Данная заявка имеет приоритет по заявке на патент Кореи № 2003-52449, поданной 29 июля 2003 г. в Ведомство интеллектуальной собственности Кореи и содержание которой включено в данную заявку в качестве ссылки.
Данная заявка относится к находящимся на совместном рассмотрении заявкам на патент Кореи №№ 10-2003-0013961, поданной 06 марта 2003 г., 10-2003-0029242, поданной 09 мая 2003 г., 10-2003-0043244, поданной 30 июня 2003 г. и 10-2003-0052451, поданной 29 июля 2003 г., содержание которых включено в данную заявку в качестве ссылки.
Настоящее изобретение относится к роботу-уборщику с функцией дезинфекции пола, в частности к роботу-уборщику, выполненному с возможностью одновременно или избирательно выполнять автоматическую уборку пола или автоматическую дезинфекцию пола.
Робот-уборщик в общем является самоходной рабочей машиной, которая перемещается логически и всасывает пыль или мелкий мусор. Робот-уборщик с помощью датчиков определяет расстояние до таких препятствий, как мебель, офисное оборудование, стены или т.п. на обрабатываемом участке. Робот-уборщик избирательно приводит в действие пару электродвигателей, чтобы избежать столкновения или контакта с препятствием, и поэтому он может автоматически изменять направление, чтобы производить уборку данного участка.
Обращаясь к фиг. 1: робот-уборщик содержит корпус 1, два ведомых колеса 2 - по одному на каждой стороне передней нижней части корпуса, два ведущих колеса 3 - по одному на каждой стороне задней нижней части корпуса, пару электродвигателей 5 для приведения в действие двух задних ведущих колес 3 и зубчатый ремень 7 привода для передачи приводного усилия на передние ведомые колеса 2. Робот-уборщик также содержит вход 9 всасывания на передней концевой части корпуса 1 для всасывания пыли или мелкого мусора. Вход 9 всасывания действует с помощью заранее определенного приводного электродвигателя (не показан).
Робот-уборщик упоминаемой выше конструкции автоматически изменяет направление движения путем избирательного приведения в действие пары электродвигателей 5, при этом действует вход 9 всасывания для уборки участка. Поскольку обычные роботы-уборщики всасывают пыль или мелкий мусор с пола через вход 9 всасывания при перемещении по обрабатываемой поверхности, они не могут дезинфицировать бактерии или вирусы, которые могут находиться на полу. Для дезинфекции поверхности пола пользователь снова обрабатывает пол влажной тканью, и такая работа может быть обременительной. Поэтому в промышленности существует пока необеспеченная необходимость решить указанные недостатки.
Соответственно, настоящее изобретение решает указанные выше проблемы известного уровня техники, и задача настоящего изобретения заключается в обеспечении робота-уборщика, выполненного с возможностью одновременно или избирательно производить автоматическую уборку пола и автоматическую дезинфекцию пола.
Для решения этой задачи обеспечен робот-уборщик, имеющий корпус, автоматически перемещающийся по обрабатываемой поверхности. Блок привода для приведения в действие совокупности колес расположен под корпусом. Датчик определения препятствия расположен спереди корпуса для определения препятствия, находящегося впереди направления движения; робот-уборщик также имеет запоминающее устройство для запоминания информации о положении препятствия, определяемого датчиком определения препятствия. Блок всасывания и сбора пыли установлен в корпусе для уборки пыли с пола. Блок дезинфекции установлен под нижней частью корпуса для дезинфекции пола. Блок управления для управления блоком привода, который осуществляет движение робота-уборщика по заданному маршруту и управляет блоком всасывания и сбора пыли и также дезинфекционным блоком. Дезинфекционный блок может работать одновременно с или отдельно от блока всасывания и сбора пыли. Дезинфекционный блок содержит дезинфекционный облучатель, приемный отсек на днище корпуса для вмещения дезинфекционного облучателя и прозрачное окно, съемным образом установленное на приемной камере и через которое дезинфекционный облучатель излучает световое излучение на пол. Дезинфекционный блок может быть установлен на одной передней части корпуса или между блоком привода и блоком всасывания и сбора пыли под днищем корпуса.
