Способ диагностики рельсового пути относится к способам и средствам неразрушающего контроля материалов и может быть использован для диагностики рельсов и других протяженных объектов. Заявляемый способ диагностики рельсового пути в части привязки координат диагностических и дефектоскопических средств к конструктивным элементам рельсового пути может быть применен для определения точных координат, любых проблемных участков железнодорожной инфраструктуры, обнаруженных соответствующими средствами диагностики.
Контроль состояния объектов железнодорожной инфраструктуры заключается в обнаружении отклонений от нормативного состояния соответствующих подсистем, а также в определении координат аномальных объектов. Первая задача решается путем создания соответствующих измерительных устройств, а вторая - решением навигационной задачи, т.е. привязкой обнаруженных аномальных объектов к координатам рельсового пути.
Основными способами контроля состояния рельсового пути являются магнитодинамические (МД) и ультразвуковые (УЗ), каждому из которых присущи соответствующие достоинства и недостатки.
Магнитодинамический способ дефектоскопии заключается в возбуждении магнитного поля в рельсе системой намагничивания и приеме сигналов от аномалий в рельсах датчиками магнитного поля. Магнитодинамический дефектоскоп (МДД) устанавливается на транспортном средстве, перемещающемся при измерениях вдоль рельсового пути.
К достоинствам магнитодинамических методов следует отнести следующие.
1. Возможность работы во всех климатических зонах при любых погодных условиях.
2. Высокая достоверность измерений, обеспечивающая хорошую повторяемость результатов и возможность мониторинга развития отдельных дефектов рельсов.
3. Возможность обнаружения конструктивных элементов рельсового пути, в том числе болтовых и сварных стыков рельсов, стрелочных переводов, стыковых накладок, рельсовых подкладок и т.п.
4. Возможность работы на значительных (до 80 км/ч) скоростях движения транспортного средства.
К недостаткам магнитодинамических методов относятся следующие.
1. Ограниченные возможности по обнаружению дефектов на глубине более 6-8 мм от поверхности катания рельса - в основном развитые поперечные трещины внутри головки рельса, подповерхностные дефекты и изломы рельсов.
2. Значительные массогабаритные характеристики и высокое энергопотребление.
Таким образом, магнитодинамические способы целесообразно применять в скоростных вагонах-дефектоскопах и дефектоскопных автомотрисах. Способность обнаружения конструктивных элементов можно использовать для относительной навигации, т.е. для привязки обнаруженных дефектов к рельсовому пути.
Ультразвуковая дефектоскопия заключается в излучении УЗ колебаний внутрь рельса и приеме ответных эхо-сигналов электроакустическими преобразователями (ЭАП) по различным схемам прозвучивания и способам выявления дефектов.
Достоинства УЗ способов заключаются в возможности обнаружения любых дефектов в любых частях рельса, оценки их условных размеров, ориентации и т.п., ограниченные лишь доступностью поверхностей рельса для ввода УЗ колебаний в действующем рельсовом пути.
Недостатки УЗ способов связаны со сложностью обеспечения стабильного и надежного акустического контакта ЭАП с поверхностью рельса, особенно на высоких скоростях перемещения средства дефектоскопии, что приводит к
1) зависимости результатов измерений от погодных условий,
2) низкой повторяемости результатов измерений,
3) невысокой обнаруживающей способности фиксации конструктивных элементов рельсового пути: болтовых и сварных стыков рельсов.
Таким образом, наиболее предпочтительным является использование УЗ способов в составе ручных дефектоскопических тележек, где низкая скорость перемещения и участие оператора позволяют провести подробное исследование подозрительных участков рельсов и принять обоснованное решение о дальнейших действиях по обеспечению безопасности движения поездов на железной дороге.
При диагностике рельсового пути возникает необходимость координатной привязки результатов измерений. Такая привязка может осуществляться с использованием
1) систем глобальной навигации GPS, ГЛОНАСС и т.п., которые дают хорошую, но грубую (точность несколько метров при разумных затратах) точность позиционирования дефектоскопического средства,
2) датчика скорости и одометра в дефектоскопическом средстве, погрешность которых из-за пробуксовок колес, их износа и т.п. может составлять до 10-20%,
3) километровых и пикетных столбов, осуществляемая, как правило, операторами вручную и дающая погрешность от 0,5 до 3,0 м,
4) специальных меток, например магнитных, нанесенных на рельсовый путь и автоматически считываемых дефектоскопическим средством.
Эти способы отличает высокая точность определения положения, но только в окрестности меток, а также высокая стоимость подготовительных работ.
