Изобретение относится к области машиностроения и может использоваться в машинах, имеющих тяжелые рабочие органы, например в лебедках с канатными барабанами или в смесителях с тяжелой вращающейся рабочей емкостью.
Одной из проблем приводов вращения рабочих органов крупногабаритных машин является обеспечение высокой точности взаимного расположения опор рабочего органа при традиционных технических решениях узла соединения силового агрегата привода, например мотор-редуктора, с этим рабочим органом. Известны решения этой проблемы, основанные на обеспечении самоустанавливаемости корпуса силового агрегата, выходное звено которого кинематически жестко связано с рабочим органом. Например, известен привод канатного барабана, силовой агрегат которого (редуктор) соединяется со станиной машины зубчатым карданом (Решетов Л.Н. Самоустанавливающиеся механизмы: Справочник - М.: Машиностроение, 1979, с.278).
Недостатком этого технического решения является сложность конструкции зубчатого кардана.
Наиболее близким к предложенному изобретению является привод рабочего органа крупногабаритной машины, в котором силовой агрегат (редуктор) соединен с платформой крана двумя кинематическими парами третьего и первого класса (Решетов Л.Н. Самоустанавливающиеся механизмы: Справочник - М.: Машиностроение, 1979, с.278-279, рис.6.2). У этого технического решения, при достаточно простой конструкции, ограничены возможности самоустанавливаемости при значительных отклонениях от точности взаимного расположения опорных узлов (вся лебедка бракуется при относительных перемещениях в одной их опорных кинематических пар свыше 2,5 мм).
Задача изобретения - обеспечение самоустанавливаемости силового агрегата привода при сохранении простоты конструкции.
Задача решается путем того, что в приводе вращения рабочего органа крупногабаритной машины, содержащем рабочий орган, привод его вращения, включающий силовой агрегат в виде двигателя и выходное звено, выполненное с возможностью соединения с рабочим органом машины, и элементы крепления корпуса силового агрегата к станине машины, согласно изобретению элементы крепления корпуса силового агрегата к станине машины представляют собой, по меньшей мере, три сферических шарнира и соединительное звено, причем один из сферических шарниров установлен непосредственно между корпусом силового агрегата и станиной машины, а два других размещены между корпусом силового агрегата и станиной машины с взаимодействием друг с другом через соединительное звено.
Задача решается также путем того, что в приводе вращения рабочего органа крупногабаритной машины, содержащем рабочий орган, привод его вращения, включающий силовой агрегат в виде двигателя и выходное звено, выполненное с возможностью соединения с рабочим органом машины, и элементы крепления корпуса силового агрегата к станине машины, согласно изобретению элементы крепления корпуса силового агрегата к станине машины представляют собой, по меньшей мере, три сферических шарнира и соединительное звено, причем в приводе вращения рабочего органа крупногабаритной машины, содержащем рабочий орган, привод его вращения, включающий силовой агрегат в виде двигателя и выходное звено, выполненное с возможностью соединения с рабочим органом машины, и элементы крепления корпуса силового агрегата к станине машины, согласно изобретению элементы крепления корпуса силового агрегата к станине машины представляют собой, по меньшей мере, три сферических шарнира и соединительное звено, причем один из сферических шарниров установлен между корпусом силового агрегата и станиной машины через маятниковый рычаг, установленный на дополнительном цилиндрическом шарнире, а два других размещены между корпусом силового агрегата и станиной машины с взаимодействием друг с другом через соединительное звено.
В обоих вариантах двигатель может быть снабжен редуктором.
По сравнению с известными предлагаемое техническое решение имеет более простую конструкцию, так как может быть выполнено с применением стандартных и выпускаемых промышленностью в массовом порядке сферических шарниров. Предлагаемый привод имеет более широкие возможности компенсации неточностей взаимного расположения опор рабочего органа машины.