Согласно альтернативному варианту осуществления: дезинфекционный блок можно установить на задней части днища корпуса или на левой и правой сторонах днища корпуса.
Блок привода может содержать пару электродвигателей, установленных в корпусе и приводимых в действие соответственно источниками электропитания. Пара ведущих колес вращается от пары приводных электродвигателей. Пара ведомых колес следует за парой ведущих колес, и средство передачи приводит в действие ведущие и ведомые колеса. Средством передачи может быть зубчатый ремень привода.
Прочие системы, способы, признаки и преимущества настоящего изобретения будут или станут очевидными специалисту данной области техники из приводимого ниже подробного описания и прилагаемых чертежей. Подразумевается, что все эти дополнительные системы, способы, признаки и преимущества входят в данное описание, в объем настоящего изобретения и охраняются прилагаемой формулой изобретения.
Упоминаемые выше и прочие особенности, признаки и преимущества настоящего изобретения будут более очевидными при обращении к указываемым ниже чертежам. Компоненты чертежей не обязательно представлены в соответствующем масштабе, так как основное внимание при их составлении уделено задаче пояснения принципов настоящего изобретения. Аналогичные ссылочные обозначения на чертежах обозначают соответствующие детали на каждом из нескольких видов.
Фиг. 1 - вид снизу, показывающий нижнюю поверхность известного робота-уборщика.
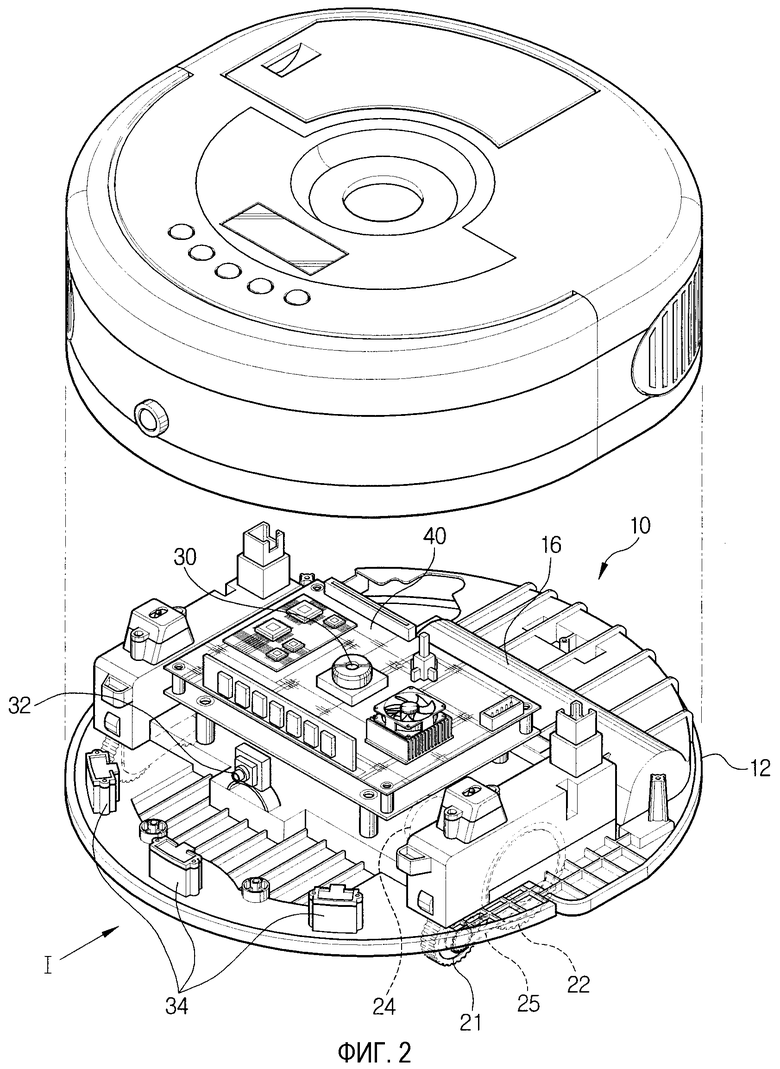
Фиг. 2 - перспективный вид, иллюстрирующий конструкцию робота-уборщика с функцией дезинфекции пола согласно осуществлению настоящего изобретения.