По мнению авторов данного изобретения, наиболее удобный способ привязки железнодорожных объектов к рельсовому пути заключается в использовании конструктивных элементов рельсового пути: болтовых и сварных стыков рельсов, стрелочных переводов, рельсовых подкладок и проч. Такие элементы хорошо обнаруживаются МД методом в автоматическом режиме и оператором визуально. Точность позиционирования составляет от единиц до десятков сантиметров.
Полноценную и достоверную диагностику состояния рельсового пути не удается провести с использованием какого-либо одного дефектоскопа. Скоростные вагоны-дефектоскопы обладают широкими диагностическими возможностями, не требуют занятия рельсового пути на большие временные интервалы, но высокая скорость и нестабильность акустического контакта УЗ дефектоскопа в процессе движения не позволяют провести диагностику с высоким качеством.
Окончательный анализ результатов измерений в стационарных условиях сопряжен с существенными трудозатратами, а координаты выявленных дефектов выдаются с погрешностью, определяемой погрешностью средств измерений скоростного вагона-дефектоскопа.
Качество измерений и диагностики УЗ дефектоскопными тележками оказывается более высоким по сравнению со скоростными средствами контроля, однако их не удается снабдить широким спектром диагностической аппаратуры, например МДД из-за его большого веса и энергопотребления.
Обработку результатов измерений также не удается решить какой-либо однократной процедурой. Оперативное распознавание обнаруженных проблем рельсов в вагоне-дефектоскопе не удается проводить в полном объеме на высоких скоростях, так что на долю оперативных методов отводится лишь обнаружение критических дефектов.
Таким образом, надежного результата диагностики рельсового пути удается добиться путем разумного сочетания мобильных (скоростных) и съемных дефектоскопических средств, различных средств диагностики, оперативного и лабораторного анализа.
Известен способ диагностики рельсового пути [1], заключающийся в установке на транспортное средство МД и УЗ дефектоскопов и зондировании ими рельсового пути. Указанные средства используются независимо. Причем МД способ используется для дефектоскопии головки рельсов, а УЗ - для контроля других элементов рельса. Скорость перемещения такого средства предполагается от 5 до 40 км в час.
Недостатком данного способа являет низкое качество дефектоскопии, связанное с неполным использованием доступной информации.
Известен способ диагностики рельсового пути [2], предполагающий использование УЗ и (или) МД дефектоскопии и различных вариантов привязки результатов измерений к железнодорожному пути: по изображениям окружающих железнодорожный путь объектов, по специальным радио-, магнитным и кодированным меткам, километровым и пикетным столбам, GPS и другими способами.
Первым недостатком данного способа является низкая информативность дефектоскопии, поскольку возможности МД и УЗ дефектоскопии используются не в полной мере и раздельно. Второй недостаток обусловлен сложностью и неточностью привязки измерений к рельсовому пути, поскольку большинство предложенных вариантов предполагает создание достаточно сложных и дорогих систем.
Известен способ диагностики рельсового пути [3], согласно которому МД дефектоскоп используется помимо основного назначения и для решения задачи относительной навигации - измерения скорости перемещения транспортного средства.
Недостатком данного способа являются низкие дефектоскопические возможности, связанные с ограниченностью МД методов диагностики рельсов.
Известен способ магнитно-ультразвуковой диагностики рельсового пути [4], который предполагает привязку данных МД и многоканального УЗ дефектоскопов сериям нумерованных синхронизирующих импульсов, формируемых «от колеса». Полученные данные сохраняются и обрабатываются.
Недостаток данного способа связан с неточностью привязки измерений к рельсовому пути.
Известен способ диагностики рельсового пути [5], заключающийся в использовании УЗ дефектоскопов, установленных на двух транспортных средствах, снабженных системой связи. Первое транспортное средство двигается постоянно вдоль рельсового пути, обнаруживая подозрительные участки и фиксируя их положение на рельсовом пути «от колеса». Результаты измерений сохраняются в виде аналоговых сигналов, обработанных цифровых сигналов обнаружения и в виде таблиц. Обработка полученной информации производится оперативно и в лаборатории. Второе транспортное средство при оперативном обнаружении дефектов останавливается для оценки подозрительного участка.
Наиболее близким к заявляемому является способ диагностики рельсового пути [6], предполагающий наличие в вагоне-дефектоскопе разнообразных средств контроля и диагностики железнодорожного пути, в том числе средств дефектоскопии рельсов. Абсолютные координаты вагона определяются с использованием аппаратуры глобальной навигации GPS и т.п. Относительные координаты определяются с использованием датчиков пути и скорости, а на участках пути, оборудованных системой бесконтактной привязки, например по радиометкам, дополнительно корректируются с помощью этих меток. Информация, полученная от средств дефектоскопии рельсов, привязывается к координатам рельсового пути, сохраняется и анализируется автоматически и с использованием оператора оперативно и в лабораторных условиях. Скорость перемещения такого диагностического комплекса может составлять до 140 км/ч и выше. Основная идея данного способа состоит в синхронизации измерений всеми средствами диагностики по единой координате пути с шагом от 1 до 100 мм.
