Настоящее изобретение относится к роботу-пылесосу с функцией очистки воздуха и системе уборки и более конкретно к роботу-пылесосу, выполненному с возможностью очистки окружающего воздуха в заданной зоне очистки с одновременной очисткой пола, и системе уборки.
Несмотря на удобства, появившиеся с изобретением пылесоса, уборка все еще остается утомительной домашней обязанностью, поскольку пользователю приходится самому переносить пылесос в разные места жилища. Для решения этой проблемы были предприняты работы по созданию робота-пылесоса, способного автоматически перемещаться и осуществлять уборку. Такой обычный робот-пылесос автоматически перемещается по заданной зоне и всасывает пыль и грязь с поверхности, не требуя участия пользователя. Однако у обычного робота-пылесоса отсутствует функция очистки воздуха, и он просто работает, всасывая пыль и грязь, тем самым очищая поверхность. В последнее время в связи со случаями атипичной пневмонии у многих покупателей возникла глубокая заинтересованность проблемами здоровья и поддержания чистоты и свежести воздуха. Настало время внедрить в робот-пылесос функцию очистки воздуха.
На фиг.1 представлен схематический вид обычного робота-пылесоса. Как показано на фиг.1, обычный робот-пылесос, т.е. не имеющий ни функции очистки воздуха, ни функции фильтрования воздуха, содержит корпус 7 и ведущие колеса 1 и ведомые колеса 2, расположенные на нижней части корпуса 7. Верхняя часть корпуса 7 имеет антенну 3 для обмена сигналами с удаленным контроллером, и датчик 4 расстояния, расположенные, соответственно, в заданных позициях.
Кроме того, корпус 7 оснащен приводным электродвигателем (не показан) для генерирования всасывающей силы, и пылесборником (не показан). Всасывающая сила, созданная приводным электродвигателем, передается на всасывающий порт 5, расположенный в нижней части корпуса 7 так, что пыль и грязь с очищаемой поверхности затягиваются во всасывающий порт 5 под воздействием всасывающей силы.
Однако у робота-пылесоса указанной конструкции, собирающего пыль и грязь с очищаемой поверхности, при движении по очищаемой зоне по заданной траектории движения возникают проблемы. Во-первых, поскольку робот-пылесос имеет только функцию очистки путем всасывания пыли и грязи с очищаемой поверхности, покупателю приходится покупать отдельное устройство для очистки воздуха, чтобы к роботу-пылесосу добавить функцию очистки воздуха. Во-вторых, если пыль с поверхности не полностью всосется во всасывающий порт 5 робота-пылесоса, не имеющего функции очистки воздуха, воздух в зоне очистки загрязняется, что приводит к потенциальному вреду для пользователя из-за загрязненного воздуха.
Таким образом, существует неудовлетворенная до сих пор потребность в устранении вышеуказанных недостатков и просчетов.
Настоящее изобретение создано для решения указанных выше проблем прототипа. Соответственно, технической задачей настоящего изобретения стало создание робота-пылесоса и системы уборки, которые очищают окружающий воздух в очищаемой зоне во время очистки поверхности.
Данная техническая заявка решается за счет того, что робот-пылесос согласно настоящему изобретению содержит корпус, привод, приводящий колеса, расположенные в нижней части корпуса, устройство всасывания пыли, выполненное в корпусе, для втягивания пыли с очищаемой поверхности, устройство очистки воздуха, выполненное в корпусе, для втягивания воздуха с пылью из очищаемой зоны, очистки воздуха и выпуска очищенного воздуха, и контроллер, расположенный в корпусе для управления приводом и устройством очистки воздуха, при этом на корпус установлена крышка, формирующая внешний вид робота-пылесоса, а устройство для очистки воздуха содержит привод системы всасывания для втягивания воздуха с пылью из зоны очистки, всасывающий порт, соединенный с одной стороной крышки корпуса, выпускной порт, соединенный с другой стороной крышки корпуса, тракт очистки воздуха, сообщающийся по текучей среде с всасывающим портом и выпускным портом, и фильтры, расположенные в тракте очистки воздуха для очистки втянутого воздуха.
Предпочтительно всасывающий порт сформирован на одной стороне передней части крышки корпуса.
Предпочтительно выпускной порт сформирован на другой стороне передней части крышки корпуса.
Предпочтительно всасывающий порт сформирован на одной стороне верхней части крышки корпуса.
