Изобретение относится к области машиностроения и может быть использовано в системах защиты от перегрузок и повреждения стреловых грузоподъемных кранов и кранов-трубоукладчиков.
Известен способ настройки ограничителя грузоподъемности (прибора безопасности) стрелового крана путем подъема предельных инвентарных грузов при начальном и конечном вылетах стрелы и последовательного уравнивания сигналов, пропорциональных предельному инвентарному грузу и расчетному грузу при упомянутых вылетах, фиксации при начальном вылете сигналов, пропорциональных предельному инвентарному и расчетному грузам, а при уравнивании сигналов при начальном вылете, замене сигналов, пропорциональных предельному инвентарному и расчетному грузам, на указанные фиксированные сигналы [1].
Недостатком этого способа является необходимость многократного подъема грузов при начальном и конечном вылетах, что приводит к большой трудоемкости настройки.
Известен также способ настройки грузового момента путем двух контрольных замеров грузоподъемности крана в двух крайних положениях его стрелы, установки первого и второго наладочного грузов на общую вертикаль во время первого замера изменением их угловых положений, фиксации этих угловых положений относительно продольной оси рычага, перемещения вдоль рычага в расчетное положение первого груза совместно со вторым и регулировки усилия пружины до срабатывания конечного выключателя, а также прямолинейного перемещения, во время второго замера, второго груза относительно первого до повторного срабатывания конечного выключателя, и фиксации при этом второго груза относительно первого [2].
Данное техническое решение обеспечивает более точное соответствие характеристики отключения прибора безопасности грузовой характеристике крана. Однако ввиду большого количества механических регулировок трудоемкость настройки прибора безопасности на кране остается высокой.
Известен также способ настройки прибора безопасности грузоподъемного крана путем подъема тарированных грузов заданной массы в двух точках грузовой характеристики крана (при минимальном и максимальном вылете) и механического регулирования положения датчиков измерения нагрузки и вылета из условия обеспечения соответствия характеристики отключения прибора безопасности заданной грузовой характеристике крана [3].
Недостатком этого технического решения также является высокая трудоемкость настройки прибора безопасности на кране ввиду большого количества механических регулировок. Кроме того, замена любой составной части прибора безопасности ввиду неизбежных погрешностей при ее установке требует проведения повторной настройки, т.е. не обеспечивается взаимозаменяемость составных частей прибора безопасности.
Более совершенным и наиболее близким к предложенному является реализованный в приборе безопасности типа ОНК-140 способ настройки прибора безопасности грузоподъемного крана путем подъема тарированного груза заданной массы в точках грузовой характеристики с известными параметрами стрелового оборудования (длина стрелы, угол наклона стрелы или вылет), а также регулирования сигналов в каналах измерения нагрузки и вылета (угла наклона стрелы) из условия обеспечения соответствия характеристики отключения прибора безопасности заданной грузовой характеристике крана, причем регулирование сигналов в каналах измерения нагрузки осуществляется потенциометрами, а регулирование сигнала в канале измерения вылета (угла наклона стрелы) - путем механической регулировки углового положения датчика угла наклона стрелы [4].
Недостатком известного способа-прототипа является высокая трудоемкость настройки прибора безопасности на кране ввиду наличия механических регулировок датчиков. При этом регулирование сигналов в каналах измерения нагрузки потенциометрами приводит к дополнительному усложнению регулировок, поскольку дополнительно возникает необходимость вскрытия защитных крышек, нарушения пломбирования электронного блока и т.д.
Кроме того, не обеспечивается взаимозаменяемость составных частей прибора безопасности. Например, при замене датчика углового положения стрелы автоматически необходимо проводить регулировку прибора безопасности, поскольку из-за наличия регулировочных пазов в узлах крепления установить новый датчик в то же самое угловое положение не представляется возможным. А при смене электронного блока (блока обработки данных) также необходимо повторно проводить регулировку, поскольку настроечные потенциометры находятся в этом блоке.