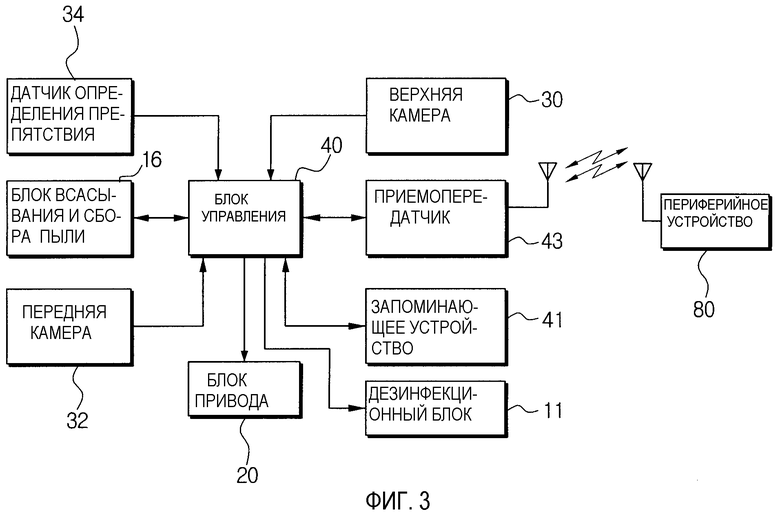
Фиг. 3 - блок-схема управления роботом-уборщиком согласно осуществлению настоящего изобретения.
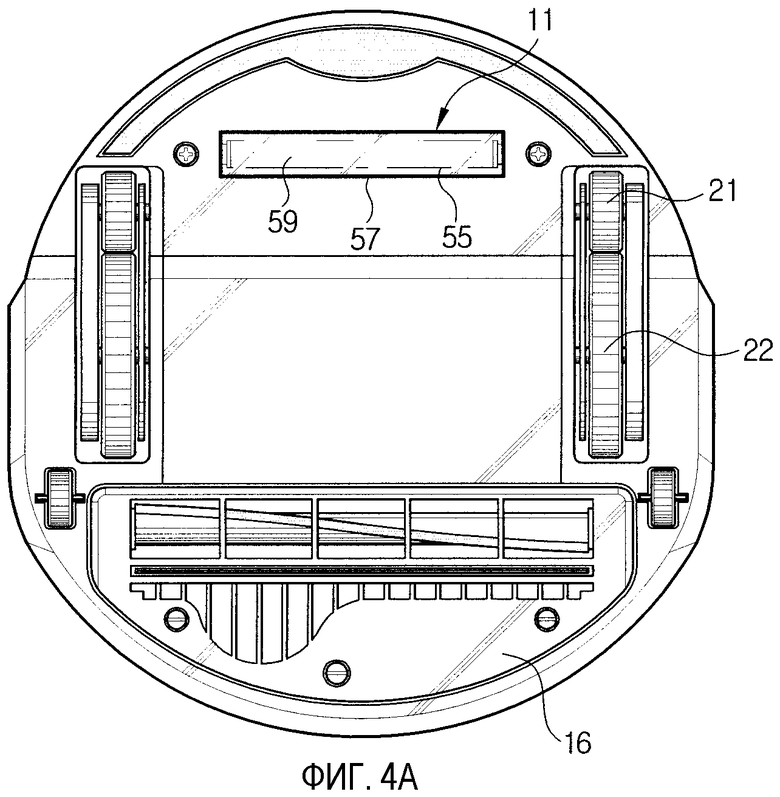
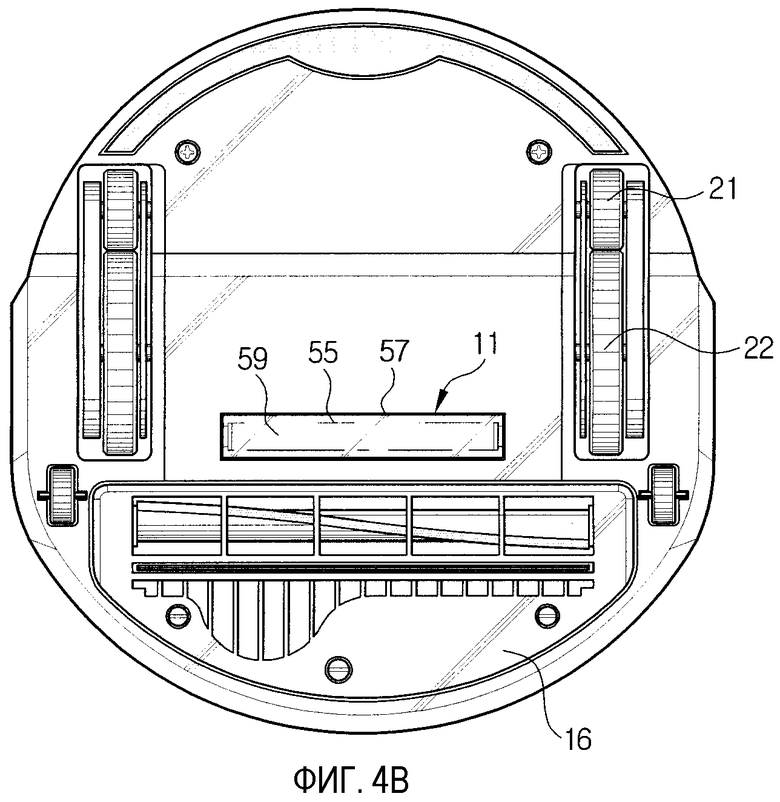
Фиг. 4А-4D - перспективы, иллюстрирующие роботов-уборщиков с функцией дезинфекции согласно осуществлению настоящего изобретения.
Далее варианты осуществления настоящего изобретения описываются со ссылкой на прилагаемые чертежи. Фиг. 2 - перспектива, иллюстрирующая конструкцию робота-уборщика с функцией дезинфекции пола согласно настоящему изобретению; и фиг. 3 - блок-схема управления роботом-уборщиком согласно настоящему изобретению. Обозначение 1 показывает переднюю часть робота-уборщика. Обращаясь к фиг. 2 и 3: робот-уборщик содержит корпус 12, блок 16 всасывания и сбора пыли, привод 20, верхнюю камеру 30, переднюю камеру 32, датчики 34 определения препятствия, блок 40 управления, дезинфекционный блок 11, запоминающее устройство 41 и приемопередатчик 43.
Блок 16 всасывания и сбора пыли установлен в корпусе 12 для всасывания пыли с пола и сбора пыли. Блок 16 всасывания и сбора пыли можно выполнить многими способами. Например, блок 16 всасывания и сбора пыли может иметь электродвигатель всасывания (не показан) и камеру-пылесборник для сбора пыли, втянутой через обращенные к полу вход или патрубок всасывания. Привод 20 имеет два ведомых колеса 21, с каждой стороны передней части корпуса, два ведущих колеса 22 с каждой стороны задней части корпуса, пару