Недостатком такого способа является низкое качество диагностики рельсового пути, связанное со следующими обстоятельствами. В [6] не рассматривается конкретный вариант средств дефектоскопии рельсов, однако, исходя из предполагаемой скорости перемещения, пригодным оказывается лишь МД способ, который, как показано выше, не позволяет обнаруживать многие дефекты рельса. Координатная привязка измерений с использованием выбранных средств глобальной и относительной навигации не обеспечивает требуемую точность позиционирования.
Задачей, решаемой заявляемым способом диагностики рельсового пути, является обеспечение высокого качества и скорости обнаружения дефектов рельсов благодаря сочетанию МД и УЗ методов диагностики с точной привязкой результатов к рельсовому пути.
Для решения этой задачи в способе диагностики рельсового пути по п.1 формулы изобретения, заключающемся в том, что на рельсовое транспортное средство устанавливают средства дефектоскопии рельсов, а также системы глобальной спутниковой навигации и относительной навигации с использованием колеса рельсового транспортного средства, перемещают рельсовое транспортное средство по участку рельсового пути, постоянно зондируют рельсы средствами дефектоскопии, принимают от них ответные сигналы, которые сохраняют совместно с данными систем глобальной и относительной навигации в виде диагностической карты участка рельсового пути, оперативно и в лабораторных условиях анализируют сигналы средств дефектоскопии, принимают решение степени опасности обнаруженных дефектов, определяют по диагностической карте их координаты и выбирают соответствующие действия, в качестве средства дефектоскопии рельсового транспортного средства используют магнитный дефектоскоп, при анализе принятых сигналов распознают и отмечают сигналы от дефектов и конструктивных элементов рельсового пути, координаты последних сохраняют в диагностической карте пути в качестве дополнительных относительных координат рельсового пути, устанавливают на рельсовое транспортное средство ультразвуковой дефектоскоп, перемещают и постоянно синхронизируют положение ультразвукового дефектоскопа с диагностической картой участка рельсового пути, используя системы глобальной и относительной навигации, а также визуальное наблюдение рельсового пути оператором, повышают степень детализации измерений ультразвуковым дефектоскопом в окрестностях дефектов и конструктивных элементов рельсового пути, хранящихся в диагностической карте рельсового пути, анализ сигналов магнитного и ультразвукового дефектоскопов проводят совместно.
По п.2 формулы изобретения в способе диагностики рельсового пути по п.1 корректируют диагностическую карту по результатам каждого прохода участка рельсового пути средствами дефектоскопии.
Существенными отличиями заявляемого способа диагностики рельсового пути по сравнению с прототипом являются следующие.
В качестве средства дефектоскопии рельсового транспортного средства на первом этапе используют магнитный дефектоскоп, который позволяет обнаружить аномалии магнитного поля, которые обусловлены конструктивными элементами рельсового пути, дефектами в головке рельсов и изломами. Ряд конструктивных элементов рельсов - болтовые и сварные стыки рельсов, стрелочные переводы зачастую оказываются местами сосредоточения дефектов, так что эти элементы следует проверять с особенной тщательностью.
В прототипе не рассматриваются конкретные средства диагностики рельсового пути и способы их использования. При анализе сигналов принятых МДД распознают и отмечают сигналы от дефектов и конструктивных элементов рельсового пути, координаты последних сохраняют в диагностической карте пути в качестве дополнительных относительных координат рельсового пути. Таким образом, все результаты измерений оказываются привязанными к регулярной сетке меток сварных стыков рельсов (стандартная длина свариваемых рельсов на российских ж.д. составляет 12,5 и 25,0 м) и рельсовых подкладок (0,42-0,56 м).
В прототипе привязка результатов измерений производится «многодискретным синхронизатором по единым координате пути и географической координате», а в основе привязки лежат данные GPS и «датчика пути и скорости». Такой способ не обеспечивает требуемую точность привязки из-за неточности исходных данных. Предлагаемая в прототипе коррекция с помощью радиометок применима, но только там, где они есть, и не способна обеспечить объявленную точность до 1 мм.
Устанавливают на рельсовое транспортное средство ультразвуковой дефектоскоп. Заявляемый способ диагностики предполагает совместное использование МД и УЗ дефектоскопии как на одном, так и на разных транспортных средствах. Последний вариант является более предпочтительным, поскольку быстрое транспортное средство для МДД и более медленное для УЗ дефектоскопа позволяет в наилучшей степени использовать достоинства и скомпенсировать недостатки методов.