Предпочтительно выпускной порт сформирован на другой стороне передней части корпуса крышки.
Предпочтительно выпускной порт сформирован на другой стороне верхней части корпуса крышки.
Предпочтительно привод системы всасывания расположен в тракте очистки воздуха для втягивания воздуха.
Предпочтительно фильтры содержат первый фильтр, отфильтровывающий относительно крупные частицы пыли из втянутого воздуха, и второй фильтр, отфильтровывающий мелкие частицы и незначительные запахи из воздуха.
Вышеуказанная техническая задача также решается за счет того, что система робота-пылесоса согласно изобретению содержит привод для привода колес, устройство всасывания пыли для втягивания пыли с очищаемой поверхности и контроллер для управления приводом и устройством всасывания пыли, дополнительно содержащая устройство очистки воздуха, управляемое контроллером, которая выполнена с возможностью осуществления уборки устройством для всасывания пыли и очистки воздуха устройством для очистки воздуха одновременно или избирательно и в которой устройство для очистки воздуха содержит привод системы всасывания для втягивания запыленного воздуха из заданной очищаемой зоны, всасывающий порт, через который втягивается воздух, выпускной порт, через который выпускается очищенный воздух, и по меньшей мере один фильтр для очистки втянутого воздуха, и при этом система выполнена с возможностью втягивания воздуха через всасывающий порт, очистки фильтром и выпуска через выпускной порт при включении привода системы всасывания контроллером.
Многие особенности настоящего изобретения будут лучше поняты при рассмотрении прилагаемых чертежей. Детали на чертежах не обязательно показаны в одном масштабе. Чертежи направлены на то, чтобы ясно показать принципы настоящего изобретения. Более того, на всех фигурах чертежей одинаковыми ссылочными позициями обозначены одинаковые элементы.
Другие системы, способы, признаки и преимущества настоящего изобретения будут понятны специалистам из нижеследующего описания со ссылками на прилагаемые чертежи. Следует понимать, что все такие дополнительные системы, способы, признаки и преимущества, включенные в настоящее описание, входят в объем настоящего изобретения и защищены прилагаемой формулой изобретения.
Фиг.1 - чертеж, иллюстрирующий известный робот-пылесос.
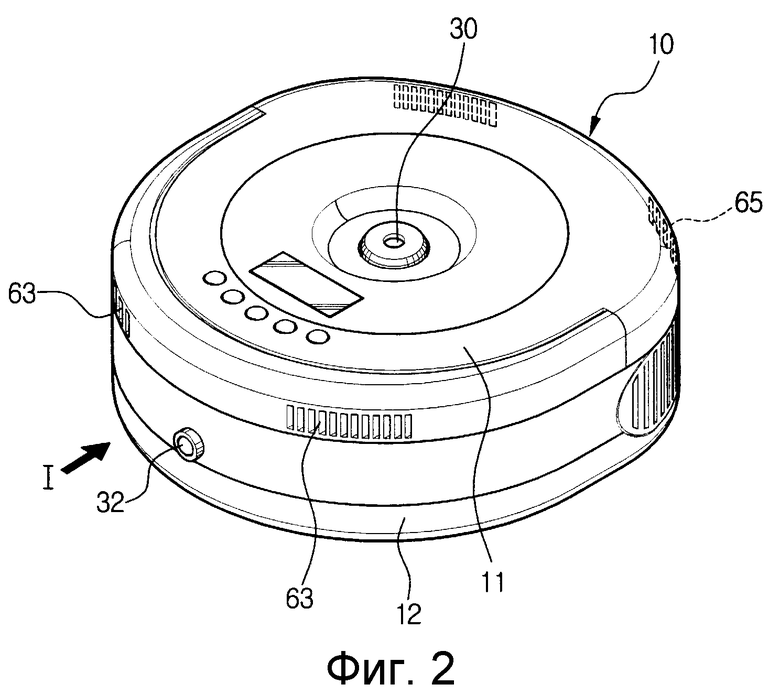
Фиг.2 - вид в перспективе, иллюстрирующий систему робота-пылесоса с устройством для очистки воздуха согласно одному варианту настоящего изобретения.
