Настоящее изобретение относится к роботу-чистителю (роботу-пылесосу), оснащенному генератором отрицательных ионов, и, более точно, к роботу-чистителю, который автоматически перемещается для чистки поверхности, подвергаемой чистке, и одновременно генерирует отрицательные ионы.
Общеизвестный робот-чиститель выполняет задачу чистки, не требуя вмешательства пользователя, за счет того, что оно перемещается автоматически и всасывает пыль, находящуюся на полу.
Робот-чиститель определяет расстояния до препятствий, таких как мебель, офисная техника и стены в зоне, подвергаемой чистке, с помощью датчика и избирательно приводит в действие два электродвигателя, установленные в нем, для предотвращения столкновений с препятствиями или блокирования препятствиями его перемещения. Робот-чиститель изменяет направление своего движения без внешнего содействия во время выполнения задачи чистки.
Как показано на фиг.1, робот-чиститель включает в себя корпус чистящего устройства, два вспомогательных колеса, смонтированных на обеих сторонах нижней передней части корпуса чистящего устройства, и два ведущих колеса. Ведущие колеса смонтированы на обеих нижних задних сторонах корпуса чистящего устройства. Робот-чиститель также включает в себя два электродвигателя, предназначенные для приведения во вращение двух ведущих колес, и синхронный ремень, предназначенный для передачи движущей силы от задних ведущих колес передним вспомогательным колесам. Кроме того, на переднем конце корпуса чистящего устройства расположено всасывающее отверстие, предназначенное для всасывания инородных частиц, таких как пыль, с поверхности, подвергаемой чистке. Всасывание во всасывающий канал осуществляется посредством приводного двигателя (непоказанного).
Робот-чиститель с вышеуказанной конструкцией автоматически изменяет направление движения путем избирательного приведения в действие двух электродвигателей. Робот-чиститель направляет всасывающий канал так, чтобы обеспечить удаление инородных частиц с поверхности, подвергаемой чистке. Обычно робот-чиститель перемещается и всасывает внутрь пыль или грязь, находящиеся на полу, через всасывающее отверстие и выпускает отфильтрованный воздух. Следовательно, пыль, находящаяся вне зоны непосредственной очистки, остается на поверхности, подвергаемой чистке. Пыль, находящаяся на полу, может подниматься в воздух и рассеиваться в воздухе, тем самым вызывая необходимость в проветривании в течение некоторого времени после выполнения чистки. Кроме того, для очистки воздуха пользователю приходится покупать дополнительные генераторы ионов, по меньшей мере, по одному на каждое помещение. Если пользователь снабдит каждое помещение генераторами ионов, это приведет к слишком большим затратам.
Наиболее близким аналогом настоящего изобретения является робот-чиститель, раскрытый в опубликованной заявке Германии №10164278. Этот робот-чиститель содержит корпус чистителя, который автоматически перемещается по подвергаемой чистке зоне, привод, предназначенный для приведения в движение множества колес, смонтированных на нижней части корпуса чистителя, всасывающее устройство, смонтированное в корпусе робота-чистителя и предназначенное для всасывания пыли, находящейся на полу, и управляющее устройство, предназначенное для управления приводом для приведения робота-чистителя в действие в соответствии с предварительно занесенной в память траекторией перемещения, при этом робот-чиститель при автоматическом перемещении по зоне, подвергаемой чистке, выполняет чистку посредством всасывания путем использования всасывающего устройства.
Таким образом, до настоящего времени в данной отрасли существует нерешенная проблема, связанная с необходимостью устранения вышеуказанных недостатков и несоответствий.
Настоящее изобретение позволяет решить вышеуказанные проблемы, связанные с устройствами по известному уровню техники. Соответственно, задачей настоящего изобретения является создание робота-чистителя, способного автоматически перемещаться по заранее заданной зоне при выполнении очистки посредством всасывания и/или очистки воздуха или одновременно, или выборочно.