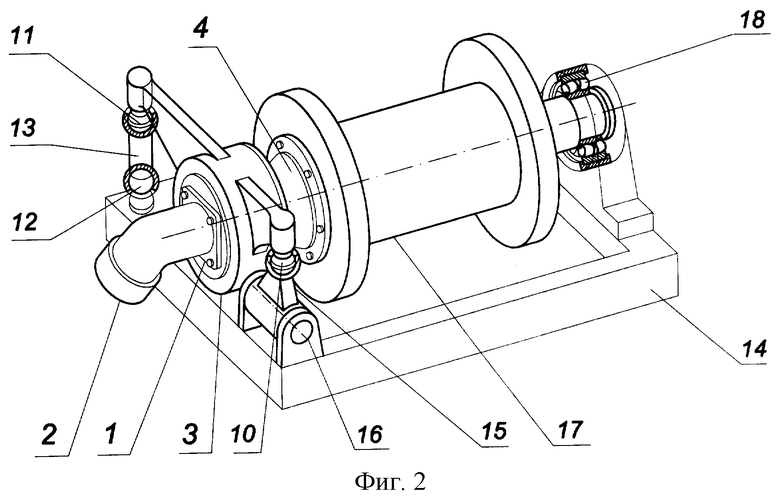
На фиг.1 схематично представлен привод вращения, в данном случае - привод рабочей емкости бетоносмесителя, выполненный согласно первому варианту.
На фиг.2 показано возможное конструктивное решение привода канатного барабана лебедки согласно второму варианту.
Силовой агрегат 1 крупногабаритной машины выполнен в виде двигателя 2 и редуктора, имеющего корпус 3 и выходное звено 4, которое жестко соединено, в первом варианте (фиг.1), с рабочей емкостью бетоносмесителя 5. Рабочая емкость 5 с одной своей стороны через бандаж 7 и опорные катки 8 опирается на станину 9. Опорой другой стороны рабочей емкости 5 служит корпус редуктора 3. Элементы крепления корпуса 3 редуктора к станине 9 представляют собой три сферических шарнира 10, 11, 12 и соединительное звено 13. Шарнир 10 установлен непосредственно между корпусом 3 редуктора и станиной 9. Шарниры 11 и 12 также установлены между этими элементами, но посредством соединительного звена 13.
Во втором варианте (фиг.2) привод содержит идентичные с первым элементы 1-4 и 10-13. Отличие состоит в том, что один из сферических шарниров, а именно шарнир 10, установлен между корпусом 3 редуктора и станиной 14 посредством маятникового рычага 15, соединенного со станиной 14 цилиндрическим шарниром 16. Здесь выходное звено редуктора 4 жестко связано с рабочим органом машины в виде канатного барабана 17, который с одной стороны опирается на корпус редуктора 3, а с другой на роликовый сферический подшипник 18, установленный на станине 14.
В первом варианте (фиг.1) показанное исполнение устройства соединения корпуса редуктора 3 со станиной 9 в сочетании с опорой другой стороны рабочей емкости 5 в виде бандажа 7 и опорных катков 8 обеспечивает полную самоустанавливаемость рабочей емкости 5 в любом положении при ее вращении, которое она получает от силового агрегата 1 - от двигателя 2, через редуктор 3 и его выходное звено 4. При этом неизбежные неточности взаимного расположения всех элементов машины компенсируются подвижностями в трех сферических шарнирах 10, 11 и 12, а также на контактах бандажа 7 с опорными катками 8. При работе привода эта компенсация проявляется в некотором покачивании корпуса редуктора 3, которое тем более выражено, чем большие отклонения от номинального положения элементов допущены на реальной машине. Эти отклонения могут быть существенно большими, чем для известных технических решений, так как сферические шарниры, устанавливаемые по предлагаемым схемам, способны компенсировать отклонения, измеряемые десятками миллиметров, что заведомо превышает экономически целесообразную точность изготовления вращающихся рабочих органов самых крупногабаритных машин.
Во втором варианте (фиг.2) выполнение установки сферического шарнира 10 между корпусом 3 редуктора и станиной 14 посредством маятникового рычага 15, соединенного со станиной 14 цилиндрическим шарниром 16, обусловлено конструкцией второй опоры канатного барабана 17 в виде сферического подшипника 18, которая наиболее оптимальна для данного случая и которая дает канатному барабану 17 свободу поворота вокруг трех осей, но блокирует его линейные перемещения по этим трем осям. Для обеспечения полной самоустанавливаемости канатного барабана при его вращении, которое он получает от силового агрегата 1, необходима подвижность корпуса редуктора 3 относительно станины 14, которая и обеспечивается описанной установкой сферического шарнира 10.