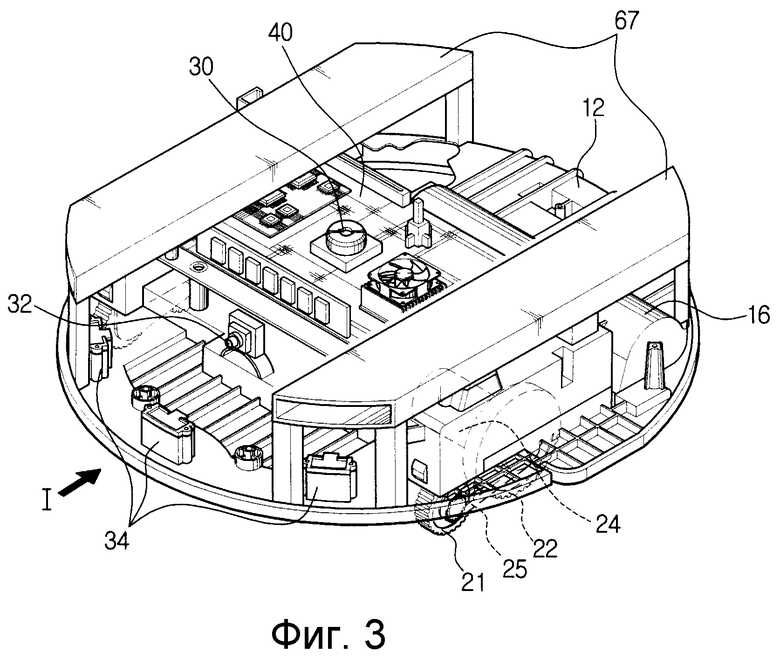
Фиг.3 - вид в перспективе, иллюстрирующий робот-пылесос с фиг.2 со снятой верхней крышкой.
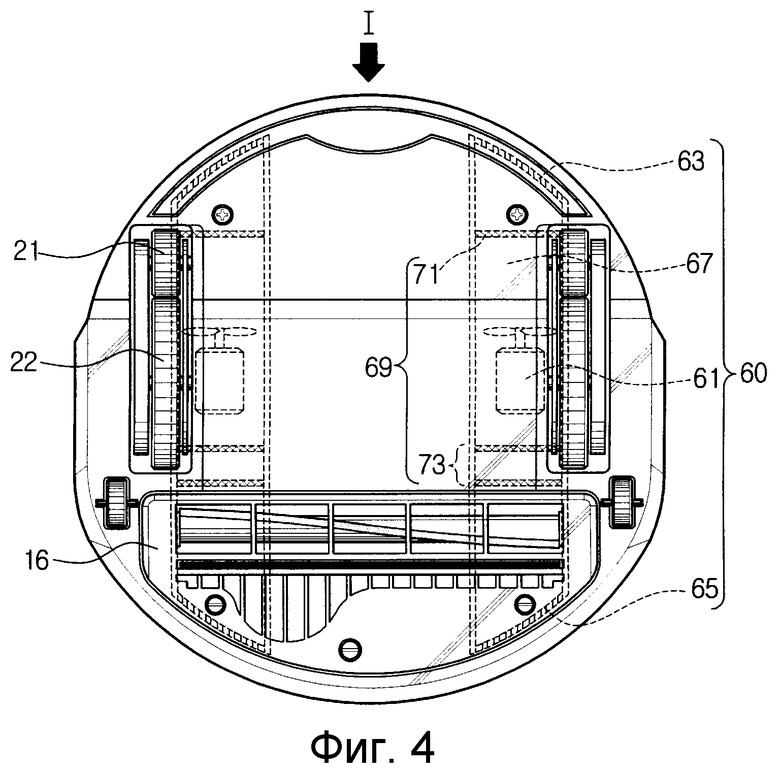
Фиг.4 - вид снизу, иллюстрирующий устройство для очистки воздуха робота-пылесоса с фиг.2.