Для достижения описанных выше задач и признаков настоящего изобретения предлагается робот-чиститель, содержащий корпус робота-чистителя, который автоматически перемещается по зоне, подвергаемой чистке, привод для приведения в движение множества колес, смонтированных на нижней части корпуса робота-чистителя, всасывающее устройство, смонтированное в корпусе робота-чистителя и предназначенное для всасывания пыли, находящейся на полу, устройство для генерации отрицательных ионов, смонтированное в корпусе робота-чистителя, и управляющее устройство, предназначенное для управления приводом для приведения робота-чистителя в действие в соответствии с предварительно занесенной в память траекторией перемещения и предназначенное для управления работой устройства для генерации отрицательных ионов, при этом робот-чиститель в процессе автоматического перемещения по зоне, подвергаемой чистке, выполняет чистку посредством всасывания путем использования всасывающего устройства и очистку воздуха путем использования устройства для генерации отрицательных ионов одновременно или выборочно.
Предпочтительно устройство для генерации отрицательных ионов содержит прямоточный вентилятор, электродвигатель вращательного движения, предназначенный для приведения прямоточного вентилятора во вращение путем использования источника питания и для выпуска воздуха в корпусе робота-чистителя, выпускной канал для выпуска воздуха из корпуса робота-чистителя, элемент с решетчатой частью, смонтированный на одном конце выпускного канала и имеющий множество отверстий, и генератор отрицательных ионов, смонтированный в элементе с решетчатой частью и предназначенный для генерации отрицательных ионов в воздухе, который выпускается из выпускного канала.
Предпочтительно устройство для генерации отрицательных ионов содержит множество фильтров, предназначенных для улавливания пыли, содержащейся в воздухе, и в котором отфильтрованный воздух выпускается в заранее заданное пространство через выпускное отверстие, образованное в соответствии с местоположением элемента с решетчатой частью на одной стороне крышки корпуса.
Предпочтительно множество фильтров содержит первый фильтр для отфильтровывания из всосанного воздуха пыли, состоящей из крупных частиц, и второй фильтр для отфильтровывания частиц тонкодисперсной пыли и устранения неприятных запахов.
Предпочтительно привод содержит два приводных электродвигателя, установленных в корпусе робота-чистителя и приводимых в действие с помощью источника питания, соответственно подаваемого к ним, два ведущих колеса, приводимых во вращение посредством двух приводных электродвигателей, два вспомогательных колеса, приводимых во вращение согласованно с двумя ведущими колесами, и средство для передачи движущей силы, - предназначенное для обеспечения вращения ведущих колес и вспомогательных колес совместно друг с другом.
Предпочтительно средство для передачи движущей силы представляет собой синхронный ремень.
Предпочтительно элемент с решетчатой частью заземлен на корпус робота-чистителя.
Предпочтительно элемент с решетчатой частью выполнен из антистатического полимера для исключения зарядки его положительным электрическим зарядом.
Другие системы, способы, признаки и преимущества настоящего изобретения будут или станут очевидными для специалиста в данной области техники при изучении нижеприведенных чертежей и подробного описания. Предусмотрено, что все подобные дополнительные системы, способы, признаки и преимущества включены в данное описание, находятся в пределах объема настоящего изобретения и защищены сопровождающей формулой изобретения.