В прототипе все средства диагностики рельсов устанавливают на вагон-дефектоскоп, однако, при объявленных скоростях дефектоскопии (140 км/ч) возможности УЗ дефектоскопии сильно ограничены в силу отмеченных выше причин.
Перемещают и постоянно синхронизируют положение ультразвукового дефектоскопа с диагностической картой участка рельсового пути, используя системы глобальной и относительной навигации, а также визуальное наблюдение рельсового пути оператором. Такую синхронизацию удается выполнить достаточно точно, поскольку в диагностической карте имеются метки конструктивных элементов рельсов, в частности болтовых и сварных стыков рельсов и рельсовых подкладок (на каждой шпале), которые легко обнаруживаются визуально.
В прототипе по существу используется временная привязка измерений, которая не точна из-за неточности информации о текущем положении и переменной скорости перемещения транспортного средства.
Повышают степень детализации измерений ультразвуковым дефектоскопом в окрестностях дефектов и конструктивных элементов рельсового пути, хранящих в диагностической карте рельсового пути, что позволяет провести поиск дефектов в местах наиболее вероятного их возникновения. При этом производится повышение чувствительности отдельных каналов дефектоскопа, корректировка зоны временной селекции и т.п. В частности, при контроле зоны сварных стыков рельсов, из-за значительного ослабления УЗ колебаний в металле рельса в зоне термического влияния сварного шва, кратковременное увеличение чувствительности каналов дефектоскопа в момент прохождения сварного стыка повышает вероятность обнаружения в нем дефектов.
В прототипе проводится сплошной поиск дефектов, подробности которого не рассматриваются.
Корректировка диагностической карты по результатам каждого прохода участка рельсового пути средствами дефектоскопии, что позволяет постоянно актуализировать информацию о состоянии участка рельсового пути.
В прототипе говорится об анализе и даже прогнозировании развития дефектов, однако, конкретный способ решения этих задач не предлагается.
Заявляемый способ иллюстрируют следующие графические материалы.
Фиг.1 - вагон-дефектоскоп, где:
1 - Вагон-дефектоскоп.
2 - Датчик магнитного дефектоскопа.
3 - Датчик пути (от колеса).
4 - Аппаратура GPS.
5 - Блок обработки.
6 - Носитель диагностической карты.
7 - Рельс.
8 - Катушки намагничивания.
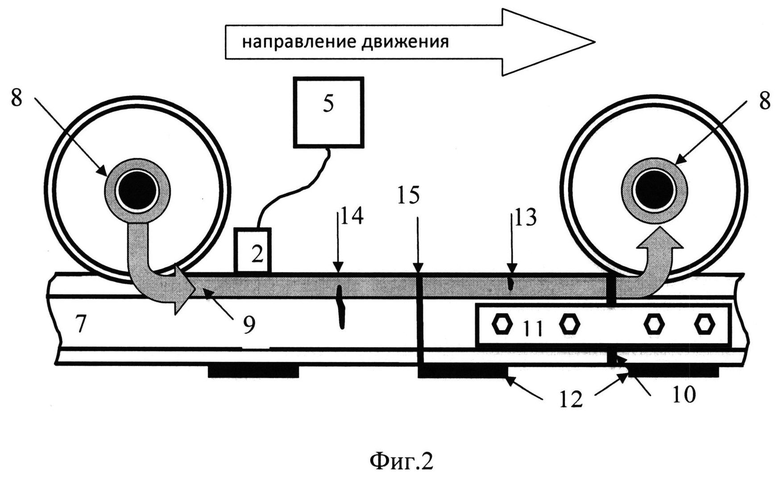
Фиг.2 - схема магнитного дефектоскопа, где:
9 - Магнитный поток.
10 - Болтовой стык рельсов.
11 - Стыковая накладка с болтовыми соединениями.
12 - Рельсовая (шпальная) подкладка.
13 - Поверхностный дефект головки рельса.
14 - Внутренний дефект рельса.
15 - Сварной стык рельсов.
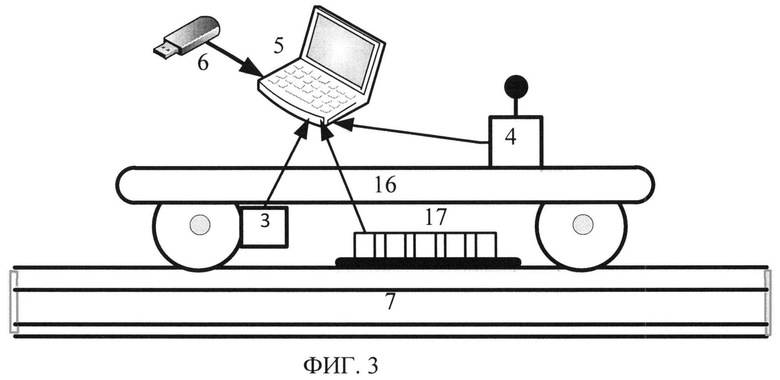
Фиг.3 - дефектоскопическая тележка, где:
16 - Дефектоскопическая тележка.
