Изобретение относится к машиностроению и может быть использовано для подачи листовых заготовок большого размера в рабочую зону обрабатывающей машины, например штамповочного пресса.
Известен промышленный робот к штамповочному прессу, содержащий колонну, смонтированную на основании с возможностью перемещения в вертикальном направлении, руку, закрепленную на колонне, штангу со охватом, установленную в руке с возможностью перемещения в горизонтальном направлении, механизмы вертикального и горизонтальноготор 1йещен ия, содержащие системы зубчатых передач и рычажных механизмов, обеспечивающие возможность движения руки с остановками в двух крайних положениях.
Недостатками данного робота являются сложность конструкций механизмов вертикального и горизонтального перемещений и ограничение технологических возможностей при работе с крупногабаритными заготовками.
Наиболее близким по технической сущности к предлагаемому является манипулях|
2
ГО
ю
тор, содержащий основание, руку из шар- нирно связанных между собой стержней, собранных в призму с изменяемыми между смежными стержнями углами, в вершинах которых установлены сферические шарниры, а также приводы стержней с кривошипами, связанными посредством трехстепенных универсальных шарниров с соответствующими стержнями руки.
Недостатками этого манипулятора являются ограниченный объем рабочего пространства и отсутствие возможности произведения манипуляций с листовыми заготовками большого размера.
Цель изобретения - расширение функциональных возможностей за счет увеличения хода захватных органов и обеспечения захвата и перемещения крупногабаритных листовых заготовок.
Поставленная цель достигается тем, что устройство для подачи заготовок в рабочую зону машины, содержащее манипуляцион- ный орган в виде шарнирной призмы с подвижным и неподвижным основаниями, связанными между собой посредством шар- нирно закрепленных стержней, плеча с захватными органами, кинематически связанного с подвижным основанием призмы с приводным механизмом перемещения захватных органов, снабжено дополнительным манипуляционным органом, установленным симметрично относительно продольной оси обрабатывающего оборудования, а механизмы перемещения захватных органов кинематически связаны между собой посредством соединительных валов с коническими шестернями и имеют единый привод, а механизм перемещения захватных органов выполнен в виде упругого элемента, установленного на подвижном основании призмы, свободный конец которого сопряжен с звеном плоского параллелограмма, и ограничительного упора, смонтированного на подвижном основании с возможностью взаимодействия со звеном шарнирного параллелограмма в одном из крайних его положений.