Лучшее понимание этих и других признаков, особенностей и преимуществ настоящего изобретения будет обеспечено при изучении нижеприведенного описания, приложенной формулы изобретения и сопровождающих чертежей, в которых:
фиг.1 представляет собой чертеж, показывающий конструкцию нижней части обычного робота-чистителя;
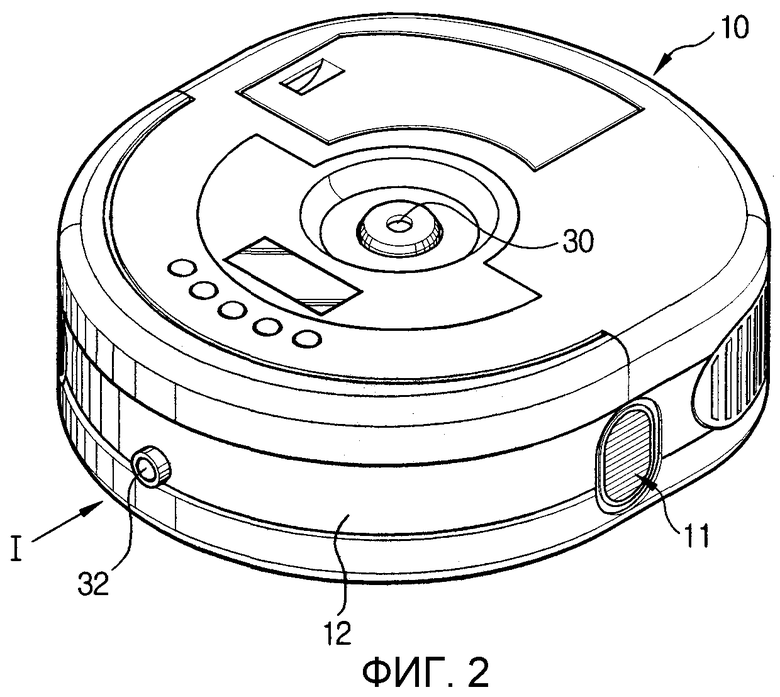
фиг.2 представляет собой чертеж, показывающий вид в перспективе робота-чистителя, оснащенного генератором отрицательных ионов в соответствии с настоящим изобретением;
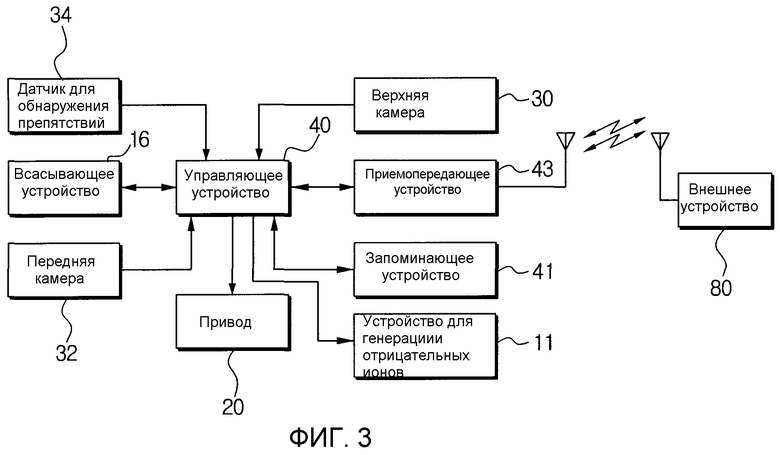
фиг.3 представляет собой блок-схему, иллюстрирующую систему управления, предусмотренную внутри робота-чистителя в соответствии с настоящим изобретением;
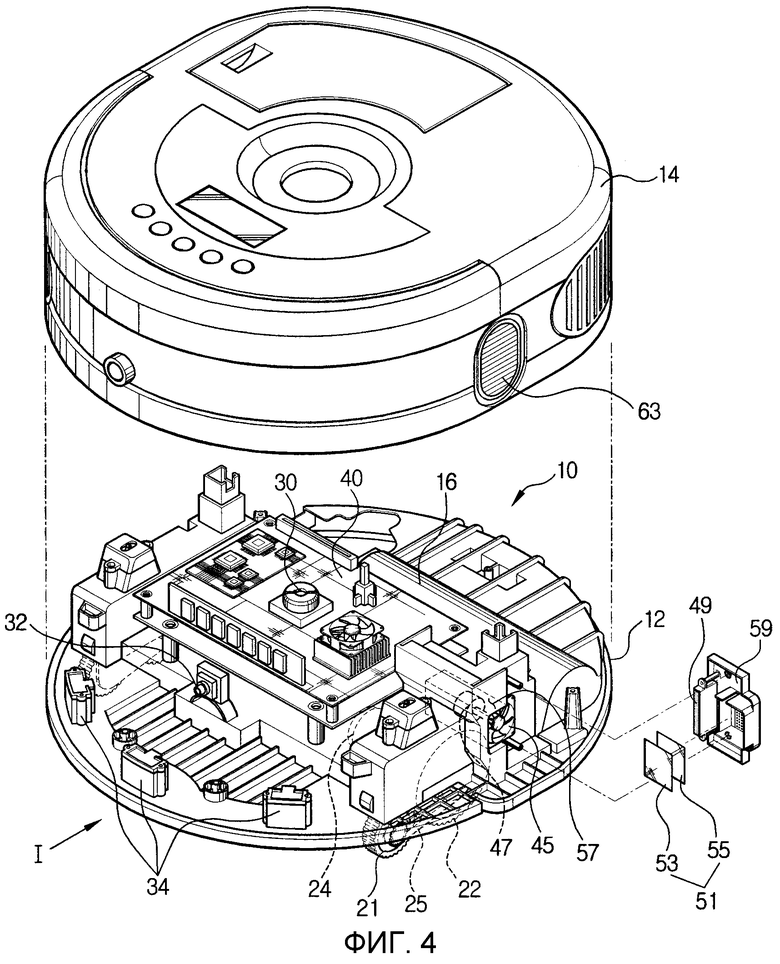
фиг.4 представляет собой чертеж, показывающий выполненное с пространственным разделением элементов перспективное изображение основных частей робота-чистителя в соответствии с настоящим изобретением; и
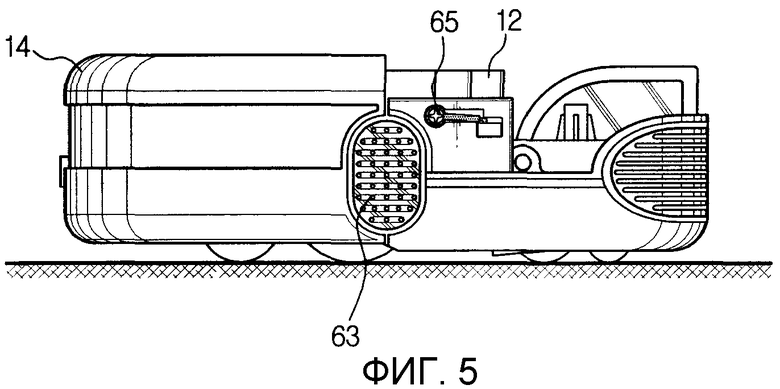
фиг.5 представляет собой вид сбоку робота-чистителя, имеющего генератор отрицательных ионов, заземленный в соответствии с вариантом осуществления настоящего изобретения.
Далее предпочтительные варианты осуществления робота-чистителя согласно настоящему изобретению будут описаны подробно со ссылкой на сопровождающие чертежи.