Представленные схемы возможных конструктивных исполнений привода условны и составлены по соображениям наибольшей иллюстративности. В реальных машинах размеры сферических шарниров и элементов их крепления к корпусу редуктора по отношению к размерам этого корпуса могут быть существенно меньшими. Силовой агрегат может не иметь силовой трансмиссии в виде редуктора или иного механизма, а состоять из одного двигателя любого типа, вал которого является выходным звеном агрегата. Сферические шарниры могут иметь иное конструктивное исполнение, например в виде двух колец со сферическими контактными поверхностями контакта (стандартные изделия массового производства) с другими деталями, обеспечивающими их соединения со станиной машины, с корпусом силового агрегата и соединительным звеном.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2554839C2 |
| КАРЕТКА ДЛЯ РЕЛЬСОВЫХ НАПРАВЛЯЮЩИХ КАЧЕНИЯ | 2011 |
|
RU2564908C2 |
| СИСТЕМА СОЕДИНЕНИЯ ДЕТАЛЕЙ МАШИН ИЛИ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2013 |
|
RU2605901C2 |
| Устройство для подачи заготовок в рабочую зону обрабатывающей машины | 1989 |
|
SU1754291A1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| АГРЕГАТ С КАНАТНОЙ ТЯГОЙ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1993 |
|
RU2090990C1 |
| Устройство для снятия фрикционных накладок с колодок колесного тормоза | 1988 |
|
SU1581552A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
| ГОРНОЛЫЖНЫЙ БУГЕЛЬНЫЙ ПОДЪЕМНИК | 1999 |
|
RU2173645C2 |
| МАШИНА ДЛЯ ВОЗВЕДЕНИЯ ОПОР | 1993 |
|
RU2028407C1 |
Изобретение относится к области машиностроения и может быть использовано в машинах, имеющих тяжелые рабочие органы, например в лебедках с канатными барабанами или в смесителях с тяжелой вращающейся емкостью. Крупногабаритная машина содержит рабочий орган, привод его вращения, включающий силовой агрегат в виде двигателя, и выходное звено, выполненное с возможностью соединения с рабочим органом машины, и элементы крепления корпуса силового агрегата к станине машины. Элементы крепления корпуса силового агрегата к станине машины представляют собой, по меньшей мере, три сферических шарнира и соединительное звено. Один из сферических шарниров выполнен с возможностью установки непосредственно между корпусом силового агрегата и станиной машины или посредством маятникового рычага и цилиндрического шарнира, а два других размещены между корпусом силового агрегата и станиной машины с взаимодействием друг с другом через соединительное звено. Силовой агрегат может быть выполнен в виде двигателя с редуктором. Технический результат - повышение функциональной возможности привода при сохранении простоты конструкции. 2 н. и 1 з.п. ф-лы, 2 ил.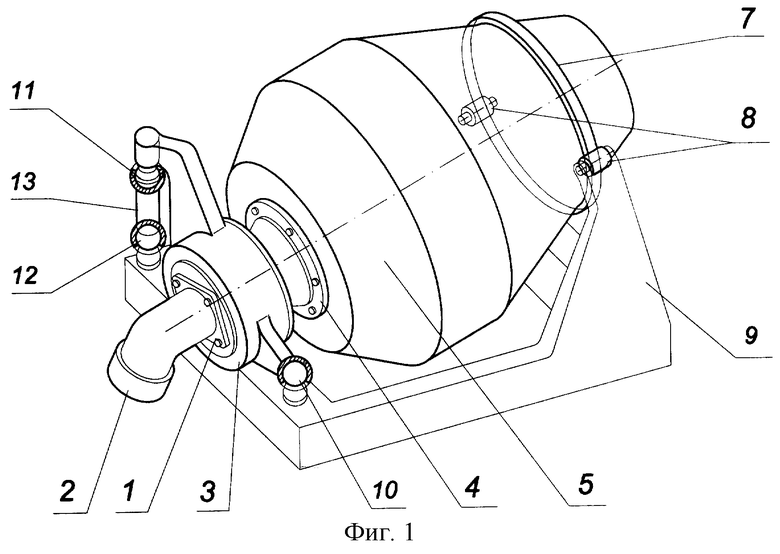
| JP 4111731 А, 13.04.1992 | |||
| JP 59185231 А, 20.10.1984 | |||
| DE 19711039 С1, 28.05.1998 | |||
| Литейная машина для полученияРАСТВОРиМыХ МОдЕлЕй | 1979 |
|
SU822972A1 |