17 - Электроакустические преобразователи на искательной «лыже».
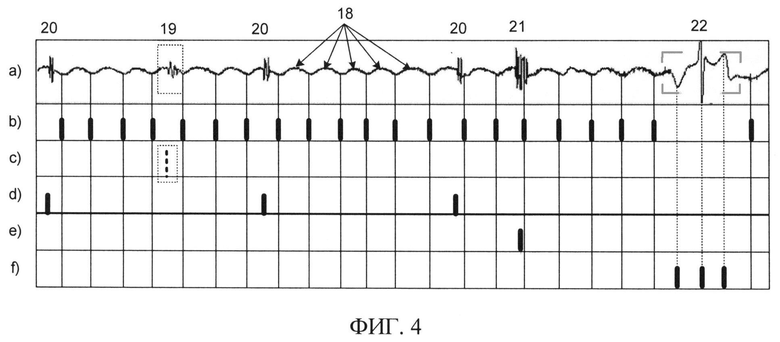
Фиг.4, где:
4а) Сигналы от магнитного дефектоскопа, где:
18 - Сигналы от рельсовых (шпальных) подкладок.
19 - Сигнал от внутреннего дефекта рельса.
20 - Сигналы от сварных стыков рельсов.
21 - Сигнал от поверхностного дефекта головки рельса.
22 - Сигналы в зоне болтового стыка (стыковой зазор и стыковые накладки).
4b) Метки от рельсовых (шпальных) подкладок.
4с) Невыделенная метка от внутреннего дефекта рельса.
4d) Метки от сварных стыков рельсов.
4е) Метка от поверхностного дефекта.
4f) Метки от стыкового зазора и от начала и конца стыковых накладок.
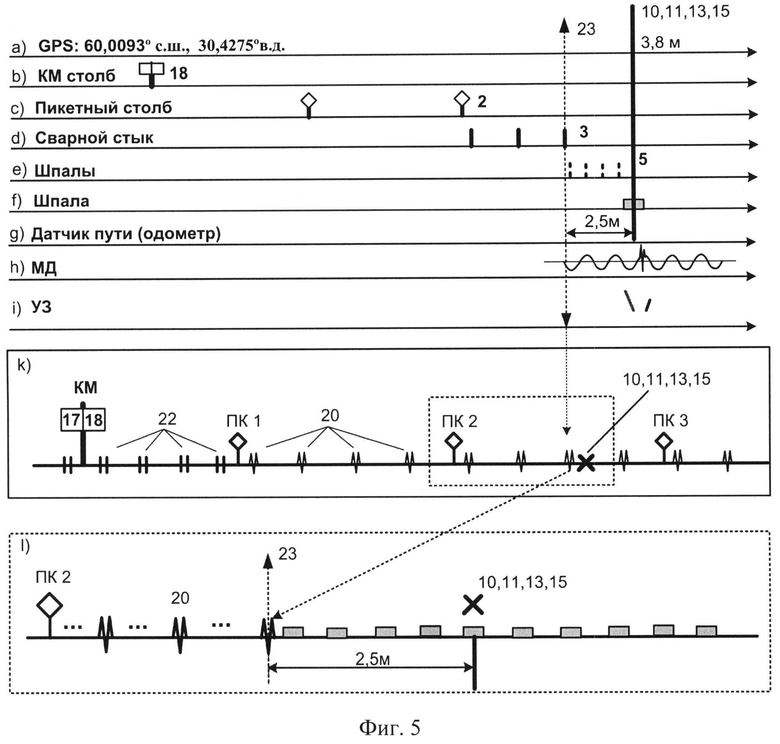
Фиг.5 - диагностическая карта, где:
23 - Маркер;
a) Данные GPS;
b) Маркеры километровых столбов;
c) Маркеры пикетных столбов;
d) Маркеры сварных стыков;
e) Маркеры шпал;
f) Шпалы;
g) Координата от датчика пути дефектоскопа.
h) Сигналы МДД;
i) Сигналы УЗ дефектоскопа;
k) Диагностическая карта на экране дефектоскопной тележки;
1) Увеличенный фрагмент диагностической карты на экране с местонахождением дефекта рельса.