Недостатком известного способа является также невозможность настройки (привязки) прибора безопасности на любом типе грузоподъемного крана с произвольной установкой датчика (датчиков) в канале измерения нагрузки. Если, например, прибор безопасности рассчитан на установку датчика измерения нагрузки в оттяжке стрелового каната, то, в случае переноса этого датчика в грузовой канат, настройка прибора безопасности становится невозможной, поскольку в этом случае требуется изменение программы электронного блока (блока обработки данных).
Задачами, на решение которых направлено предложенное техническое решение, являются:
- уменьшение трудоемкости настройки прибора безопасности на грузоподъемном кране за счет исключения механических регулировок;
- обеспечение взаимозаменяемости составных частей прибора безопасности с учетом неточности их установки на кране;
- обеспечение настройки (привязки) прибора безопасности на любом типе грузоподъемного крана с произвольной установкой датчика (датчиков) в канале измерения нагрузки.
В предложенном способе настройки прибора безопасности грузоподъемного крана путем подъема тарированного груза заданной массы в точках грузовой характеристики с известными параметрами стрелового оборудования (длина стрелы, угол наклона и(или) вылет стрелы), регулирования сигналов в каналах измерения нагрузки, вылета и(или) угла наклона стрелы из условия обеспечения соответствия характеристики отключения прибора безопасности заданной грузовой характеристике крана поставленная цель достигается тем, что указанное регулирование сигналов осуществляют путем их сложения с настроечными параметрами и(или) умножения на настроечные параметры, значения которых предварительно определяют и сохраняют в энергонезависимой памяти прибора безопасности. При этом настроечные параметры могут быть представлены в виде функций параметров стрелового оборудования крана, например вылета, и сохраняться не менее чем в двух составных частях прибора безопасности, а после замены каждой составной части прибора безопасности перезаписываться в замененную составную часть из незамененной. Значения настроечных параметров могут также считываться одновременно со считыванием данных встроенного регистратора параметров прибора безопасности для их последующей записи в энергонезависимую память заменяемых составных частей прибора безопасности.
В части настройки (привязки) прибора безопасности на любом типе грузоподъемного крана с произвольной установкой датчика измерения нагрузки поставленная цель достигается также тем, что при подъеме тарированного груза заданной массы выявляют приращение выходного сигнала канала измерения нагрузки, после чего определяют величину выходного сигнала канала измерения нагрузки, соответствующую отключению крана, путем умножения этого приращения на отношение максимальной грузоподъемности крана в данной точке грузовой характеристики с известными параметрами стрелового оборудования к весу указанного тарированного груза и суммирования, при необходимости, выходного сигнала канала измерения нагрузки при нулевой массе поднимаемого груза. При этом величину выходного сигнала канала измерения нагрузки, соответствующую отключению крана в различных точках грузовой характеристики крана, получают путем аппроксимации значений этого сигнала, полученных в точках грузовой характеристики с известными параметрами стрелового оборудования крана.
На фиг.1 указаны геометрические размеры грузоподъемного крана (крана-трубоукладчика), а на фиг.2 приведены функциональные зависимости, поясняющие суть предложенного способа настройки.
Устройство для реализации предложенного способа настройки представляет собой микропроцессорный прибор безопасности грузоподъемного крана (без каких-либо дополнительных устройств). Устройство содержит микропроцессорный электронный блок (блок обработки данных, блок индикации и т.п.), исполнительный блок и датчики рабочих параметров грузоподъемного крана. Электронный блок может быть выполнен в виде цифровой вычислительной машины и подключенных к ней органов управления, индикаторов, блока памяти и устройства ввода-вывода информации, которое подключено к входам исполнительного блока и к датчикам рабочих параметров.
Каждый из датчиков рабочих параметров (угла наклона, длины стрелы, силы или давления, азимута и т.д.) содержит последовательно соединенные чувствительный элемент (первичный преобразователь), схему преобразования выходного сигнала первичного преобразователя, микроконтроллер со встроенным энергонезависимым запоминающим устройством (EEPROM) и интерфейсную схему. Соединения датчиков рабочих параметров с электронным блоком могут быть выполнены по радиальной схеме при помощи отдельных проводов или по мультиплексной линии связи. В последнем случае интерфейсные схемы датчиков рабочих параметров выполнены на основе драйверов или контроллеров соответствующей линии связи - CAN, LIN и т.п.