Как показано на фиг.2-4, робот-чиститель содержит корпус 12 чистящего устройства, крышку 14 корпуса, соединенную с корпусом 12 чистящего устройства, всасывающее устройство 16, привод 20, верхнюю камеру 30, переднюю камеру 32, датчик 34 для обнаружения препятствий, управляющее устройство 40, устройство 11 для генерации отрицательных ионов, запоминающее устройство 41 и приемопередающее устройство 43. Ссылочный символ 'I' обозначает переднюю сторону робота-чистителя.
Всасывающее устройство 16 смонтировано на корпусе 12 чистящего устройства и предназначено для сбора пыли с противолежащей поверхности пола за счет всасывания воздуха. Всасывающее устройство 16 может быть сконструировано в соответствии с различными хорошо известными способами. Например, всасывающее устройство 16 может содержать электродвигатель для создания всасывающей силы (непоказанный) и пылесборник для сбора пыли, которая всасывается внутрь через впускное отверстие или всасывающее отверстие, которое обращено к полу, за счет приведения в действие электродвигателя, предназначенного для создания всасывающей силы.
Привод 20 включает в себя два вспомогательных колеса 21, смонтированных на обеих передних сторонах, два ведущих колеса 22, смонтированных на обеих задних сторонах, два приводных электродвигателя 24, предназначенных для приведения во вращение соответствующих двух задних ведущих колес 22, и средство 25 для передачи движущей силы, предназначенное для передачи движущей силы от задних ведущих колес 22 передним вспомогательным колесам 21.