Рассмотрим возможность реализации заявляемого способа по п.1 формулы изобретения.
В качестве основных средств дефектоскопии предлагается использовать МД и УЗ дефектоскопы. Кроме того, для повышения достоверности могут применяться и дополнительные средства, например видеокамеры, позволяющие провести анализ результатов дефектоскопии в лабораторных условиях с визуальным наблюдением подозрительных участков.
Вагон-дефектоскоп 1, фиг.1, устанавливают на рельсы 7 и снабжают средствами МДД, которые включают катушки намагничивания 8, датчик магнитного дефектоскопа 2 и блок обработки 5. Кроме того, в вагоне 1 установлены навигационные средства, соединенные с блоком обработки 5: аппаратура GPS 4 (датчик абсолютных координат) и датчик пути 3. Результаты работы МДД и соответствующие координаты сохраняются в диагностической карте 6.
В процессе движения вагона-дефектоскопа катушки намагничивания 8 возбуждают основное постоянное магнитное поле 9, которое замыкается по металлическим конструкциям: ось колеса, само колесо, рельс, колесо, ось колеса и т.д. Поле не проникает глубоко в рельс, в результате МДД в основном обнаруживает неоднородности, фиг.2 (стыки 10, подповерхностные дефекты головки 13, сварные стыки 15), в головке рельса. Поле рассеяния охватывает окружающее пространство, в том числе конструктивные элементы: стыковые накладки 11 и шпальные подкладки 12. При движении вагона-дефектоскопа неоднородности магнитного поля воспринимает индуктивный датчик 2. Полученные сигналы оцифровываются, сохраняются в диагностической карте 6 и подвергаются анализу в блоке обработки 5 с целью выделения сигналов от конструктивных элементов рельсового пути и дефектов. На фиг.4 а) приведен реальный вид сигналов от МДД, где выделены типовые сигналы: 18 - сигнал от шпальных подкладок 12, 19 - сигнал от внутреннего дефекта рельса 7, который не обнаруживает МДД, 20 - сигнал от сварного стыка рельсов 7, 21 - сигнал от поверхностного дефекта головки рельса 13, 22 - сигналы от стыкового зазора 10 и стыковых накладок 11. Конструктивные элементы рельсового пути 7 хорошо поддаются идентификации по сигналам МДД и сохраняются в диагностической карте в виде координатных меток рельсового пути: метки от шпальных подкладок 12 - фиг.4b, возможная метка от внутреннего дефекта 14 рельса 7, который не обнаружен - фиг.4с, метки от сварных стыков 15 рельсов 7 - 4d, метка от поверхностного дефекта 13 головки рельса 7 - Фиг.4е, метки от стыкового зазора и стыковых накладок - Фиг.4f.
Система абсолютной навигации 4 GPS и т.п. непрерывно или по запросу от МДД формирует данные о координатах вагона-дефектоскопа, фиг.5 а) в интересующих точках рельсового пути 7. Эти данные, как и данные других навигационных подсистем, корректируются с учетом несовпадения местоположения дефектоскопических и навигационных датчиков и сохраняются в диагностической карте 6. Эти навигационные данные являются неточными, но позволяют избежать грубых ошибок привязки. Система относительной навигации «от колеса» 3 обладает рекурсивными свойствами, т.е. способна накапливать ошибки, однако, на коротких участках ее данные обладают высокой точностью и позволяют определить расстояния от выбранного маркера до интересующей точки. Эти данные также сохраняются в диагностической карте 6, фиг.5g. Навигационная система вагона-дефектоскопа может содержать и другие подсистемы, формирующие соответствующие маркеры, например, связанные с километровыми (фиг.5b) и пикетными столбами (фиг.5с), обнаруживаемыми автоматически или отмечаемыми вручную.
Таким образом, с точки зрения навигации диагностическая карта в блоке хранения 6 содержит сетку следующих координатных меток (фиг.5):
а) GPS и т.п. с точностью до нескольких метров.
b) Километровые столбы с точностью до единиц метров (при наличии соответствующих аппаратных или ручных средств обнаружения и фиксации).
c) Пикетные столбы с точностью до нескольких метров (при наличии соответствующих аппаратных или ручных средств обнаружения и фиксации).
d) Сварные стыки с периодичностью 12,5 или 25 м и точностью до нескольких миллиметров в точке стыка.
e) Шпальные подкладки с периодичностью 42-56 см и точностью до десятка сантиметров.
f) Шпалы с точностью до сантиметров.
g) Датчик пути «от колеса» с точностью±10%.
Кроме того, в диагностической карте сохраняются все сигналы МДД (фиг. 4а). Анализ этой информации может производиться оперативно - в процессе движения вагона-дефектоскопа или в лабораторных условиях, в том числе и с использованием предыдущих диагностических карт.