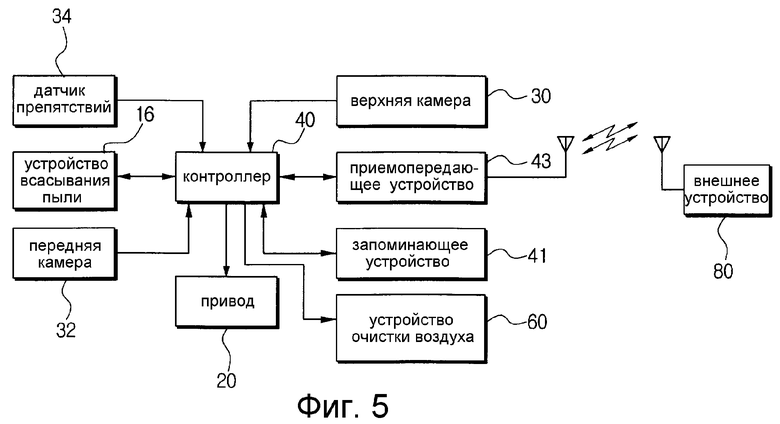
Фиг.5 - блок-схема центрального управляющего устройства системы робота-пылесоса согласно настоящему изобретению и
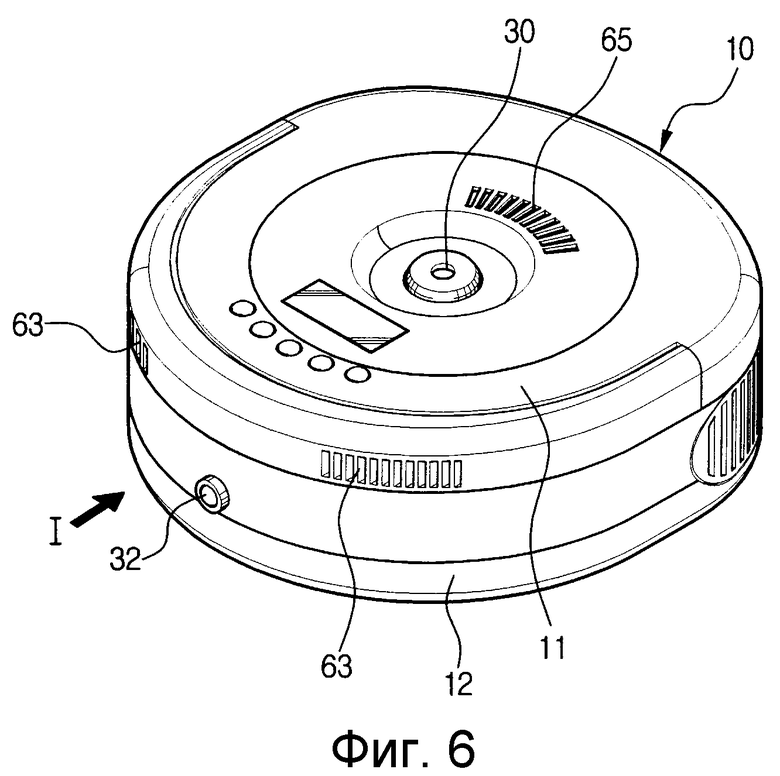
Фиг.6 - вид в перспективе, иллюстрирующий систему робота-пылесоса с устройством для очистки воздуха согласно варианту настоящего изобретения.
Ниже следует более подробное описание робота-пылесоса и системы робота-пылесоса согласно настоящему изобретению со ссылками на прилагаемые чертежи.
Как показано на фиг.2-5, робот-пылесос 10 содержит корпус 12, крышку 11 корпуса, соединенную с корпусом 12 для образования внешности робота-пылесоса 10, устройство 16 для всасывания пыли и устройство 20 привода. Робот-пылесос также содержит верхнюю камеру 30, переднюю камеру 32, датчик 34 препятствий, устройство 60 для очистки воздуха, контроллер 40, запоминающее устройство 41 и приемопередающее устройство 43. Позиция I обозначает направление, против которого движется робот-пылесос 10. Устройство 16 всасывания пыли выполнено на корпусе 12 для втягивания в себя запыленного воздуха и, тем самым, для сбора пыли с очищаемой поверхности. Устройство 16 всасывания пыли может иметь разнообразные хорошо известные формы. Например, устройство 16 всасывания пыли может иметь всасывающий электродвигатель (не показан) и камеру для сбора пыли, втянутой через всасывающий порт, или всасывающую трубку, сформированную напротив очищаемой поверхности и работающей от всасывающего электродвигателя.
