Изобретение относится к рельсовым направляющим качения, в частности к модулям линейного перемещения с каретками с телами качения, циркулирующими частично без нагрузки, и может использоваться в станочном оборудовании, робототехнических комплексах и ином оборудовании, содержащем узлы линейного перемещения.
Известны модули линейного перемещения, содержащие ползун, жестко соединенный с каретками, установленными на рельсовых направляющих качения (Лурье A.M. Рельсовые направляющие качения. „Сервотехника" ЗАО. 2006 г.). Их недостатком является жесткое соединение ползуна с каретками, что делает такие модули статически неопределимыми. Задача изобретения состоит в обеспечении статической определимости (самоустанавливаемости) модуля и решается тем, что в различных вариантах ползун модуля соединен с установленными на рельсовых направляющих качения каретками посредством различных шарниров и промежуточных звеньев.
По сравнению с известными, предлагаемое техническое решение обеспечивает самоустанавливаемость ползуна модуля на рельсовых направляющих и за счет этого исключение избыточных нагрузок, вызываемых отклонениями от точности изготовления и монтажа составных элементов модуля.
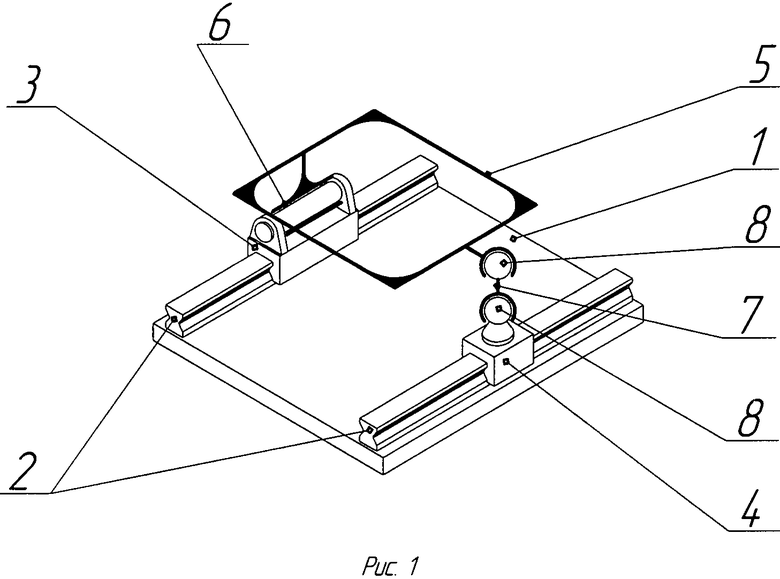
На рисунке 1 представлена структурная схема модуля линейного перемещения, соответствующая п.1 формулы изобретения, - варианту модуля с двумя каретками и по меньшей мере одной рельсовой направляющей.
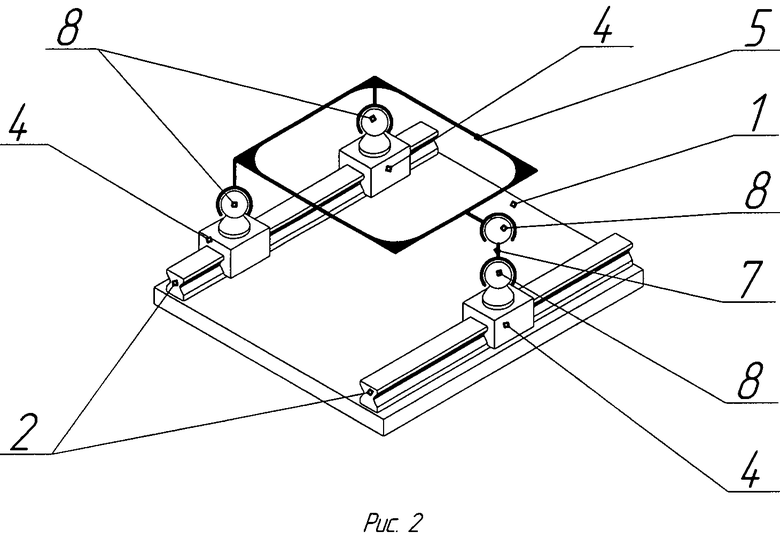
На рисунке 2 представлена структурная схема модуля линейного перемещения, соответствующая п.2 формулы изобретения, - варианту модуля с тремя каретками и по меньшей мере двумя рельсовыми направляющими качения.