В данном варианте осуществления средство 25 для передачи движущей силы выполнено в виде синхронного ремня или шкива для передачи вращения. Кроме того, привод 20 обеспечивает приведение электродвигателей 24 во вращение независимо друг от друга, в направлении по часовой стрелке или против часовой стрелки, в соответствии с управляющим сигналом от управляющего устройства 40. Направление перемещения робота-чистителя изменяется посредством варьирования количества оборотов в минуту соответствующих приводных электродвигателей 24.
Передняя камера 32 установлена на корпусе 12 чистящего устройства и предназначена для фотографирования изображения объектов, находящихся впереди, и передачи сфотографированного изображения управляющему устройству 40. Верхняя камера 30 установлена на корпусе 12 чистящего устройства и предназначена для фотографирования изображения потолка и передачи сфотографированного изображения управляющему устройству 40. Предпочтительно в верхней камере 30 используется сверхширокоугольный объектив типа "рыбий глаз" (с угловым полем 180° и более) (не показанный). Конструкция сверхширокоугольного объектива типа "рыбий глаз" раскрыта в публикации патента Кореи 1996-7005245, публикации патента Кореи 1997-48669 и публикации патента Кореи 1994-22112. Сверхширокоугольный объектив типа "рыбий глаз" поставляется на рынок несколькими производителями объективов. Поэтому подробное описание его не приводится.
Датчики 34 для обнаружения препятствий расположены на заранее заданном расстоянии друг от друга на окружной периферии корпуса 12 чистящего устройства и предназначены для передачи сигнала во внешнее пространство и приема отраженного сигнала. В альтернативном варианте в качестве датчика 34 для обнаружения препятствий может быть использован ультразвуковой датчик, который излучает ультразвуковые волны и принимает отраженные ультразвуковые волны. Датчик 34 для обнаружения препятствий также используется для определения расстояния до препятствия. В качестве датчика (непоказанного) для определения длины перемещения, который соединен с управляющим устройством 40, может быть использован датчик для обнаружения вращения, который определяет частоту вращения ведущих колес 22 или частоту вращения вспомогательных колес 21, выраженную в оборотах в минуту. Датчик для обнаружения вращения может представлять собой кодовый датчик, который определяет частоту вращения соответствующих приводных электродвигателей 24, выраженную в оборотах в минуту.
Как показано на фиг.4, устройство 11 для генерации отрицательных ионов включает в себя прямоточный вентилятор 45, электродвигатель 47 вращательного движения, генератор 49 отрицательных ионов, выпускной канал 57, элемент 59 с решетчатой частью и множество фильтров 51. Прямоточный вентилятор 45 смонтирован на одной стороне корпуса 12 чистящего устройства и предназначен для выпуска воздуха из внутреннего пространства корпуса 12 чистящего устройства. Питание к электродвигателю 47 вращательного движения подается от блока питания (непоказанного), и электродвигатель 47 вращательного движения приводит во вращение прямоточный вентилятор 45 для сообщения вращающего усилия для выпуска воздуха из корпуса 12 чистящего устройства. Генератор 49 отрицательных ионов генерирует отрицательный ион из воздуха, который выпускается посредством прямоточного вентилятора 45. Генерированный отрицательный ион выпускается вместе с воздухом, тем самым обеспечивая очистку окружающего воздуха.
Отрицательный ион включает в себя невидимые мельчайшие частицы, которые имеют электрический заряд. Ион представляет собой атом с электрическим зарядом, который представляет собой составляющий элемент, или молекулу с электрическим зарядом, представляющую собой совокупность атомов. Отрицательный ион представляет собой ион, который имеет отрицательный заряд. В том случае, когда стабильная молекула электрически заряжается определенными частицами и тем самым электризуется, состояние молекулы называют отрицательной ионизацией. Кислород и хлор скорее всего подвергаются отрицательной ионизации. Когда электрон "отскакивает" с поверхности вещества, имеет место испускание электронов. Генератор отрицательных ионов представляет собой устройство, предназначенное для ионизации окружающих веществ путем генерирования большого количества электронов на основе этого принципа. Следовательно, за счет подачи отрицательного напряжения, составляющего приблизительно тысячу Вольт, электроны, которые несут отрицательные заряды, испускаются в воздух с высокой скоростью посредством коронного разряда, то есть за счет разрушения изоляции в воздухе, с энергией, достаточной для ионизации для ионизации воздуха отрицательными ионами.