электродвигателей 24 для привода двух задних ведущих колес 22 соответственно и средство 25 передачи для передачи приводного усилия на передние ведомые колеса 21. Средство 25 передачи имеет зубчатый ремень привода, но может также иметь и зубчатую передачу.
Привод 20 вращают соответственно электродвигатели 24 вперед или назад по сигналу управления, поступающему от блока 40 управления. Направление движения определяется разным регулированием оборотов соответствующих электродвигателей 24. Передняя камера 32 установлена в корпусе 12 для фотографирования видов спереди корпуса 12 и для выведения изображений в блок 40 управления. Верхняя камера 30 установлена в корпусе для фотографирования изображений позади корпуса 12 и выведения изображений в блок 40 управления. Согласно другому осуществлению в верхней камере 30 используется сверхширокоугольный объектив (не показан). Конструкция сверхширокоугольного объектива раскрыта в находящихся на рассмотрении заявках на патент Кореи №№ 1996-7005245, 1997-48669 и 1994-22112; и сам объектив выпускают несколько изготовителей.
Датчики 34 определения препятствия установлены вокруг корпуса через определенный интервал и посылают сигнал наружу и принимают отраженный сигнал. Согласно альтернативному осуществлению датчик 34 определения препятствия может быть ультразвуковым датчиком, который испускает ультразвуковые волны и принимает отраженные ультразвуковые волны. Датчик 34 определения препятствия измеряет расстояние от корпуса 12 до препятствия или стены.