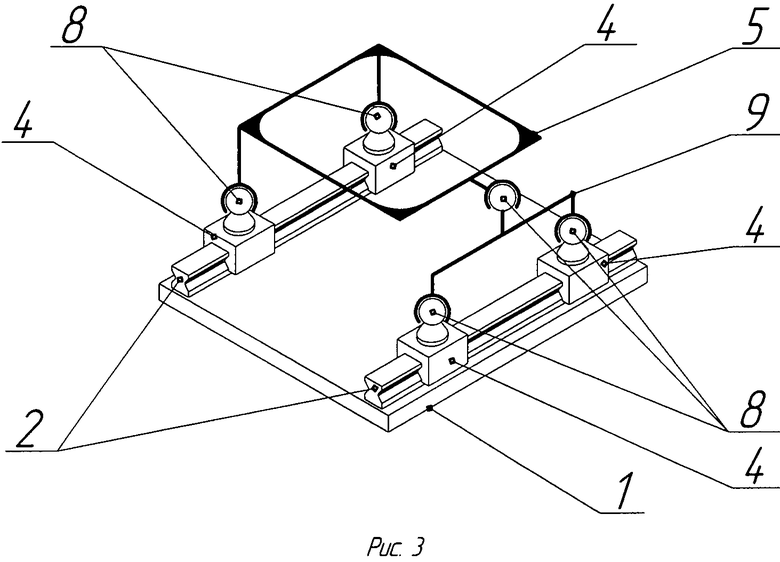
На рисунке 3 представлена структурная схема модуля линейного перемещения, соответствующая п.3 формулы изобретения, - варианту модуля с четырьмя каретками.
Модуль содержит стойку 1, на которой в различных вариантах жестко закреплены от одной до трех рельсовых направляющих качения 2. На рельсовых направляющих качения 2 установлены каретки 3 и 4. В корпусах этих кареток установлены не показанные на схемах тела качения, посредством которых каретки 3 и 4 взаимодействуют с рельсовыми направляющими качения 2. Модуль также содержит ползун 5, который в различных вариантах соединен с корпусами кареток 3 и 4 посредством цилиндрического шарнира 6, промежуточного звена 7, сферических шарниров 8 и промежуточного звена 9.
В варианте с двумя каретками (рис.1) ползун 5 посредством цилиндрического шарнира 6 соединен с корпусом каретки 3 и посредством промежуточного звена 7 и двух сферических шарниров 8 соединен с кареткой 4. Один из этих двух сферических шарниров 8 установлен между промежуточным звеном 7 и ползуном 5, а второй - между промежуточным звеном 7 и корпусом каретки 4. В схеме, показанной на рис.1, имеются две рельсовые направляющие 2, на одной из которых установлена каретка 3, а на другой - каретка 4. В этом варианте модуля возможна схема, в которой каретки 3 и 4 установлены на одной рельсовой направляющей 2. При этом должна быть изменена ориентация цилиндрического шарнира 6, что не меняет сути изобретения.
В варианте с тремя каретками (рис.2) ползун 5 посредством сферических шарниров 8 соединен с корпусами двух кареток 4, установленных на одной из рельсовых направляющих 2, а с корпусом третьей каретки 4, установленной на второй рельсовой направляющей 2, ползун 5 соединен посредством промежуточного звена 7 и двух сферических шарниров 8. Один из этих двух сферических шарниров 8 установлен между промежуточным звеном 7 и ползуном 5, а второй - между промежуточным звеном 7 и корпусом третьей каретки 4.