Привод 20 содержит два ведомых колеса 21, расположенных спереди по обеим сторонам корпуса 12, два ведущих колеса 22, расположенных сзади по обеим сторонам корпуса 12, пару электродвигателей 24 для вращения двух задних колес 22 соответственно и зубчатый ремень 25 для передачи приводного усилия с задних колес 22 на передние колеса 21. Кроме того, привод 20 выполнен с возможность независимого вращения электродвигателей 24 по часовой стрелке или против часовой стрелки в соответствии с управляющим сигналом от контроллера 40. Направление движения робота-пылесоса 10 можно изменить, вращая электродвигатели 24 с разной частотой. Передняя камера 32 расположена на корпусе 20 для фотографирования изображений спереди и вывода полученных изображений на контроллер 40. Верхняя камера 30 расположена на корпусе 12 для фотографирования изображений сверху и вывода полученных изображений на контроллер 40. В другом варианте в верхней камере 30 применяется объектив типа "рыбий глаз" (не показан). Объектив типа "рыбий глаз" раскрыт в корейских заявках на патент №1996-7005245 и 1994-22112 и выпускается различными производителями оптики, поэтому его подробное описание опускается.
Датчики 34 препятствий размещены по периферии корпуса 12 с заданными интервалами для испускания сигналов наружу и для приема отраженных сигналов. Датчики 34 препятствий могут быть ультразвуковыми датчиками для излучения и приема ультразвука. Датчики 34 препятствий также используются для измерения расстояния до препятствия или стены.
Как показано на фиг.4, устройство 60 для очистки воздуха расположено с одной стороны корпуса 12 для втягивания воздуха из очищаемой зоны и для очистки воздуха. Устройство 60 для очистки воздуха содержит привод 61 системы всасывания, всасывающий порт 63, соединенный с одной стороной крышки 11 корпуса, выпускной порт 65, соединенный с другой стороной крышки 11 корпуса, тракт 67 очистки воздуха и фильтры 69. Привод 61 системы всасывания 61 создает всасывающую силу для затягивания воздуха и пыли из зоны очистки. Привод 61 системы всасывания может быть установлен в тракте 67 очистки воздуха и создает всасывающую силу вместе с всасывающим электродвигателем (не показан), который создает всасывающую силу для устройства всасывания пыли в корпуса 12.
Соответственно, привод 61 системы всасывания может быть выполнен либо в соединении с приводным электродвигателем (не показан), либо отдельно от приводного электродвигателя для создания всасывающей силы в устройстве 60 очистки воздуха. Привод 61 системы всасывания может состоять из электродвигателя и вентилятора.
Всасывающий порт 63 образован на одной стороне передней части крышки 11 корпуса или на одной стороне боковой части крышки 11 корпуса. Выпускной порт 65 образован на другой стороне передней части крышки 11 корпуса или на другой стороне боковой части крышки 11 корпуса. Как показано на фиг.2, всасывающий порт 63 сформирован на одной стороне передней части крышки 11 корпуса, тогда как выпускной порт 65 выполнен на одной стороне задней части крышки 11 корпуса. Положения, в которых сформированы всасывающий порт 63 и выпускной порт 65, могут меняться. Например, всасывающий порт 63 может быть образован на одной стороне передней части крышки 11 корпуса, тогда как выпускной порт 65 может быть образован на одной стороне верхней части крышки 11 корпуса, как показано на фиг.6. Кроме того, могут иметься по меньшей мере два всасывающих порта 63 и по меньшей мере два выпускных порта 65. В таком варианте каждый всасывающий порт 63 и выпускной порт 65 могут быть расположены независимо от тракта 67 очистки воздуха или могут соединяться с трактом 67 очистки воздуха.
Тракт 67 очистки воздуха находится в сообщении по текучей среде с всасывающим портом 63 и выпускным портом 65, так что воздух, втянутый через всасывающий порт 63 приводом 61 системы всасывания, выходит через выпускной порт 65, пройдя через тракт 67 очистки воздуха.
При условии обеспечения сообщения всасывающего порта 63 с выпускным портом 65 эта линия сообщения может иметь различные формы, например, прямую линию или изогнутую линию.
Фильтры 69 очищают воздух, втянутый через всасывающий порт 63. Фильтры 69 включают первый фильтр 71 и второй фильтр 73. Первый фильтр 71 отфильтровывает относительно крупные частицы пыли, а второй фильтр 73 отфильтровывает относительно мелкие частицы пыли и незначительные запахи из воздуха, из которого удалена крупная пыль. В другом варианте второй фильтр 73 может содержать высокоэффективный сухой воздушный фильтр для фильтрования мельчайших бактерий и вирусов, грибков, домашней пыли и пыли животных, которая может вызвать респираторные и аллергические заболевания у человека. Второй фильтр 73 может использовать общий дезодорирующий фильтр для устранения различных запахов.