Датчик определения расстояния хода (не показан), подключенный к блоку 40 управления, может иметь датчик определения скорости вращения (не показан) для определения скорости вращения ведущих колес 22 или ведомых колес 21. Например, датчик определения скорости вращения (не показан) может иметь кодер для определения скорости вращения электродвигателя 24.
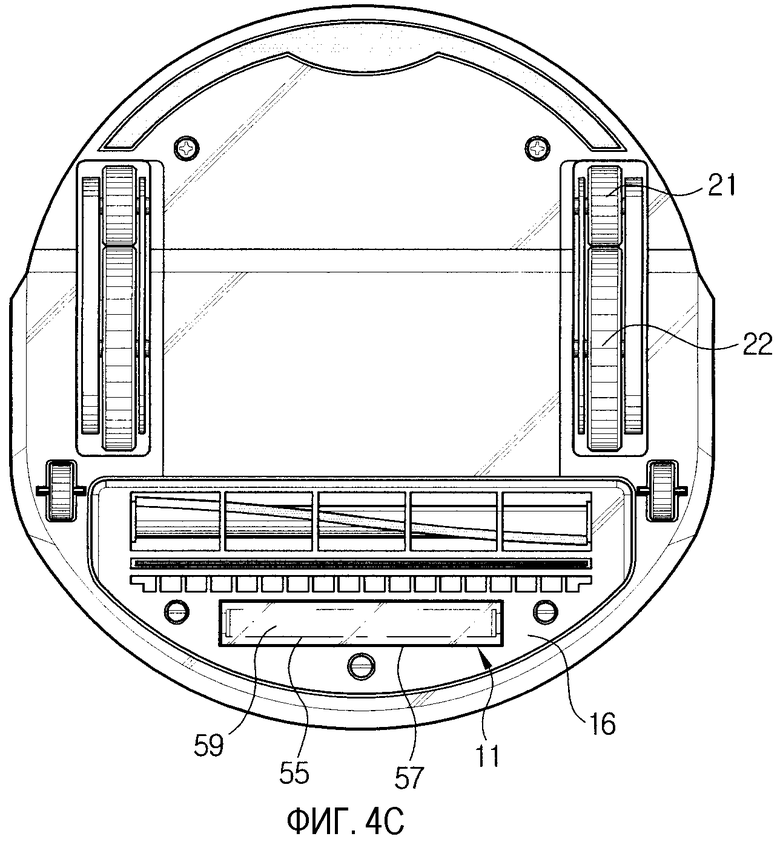
Фиг. 4А-4D показывают в перспективе роботы-уборщики с функцией дезинфекции согласно вариантам осуществления настоящего изобретения. Блок 11 дезинфекции описывается со ссылкой на фиг. 4А-4D. Блок 11 дезинфекции имеет дезинфекционный облучатель 55, приемный отсек 57 и прозрачное окно 59. Дезинфекционный облучатель 55 обычно является ультрафиолетовым дезинфекционным облучателем, выпускаемым промышленностью. Это облучатель дезинфицирует различные вирусы, имеющиеся на поверхности пола, и его подробное описание здесь не приводится.
Приемный отсек 57 является пространством, в котором помещается дезинфекционный облучатель 55, и он сформирован в углублении на нижней поверхности робота-уборщика 10. Приемный отсек 57 может быть сформирован в эллиптическом углублении, форма которого соответствует форме дезинфекционного облучателя 55. Прозрачное окно 59 съемным образом установлено на приемном отсеке 57, и через него дезинфекционный облучатель 55 излучает световое излучение на поверхность пола. Прозрачное окно также защищает дезинфекционный облучатель 55 от выступов пола или веществ, находящихся на нем.
Блок 11 дезинфекции можно установить на передней части нижней поверхности корпуса 12 (фиг. 4А) или между приводом 20 и блоком 16 всасывания и сбора пыли под нижней поверхностью корпуса 12 (фиг. 4В). Блок 11 дезинфекции можно установить на задней части нижней поверхности корпуса 12 (фиг. 4С) или на левой и правой сторонах нижней поверхности корпуса 12 (фиг. 4D). Положение установки блока 11 дезинфекции можно выбрать любым, с тем условием, чтобы дезинфекционный излучатель 55 мог излучать световое излучение на пол. Блок 11 дезинфекции может действовать одновременно с блоком 16 всасывания и сбора или независимо от блока 16 всасывания и сбора пыли. Запоминающее устройство 41 запоминает верхние изображения, фотографируемые камерой 30 для получения информации о положении или информации о движении (см. фиг. 3).