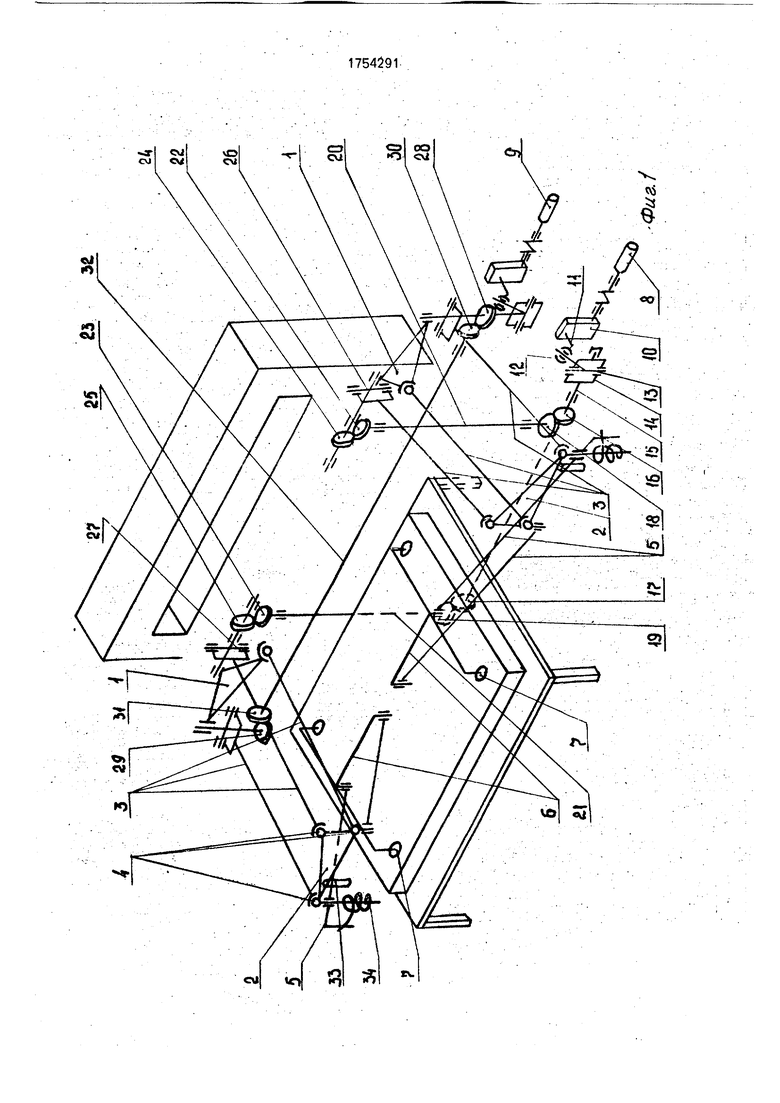
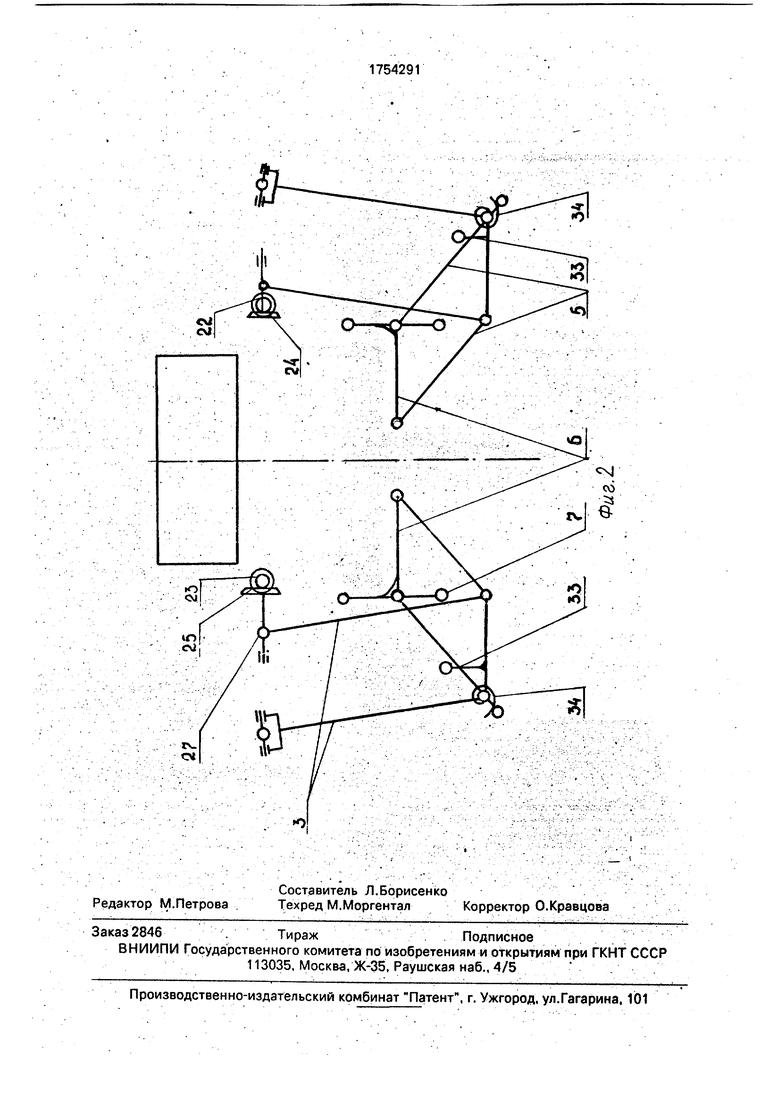
На фиг. 1 представлена схема предлагаемого устройства, аксонометрическое изображение; на фиг. 2 - то же, вид сверху.
Устройство включает два одинаковых манипуляционных органа, симметрично установленных относительно оси обрабатывающей машины. Каждый из манипуляционных органов содержит неподвижное основание 1 и подвижное основание 2, связанные между собой тремя стержнями 3 равной длины, снабженными на концах шаровыми шарнирами 4. К подвижному основанию 2 шарнирно прикреплены стержни 5, шарнирно соединенные по концам звеном 6. Размеры звеньев 6, стержней 5 и расстояния по осям шарниров на подвижном основании 2 подобраны так, что
указанные звенья образуют плоский шарнирный параллелограмм. На выходном звене 6 установлен блок захватных органов в виде вакуумных присосок 7. Двигатель 8 обеспечивает вертикальное движение ма0 нипуляционного органа, двигатель 9 - горизонтальное. Привод вертикального движения включает червячный редуктор 10, выходной вал которого снабжен кривошипом 11 Последний соединен сферическим
5 шарниром 12 с крестовиной 13 универсального шарнира 14. Объединение указанных звеньев образует крестовинную муфту. Аналогичным образом устроен привод горизонтального движения. Универсальный шарнир
0 14 установлен на горизонтальном соединительном валу 15, снабженном коническими шестернями 16 и 17, которые взаимодействуют с коническими шестернями 18 и 19, закрепленными на концах соединительных
5 валов 20 и 21. На других концах этих валов установлены конические шестерни 22 и 23, взаимодействующие с коническими шестернями 24 и 25, закрепленными на крестовинах универсальных шарниров 26 и 27,
0 связанными со стержнями 3. Горизонтальное движение сообщается от привода посредством конических шестерен 28-31 и горизонтального соединительного вала 32. На подвижных основаниях 2 установлены
5 регулируемые односторонние ограничительные упоры 33 и пружины 34, воздействующие на стержни 5 и прижимающие их к упорам 33.