На рельсовое транспортное средство устанавливают УЗ дефектоскоп (Фиг.3). В качестве транспортного средства может выступать тот же вагон-дефектоскоп 1, автомотриса или съемная дефектоскопная тележка. Будем рассматривать вариант с дефектоскопной тележкой 16, на которую устанавливают также системы абсолютной (GPS и т.п.) 4 и относительной («от колеса») навигации 3. УЗ дефектоскоп снабжен совокупностью ЭАП 17. Эти ЭАП по разным схемам прозвучивают рельс с целью обнаружения в них внутренних дефектов и (или) их идентификации. Сигналы ЭАП 17 поступают на блок обработки 5. Таким образом, оператор, перемещая тележку, непрерывно зондирует рельсы УЗ сигналами, получает ответные сигналы, которые сохраняются и отображаются, например, в виде развертки типа В на экране монитора (фиг.5i), по которым оператор пытается обнаружить дефекты. Синхронизация диагностической карты и текущего положения дефектоскопической тележки 16 производится путем сопоставления ее навигационных систем 3 и 4 и меток диагностической карты. Отображаемые элементы диагностической карты имеют логарифмический масштаб по горизонтальной оси расстояний так, чтобы оператор мог одновременно видеть все необходимые ориентиры.
Метки диагностической карты Фиг.5a-g) могут представляться в компактной форме Фиг.5k), 1). Так, на изображении 5k) на экране монитора видно, что интересующий объект находится на 18 километре фиг.5b), после 2-го пикетного столба Фиг.5с) и после третьего сварного стыка фиг.5d). На более подробном изображении Фиг.51) видно, что предполагаемый дефект находится в районе 5-й шпалы фиг.5е), причем располагается посредине ее фиг.5f).
Оператор визуально обнаруживает конструктивные элементы рельсового пути: стыки, шпалы, стрелочные переводы и т.п. Некоторые из этих элементов обнаруживает и УЗ дефектоскоп. Наблюдая диагностическую карту, сигналы УЗ дефектоскопа и реальный путь, оператор визуально легко находит соответствие между ними. Оператор может установить на экране монитора маркер 23 на обнаруженный им элемент рельсового пути, например сварной стык (фиг.5d), и блок обработки 5 укажет расстояние до интересующего места рельса из диагностической карты, которое должно быть обследовано более подробно, например, там обнаружен поверхностный дефект. Кроме того, в соответствии с фиг.5 оператор может увидеть, что до дефекта, обнаруженного МД по первой строке - что по данным GPS осталось 3,8 метра, а что от третьего сварного стыка осталось 2,5 метра. Последнее расстояние с достаточной точностью можно определить датчиком пути 3 дефектоскопа.
Приближаясь к подозрительному участку рельса (10, 11, 13 или 15), оператор тележки повышает чувствительность УЗ дефектоскопа и проводит более подробное исследование подозрительного участка. При этом он может перейти от обзорного В-скана к более подробному А-скану. Естественно, эти операции в дефектоскопе могут быть автоматизированы. Для более уверенного принятия решения о степени опасности обнаруженного дефекта оператор может подключить к одному из каналов дефектоскопа ручной ЭАП и дополнительно просканировать дефектное сечение с других поверхностей рельса (с боковых частей головки, шейки или перьев подошвы рельса).
По п.2 формулы изобретения диагностическая карта корректируется при каждом проходе вагона-дефектоскопа 1 и тележки 16, что позволяет иметь оперативную информацию о состоянии рельсового пути и своевременно предпринимать необходимые действия. В частности, проверка УЗ дефектоскопом может показать, что опасного дефекта, обнаруженного МД дефектоскопом, нет. Анализ визуального изображения рельса может показать, что причиной появления сигнала МД дефектоскопа является посторонний предмет, расположенный рядом с рельсом.
Таким образом, заявляемый способ диагностики позволяет с высокой достоверностью проводить диагностику рельсового пути благодаря рациональному сочетанию магнитных и ультразвуковых методов дефектоскопии. Предлагаемая система навигационной привязки к конструктивным элементам рельсового пути позволяет оператору УЗ дефектоскопа быстро и точно обнаружить местоположение дефекта. Навигационная привязка к рельсу и его конструктивным особенностям является регулярной и наиболее точной по сравнению с любыми искусственно созданными магнитными, радио- и другими маркерами и может быть использована для решения разнообразных задач исследования железнодорожной инфраструктуры.
Источники информации
1. Патент RU 2228870.
2. Патент GB 2426340.
3. Патент US 5825177.
4. Патент US 2002099507.