Контроллер 40 обрабатывает сигналы, полученные через приемопередающее устройство 43 и соответственно управляет различными компонентами. Робот-пылесос 10 может дополнительно содержать клавиатуру (не показана). В этом варианте клавиатура (не показана) сформирована на корпусе 12 и содержит множество клавиш для задания функций робота-пылесоса и контроллер 40 обрабатывает сигналы клавиш, введенные с клавиатуры (не показана).
Контроллер 40 включает устройство 16 всасывания пыли и привод 20 и выдает команды роботу-пылесосу 10 на уборку зоны очистки. Контроллер 40 одновременно также управляет устройством 60 очистки воздуха. Включая привод 20 и одновременно устройство очистки воздуха 60, но не включая устройство 16 всасывания пыли, робот-пылесос 10 может выполнять только функцию очистки воздуха, передвигаясь по очищаемой зоне.
Запоминающее устройство 41 хранит сфотографированные верхней камерой 30 изображения, чтобы контроллер 40 мог рассчитать местоположение и направление движения. Приемопередающее устройство 43 передает данные на внешнее устройство 80 через передатчик (не показан), установленный в контроллере 40 (не показан), и передает сигналы, принятые от внешнего устройства 80, на контроллер 40. Внешнее устройство 80 может быть беспроводным релейным устройством (не показано) или дистанционным контроллером (не показан), через который передаются и принимаются данные. В этом варианте внешнее устройство 80 является дистанционным контроллером.
Ниже следует подробное описание работы системы робота-пылесоса, имеющей функцию очистки воздуха описанной конструкции. Когда от внешнего устройства 80 поступает команда на работу, робот-пылесос 10 получает эту команду через приемопередающее устройство 43. В зависимости от того, какая поступила команда - на уборку или на очистку воздуха, контроллер 40 включает привод 20, устройство 16 всасывания пыли или устройство 60 очистки воздуха. Соответственно, автоматически пересекая заданную зону, робот-пылесос 10 выполняет уборку с помощью устройства 16 для всасывания пыли и очистку воздуха с помощью устройства 60 для очистки воздуха или избирательно выполняет или уборку, или очистку воздуха.
Когда контроллер 40 включает привод 61 системы всасывания, воздух втягивается через всасывающий порт 63, очищается фильтрами 69 устройства 60 очистки воздуха и выпускается через выпускной порт 65. Когда через внешнее устройство 80 вводится сигнал на останову работы привода 20, робот-пылесос останавливается в заданном местоположении, но продолжает выполнять очистку воздуха. Как описано выше, робот-пылесос 10 выполняет уборку и очистку воздуха одновременно или избирательно. Поскольку вышеописанные робот-пылесос и система робота-пылесоса для очистки поверхности имеют функцию очистки воздуха, пользователю не нужно покупать отдельный воздухоочиститель, что дает ему дополнительное преимущество. Кроме того, поскольку робот-пылесос очищает и освежает воздух в заданной зоне очистки, он способствует созданию более свежей среды в жилище.