Принцип работы прибора безопасности грузоподъемного крана известен, описан, в частности в [4], в заявке RU 2002109339 А, В 66 С 15/00, 10.12.2002 и в настоящей заявке рассматривается только в той части, которая касается пояснения сути предложенного способа настройки.
Рассмотрим суть предложенного способа на примере настройки прибора безопасности на кране-трубоукладчике. На других типах грузоподъемных кранов настройка происходит аналогичным образом с учетом особенностей, связанных с конструкцией конкретного крана.
Датчик угла наклона стрелы, на основании выходного сигнала которого определяется вылет R, устанавливается на стреле крана-трубоукладчика. Предположим, что стрела имеет угол наклона относительно горизонта α. Этот датчик обычно устанавливается на элементы крепления, например бонки, приваренные к стреле. Из-за погрешности монтажа (приварки) элементов крепления Δα действительное значение выходного сигнала датчика угла наклона стрелы будет не α, а (α+Δα).
Из фиг.1 следует, что вылет R и максимальная высота подъема крюка Н определяются выражениями:

Н=Lстр*Sin(α+Δα)+Нш-Нкр,
где R - вылет крюка;
Н - максимальная высота подъема крюка;
Lстр - расстояние от оси крепления стрелы к трубоукладчику до оголовка стрелы;
α - угол наклона стрелы;
Δα - погрешность установки датчика угла наклона стрелы;
Lш - расстояние от оси крепления стрелы к трубоукладчику до ребра опрокидывания;
Нш - расстояние от оси крепления стрелы к трубоукладчику до поверхности земли;
Нкр - расстояние от оси крепления подвесного блока полиспастной системы до центра крюка.
Микропроцессорному электронному блоку (блоку обработки данных, блоку индикации и т.п.) для вычисления значения вылета R и максимальной высоты подъема крюка В необходимы параметры: Lстр, Lш, Нш, Нкр, α и Δα.
В соответствии с предложенным способом настройки геометрические размеры Lстр, Lш, Нш и Нкр предварительно определяются, например, по паспортным характеристикам крана-трубоукладчика или измеряются, например, рулеткой и сохраняются в энергонезависимой памяти микропроцессорного блока. Величина α является выходным сигналом датчика угла наклона стрелы.
Поэтому для настройки прибора безопасности необходимо определение и сохранение в энергонезависимой памяти настроечного параметра Δα - погрешности установки датчика наклона стрелы.
Из выражения (1) следует, что

Δα=Arccos[(R-Lш)/Lстр]-α.
Поэтому в процессе настройки прибора безопасности непосредственно на кране (на кране-трубоукладчике) при помощи рулетки или дальномера измеряется вылет R, электронный блок переключается в режим настройки, измеренное значение вылета R вводится в электронный блок с входящих в его состав органов управления (клавиатуры) или путем перезаписи из памяти электронного дальномера. Далее электронный блок, работая по заложенной в его памяти программе, по зависимости (2) вычисляет значение Δα и сохраняет его в энергонезависимой памяти прибора безопасности.
В случае, когда датчик угла наклона имеет отклонение по коэффициенту передачи (по чувствительности) или установлен таким образом, что измеряет неполное значение угла наклона стрелы, выражение (1) в части определения вылета принимает вид

где К - неизвестный параметр, требующий определения в процессе настройки.
Для его определения осуществляется измерение вылета при двух различных углах наклона стрелы. Полученные данные при различных вылетах подставляются в уравнение (3), в результате чего получается система двух уравнений с двумя неизвестными: К и +Δα. Микропроцессорный электронный блок осуществляет решение этой системы уравнений известными методами и получает значения настроечных параметров К и Δα, которые сохраняются в энергонезависимой памяти и используются при последующих вычислениях.
Если канал измерения нагрузки уже настроен, то на этом настройка прибора безопасности заканчивается. Микропроцессорный электронный блок после его переключения из режима настройки в рабочий режим, используя предварительно определенное и сохраненное в энергонезависимой памяти значение Δα (и, при необходимости, значение параметра К), по формуле (1) (или (3)) определяет действительное значение вылета R и далее проверяет отсутствие перегрузки крана при вычисленном значении вылета путем сопоставления текущего значения нагрузки с максимально допустимым согласно грузовой характеристике крана.