Приемопередатчик 43 передает данные в периферийное устройство 80 по передатчику и приемнику (не показаны), установленным в блоке 40 управления, и также передает сигнал от периферийного устройства 80, который принимается передатчиком и приемником (не показаны) и передается в блок 40 управления. Периферийное устройство 80 является радиоретранслятором (не показан) или дистанционным контроллером (не показан) для ввода и вывода данных. Периферийное устройство 80 может быть дистанционным контроллером. Блок 40 управления обрабатывает сигнал, принимаемый передатчиком/приемником 43, чтобы управлять каждым элементом робота-уборщика. Корпус 12 имеет блок клавишного ввода (не показан) и множество клавиш для включения функций робота-уборщика; блок 40 управления обрабатывает клавишные сигналы, введенные блоком клавишного ввода.
Блок 40 управления управляет приводом 20 для перемещения робота-уборщика в рабочем участке по схеме перемещения. Блок 40 управления также создает карту изображений для верхней области согласно изображениям, фотографируемым верхней камерой 30. Либо - при поступлении рабочей радиокоманды, принимаемой от блока клавишного ввода или от дистанционного устройства, - этот блок может создать карту изображений до того, как приступит к уборке.
После создания карты изображений блок 40 управления воспринимает свое положение с помощью карты изображений. В частности, если радиосигнал запроса произвести уборку принят блоком клавишного ввода или дистанционным устройством, то блок 40 управления воспринимает текущее положение робота-уборщика путем сравнения запомненной карты изображений с текущим изображением, введенным верхней камерой 30, или верхней камерой 30 и передней камерой 32, и таким образом управляет приводом 20 в соответствии с нужным маршрутом хода, исходя из воспринимаемого положения. Сигнал запроса произвести уборку включает в себя сигнал произвести уборку или сигнал контролирования с помощью камер 30 и 32.
При перемещении робота-уборщика по нужному маршруту хода блок управления вычисляет ошибку хода по расстоянию хода, измеряемому кодером, по воспринимаемому текущему положению и путем сравнения запомненной карты изображений с текущим изображением; и компенсирует ошибку, чтобы привод 20 мог обеспечивать нужный маршрут хода.
Во время перемещения робота-уборщика 10 блок 40 управления одновременно или избирательно приводит в действие блок 16 всасывания и сбора пыли и блок 11 дезинфекции согласно сигналу произвести уборку.
Соответственно, дезинфекционный облучатель 55 блока 11 дезинфекции запитывается от источника электропитания (не показан), установленного в корпусе 12. Пыль и мелкий мусор с пола втягиваются в корпус 12 с помощью электродвигателя всасывания (не показан) и патрубка всасывания, и воздух выходит из него очищенным. Таким образом робот-уборщик одновременно или избирательно очищает и дезинфицирует пол.
Если пользователь вводит сигнал для остановки работы привода 20 в периферийное устройство 80, то робот-уборщик 10 может одновременно или избирательно выполнять уборку и дезинфекцию пола, не двигаясь и оставаясь в нужном местоположении. По завершении уборки или дезинфекции, если пользователь вводит команду остановки работы робота-уборщика через периферийное устройство 80, блок 40 управления робота-уборщика 10 останавливает уборку и дезинфекцию и возвращает робот-уборщик 10 в его исходное положение.