Генератор 49 отрицательных ионов представляет собой промышленно выпускаемый и имеющийся на рынке генератор отрицательных ионов, который генерирует отрицательные ионы для очистки воздуха и обеспечивает получение свежего воздуха в пределах определенного пространства. Выпускной канал 57 представляет собой канал для выпуска воздуха в корпусе робота-чистителя. Элемент 59 с решетчатой частью присоединен к концу выпускного канала 57 и имеет множество отверстий, выполненных в нем. Воздух, проходящий по выпускному каналу 57, выпускается в заранее заданное пространство через выпускное отверстие 63, которое образовано на одной стороне крышки 14 корпуса и положение которого соответствует местоположению элемента 59 с решетчатой частью.
Как показано на фиг.5, элемент 59 с решетчатой частью может быть заземлен на корпус 12 чистящего устройства посредством заземляющего устройства 65. Это выполнено для предотвращения "прилипания" отрицательного иона, генерированного генератором 49 отрицательных ионов, к элементу 59 с решетчатой частью, когда положительный ион генерируется у элемента 59 с решетчатой частью, что могло бы привести к снижению эффективности генерирования отрицательного иона. В тех же целях поверхность выпускного отверстия 63 может быть образована из антистатического полимера при заземлении элемента 59 с решетчатой частью на корпус 12 чистящего устройства.
Множество фильтров 51 установлены с одной стороны элемента 59 с решетчатой частью и предназначены для отфильтровывания воздуха, выпускаемого по выпускному каналу 57, и включают в себя первый фильтр 53 и второй фильтр 55. Первый фильтр 53 отфильтровывает пыль из всосанного воздуха, состоящую из частиц большого размера. Второй фильтр 55 отфильтровывает тонкодисперсную пыль из частиц воздуха, прошедших через первый фильтр 53, а также устраняет запахи. Предпочтительно, если второй фильтр 55 образован из высокоэффективного сухого воздушного фильтра, предназначенного для отфильтровывания частиц, являющихся основными причинами заболеваний органов дыхания и аллергии, то есть плесени, домашней пыли, перхоти домашних животных и вирусов. В альтернативном варианте второй фильтр 55 может представлять собой обычный фильтр для устранения запахов. Фильтр для устранения запахов очищает воздух путем устранения различных запахов.
Запоминающее устройство 41 запоминает и хранит изображение потолка, сфотографированное верхней камерой 30, и содействует управляющему устройству 40 в определении данных, относящихся к местоположению робота-чистителя, или данных, относящихся к перемещению робота-чистителя. Приемопередающее устройство 43 передает передаваемые данные внешнему устройству 80 посредством приемопередатчика (непоказанного), смонтированного в управляющем устройстве 40, и передает сигнал от внешнего устройства 80, полученный приемопередатчиком (непоказанным), управляющему устройству 40. Внешнее устройство 80 предпочтительно представляет собой устройство для прокладки маршрута и передачи его по беспроводной связи. Управляющее устройство 40 обрабатывает сигнал, полученный приемопередающим устройством 43, и осуществляет управление соответствующими компонентами в соответствии с полученным сигналом. В том случае, если в корпусе 12 чистящего устройства расположено клавишное устройство ввода (непоказанное), и в этом клавишном устройстве ввода предусмотрено множество клавиш для настройки функций робота-чистителя, управляющее устройство 40 обрабатывает сигналы от клавиш, введенные посредством клавишного устройства ввода.