Если же канал измерения нагрузки не настроен, то сначала по описанной процедуре производится настройка канала вылета R. А затем, когда значения вылета R известны, т.е. вычисляются по формуле (1) или (3) при всех значениях угла наклона стрелы (при известных параметрах стрелового оборудования), осуществляется настройка канала измерения нагрузки. В соответствии с предложенным способом это производится следующим образом.
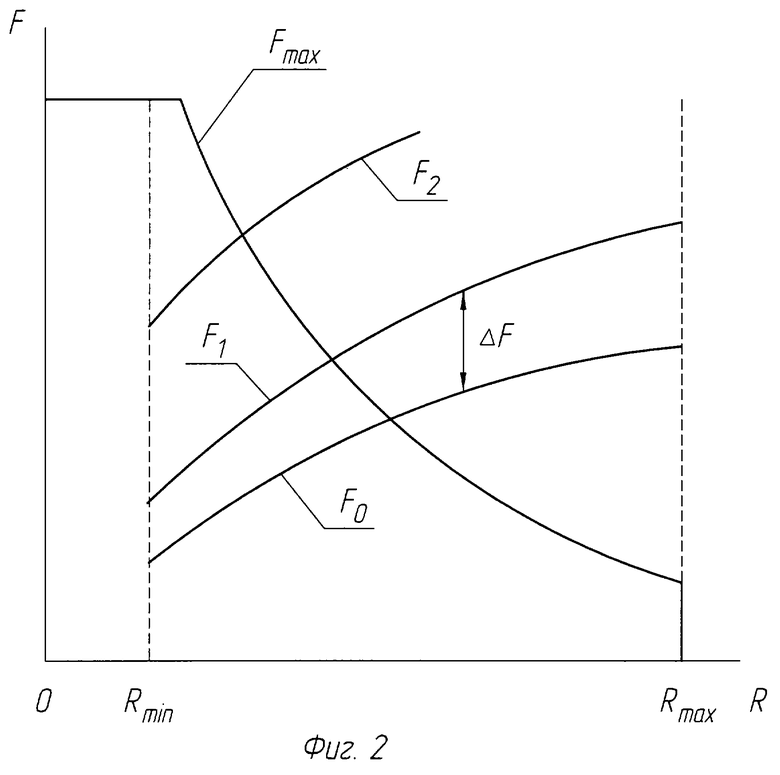
Грузовая характеристика крана представлена зависимостью максимальной нагрузки FMAX от вылета R (см. фиг.2). При изменении вылета R от минимального RMIN до максимального RMAX значения величина FMAX снижается по определенной зависимости, приведенной в паспорте крана. Эта зависимость предварительно заносится в память микропроцессорного электронного блока прибора безопасности в ручном режиме (его органов управления) или при программировании микросхем (микроконтроллера или микросхем памяти). При необходимости в ручном или автоматизированном режимах вводятся отдельные точки грузовой характеристики и в микропроцессорном электронном блоке проводится их аппроксимация.
В предложенном техническом решении допускается произвольная установка датчика нагрузки - в стреловом канате, в грузовом канате, в шарнире стрелы и т.д. Причем в качестве датчика нагрузки может быть использован датчик силы, датчик давления или комбинация датчиков силы и давления с различными весовыми коэффициентами (например, датчики давления в штоковой и поршневой полостях гидроцилиндра подъема стрелы крана). Соответственно, при изменении вылета величина выходного сигнала датчика (канала) измерения нагрузки будет изменяться по некоторой зависимости. Без груза на крюке, с учетом собственного веса стрелового оборудования, эта зависимости имеет, например, вид, представленный на фиг.2 кривой F0. Эта зависимость может быть возрастающей, спадающей и т.д., что при использовании предложенного способа не имеет принципиального значения.
При подъеме тарированного груза заданной массы m01 нагрузка на датчик возрастает и зависимость его выходного сигнала от вылета R принимает вид, показанный на фиг.2, F1.