Устройство работает следующим обра0 зом.
При включении электродвигателя 8 получает вращение выходной вал червячного редуктора 10 с кривошипом 11, которое затем через универсальный шарнир 14 преоб5 разуется в поворот на конечный угол соединительного вала 15. От горизонтального соединительного вала 15 движение передается посредством конических шестерен 16-19 вертикальных соединитель0 ных валов 20 и 21, конических шестерен 22-25 крестовинам универсальных шарниров 26 и 27 и далее кинематически связанным с ними стержням 3, обеспечивающим вертикальное перемещение манипуляцион5 ных органов. Последние синхронно опускаются до соприкосновения захватных органов 7 с заготовкой. Далее следует мгновенная остановка, а затем подъем в исходное положение, и Цикл вертикального движения заканчивается. После этого включается электродвигатель 9 горизонтального движения, обеспечивающий через конические шестерни 28-31 и горизонтальный соединительный вал 32 синхронный поворот обоих манипуляционныхорганов в горизон- тальной плоскости. При этом движении оба манипуляционных органа посредством захватных органов 7 и заготовки связаны в общую кинематическую цепь, а заготовка играет роль дополнительно введенного свя- зующего звена. Благодаря симметричности и равенству размеров звеньев манипуляционных органов заготовка получает прямолинейное поступательное движение вдоль оси пресса, как бы выдавливаясь манипуляци- онными органами вперед. При этом преодолевается сила упругости пружины 34 и плоские шарнирные параллелограммы отходят от у гторо в 33. После подачи заготовки в рабочую зону пресса выключается привод горизонтального движения, захвйтные органы отделяются от заготовок. Затем включается привод горизонтального движения и манипуляционные органы возвращаются в исходное положение, а шарниряые парал- лелограммы под действием пружины 34 поворачиваются до прижатия к упорам 33.
Применение предлагаемого устройства позволяет повысить производительность труда при обработке крупногабаритных за- готовок, уменьшить число обслуживающих рабочих, улучшить условия труда и повысить безопасность труда.
Формула изобретения - 1. Устройство для подачи заготЪвок в рабочую зону обрабатывающей машины, содержащее манипуляционный орган в виде шарнирной призмы с подвижным и неподвижным основаниями, связанными
между собой посредством шарнирно закрепленных стержней, плеча с захватным органом, кинематически связанного с подвижным основанием призмы с приводным механизмом перемещения захватных органов, отличающееся тем, что, с целью расширения функциональных возможностей за счет увеличения хода захватных ор- ганов и обеспечения захвата и перемещения крупногабаритных листовых заготовок, оно снабжено дополнительным мзнипуляционным органом, установленным симметрично относительно продольной оси обрабатывающего оборудования, а механизмы перемещения захватных органов кинематически связаны между собой посредством соединйТёлбныхЪало в с коническими шестернями и имеют единый привод, а механизм перемещения захватных органов выполнен в виде упругого элемента, установленного на подвижном основании призмы, свободный конец которого сопряжен с звеном Плоского параллелограмма, и ограничительного упора, смонтированного на подвижном основании с возможностью взаимодействия со звеном шарнирного параллелограмма в одном из крайних его положений.
2. Устройство по п.1, отличающее- с я тем, что привод механизма перемещения захватных органов выполнен в виде по- следовательно установленных и кинематически связанных между собой электродвигателя, червячного редуктора, крестовин ной муфты и дополнительной конической шестерни, которая связана посредством зубчатого зацепления с конической шестерней соединительного вала механизма перемещения захватных органов.
4
25
2з за
Фиг./
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| Манипулятор | 1976 |
|
SU653103A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
Использование: для подачи листовых заготовок большого размера в рабочую зону обрабатывающей машины. Сущность изобретения: устройство содержит манипуля- ционный орган в виде шарнирной призмы с подвижным и неподвижным основаниями, связанными между собой посредством шар- нирно закрепленных стержней, плечо с захватными органами, кинематически связанные с подвижным основанием призмы, приводной механизм перемещения захватных органов, дополнительный манипуляционный орган, установленный симметрично относительно Продольной оси обрабатывающего оборудования, а механизмы перемещения захватных органов кинематически связаны между собой посредством соединительных валов с коническими шестернями и имеют единый привод, а механизм перемещения захватных органов выполнен в виде упругого элемента, установленного не гТод§ижном основании призмы, свободный конец которого сопряжен с звеном плоского параллелограмма и ограничительногб пфра, смбнтРГро- ванного на подвижном основании с возможностью взаимодействия со звеном шарнирного параллелограмма в одном из крайних его положений. 1 з.п. ф-лы, 2 ил. со с
| Манипулятор | 1987 |
|
SU1505775A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