Управляющее устройство 40 управляет приводом 20 для обеспечения перемещения по рабочей зоне в соответствии с заранее заданной траекторией перемещения и обеспечивает занесение в запоминающее устройство 41 карты изображений потолка, полученной на основе изображения, сфотографированного верхней камерой 30. В альтернативном варианте, при получении команды, переданной посредством беспроводной связи от клавишного устройства ввода или извне, управляющее устройство 40 извлекает карту изображений перед выполнением работ по чистке. Путем использования карты изображений при выполнении задачи в процессе работы управляющее устройство 40 распознает местоположение робота-чистителя. При вводе сигнала запроса на выполнение работы, полученного посредством беспроводной связи от клавишного устройства ввода или извне, управляющее устройство 40 определяет текущее положение робота-чистителя путем сравнения карты изображений с текущими изображениями, поступающими от верхней камеры 30 и передней камеры 32, и осуществляет управление приводом 20 так, чтобы обеспечить перемещение из распознанного положения, которое соответствует траектории, в заданное место назначения. Сигнал запроса на выполнение работы включает в себя задание на выполнение чистки или мониторинга посредством камер 30, 32.
Во время перемещения вдоль заданной траектории к месту назначения управляющее устройство 40 рассчитывает погрешность длины перемещения путем использования длины перемещения, определенной кодовым датчиком, и текущего положения, которое определено путем сравнения сфотографированного изображения с хранимой картой изображений. Управляющее устройство 40 управляет приводом 20 так, чтобы обеспечить отслеживание траектории до места назначения за счет коррекции рассчитанной погрешности. Когда робот-чиститель 10 работает, управляющее устройство 40 управляет всасывающим устройством 16 и устройством 11 для генерации отрицательных ионов в соответствии с сигналом запроса на выполнение работы одновременно. В частности, прямоточный вентилятор 45 устройства 11 для генерации отрицательных ионов приводится в действие посредством питания, подаваемого от блока питания (непоказанного), предусмотренного в корпусе 12 чистящего устройства. Воздух, выпускаемый по выпускному каналу 57, очищается с помощью множества фильтров 51, и при выпуске очищенный воздух проходит через генератор 49 отрицательных ионов. Следовательно, ионизированный воздух выпускается в заранее заданную зону, подвергаемую чистке.
Кроме того, пыль или грязь, находящаяся на полу, всасывается в корпус 12 чистящего устройства посредством электродвигателя (непоказанного), предназначенного для создания всасывающей силы, и всасывающей трубы, при этом выпускается очищенный воздух. В результате в процессе перемещения по заранее заданной зоне робот-чиститель очищает пол, выпуская очищенный воздух и отрицательные ионы в воздух или выборочно, или одновременно.
Когда пользователь вводит команду во внешнее устройство 80, вызывающую прекращение работы привода 20, робот-чиститель 10 остается в определенном положении и продолжает выполнять работу по очистке пола или генерацию отрицательных ионов. При завершении работы по очистке или генерации отрицательных ионов пользователь вводит команду на прекращение работы всего устройства посредством внешнего устройства 80. Соответственно, управляющее устройство 40 робота-чистителя 10 выдает команду на прекращение выполнения рабочего задания и обеспечивает возвращение робота-чистителя 10 в исходное положение. Как описано выше, робот-чиститель 10, оснащенное генератором отрицательных ионов, автоматически перемещается по зоне, подвергаемой чистке, выполняя чистку путем всасывания за счет использования всасывающего устройства 16 и очистку воздуха путем использования устройства 11 для генерации отрицательных ионов или одновременно, или выборочно.
Как описано выше, робот-чиститель согласно настоящему изобретению выполняет чистку пола и генерирует отрицательные ионы в заранее заданной зоне при одновременном автоматическом перемещении по заранее заданной зоне. Соответственно, робот-чиститель представляет собой средство, содействующее сохранению здоровья человека и освежающее окружающую среду в доме. Кроме того, робот-чиститель согласно настоящему изобретению является экономичным, поскольку пользователю не требуется покупать отдельный генератор отрицательных ионов, и удобным в использовании благодаря автоматической работе.
Кроме того, элемент 59 с решетчатой частью выполнен из антистатического полимера и заземлен на корпус 12 чистящего устройства для сохранения элемента 59 с решетчатой частью электрически нейтральным или отрицательно заряженным в течение всего времени. Соответственно, предотвращается "прилипание" отрицательного иона, генерированного генератором 49 отрицательных ионов, к поверхности элемента 59 с решетчатой частью.