Соответственно, приращение выходного сигнала канала измерения нагрузки при подъеме тарированного груза заданной массы m01 в точках грузовой характеристики с известными параметрами стрелового оборудования имеет вид

Очевидно, что при фиксированном положении стрелового оборудования крана, зависимость приращения ΔF от веса поднимаемого тарированного груза является линейной. Поэтому величина выходного сигнала нагрузки F, соответствующая максимальной нагрузке FMAX, является функцией вылета F=F(R) и определяется зависимостью

В частном случае, когда, например, датчик нагрузки установлен в грузовом канате, и при отсутствии поднимаемого груза нагрузка на датчик отсутствует, величина F0 равна нулю (F0=0). Т.е. суммирование выходного сигнала канала измерения нагрузки при нулевой массе поднимаемого груза осуществляется только в случае необходимости.
Для повышения точности настройки при малых вылетах может применяться подъем тарированного груза повышенной массы m02. В этом случае зависимость выходного сигнала датчика от вылета R принимает вид, показанный на фиг.2, F2, а в формуле (5) используется не масса m01, а масса m02. В остальном процедура настройки и производимые вычисления остаются прежними.
Из формулы (5) ясны суть предложенного способа в части настройки канала измерения нагрузки и алгоритм настройки - последовательно изменяя положение стрелового оборудования в диапазоне от минимального вылета RMIN до максимального RMAX фиксируют и сохраняют в энергонезависимой памяти прибора безопасности зависимости параметров F0 и ΔF в виде функций вылета R. Это можно сделать как при непрерывном изменении вылета, так и в фиксированных точках с последующей аппроксимацией полученных значений в промежуточных точках грузовой характеристики крана. При этом запись в энергонезависимую память может осуществляться в автоматическом режиме (при работе прибора безопасности в режиме настройки), например, с определенным периодом, либо по нажатию кнопок (органов) управления на микропроцессорном электронном блоке.
Далее, когда все значения настроечных коэффициентов (параметров) Δα, F0(R), ΔF(R) и FMAX(R) определены и сохранены в энергонезависимой памяти прибора безопасности, микропроцессорный электронный блок, работая по программе, по зависимостям (1) и (5) вычисляет вылет R, а также значение выходного сигнала датчика (канала) измерения нагрузки F(R), соответствующего максимальной нагрузке FMAX при данном вылете R. После этого микропроцессорный электронный блок, осуществляя сравнение текущего значения выходного сигнала канала (датчика) нагрузки Fвых с вычисленным значением F(R), разрешает работу грузоподъемного крана или осуществляет его отключение по перегрузке.
При этом настройка осуществляется без механической регулировки каких-либо настроечных элементов, что существенно снижает трудоемкость настройки прибора безопасности.
Датчики рабочих параметров могут быть выполнены с калиброванными установочными размерами. Однако практически невозможно идентично выполнить элементы их крепления на кране. Поэтому получаемые настроечные параметры (например, Δα) на различных кранах будут различными. Поэтому, если настроечные параметры сохраняются в микропроцессорном электронном блоке, то при замене этого блока настроечные параметры теряются и приходится производить настройку прибора безопасности на кране заново. Если же настроечные параметры сохранять в энергонезависимой памяти (в EEPROM) микроконтроллеров датчиков рабочих параметров, то аналогичным образом при замене датчиков также приходится заново производить настройку прибора безопасности. Т.е. в любом случае не обеспечивается взаимозаменяемость составных частей прибора безопасности.
