУНКЦИЕЙ ДЕЗИНФЕКЦИИ ПОЛА | 2004 |
|
RU2272557C2 |
| СИСТЕМА ВОЗДУХООЧИСТКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2025296C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
Изобретение относится к роботу-воздухоочистителю и его системе, которые выполнены с возможностью очистки воздуха, при этом перемещаясь в заданном участке. Робот-воздухоочиститель имеет корпус робота, блок привода для приведения в действие множества колес, расположенных на нижних частях корпуса робота; блок воздухоочистки, установленный в корпусе робота и втягивающий запыленный воздух в обрабатываемом участке, фильтрующий воздух и выпускающий очищенный воздух. Контроллер расположен в корпусе робота и управляет блоком воздухоочистки и блоком привода. Поскольку робот-воздухоочиститель и его система выполняют очистку воздуха, при этом автоматически двигаясь в заданном участке, обеспечивается улучшение уборки жилых помещений и повышено удобство эксплуатации робота. 2 н. и 11 з.п. ф-лы, 5 ил.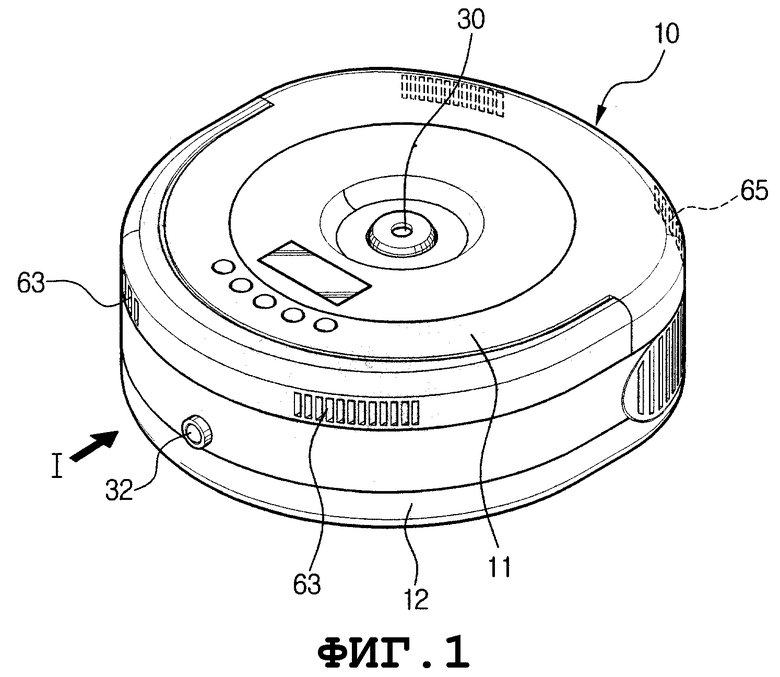
| US 6459955 B1, 01.10.2002.US 20020153184 A1, 24.10.2002.US 5839156 A, 24.11.1998.US 5534762 A, 09.07.1996.US 5353224 A, 04.10.1994.KR 9402792 A, 02.04.1994.RU 2127997 C1, 27.03.1999.RU 2019120 C1, 15.09.1994. |