Вышеописанные варианты и преимущества являются иллюстративными и не должны толковаться как ограничивающие настоящее изобретение. Описание настоящего изобретения является иллюстративным и не ограничивает объем формулы. Специалистам понятны различные возможные альтернативы, изменения и модификации. В формуле изобретения пункты "средство+функция" предназначены для охвата описанных структур, выполняющих приведенную функцию, и не только структурные эквиваленты, но и эквивалентные структуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ВОЗДУХООЧИСТИТЕЛЬ И ЕГО СИСТЕМА | 2004 |
|
RU2264155C1 |
| ЦИКЛОННОЕ ПЫЛЕОТДЕЛЯЮЩЕЕ УСТРОЙСТВО ПЫЛЕСОСА | 2008 |
|
RU2374978C2 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ УВЛАЖНИТЕЛЬ ВОЗДУХА | 2005 |
|
RU2322644C2 |
| ПЫЛЕСОС-РОБОТ, СОЗДАЮЩИЙ ВОЗМУЩЕНИЯ ПОСРЕДСТВОМ ВОЗДУХА | 2002 |
|
RU2251958C2 |
| ПЫЛЕСОС ДЛЯ ВЛАЖНОЙ И СУХОЙ УБОРКИ | 2003 |
|
RU2249425C2 |
| РОБОТ-ПЫЛЕСОС | 2013 |
|
RU2539647C2 |
| ЦИКЛОННЫЙ ПЫЛЕОТДЕЛИТЕЛЬ (ВАРИАНТЫ) И ПЫЛЕСОС, СОДЕРЖАЩИЙ ЦИКЛОННЫЙ ПЫЛЕОТДЕЛИТЕЛЬ | 2005 |
|
RU2309658C2 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ ДЕТЕКТОР ТЕЛА | 2005 |
|
RU2318652C2 |
| ПЫЛЕСОС | 1996 |
|
RU2121288C1 |
| ПЫЛЕСОС | 2007 |
|
RU2352241C2 |
Робот-пылесос для очистки окружающего воздуха в очищаемой зоне во время уборки очищаемой поверхности и система робота- пылесоса содержат корпус, привод для привода колес, расположенных в нижней части корпуса, устройство всасывания пыли, выполненное в корпусе для втягивания пыли с очищаемой поверхности, и устройство очистки воздуха, сформированное в корпусе для втягивания воздуха с пылью из очищаемой зоны. Робот-пылесос очищает воздух и выпускает очищенный воздух и, используя контроллер, расположенный в корпусе, управляет приводом и устройством очистки воздуха. Технический результат - способность создания более свежей среды в жилище. 2 н. и 7 з.п. ф-лы, 6 ил.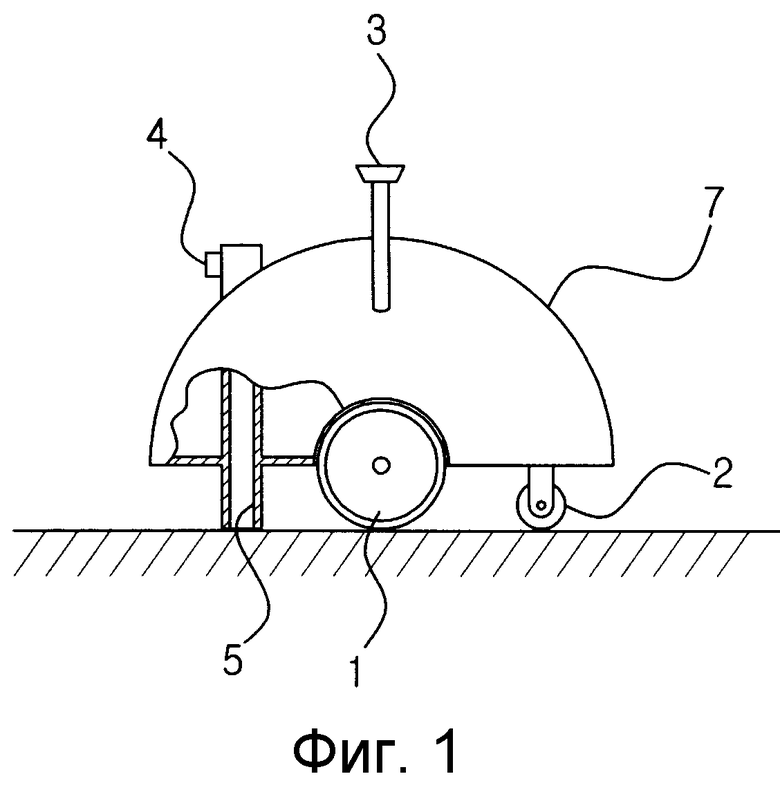
| US 6459955 B1, 01.10.2002 | |||
| US 5839156 А, 24.11.1998 | |||
| ПЫЛЕСОС С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2127997C1 |
| US 20020153184 A1, 24.10.2002 | |||
| ПРОИЗВОДНЫЕ 2-((4-(4-(БЕНЗИЛОКСИ)ПИРИМИДИН-2-ИЛ)ПИПЕРАЗИН-1-ИЛ)МЕТИЛ)-1Н-БЕНЗО[d]ИМИДАЗОЛА В КАЧЕСТВЕ НИЗКОМОЛЕКУЛЯРНЫХ АГОНИСТОВ РЕЦЕПТОРА ГЛЮКАГОНОПОДОБНОГО ПЕПТИДА-1 | 2024 |
|
RU2838323C1 |
| ПЫЛЕСОС | 2000 |
|
RU2180513C1 |