Для достижения поставленной цели в части обеспечения взаимозаменяемости составных частей прибора безопасности в предложенном способе дополнительно осуществляется запись одних и тех же настроечных параметров в энергонезависимую память одновременно не менее чем двух составных частей прибора безопасности, например, как в датчик угла наклона стрелы (в датчик силы, в датчик азимута и т.д.), так и в микропроцессорный электронный блок. В этом случае после замены каждой составной части прибора безопасности осуществляют перезапись в нее настроечных параметров, которые считывают из незамененной составной части. В первоначальном состоянии всех составных частей прибора безопасности (при первой установке на грузоподъемный кран) содержимое их энергонезависимой памяти (EEPROM), в которой должны храниться настроечные параметры, устанавливается, например, равным нулю. После вычисления настроечного параметра, например Δα, этот параметр записывается в энергонезависимую постоянную память микропроцессорного электронного блока. После этого, микропроцессорный электронный блок, соединенный с датчиком угла по мультиплексной линии связи или отдельными проводами, передает в микроконтроллер датчика угла наклона стрелы значение параметра Δα, которое сохраняется в его EEPROM. Эта передача может осуществляться автоматически после записи настроечного параметра в микропроцессорный электронный блок. Конкретный формат передачи этого параметра по линии связи определяется спецификацией использующегося интерфейса связи микропроцессорного электронного блока с датчиками CAN, LIN и т.д. и не имеет принципиального значения. Микроконтроллер датчика, получив настроечный параметр, работая по программе, сохраняет этот параметр в своей энергонезависимой памяти (EEPROM).
Таким образом, осуществляется дублирование записи и сохранения настроечных параметров в различных составных частях прибора безопасности. Причем это дублирование распространяется не только на параметр Δα, но и на все настроечные параметры, включая те, которые представлены в виде функции параметров стрелового оборудования (вылета стрелы и т.д.), например параметры F0(R), ΔF(R) и т.д. Причем какие настроечные параметры сохраняются в каких составных частях прибора безопасности не имеет принципиального значения и может быть выбрано произвольно. Существенно только то, что каждый настроечный параметр сохраняется не менее чем в двух составных частях прибора безопасности.
При первом включении напряжения питания или по специальной команде, подаваемой вручную с органов управления микропроцессорного электронного блока, этот блок осуществляет считывание и сопоставление настроечных параметров со всех составных частей прибора безопасности. Если при этом выяснится, что в какой-то составной части запись настроечных параметров отсутствует (данные имеют нулевое значение), то микропроцессорный электронный блок автоматически осуществляет их запись.
В итоге при замене любой составной части прибора безопасности значение настроечных параметров сохраняется. Благодаря этому и обеспечивается достижение поставленной цели, а именно взаимозаменяемость всех составных частей прибора безопасности.
В случае, если в данной конструкции прибора безопасности отсутствует техническая возможность хранения настроечных параметров в его нескольких составных частях, настроечные параметры записываются и хранятся только в микропроцессорном электронном блоке. В этом случае, согласно предложенному способу, осуществляется считывание настроечных параметров одновременно со считыванием данных встроенного регистратора параметров прибора безопасности (особенности устройства и эксплуатации регистратора параметров определены требованиями РД 10-399-01 Госгортехнадзора России).
После считывания настроечных параметров они записываются в энергонезависимую память заменяемой составной части прибора безопасности до ее установки на кран. Эта запись осуществляется в ручном режиме (с органов управления микропроцессорного электронного блока) или при программировании микросхем (микроконтроллера или микросхем памяти) до установки заменяемой составной части прибора безопасности на кран. В этом случае настройки прибора безопасности на грузоподъемном кране не требуется, что также обеспечивает достижение поставленной цели - взаимозаменяемости всех составных частей прибора безопасности.
С учетом вышеизложенного следствием реализации отличительных признаков заявленного технического решения является уменьшение трудоемкости настройки прибора безопасности на грузоподъемном кране, обеспечение взаимозаменяемости всех его составных частей, а также возможность настройки (привязки) прибора безопасности на любом типе грузоподъемного крана с произвольной установкой датчика нагрузки.
Источники информации
1. Авторское свидетельство СССР №592721, МПК2 В 66 С 15/06, 15.02.1978.
2. Патент России RU 2053192 С1, МПК6 В 66 С 23/90, 27.01.1996.
3. Сушинский В.А., Маш Д.М., Шишков Н.А. Приборы безопасности грузоподъемных кранов. Часть 1. - М.: Центр учебных и информационных технологий, 1996, стр.17.