Как указано выше, робот-уборщик с функцией дезинфекции согласно настоящему изобретению выполнен с возможностью одновременного или избирательного выполнения уборки и дезинфекции пола при перемещении в заданном пространстве. Хотя настоящее изобретение иллюстрируется и описывается со ссылкой на его определенные варианты осуществления, специалистам в данной области техники будет ясно, что в него можно ввести различные изменения по форме и частностям в рамках идеи и объема изобретения, определяемых в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ВОЗДУХООЧИСТИТЕЛЬ И ЕГО СИСТЕМА | 2004 |
|
RU2264155C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ОЧИСТКИ ВОЗДУХА И ЕГО СИСТЕМА | 2004 |
|
RU2267975C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| РОБОТ-УБОРЩИК И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2006 |
|
RU2313269C2 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| РОБОТ-ЧИСТИТЕЛЬ, ОСНАЩЕННЫЙ ГЕНЕРАТОРОМ ОТРИЦАТЕЛЬНЫХ ИОНОВ | 2004 |
|
RU2279244C2 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |

Робот-уборщик обеспечивает одновременную и избирательную автоматическую уборку и автоматическую дезинфекцию пола. Робот-уборщик содержит корпус, автоматически перемещающийся по обрабатываемой поверхности, привод для привода совокупности колес, установленный внизу корпуса, и датчики определения препятствия, установленные на передней части корпуса, для определения препятствия, находящегося впереди по направлению перемещения. Робот-уборщик также содержит запоминающее устройство для запоминания информации о положении препятствия, определяемого датчиком определения препятствия, блок всасывания и сбора пыли, установленный в корпусе и выполненный с возможностью всасывания пыли с пола, и блок дезинфекции, установленный под нижней частью корпуса для осуществления дезинфекции пола. Робот-уборщик также содержит блок управления для управления блоком привода для перемещения робота-уборщика по заданному маршруту и для управления блоком всасывания и сбора пыли и блоком дезинфекции. Блок дезинфекции действует одновременно с или отдельно от блока всасывания и сбора пыли. 7 з.п. ф-лы, 4 ил.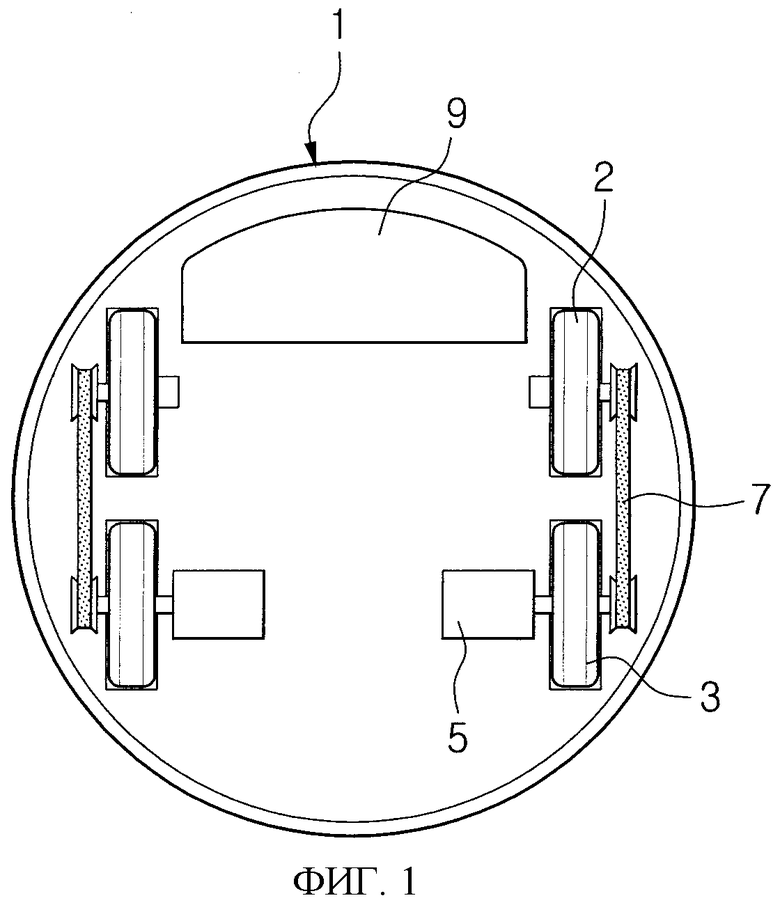
| US 5815880 А, 06.10.1998 | |||
| DE 3803825 A1, 17.08.1989 | |||
| US 5233723 A, 10.08.1993 | |||
| DE 10157016 A1, 27.03.2003 | |||
| Бактерицидный пылесос Курихина В.И. | 1989 |
|
SU1729480A1 |