Несмотря на то, что изобретение было показано и описано со ссылкой на определенные предпочтительные варианты его осуществления, специалистам в данной области техники должно быть понятно, что могут быть выполнены различные изменения формы и деталей, не отходя от существа и объема изобретения, определяемых приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ РОБОТА-ПЫЛЕСОСА | 2004 |
|
RU2267977C1 |
| АВТОМАТИЧЕСКОЕ ЧИСТЯЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2312578C2 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2269920C2 |
| ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО ЦИКЛОННОГО ТИПА ДЛЯ ПЫЛЕСОСА | 2003 |
|
RU2253347C2 |
| РОБОТОТЕХНИЧЕСКОЕ ЧИСТЯЩЕЕ УСТРОЙСТВО И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2004 |
|
RU2263461C1 |
| РЕШЕТЧАТЫЙ УЗЕЛ ЦИКЛОННОГО ПЫЛЕУЛАВЛИВАЮЩЕГО УСТРОЙСТВА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ИСПОЛЬЗОВАНИЯ В ПЫЛЕСОСЕ, И ЦИКЛОННОЕ ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2003 |
|
RU2257833C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ОЧИСТКИ ВОЗДУХА И ЕГО СИСТЕМА | 2004 |
|
RU2267975C1 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ УВЛАЖНИТЕЛЬ ВОЗДУХА | 2005 |
|
RU2322644C2 |
| ЩЕТКА ЧИСТЯЩЕГО УСТРОЙСТВА (ВАРИАНТЫ) | 2003 |
|
RU2259799C2 |
Робот-чиститель может быть использован в качестве робота-пылесоса для очистки поверхности с получением технического результата, состоящего в осуществлении чистки пола и генерирования отрицательных ионов в заранее заданной зоне при одновременном автоматическом перемещении по заранее заданной зоне. Робот-чиститель содержит корпус, автоматически перемещающийся по зоне, подвергаемой чистке, привод для приведения в движение множества колес, смонтированных на нижней части корпуса робота-чистителя, всасывающее устройство, смонтированное в корпусе робота-чистителя и предназначенное для всасывания пыли, находящейся на полу, устройство для генерации отрицательных ионов, смонтированное в корпусе робота-чистителя, и управляющее устройство, предназначенное для управления приводом для приведения робота-чистителя в действие в соответствии с предварительно занесенной в память траекторией перемещения и предназначенное для управления работой устройства для генерации отрицательных ионов. Робот-чиститель в процессе автоматического перемещения по зоне, подвергаемой чистке, выполняет чистку посредством всасывания путем использования всасывающего устройства и очистку воздуха путем использования устройства для генерации отрицательных ионов одновременно или выборочно. Устройство для генерации отрицательных ионов содержит прямоточный вентилятор, электродвигатель вращательного движения, предназначенный для приведения прямоточного вентилятора во вращение путем использования источника питания и для выпуска воздуха в корпусе робота-чистителя, выпускной канал для выпуска воздуха из корпуса робота-чистителя, элемент с решетчатой частью, смонтированный на одном конце выпускного канала и имеющий множество отверстий, и генератор отрицательных ионов, смонтированный в элементе с решетчатой частью и предназначенный для генерации отрицательных ионов в воздухе, который выпускается из выпускного канала. 7 з.п. ф-лы, 5 ил.
Приоритет по пунктам:
| DE 10164278 A1, 31.10.2002 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Аксиально-поршневая гидромашина переменной производительности | 1986 |
|
SU1501927A3 |
| DE 4115826 A1, 21.11.1991 | |||
| ЭКРАНОПЛАН | 2005 |
|
RU2297933C1 |
| US 6171375 B1, 09.01.2001 | |||
| М. П. ЯЗИКОБ и А. К. РыковскийВсесоюзный научно-исследовательскийи экспериментально-конструкторский институткоммунального машиностроения | 0 |
|
SU254037A1 |