В этом варианте модуля возможна схема, в которой имеются три рельсовые направляющие 2, на каждой из которых установлено по одной каретке 4.
В варианте с четырьмя каретками (рис.3) ползун 5 посредством сферических шарниров 8 соединен с корпусами двух кареток 4, установленных на одной из двух рельсовых направляющих 2, а с корпусами третьей и четвертой кареток 4, установленных на второй рельсовой направляющей 2, ползун 5 соединен посредством промежуточного звена 9 и трех сферических шарниров 8. Один из этих трех сферических шарниров 8 установлен между промежуточным звеном 9 и ползуном 5, второй - между промежуточным звеном 9 и корпусом третьей каретки 4, а третий - между промежуточным звеном 9 и корпусом четвертой каретки 4.
При работе модуля, выполненного по всем трем вариантам, благодаря соединению его ползуна 5 с различными каретками (3 и 4) посредством различных шарниров (6 и 8) и промежуточных звеньев (7 и 9), обеспечивается полная самоустанавливаемость ползуна 5 относительно рельсовых направляющих 2 и стойки 1, что, в свою очередь, исключает появление избыточных нагрузок и деформаций, связанных с неточностями изготовления, сборки и монтажа компонентов модуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАРЕТКА ДЛЯ РЕЛЬСОВЫХ НАПРАВЛЯЮЩИХ КАЧЕНИЯ | 2011 |
|
RU2564908C2 |
| КРУПНОГАБАРИТНАЯ МАШИНА (ВАРИАНТЫ) | 2004 |
|
RU2265152C1 |
| Самоустанавливающийся мостовой кран | 2016 |
|
RU2621211C1 |
| СИСТЕМА СОЕДИНЕНИЯ ДЕТАЛЕЙ МАШИН ИЛИ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2013 |
|
RU2605901C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| Распорная плита щековой дробилки | 1980 |
|
SU967554A1 |
| МОДУЛЬ ПОВОРОТНО-РАЗДВИЖНОЙ ДВЕРИ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2640160C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТРОЙСТВО РАЗВЕРТЫВАНИЯ-СКЛАДЫВАНИЯ АНТЕННЫ | 1996 |
|
RU2093932C1 |
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
Модуль линейного перемещения содержит стойку (1), две рельсовые направляющие (2), четыре каретки (3), ползун (4). Соединения ползуна (4) с двумя каретками выполнены в виде сферического шарнира (5), установленного между ползуном и корпусом каждой из этих двух кареток, а соединение ползуна с третьей и четвертой каретками выполнено в виде промежуточного звена (6) и трех сферических шарниров, один из которых установлен между промежуточным звеном и корпусом третьей каретки, второй сферический шарнир установлен между промежуточным звеном и корпусом четвертой каретки, а третий сферический шарнир установлен между промежуточным звеном и ползуном. Обеспечивается полная самоустанавливаемость модуля за счет исключения появления избыточных нагрузок и деформаций, связанных с неточностями изготовления, сборки и монтажа компонентов модуля. 1 ил.
Модуль линейного перемещения, содержащий стойку, две жестко закрепленные на стойке рельсовые направляющие, четыре каретки с установленными в их корпусах телами качения, посредством которых каждая из кареток соединена с рельсовой направляющей, и соединенный с каретками ползун, отличающийся тем, что соединения ползуна с двумя каретками выполнены в виде сферического шарнира, установленного между ползуном и корпусом каждой из этих двух кареток, а соединение ползуна с третьей и четвертой каретками выполнено в виде промежуточного звена и трех сферических шарниров, один из которых установлен между промежуточным звеном и корпусом третьей каретки, второй сферический шарнир установлен между промежуточным звеном и корпусом четвертой каретки, а третий сферический шарнир установлен между промежуточным звеном и ползуном.