5. Патент US 5970438.
6. Патент RU 2438903.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| Способ магнитного обнаружения регулярных объектов рельсов | 2017 |
|
RU2671368C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ И СИНХРОНИЗАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ | 2018 |
|
RU2680927C1 |
| Способ определения стрелочных переводов и положения остряков | 2017 |
|
RU2652673C1 |
| Способ прогнозирования развитий аномалий в головке рельсов | 2019 |
|
RU2699942C1 |
| Способ комплексной диагностики рельсов | 2017 |
|
RU2642687C1 |
| Способ определения длин рельсов уравнительных пролетов и мест временного восстановления плети по сигналам дефектоскопии | 2022 |
|
RU2785306C1 |
| Способ обнаружения и оценки сварных стыков рельсов | 2017 |
|
RU2696066C2 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ определения расстояний между шпалами рельсового пути | 2019 |
|
RU2703802C1 |
Изобретение относится к способам и средствам неразрушающего контроля материалов и может быть использовано для диагностики рельсов и других протяженных объектов. Способ заключается в том, что магнитным дефектоскопом, установленным на вагоне-дефектоскопе, обследуют участок рельсового пути. Обнаруживают дефекты и конструктивные элементы (болтовые и сварные стыки рельсов, рельсовые металлические подкладки и т.п.), сигналы от которых и их положение сохраняют в диагностической карте. Используют данные о конструктивных элементах рельсового пути для навигации при ультразвуковой (УЗ) дефектоскопии того же участка рельсового пути. Подробно анализируют УЗ дефектоскопом объекты, обнаруженные магнитным дефектоскопом. Корректируют диагностическую карту по результатам дефектоскопии. В результате повышается точность, качество и скорость обнаружения дефектов рельсов. 1 з.п. ф-лы, 5 ил.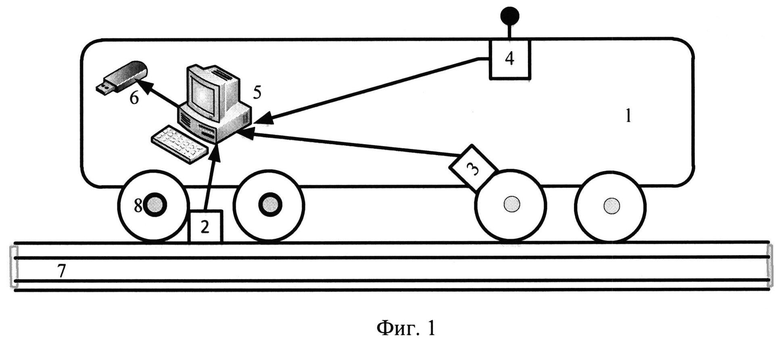
1. Способ диагностики рельсового пути, заключающийся в том, что на рельсовое транспортное средство устанавливают средства дефектоскопии рельсов, а также системы глобальной спутниковой навигации и относительной навигации с использованием колеса рельсового транспортного средства, перемещают рельсовое транспортное средство по участку рельсового пути, постоянно зондируют рельсы средствами дефектоскопии, принимают от них ответные сигналы, которые сохраняют совместно с данными систем глобальной и относительной навигации в виде диагностической карты участка рельсового пути, оперативно и в лабораторных условиях анализируют сигналы средств дефектоскопии, принимают решение о степени опасности обнаруженных дефектов, определяют по диагностической карте их координаты и выбирают соответствующие действия, отличающийся тем, что в качестве средства дефектоскопии рельсового транспортного средства используют магнитный дефектоскоп, при анализе принятых сигналов распознают и отмечают сигналы от дефектов и конструктивных элементов рельсового пути, координаты последних сохраняют в диагностической карте пути в качестве дополнительных относительных координат рельсового пути, устанавливают на рельсовое транспортное средство ультразвуковой дефектоскоп, перемещают и постоянно синхронизируют положение ультразвукового дефектоскопа с диагностической картой участка рельсового пути, используя системы глобальной и относительной навигации, а также визуальное наблюдение рельсового пути оператором, повышают степень детализации измерений ультразвуковым дефектоскопом в окрестностях дефектов и конструктивных элементов рельсового пути, хранящихся в диагностической карте рельсового пути, анализ сигналов магнитного и ультразвукового дефектоскопов проводят совместно.
2. Способ диагностики по п.1, отличающийся тем, что корректируют диагностическую карту по результатам каждого прохода участка рельсового пути средствами дефектоскопии.
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| ДЕФЕКТОСКОПНАЯ ТЕЛЕЖКА ДЛЯ СОВМЕЩЕННОГО МАГНИТНОГО И УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2225308C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| EP 0953491 B1, 07.12.2005 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