4. Ограничитель нагрузки крана ОНК-140. Инструкция по монтажу, пуску и регулированию. ЛГФИ. 408844.009 ИМ. - Арзамас: ОАО «Арзамасский приборостроительный завод», 2002. - 24 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2290361C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2005 |
|
RU2282577C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРОВ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНЫХ КРАНОВ СТРЕЛОВОГО ТИПА С ОДИНАКОВЫМ КРАНОВЫМ ОСНАЩЕНИЕМ | 2009 |
|
RU2381173C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
Изобретение относится к технике защиты от перегрузок и повреждения стреловых грузоподъемных кранов и кранов-трубоукладчиков. Настройку производят путем подъема тарированного груза заданной массы в точках грузовой характеристики с известными параметрами стрелового оборудования, а также регулирования сигналов в каналах измерения нагрузки, вылета и/или угла наклона стрелы из условия обеспечения соответствия характеристики отключения прибора безопасности заданной грузовой характеристике крана. В процессе регулирования сигналов в каналах измерения нагрузки, вылета и/или угла наклона стрелы значения выходных сигналов соответствующих датчиков сохраняют неизменными, а упомянутое регулирование осуществляют путем сложения и/или перемножения выходных сигналов датчиков с сигналами, соответствующими настроечным параметрам. Значения последних предварительно определяют и сохраняют в энергонезависимой памяти прибора безопасности. Предложенный способ позволяет уменьшить трудоемкость настройки прибора безопасности на грузоподъемном кране, обеспечивает взаимозаменяемость всех его составных частей, а также дает возможность настройки прибора на любом типе грузоподъемного крана с произвольной установкой датчика нагрузки. 5 з.п. ф-лы, 2 ил.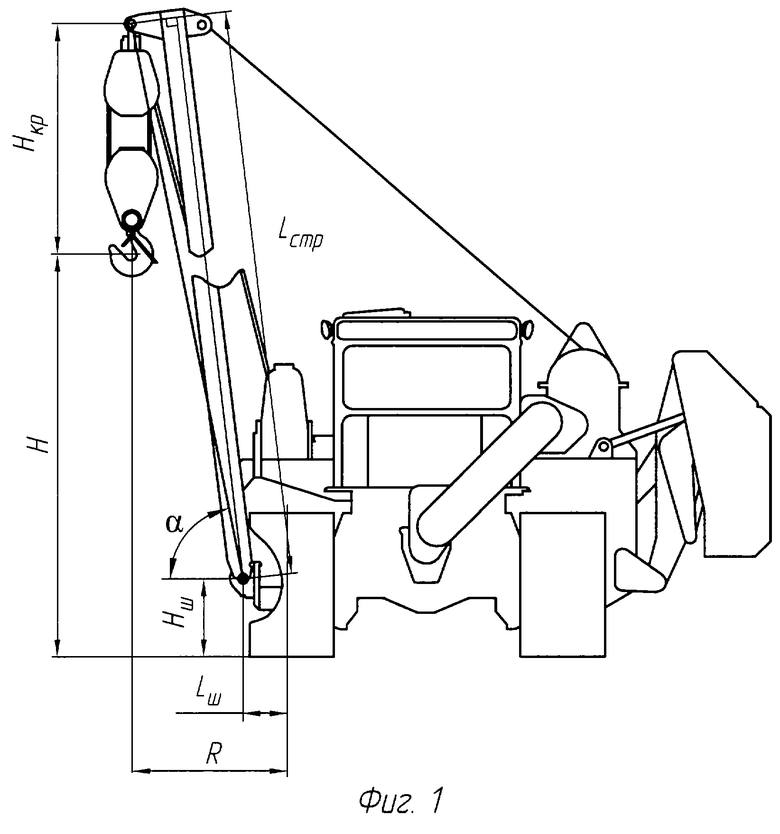
| Способ закалки пил | 1915 |
|
SU140A1 |
| УСТРОЙСТВО для РАЗБОРКИ ГУСЕНИЧНОЙ ЦЕПИ | 0 |
|
SU408844A1 |
| - Арзамас, ОАО «Арзамасский приборостроительный завод», 2002 | |||
| СПОСОБ НАСТРОЙКИ ОГРАНИЧИТЕЛЯ ГРУЗОВОГО МОМЕНТА | 1993 |
|
RU2053192C1 |
| Способ настройки электромеханического ограничителя грузоподъемности стрелового крана | 1981 |
|
SU1025652A1 |
| DE 3341287 A1, 07.06.1984. | |||

